
Большая перегрузочная способность
Тиристорные электроприводы с двигателями смешанного возбуждения позволяют использовать такие преимущества этих двигателей, как большая перегрузочная способность и более благоприятная форма естественной механической характеристики, обеспечивающая при меньших грузах большие частоты вращения.
В заключение необходимо отметить, что приборы электромагнитной системы из-за дешевизны, простоты устройства и большой перегрузочной способности широко используются в промышленных электротехнических устройствах низкой частоты в виде амперметров и вольтметров.
Такие двигатели при меньшем, чем у других двигателей, относительном росте величины тока дают большую перегрузочную способность; при малых нагрузках скорость двигателей увеличивается.
Двигатели постоянного тока более удобны для использования в грузоподъемных машинах, так как они обладают большей перегрузочной способностью, позволяют осуществлять регулирование скорости в широких пределах и могут использоваться с большей частотой включений в час, чем двигатели переменного тока.
В настоящее время имеют применение электроприводы с широким диапазоном плавного регулирования частоты вращения и с большими перегрузочными способностями. Частотный способ является наиболее экономичным способом регулирования частоты вращения, и широкое применение получают частотно-регулируемые электроприводы на базе асинхронных двигателей с короткозамкнутым ротором.
В настоящее время промышленность выпускает электродвигатели переменного тока с короткозамкнутым ротором серии МАП, которые отличаются большой перегрузочной способностью, могут работать в кратковременном и повторно-кратковременном режимах. Электродвигатели изготовляют в закрытом исполнении. На конце вала электродвигателя смонтирован тормоз типа ТМТ.
В настоящее время i идравлический привод механизмов грузоподъемных машин находит все более широкое применение благодаря следующим преимуществам: большой перегрузочной способности по мощности и моменту; возможное.
Основные достоинства этих приборов заключаются в том, что они пригодны для цепей постоянного и переменного тока и обладают большой перегрузочной способностью. Электромагнитные приборы специальных типов допускают стократную кратковременную перегрузку.
|
Нагрузочная диаграмма электропривода токарно. го станка. |
Электродвигатели вспомогательных механизмов станка работают, как правило, в кратковременном режиме и выбираются с повышенным пусковым моментом и большой перегрузочной способностью для зажимных устройств.
|
Прибор детекторной системыГа принципиальная схема. б однополупериодная схема. в двухполупериодная схема. г мостовая схема. |
Достоинствами приборов является простота конструкции, надежность действия, возможность изготовления многопредельных вольтметров и амперметров, малая потребляемая мощность и сравнительно большая перегрузочная способность.
|
Прибор для измерения переменного тока с выпрямителем. а, б — схема однополупериодного выпрямления., г — схема двухполупериодного выпрямления.| Схема термоэлектрического прибора. а — с контактным термопреобразователем, б — с бесконтактным. |
Достоинствами вынрямительных приборов является простота конструкции, надежность действия, возможность изготовления многопредельных вольтметров и амперметров, малая потребляемая мощность и относительно большая перегрузочная способность.
В настоящее время в качестве зарядных, подзарядных и заряд-но-подзарядных агрегатов широко используют статические кремниевые и селеновые выпрямительные устройства с большим сроком службы и большой перегрузочной способностью. В отличие от двигатель-генераторов они не имеют движущихся частей и более удобны в обслуживании.
Конструкция
Конструкция асинхронного двигателя, пожалуй, самая простая среди его аналогов. Он состоит из ротора и статора. Зачастую на статоре расположена трёхфазная обмотка, исключение составляют двигатели, предназначенные для работы в однофазной сети с двухфазной обмоткой или с рабочей и пусковой обмоткой. Статор состоит из металлического корпуса и сердечника с обмотками (собственно их называют обмоткой статора).
Так как двигатель питается переменным током, возникает проблема, связанная с потерями на блуждающие токи (т.н. токи Фуко), для этого сердечник статора набирают из тонких пластин. Стальные пластины для предотвращения контакта друг с другом изолируются окалиной, скрепляются лаком. Ток, протекающий в обмотках статора, называют током статора.
Корпус статора закрывается с двух сторон подшипниковыми щитами, в них, соответственно, устанавливаются подшипники скольжения или качения, в зависимости от мощности и размеров машины. Подшипники закрываются крышками, это нужно для их смазки, обычно используют пластичную смазку, как литол, солидол и подобные.
Реже, в больших и мощных электрических машинах могут использоваться опорные подшипники скольжения с циркуляционной системой смазки (жидкостная смазка). В них маслонасос закачивает масло, в рабочем режиме ротор таких машин скользит по тонкой масляной плёнке, подобно тому, как это происходит во вкладышах на ДВС.
По конструкции корпуса и типу крепления различают двигатели на лампах или с фланцевым креплением, также бывают с комбинированным типом крепления — с лапами и фланцем.
В зависимости от типа двигателя вал из него может выходить как с одной, так и с обеих сторон. К нему присоединяется исполнительный механизм, для этого конец выполняется конической или цилиндрической формы или с проточкой для установки шпонки и соединения с исполнительным механизмом.
В большинстве электродвигателей используется принудительное воздушное охлаждения. Для этого на корпусе продольно располагаются рёбра, а на другом конце вала устанавливается крыльчатка вентилятора охлаждения. Во время работы двигателя она вращается и прогоняет воздух вдоль рёбер, забирая тепло от статора.
Что такое пусковой ток двигателя
Если взять любой технический паспорт к двигателю, то там кроме рабочего тока, мощности, оборотов, типа соединения полюсов и напряжения можно найти такой параметр как пусковой ток. В этой статье я хочу подробно остановиться именно на этом параметре и рассказать, что это такое и каким образом можно измерить пусковой ток у реального двигателя. Итак, начнем.
Пусковой ток и его кратность
Итак, для начала давайте дадим определение. Пусковой ток — это ток, потребляемый электродвигателем в момент его запуска (раскручивания). В большинстве случаев этот ток больше рабочего в 6-8 раз. Величина, показывающая во сколько раз больше пусковой ток, называется кратностью и записывается как коэффициент:
Получается, если известен коэффициент, то пусковой ток найти крайне легко по этой формуле:
Кратность пусковых токов имеет прямую зависимость от мощности самого движка и от того сколько пар полюсов в нем реализовано. То есть при меньшей мощности будет меньший пусковой ток. А в случае с парами полюсов, чем их меньше, тем пусковой ток больше.
Получается, что, наибольшим пусковым током обладают двигатели с оборотами 3000 об/мин, двумя полюсами и мощностью более 10 кВт (7-9 крат от номинала).
Почему так происходит
Все дело в том, что потребление тока и инерционный момент при запуске зависит от конструктивных особенностей двигателя и от того, каким образом произведена намотка обмоток.
Мало полюсов – это минимальное сопротивление обмоток. Такое низкое сопротивление – это автоматически большой ток. А еще высокооборотистым движкам для полного выхода на рабочие параметры необходимо больше времени, а это автоматически тяжелый пуск.
Виды электродвигателей
Существуют следующие типы двигателей постоянного тока:
- с возбуждением при помощи постоянных магнитов;
- с последовательным соединением якоря и обмоток возбуждения;
- с параллельным соединением якоря и обмоток возбуждения;
- со смешанным соединением якоря и обмоток возбуждения;
- вентильный двигатель (бесколлекторный двигатель постоянного тока), выполненный при помощи замкнутой системы; в таком типе двигателя используется инвертор (силовой полупроводниковый преобразователь), преобразователь координат и ДПР (датчик положения ротора).
Двигателем переменного тока называют электрический двигатель, питание которого обеспечивает переменный ток. Существуют следующие типы двигателей переменного тока:
- гистерезисный двигатель;
- вентильный реактивный двигатель;
- асинхронный электродвигатель с частотой вращения ротора, отличающейся от частоты вращения создаваемого напряжением магнитного поля;
- синхронный электродвигатель с частотой вращения ротора, совпадающей с частотой вращения создаваемого напряжением магнитного поля.
Также существует УКД (универсальный коллекторный двигатель) с функцией режима работы как на переменном, так и на постоянном токе.
Ещё один тип двигателей – это шаговый электродвигатель с конечным числом положений ротора. Определённое указанное положение ротора фиксируется при помощи подачи питания на необходимые соответствующие обмотки. При снятии напряжения питания с одной обмотки и его передаче на другие происходит процесс перехода в другое положение.
Двигатель переменного тока при питании посредством промышленной сети обычно не позволяет достичь частоты вращения более трёх тысяч оборотов в минуту. По этой причине при необходимости получить более высокие частоты используется коллекторный двигатель, дополнительными преимуществами которого является лёгкость и компактность при сохранении необходимой мощности.
 Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Иногда также применяют специальный передаточный механизм под названием мультипликатор, который меняет кинематические параметры устройства до требуемых технических показателей. Коллекторные узлы иногда занимают до половины пространства всего двигателя, поэтому электродвигатели переменного тока уменьшают в размере и делают легче в весе путём использования преобразователя частоты, а иногда благодаря наличию сети с повышенной частотой до 400 Гц.
Ресурс любого асинхронного двигателя переменного тока заметно выше коллекторного. Определяется он состоянием изоляции обмоток и подшипников. Синхронный же двигатель при использовании инвертора и датчика положения ротора считается электронным аналогом классического коллекторного двигателя, поддерживающего работу посредством постоянного тока.
Выбор мощности электродвигателя
Для обеспечения надежной и экономичной работы системы электропривода необходимо произвести выбор электродвигателя правильно. Электрическая машина должна иметь мощность, которая строго соответствует ожидаемой нагрузке, а также режиму работы электропривода. Электропривод довольно сильно распространен в промышленности, имеет большое множество условий работы и требований рабочих машин, что делает выбор мощности электродвигателя не легкой задачей.
Завышение мощности электрической машины не является выходом из ситуации. Это связано с тем, что помимо излишних экономических затрат на завышенную мощность вырастают и габариты электродвигателя, его масса, ухудшаются энергетические показатели системы (машина работает с пониженным КПД), а в случае асинхронных электродвигателей с низким коэффициентом мощности cosφ увеличивается потребление реактивной мощности, что в свою очередь создает дополнительные проблемы. Занижение мощности то же не выход, так как это приведет к повышению температуры изоляции обмоток, соответственно срок службы машины существенно снижается.
Даже если выбор электрической машины осуществлен правильно, то в процессе работы могут возникать кратковременные толчки нагрузки (резкое увеличение момента сопротивления), которые могут значительно превосходить номинальную мощность электромашины. Однако, каждый тип электрической машины имеет свои факторы электрического происхождения, которые даже при кратковременной перегрузке (если она превзойдет определенный предел) могут вызвать нарушение нормальной работы механизма. При выборе электродвигателя необходимо руководствоваться двумя основными факторами – мгновенной перегрузкой и нагревом.
5.2. ПРИНЦИП ОБРАЗОВАНИЯ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ МАШИНЫ
На статоре трехфазного
двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению
друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты
друг от друга во времени на 1/3 периода (рис. 5.2.1.).
Используя график изменения
трехфазного тока, проставим на нем несколько отметок времени; tl,
t2, t3,…tn. Наиболее удобными будут отметки,
когда один из графиков пересекает ось времени.
Теперь рассмотрим электромагнитное
состояние обмоток статора в каждые из принятых, моментов времени.
Рассмотрим вначале точку
t1. Ток в фазе А равен нулю, в фазе С он будет положительным — (+)
, а в фазе В — отрицательным (·) (рис. 5.2.2, а).
Поскольку каждая фазная обмотка имеет замкнутую форму, то конец фазной обмотки
В-У будет иметь противоположный знак, т.е. У — (+), а конец Z обмотки C-Z — (·).
Известно, что вокруг проводника
с током всегда образуется магнитное поле. Направление его определяется правилом
правоходового винта («буравчика»).
Проведем силовую магнитную
линию вокруг проводников С и У и, соответственно, В и Z (см. штриховые линии
на рис. 5.2.2 a).
Рассмотрим теперь момент
времени t2. В это время тока в фазе В не будет. В проводнике А фазы
А-Х он будет иметь знак (+), а в проводнике С фазы C-Z он будет иметь знак (·).
Теперь проставим знаки:
в проводнике Х — (·), а в проводнике Z — (+).
Проведем силовые линии
магнитного поля в момент времени t2 (рис. 5.2.2,б). Заметим при этом,
что вектор F совершил поворот.
Аналогичным образом проведем
анализ электромагнитного состояния в фазных обмотках статора в момент времени
t3,…tn (рис. 5.2.2, б, в, г, д).
Из рисунков 5.2.2 наглядно видно, что магнитное поле в обмотках и его поток Ф
совершают круговое вращение.
Частота вращения магнитного поля статора определяется следующей формулой:
где f — частота тока питающей сети, Гц; p — число пар полюсов.
Если принять f=50 Гц, то
для различных чисел пар полюсов (р=1, 2, 3, 4, )
n1=3000, 1500, 1000, 750, об/мин.
5.18.5 Сельсины
Представим себе два асинхронных двигателя с фазным
ротором включенным последующей схеме (рис. 5.18.5.1). Обмотки статора С1,
С2, С3, называемые обмотками возбуждения, включены в общую
сеть трехфазного тока.
Обмотки ротора P1, P2, P3
объединены трехпроводниковой линией связи. Магнитные потоки обмоток возбуждения
при q1=q2 наводят в соответствующих
обмотках роторов равные и совпадающие по фазе ЭДС.
Если ротор двигателя Д1 повернуть на угол q1,
а ротор Д2 оставить на месте (q2=0), то в фазных обмотках
ротора двигателя Д2 будет наведена ЭДС E2>E1. В результате
в линии связи потечет ток DI от большего потенциала к меньшему.
,
где 2z — сумма сопротивлений обмоток роторов и линии связи.
Этот ток, пройдя по обмоткам роторов, взаимодействуя
с магнитными полями статоров, вызовет образование дополнительных вращающих моментов
DM. Поскольку направление момента DМ в каждом двигателе
будет свое, то в одном из них произойдет поворот ротора вправо (у двигателя
Д2), а у другого — влево (у двигателя Д1).
Следовательно, оба двигателя самостоятельно (синхронно)
придут в положение (q1=q2).
Такая система получила название синхронно-следящей.
Практическое использование эта система получила
в многоприводных механизмах (конвейерах, козловых кранах и т.п.).
В автоматике применяются так называемые сельсины.
Это маломощные асинхронные машины с однофазным статором и трехфазным ротором.
Сельсины применяются для целей измерения или определения
угла, на который повернулся определенный механизм.
В сельсинной передаче всегда используются две машины:
сельсин-датчик и сельсин-приемник.
Обмотки возбуждения бывают обычно однофазные и
располагаются на явновыраженных полюсах. Число полюсов всегда два. Обмотки синхронизации
— трехфазные, размещаются в пазах ротора и оканчиваются тремя контактными кольцами
(рис. 5.18.5.2).
В отличие от силовых синхронно-следящих систем,
поворот ротора сельсина-датчика осуществляется принудительно, а ротор сельсина-приемника
приходит в движение автоматически. Поворот ротора фиксируется индикаторной стрелкой.
При наличии однофазных обмоток возбуждения на статоре
поворот ротора сельсина-датчика может осуществляться в любую сторону, т.к. пульсирующее
магнитное поле статора обеспечивает для этого необходимые условия.
Помимо приведенного индикаторного режима, сельсины
могут работать и в так называемом трансформаторном режиме.
В этом случае сельсин-приемник, не только показывает
угол рассогласования q, но и вырабатывает электрический сигнал
для управления мощным механизмом
Схема соединения обмоток статора
Так как в статоре односкоростного асинхронного двигателя расположено три обмотки, то для подключения к трёхфазной сети их необходимо как-то соединить. Как и в любой трёхфазной цепи различают две схемы соединения:
1. «Звезда». Концы обмоток соединяются вместе, напряжение подводится к их началам.
2. «Треугольник». Начало следующей обмотки соединяется с концом предыдущей.
Концы обмоток выводятся в клеммную коробку, которую еще называют «брно» или «борно» (мне не удалось найти правильного названия, а в словаре указаны оба варианта). В зависимости от типа и конструкции двигателя в «борно» может быть выведено 3 или 6 проводов. Если выведено 3 провода – то обмотки соединены «с завода» по определенной схеме, а если 6, то вы можете выбрать схему подключения исходя из напряжения питающей сети.
В зависимости от года производства и производителя электродвигателя могут применяться такие обозначения выводов обмоток, как приведены в таблице ниже.
Концы обмоток на клеммнике расположены таким образом, чтобы с помощью одного комплекта из трёх перемычек можно было соединить обмотки по нужной схеме. Для соединения по схеме звезды перемычки устанавливают в ряд на концы обмоток, а для треугольника – параллельно друг другу соединяя «верхние» и «нижние» клеммы. Для этого начала и концы обмоток смещены друг относительно друга, что вы увидите на следующей иллюстрации.
5.1. общие сведения и конструкция асинхронного двигателя
Понятие асинхронной машины
связано с тем, что ротор ее имеет частоту вращения, отличающуюся от частоты
вращения магнитного поля статора.
Буква «а» здесь
играет как бы роль отрицания или нестрогого следования ротора за синхронно вращающимся
магнитным полем статора.
Создателем этой простой
по конструкции, но удобной и надежной в работе машины является русский инженер
М.О. Доливо-Добровольский. Асинхронный двигатель, впервые разработанный в 1889
году, практически не подвергся серьезным изменениям до наших дней.
В основу конструкции асинхронного
двигателя положено создание системы трехфазного переменного тока принадлежащее
этому же автору.
Переменный ток, подаваемый
в трехфазную обмотку статора двигателя, формирует в нем вращающееся магнитное
поле.
Основными конструктивными
элементами асинхронного двигателя являются неподвижный статор и подвижный ротор
(рис. 5.1.1). Статор и ротор разделены воздушным зазором от 0,1 мм до 1,5 мм.
Пакет статора c целью уменьшения потерь на вихревые токи набирают из штампованных
листов электротехнической стали. На внутренней полости статора имеются пазы,
в которые укладываются провода обмотки. Листы статора перед сборкой в пакет
изолируют слоем лака или окалины, полученной при их отжиге.
В пазы статора укладывают
обмотку, которая в простейшем случае состоит из трех катушек — фаз, сдвинутых
в пространстве на 120 эл. градусов. Ротор асинхронного двигателя представляет
собой цилиндр, набранный из штампованных листов электротехнической стали. На
поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора
специально не изолируют, т.к. в большинстве случаев достаточно изоляции от окалины.
В зависимости от типа обмотки
роторы двигателей обычного исполнения делятся на короткозамкнутые и фазные.
Обмотка короткозамкнутого
ротора представляет собой медные стержни, забитые в пазы. С двух сторон эти
стержни замыкаются кольцами. Соединения стержней с кольцами осуществляется пайкой
или сваркой (рис. 5.1.2).
Чаще всего короткозамкнутую
обмотку выполняют расплавленным, алюминием и литьем под давлением. При этом
вместе со стержнями и кольцами отливаются и лопатки вентилятора.
Двигатели большой мощности
имеют на роторе фазную обмотку. Конструкция ее аналогична обмотке статора. Концы
этой обмотки выведены на контактные кольца. С помощью этих колец и токосъемных
щеток к обмотке ротора подключают дополнительные сопротивления.
Работоспособность двигателей постоянного тока
Электрические двигатели имеют ограниченную пропускную способность. Для двигателя постоянного тока это означает, что с увеличением мощности потока энергии через двигатель возрастает искрение у контактных поверхностей щеток, и при некоторой мощности степень искрения превышает допустимый уровень. Степень искрения зависит от величины коммутируемого тока. Исходя из этого, в качестве главного фактора, ограничивающего перегрузочную способность двигателя постоянного тока, рассматривается коммутация тока на коллекторе.
Причины искрения на щетках связаны с характером протекания электромагнитных процессов в коммутируемых секциях. Определяющая роль в формировании процессов коммутации принадлежит реактивной электродвижущей силе, величина которой зависит от коммутируемого тока и скорости вращения якоря. При одном и том же значении тока увеличение скорости вращения приводит к увеличению реактивной э.д.с. , что в свою очередь, приводит к повышению степени искрения. При одном и том же значении скорости вращения рост тока также приводит к увеличению реактивной э.д.с. и степени искрения. Отмеченные особенности процессов коммутации приводят к тому;, что одной и той же степени искрения соответствует постоянство произведения тока I на скорость вращения якоря . Кратковременно допустимому току соответствует степень искрения 2. Следовательно, допустимая по условиям коммутации/область работы двигателя ограничена гиперболами (рис. 1)

Рис.1. Область безотказной (по условиям коммутации) работы
Для оценки работоспособности двигателя по условиям перегрузки вводится понятие о перегрузочной способности по току (1.1). В ряде случаев в первой зоне регулирования скорости перегрузочная способность по току , принимается постоянной и равной значению этой величины при номинальной скорости (рис.2). Здесь характеристика , приводится лишь для первого квадранта, так как для остальных квадрантов эта характеристика аналогична.
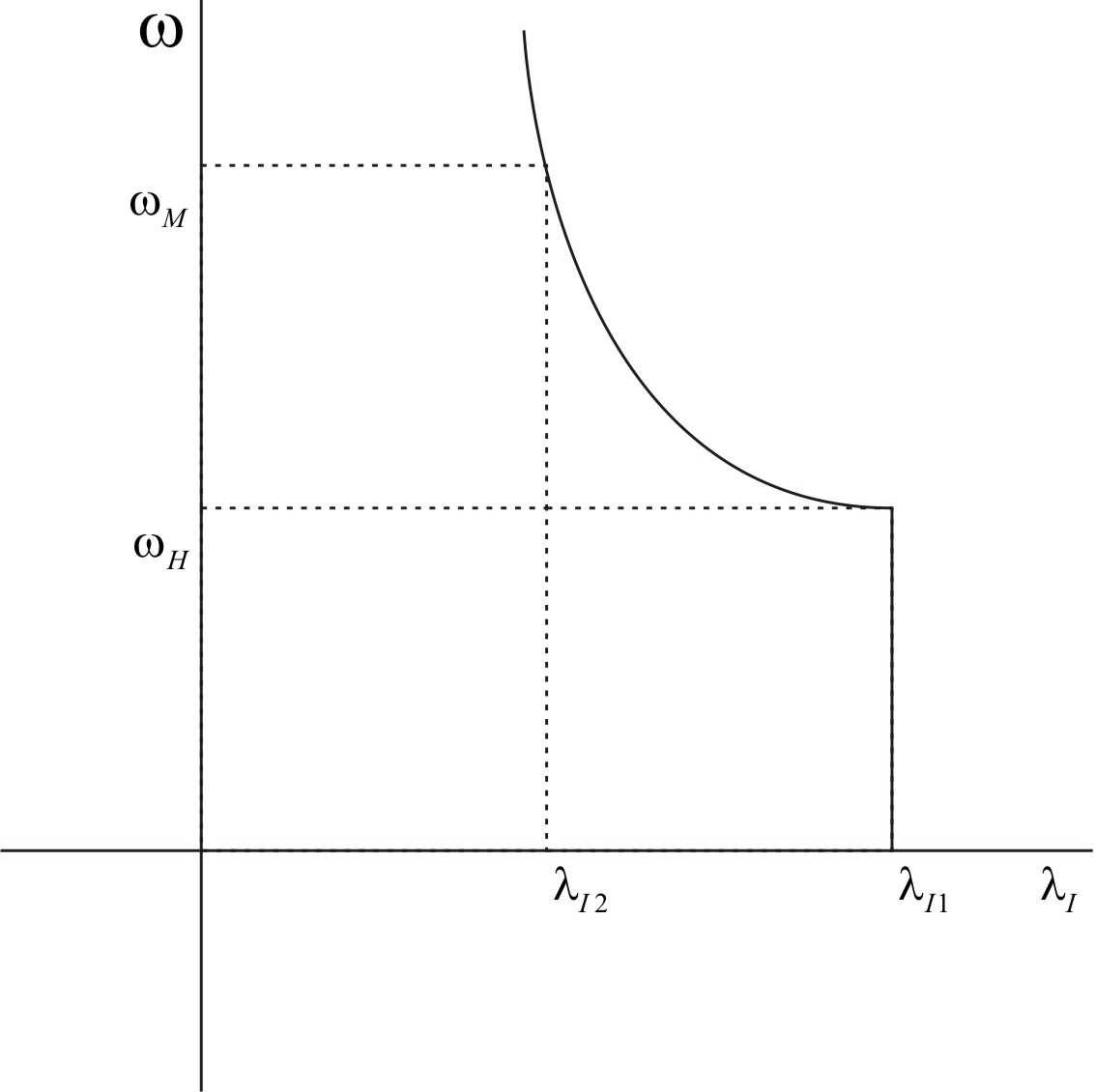
Рис.2. Перегрузочная способность двигателя.
При двухзонном регулировании обязательно нужно учитывать снижение перегрузочной способности двигателя. Так соответствующая скорости вращения перегрузочная способность равна
| (1.2) |
Для электроприводов важной характеристикой является перегрузочная способность двигателя по моменту
| (1.3) |
Здесь , — номинальный и допустимый момент соответственно.
В первой зоне регулирования перегрузочная способность по моменту равна перегрузочной способности по току:
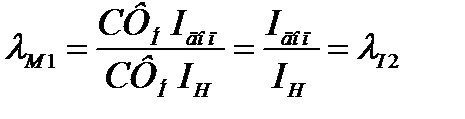 |
(1.4) |
Во второй зоне регулирования при одном и том же значении допустимого тока величина допустимого момента снижается из-за снижения потока возбуждения:
| (1.5) |
С учетом снижения значения обратно пропорционально значению скорости получим зависимость
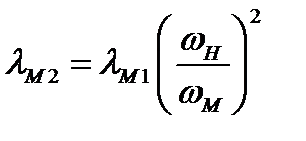 |
(1.6) |
Из (1.6) следует, что при значительном увеличении скорости за счет снижения потока возбуждения допустимый по условиям перегрузки момент резко снижается. Вследствие этого переход во вторую зону регулирования должен сопровождаться снижением нагрузки на валу.
Для двигателей постоянного тока общепромышленного применения и для крупных двигателей ; для двигателей краново-металлургических серий .
Машины специального применения могут иметь более высокую перегрузочную способность.
 studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.004 с) .
studopedia.org — Студопедия.Орг — 2014-2021 год. Студопедия не является автором материалов, которые размещены. Но предоставляет возможность бесплатного использования (0.004 с) .
Как проверить двигатель на перегрузочную способность
Выбрав двигатель подходящей мощности и нужных оборотов по каталогу производителя, убедившись, что значения его номинальных напряжения и тока соответствуют вашей сети, подобрав тип крепления и условия вентиляции именно для вашего оборудования, убедившись, что исполнение корпуса подходит для условий окружающей среды, — двигатель необходимо проверить. И проверяют двигатель не просто на работоспособность, а на перегрузку, на нагрев, на условия пуска в установленном виде.

Поверка на нагрев
Для проверки двигателя на нагрев применяют методы эквивалентного тока, эквивалентной мощности, эквивалентного момента.
Проверку по методу эквивалентного тока применяют тогда, когда имеется точный, заранее полученный, график зависимости тока от времени в процессе работы двигателя. Такой график получается экспериментальным или расчетным путем. И если двигатель по результатам проверки удовлетворяет условию:
то проверку по нагреву он проходит.
Проверка по методу эквивалентного момента подойдет тем двигателям, которые работают при постоянном магнитном потоке. К таким двигателям относятся: двигатели постоянного тока с независимым возбуждением и асинхронные двигатели, работающие при скольжении близком к номинальному. Двигатель пройдет проверку на нагрев, если будет выполнено условие:
Проверку по методу эквивалентной мощности применяют лишь для тех двигателей, работа которых предполагается не только при постоянном магнитном потоке, но и при постоянных оборотах. Данные условия соблюдаются тогда, когда двигатель работает под переменной нагрузкой меньше номинальной при почти постоянных оборотах. Условие проверки следующее:
Когда двигатель работает повторно кратковременно, то эквивалентный ток, эквивалентный момент и эквивалентная мощность берутся исключительно в рабочие промежутки времени, паузы исключаются из рассмотрения. Если теоретические значения продолжительностей включения (ПВ) отличаются от стандартных, то эквивалентное значение продолжительности включения приводится к стандартному значению ПВ вот так:
Проверка считается успешной, если двигатель удовлетворяет условиям нагрева при заданном ПВст:
Если эквивалентные мощность, момент или ток, превысят номинал данного двигателя, то перегрев будет недопустимым, а значит необходимо будет выбрать двигатель большей номинальной мощности, после чего повторить проверку на перегрев с учетом реальных ПВ.
Проверка на перегрузку
Исходя из известной нагрузочной диаграммы (зависимость момента на валу от времени), проверяют двигатель на перегрузку по следующим условиям:
Проверку по условиям пуска выполняют исходя из следующих условий:
Ранее на эту тему: Электропривод
Не пропустите обновления, подпишитесь на наши соцсети: