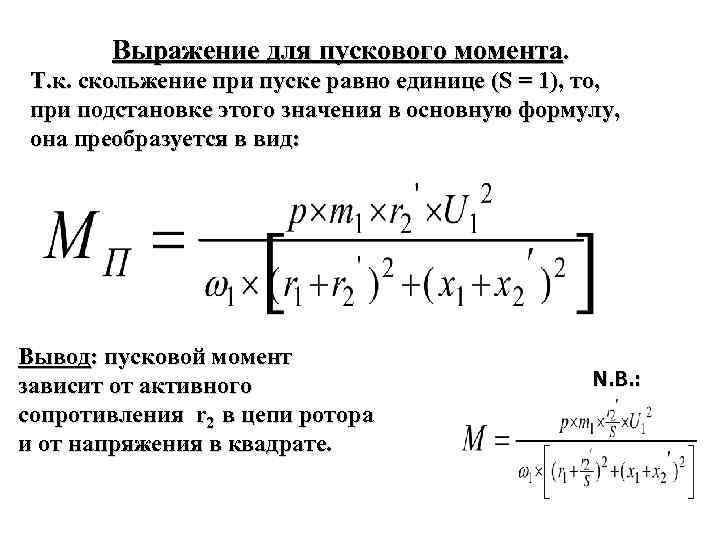
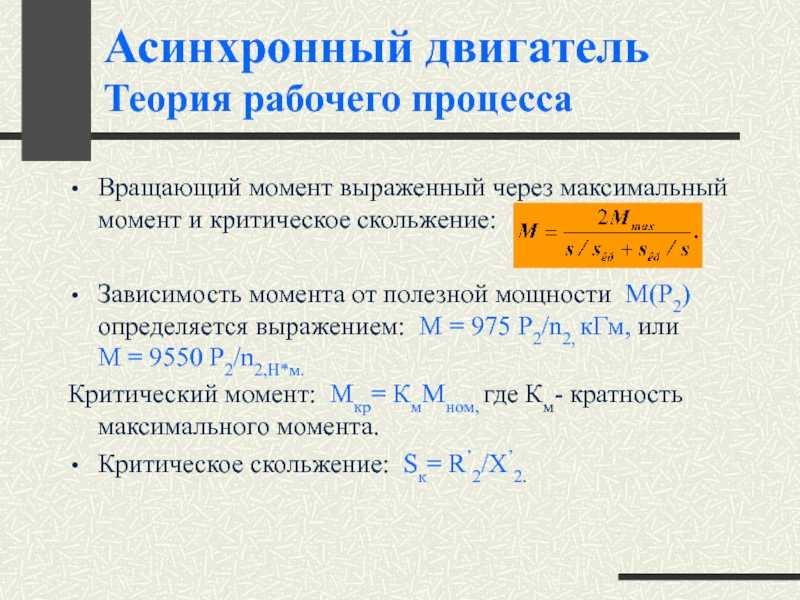
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M — крутящий момент, Нм;
F — прикладываемая сила, H;
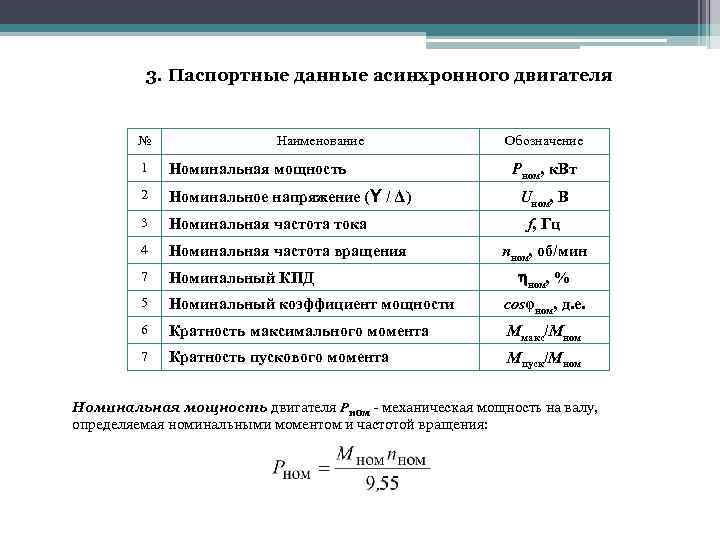
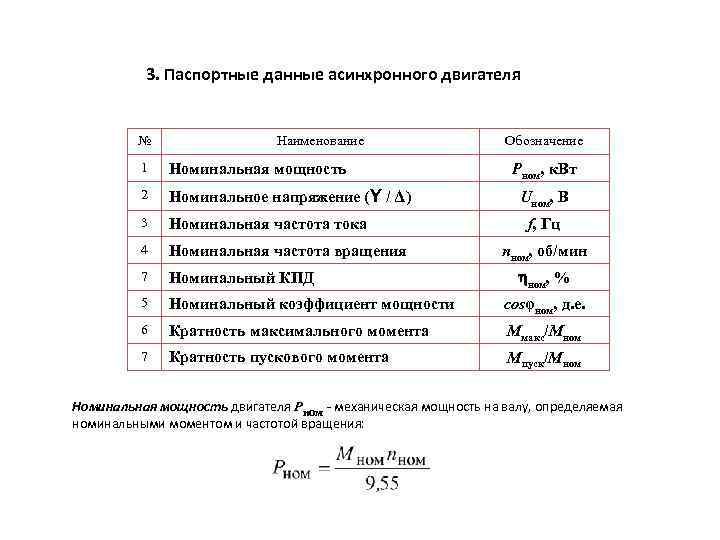
Для расчета номинального вращающего момента привода используют формулу
Рном — номинальная мощность электрического двигателя, Вт;
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Режим холостого хода[править | править код]
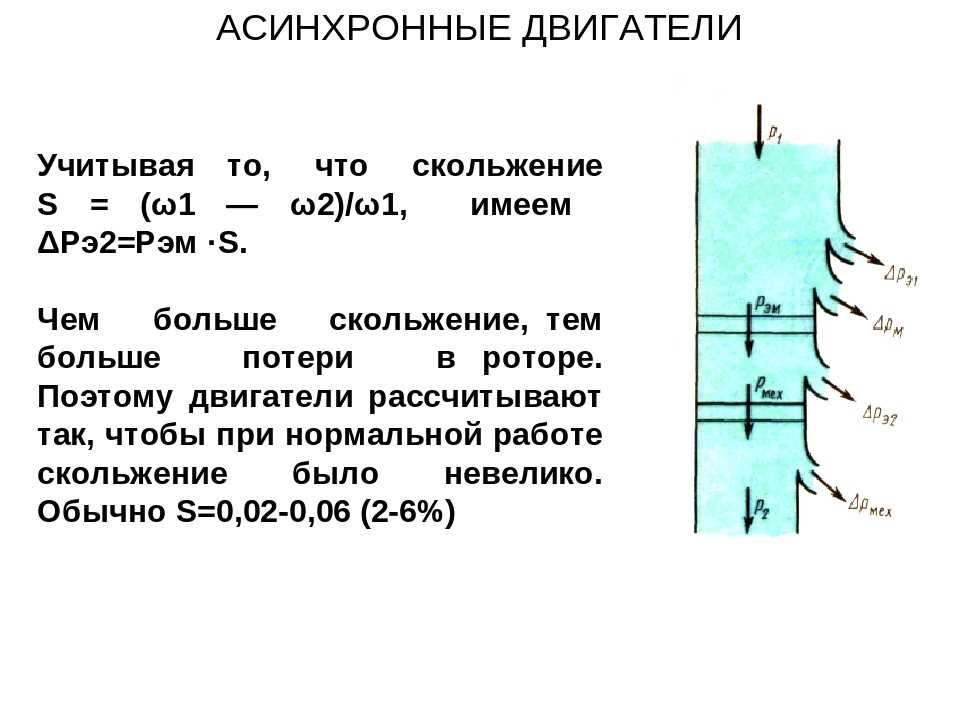
Холостой ход асинхронного двигателя подразумевает отсутствие на валу нагрузки в виде рабочего органа или редуктора. В режиме холостого хода скольжение составляет
s = ( n 1 − n 1 ) / n 1 = 0 {displaystyle s=(n_{1}-n_{1})/n_{1}=0} .
В режиме холостого хода ротор вращается с частотой лишь немного меньшей синхронной частоты вращения n 1 {displaystyle n_{1}} и скольжение весьма мало отличается от нуля.
Следует заметить, что так же существует режим идеального холостого хода
, при котором n = n 1 {displaystyle n=n_{1}} , что практически реализовать невозможно, даже если учесть отсутствие силы трения в подшипниках. Сам принцип работы двигателя подразумевает отставание ротора от вращающегося магнитного поля статора. При s = 0 {displaystyle s=0} поле статора не пересекает обмотки ротора и не может индуцировать в нём ток, а значит не создаётся магнитное поле ротора
СОПРОТИВЛЕНИЯ В ОБМОТКЕ РОТОРА
Как и в трансформаторе, часть потока статора замыкается по путям рассеяния, т. е. вокруг проводов статора, не заходя в ротор (рис. 10-19). Известно, что эти потоки обусловливают реактивное (индуктивное) сопротивление обмотки x1.Такие же потоки рассеяния существуют и вокруг проводов обмотки ротора, когда в ней протекает ток. Ими обусловлено реактивное сопротивление ротора x2.
При неподвижном роторе
При вращающемся роторе
Отсюда следует, что реактивное сопротивление ротора непрерывно и сильно меняется при изменении режима работы двигателя от величины x2s= х2• 1 = х2при неподвижном роторе до величины x2s = х2• 0 = 0, если бы ротор вращался синхронно.
В двигателях нормального исполнения изменением активного сопротивления ротора при изменении частоты от 50 гц до 0 можно пренебречь и считать r2= const.
Реальные измерения тока
Как я говорил выше, по моему мнению лучший способ “увидеть” пусковой ток – использовать активный (резистивный) шунт, и смотреть на нём напряжение осциллографом.
Я использовать вот такой шунт:

Шунт для измерения пускового тока при помощи осциллографа
Подопытный – мотор-редуктор, который через цепную передачу крутит вертикальный шнек:

Мотор-редуктор, на котором измеряем пусковой ток
Шнек на момент пуска был полным, поэтому его рабочий ток (7,7 А, измерено клещами) был почти равен номинальному (8,9 А, видно на шильдике).
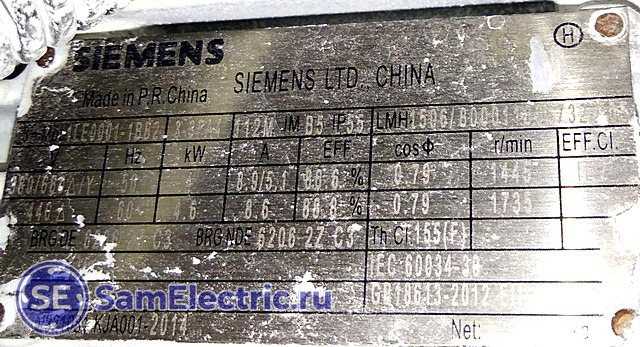
Шильдик двигателя вертикального шнека
Ситуация по пусковому току видна на осциллографе:
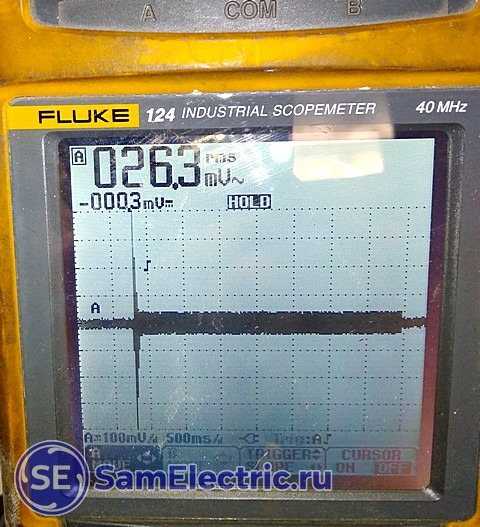
Осциллограмма пускового тока 500 мс/дел
Приблизим интересующий момент, ускорив развертку до 100 мс/дел:
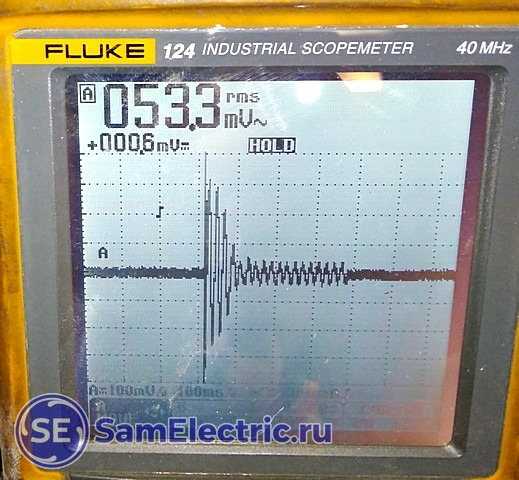
Осциллограмма пускового тока 100 мс/дел
Тут уже легко увидеть синус питающего тока и оценить коэффициент кратности пускового тока Кп, который примерно равен 4.
Ещё приблизим момент истины (до 50 мс/дел):
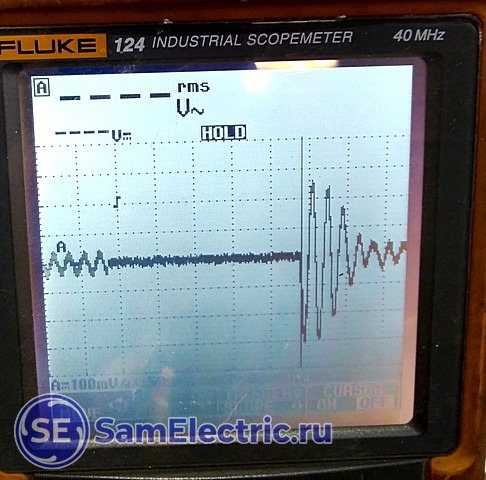
Момент пуска двигателя – ток пуска
Тут уже видны хорошо и переходные процессы, обусловленные индуктивностью и ЭДС самоиндукции обмоток двигателя. Этот импульс, длительность которого гораздо меньше периода сети 20 мс, даёт хорошую помеху с широким спектром в питающую сеть и радиоэфир.
5.4. МАГНИТНЫЕ ПОЛЯ И ЭДС АСИНХРОННОГО ДВИГАТЕЛЯ
При подключении обмотки
статора к сети возникают токи I1, создающие вращающийся магнитный
поток Ф. Большая часть магнитного потока сцепляется с обмотками ротора и статора.
Это будет основной поток обмотки статора. Некоторая часть магнитного потока
рассеивается в пространстве. Назовем его потоком рассеяния Фрс. Он
cцепляется только с витками собственной обмотки.
Основной магнитный поток
асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора
со скоростью n1 и обмотку ротора со скоростью n2, наводя
в них основные ЭДС:
;
где W1k1 и W2k2 — произведения чисел витков на обмоточные коэффициенты;
Е2s=Е2S.
Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2,
которые, как в трансформаторе, могут быть выражены через соответствующие токи
I1 и I2 и индуктивные сопротивления х1 и х2s.
;
где х1 и х2s
— индуктивные сопротивления рассеяния обмоток статора и ротора.
Помимо названных выше ЭДС, в обмотках статора и ротора имеют место активные падения напряжения, которые
компенсируются соответствующими ЭДС Er1 и Еr2.
Как снизить вред от пускового тока?
Если изменить схему питания двигателя невозможно (например, сосед по даче каждые пол часа запускает токарный станок, а никакие “методы воздействия” не воздействуют), то можно применить различные методы минимизации вреда от пусковых токов. Например:
- На важные потребители или на весь дом установить инверторный ИБП (UPS), который будет держать напряжение в норме при любом раскладе. Самый дорогой, но действенный способ.
- Поставить стабилизатор напряжения. Но учтите, что не все стабилизаторы одинаково полезны. Иногда они могут не справляться, а иногда – даже усугублять ситуацию. Подробнее – по приведенной ссылке.
- Если питание – однофазное, то можно попробовать переключиться с “плохой” фазы на “хорошую”. Иногда этот способ так же эффективен, как использование телепорта вместо автобуса “Таганрог-Москва”.
Но напоминаю, что мы тут занимаемся не устранением последствий, а предотвращением проблем, поэтому погнали дальше.
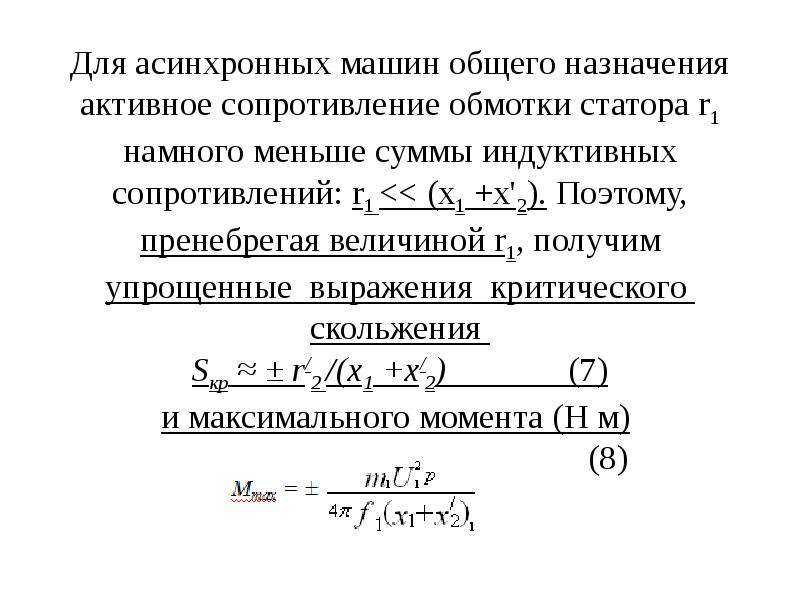
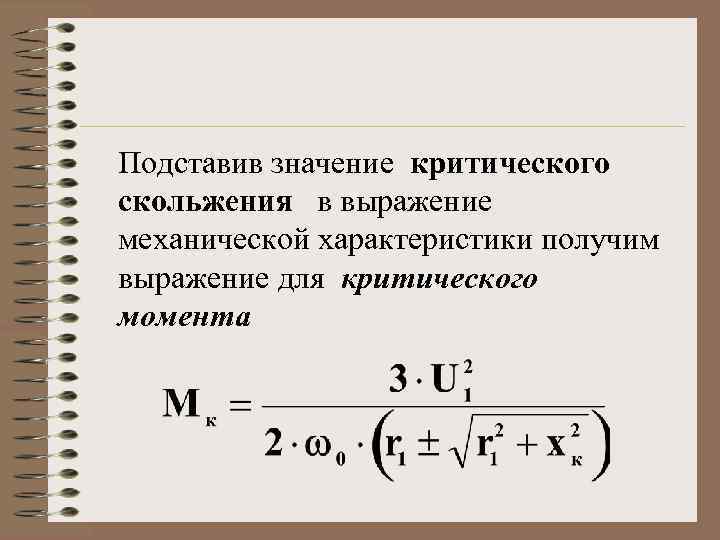
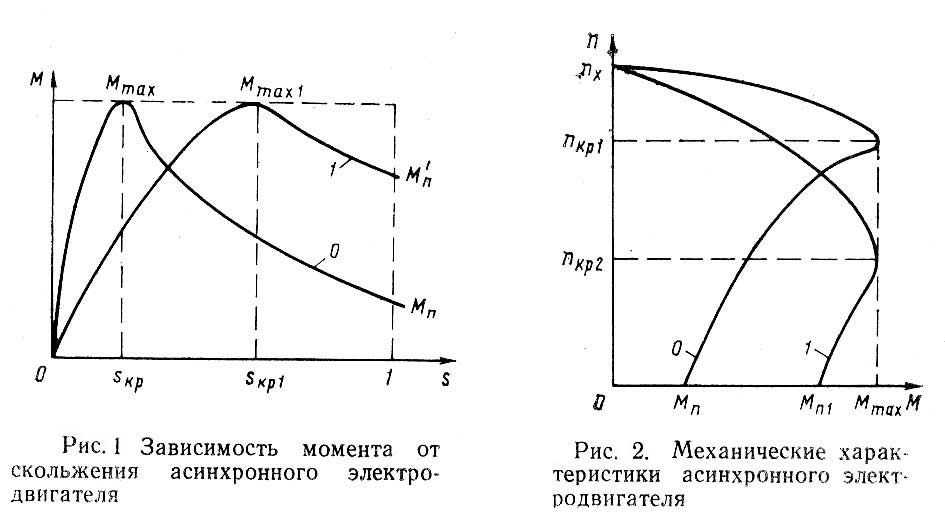
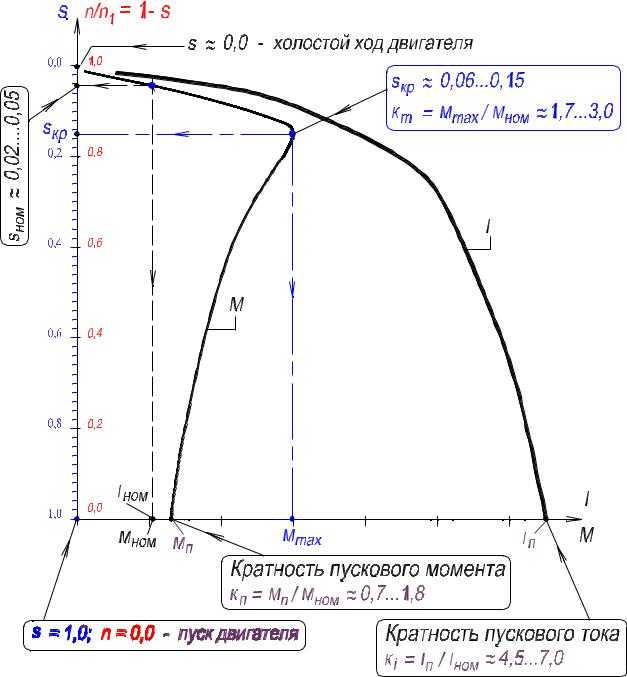
Критическое скольжение [ править | править код ]
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Поэтому при малых нагрузках можно считать, что момент пропорционален скольжению. Но при росте скольжения возрастают активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим.
Расчет мощности двигателя: методики и необходимые формулы
Мощность движка — это энергия, которая образуется внутри ДВС во время его работы. Этот показатель является ключевым для любого автомобиля, а при выборе машины на него ориентируется многие автомобилисты. Определить его можно различными способами. Перечислим основные методики:
Главной единицей измерения мощности являются ватты, однако иногда этот показатель выражают с помощью лошадиных сил. Между этими единицами измерения есть простая зависимость, поэтому при необходимости, лошадиные силы, можно легко преобразовать в ватты (и наоборот).
В нашей статье, мы рассмотрим основные формулы определения мощности, а также узнаем, как перевести лошадиные силы в ватты.
5.14. ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Статор однофазного двигателя имеет однофазную обмотку, которая занимает 2/3 общего числа пазов статора. Ротор – коротко-замкнутый.
При подключении к сети однофазная статорная обмотка создает не вращающийся, а пульсирующий магнитный поток с амплитудой Ф. Этот поток может быть искусственно разложен на два вращающихся потока ФI и ФII, каждый из которых равен Ф/2. Обозначим ФI прямым потоком, а ФII – обратным. Частота вращения каждого потока – n1I=n1II=n1.
Предположим, что ротор двигателя уже вращается в направлении прямого потока. Тогда скольжение двигателя относительно прямого потока ФI равно:
а относительно обратного потока:
Потоки ФI и ФII наводят в обмотке ротора ЭДС E2I и E2II, которые создают токи I2I и I2II. Известно, что частота тока в обмотке ротора пропорциональна скольжению f2=Sf1. Т.к. SII>SI, то ток, наведенный обратным полем, имеет частоту намного больше частоты, наведенной в обмотке ротора прямым полем f2II>f2I.
Пусть n1=1500 об/мин, n2=1450 об/мин, f1=50 Гц, тогда:
Нам также известно, что индуктивное сопротивление роторной обмотки x2 зависит от частоты f2:
Вращающие моменты двигателя пропорциональны магнитным потокам статора и токам в обмотке ротора. (М
Исходя из значений токов I2I и I2II и учитывая, что ФI=ФIIможно записать:
Следовательно, если ротор двигателя уже вращается в сторону прямого потока, то он будет продолжать вращаться в этом направлении. Тормозящее воздействие МII не будет оказывать заметного влияния на работу двигателя.
Вспомним, что мы условно предполагали вращение ротора в сторону прямого потока ФI. А если бы он вращался вначале в сторону обратного потока ФII?
Тогда, проведя аналогичные рассуждения, можно заключить, что ротор будет устойчиво вращаться в сторону обратного потока. Рассмотрим механическую характеристику однофазного двигателя (рис. 5.14.2).
![§ 108. вращающий момент асинхронного двигателя [1970 кузнецов м.и. - основы электротехники]](https://oksimetr.ru/wp-content/uploads/a/2/d/a2d2fff90bea2b6151b103f723f1d30b.jpeg)
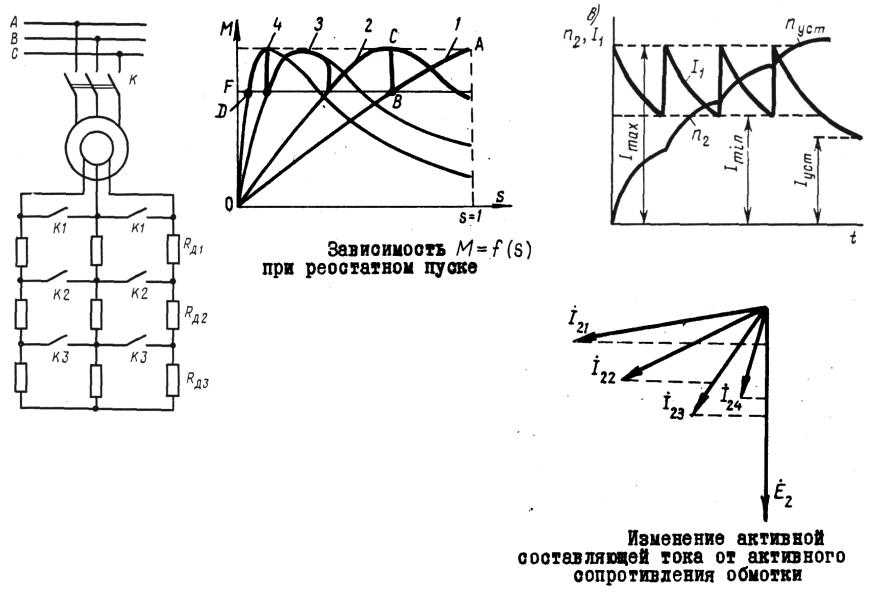
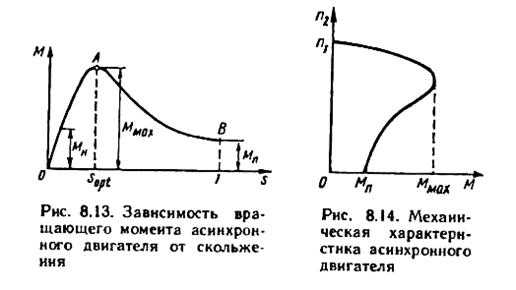
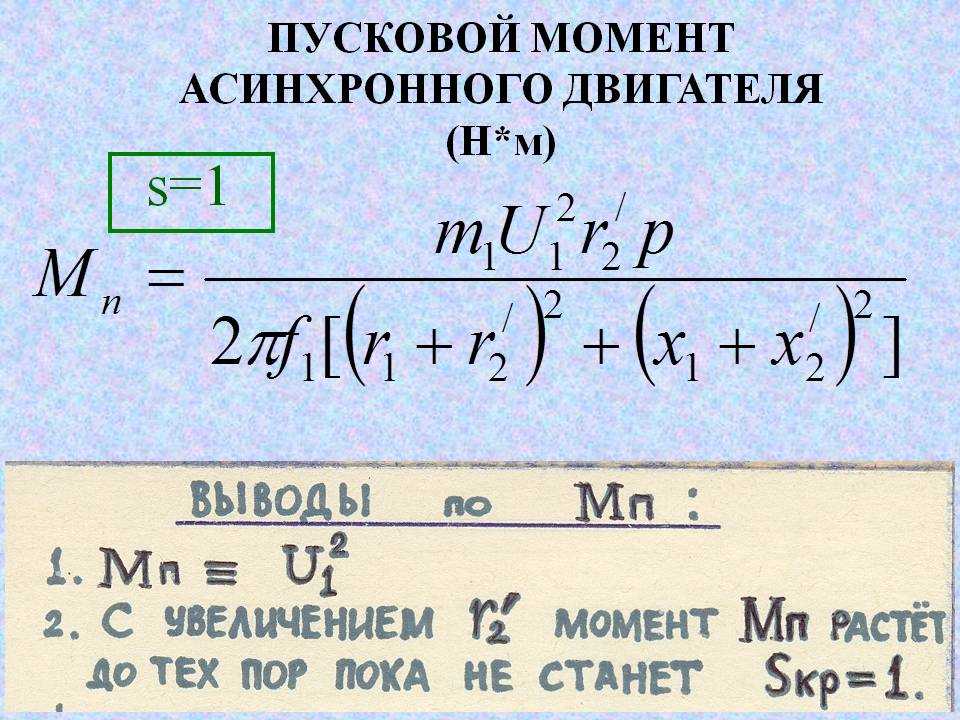
Из характеристики М=f(S) видно, что при пуске, когда S=1, пусковой момент Мп=О. Двигатель при включении его в сеть сам не начнет вращаться. Необходим его сдвиг в ту или иную сторону.
Если сдвинуть точку Мпвлево от S=1, то момент будет положительным, если вправо – отрицательным.
Другими словами, направление устойчивого вращения ротора двигателя будет зависеть от направления первоначального импульса.
Проведенный анализ показал, что однофазный двигатель нуждается в принудительном пуске.
Пусковые устройства могут быть механическими (пуск от руки) и электрическими.
Первый способ пуска практически выжил себя, и на его смену пришел второй – электрический.
Для создания необходимого пускового момента однофазный двигатель снабжается дополнительной пусковой обмоткой. Эта обмотка размещается в оставшейся незаполненной 1/3 пазов.
Однофазный двигатель, таким образом, превратился в двухфазный. Двухфазный двигатель обладает вращающимся магнитным полем, если выполнены два обязательных условия.
Первое условие состоит в пространственном сдвиге рабочей и пусковой обмоток на 90 эл. градусов. Такое условие, легко реализуется на заводе-изготовителе.
Второе обязательное условие диктуется сдвигом по фазе тока в пусковой обмотке на 90° относительно тока в рабочей обмотке. Выполнение этого условия связано с включением в пусковую обмотку фазосдвигающего элемента, например, конденсатора (рис. 5.14.3).
После того как ротор двигателя придет во вращение, пусковую обмотку ПО отключают. Делается это с помощью выключателя В. Иногда в бытовой технике отключение пусковой обмотки производится автоматически по ходу разгона двигателя.
5.2. ПРИНЦИП ОБРАЗОВАНИЯ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ МАШИНЫ
На статоре трехфазного
двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению
друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты
друг от друга во времени на 1/3 периода (рис. 5.2.1.).
Используя график изменения
трехфазного тока, проставим на нем несколько отметок времени; tl,
t2, t3,…tn. Наиболее удобными будут отметки,
когда один из графиков пересекает ось времени.
Теперь рассмотрим электромагнитное
состояние обмоток статора в каждые из принятых, моментов времени.
Рассмотрим вначале точку
t1. Ток в фазе А равен нулю, в фазе С он будет положительным — (+)
, а в фазе В — отрицательным (·) (рис. 5.2.2, а).
Поскольку каждая фазная обмотка имеет замкнутую форму, то конец фазной обмотки
В-У будет иметь противоположный знак, т.е. У — (+), а конец Z обмотки C-Z — (·).
Известно, что вокруг проводника
с током всегда образуется магнитное поле. Направление его определяется правилом
правоходового винта («буравчика»).
Проведем силовую магнитную
линию вокруг проводников С и У и, соответственно, В и Z (см. штриховые линии
на рис. 5.2.2 a).
Рассмотрим теперь момент
времени t2. В это время тока в фазе В не будет. В проводнике А фазы
А-Х он будет иметь знак (+), а в проводнике С фазы C-Z он будет иметь знак (·).
Теперь проставим знаки:
в проводнике Х — (·), а в проводнике Z — (+).
Проведем силовые линии
магнитного поля в момент времени t2 (рис. 5.2.2,б). Заметим при этом,
что вектор F совершил поворот.
Аналогичным образом проведем
анализ электромагнитного состояния в фазных обмотках статора в момент времени
t3,…tn (рис. 5.2.2, б, в, г, д).
Из рисунков 5.2.2 наглядно видно, что магнитное поле в обмотках и его поток Ф
совершают круговое вращение.
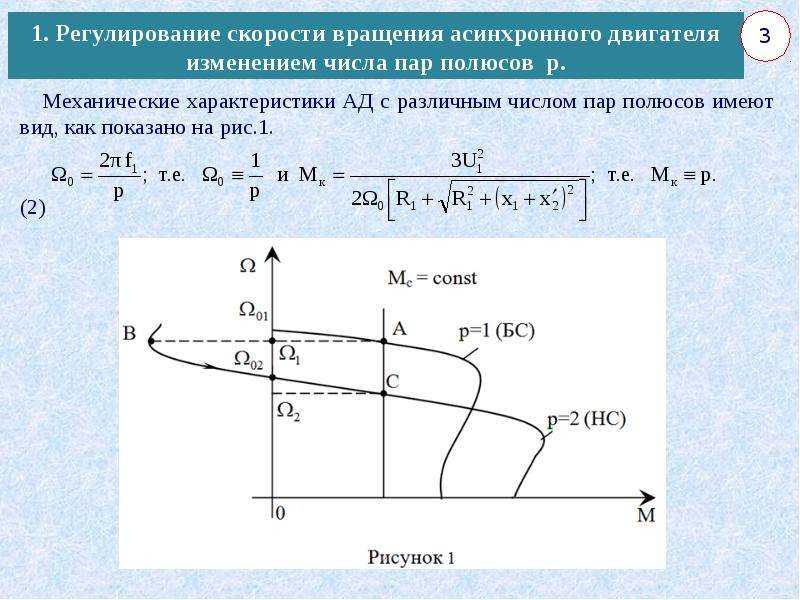
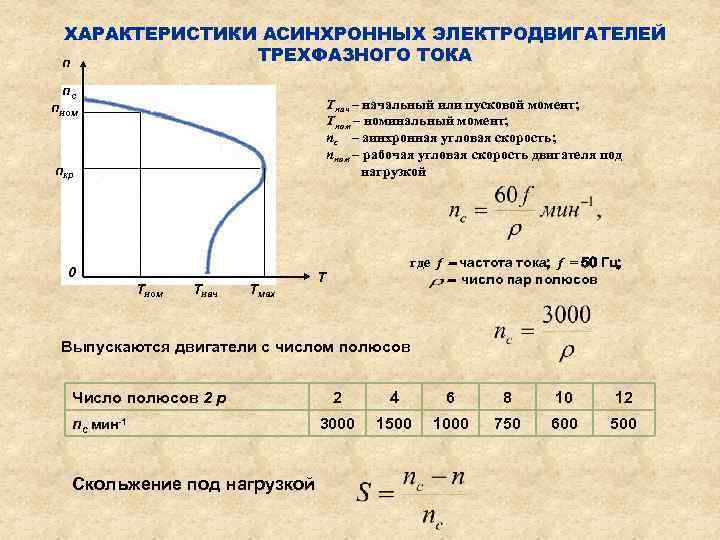
Частота вращения магнитного поля статора определяется следующей формулой:
где f — частота тока питающей сети, Гц; p — число пар полюсов.
Если принять f=50 Гц, то
для различных чисел пар полюсов (р=1, 2, 3, 4, )
n1=3000, 1500, 1000, 750, об/мин.
Генераторный режим[править | править код]
Если обмотку статора включить в сеть, а ротор посредством приводного двигателя вращать в направлении вращения магнитного поля с частотой n>n1n_>, то направление движения ротора относительно поля статора изменится на обратное (по сравнению с двигательным режимом), так как ротор будет обгонять поле статора. При этом скольжение станет отрицательным, а ЭДС, наведенная в обмотке ротора изменит свое направление. Таким образом, в генераторном режиме скольжение может изменяться в диапазоне −∞ 5.16. ОДНОФАЗНЫЙ ДВИГАТЕЛЬ С ЯВНО ВЫРАЖЕННЫМИ ПОЛЮСАМИ
Для создания вращающего момента в однофазных асинхронных двигателях иногда применяют конструкцию с явно выраженными полюсами и однофазной обмоткой. Полюса 1 (рис. 5.16.1) имеют расщепленную конструкцию, причем на одну из половинок каждого полюса надет короткозамкнутый виток в виде медного кольца 2. Ротор также короткозамкнутый. При подключении обмотки статора к сети под действием создаваемого ею пульсирующего магнитного потока в витке возникает ток, который препятствует нарастанию потока в этой части полюса.
В результате потоки в обеих частях каждого полюса оказываются сдвинуты по фазе относительно друг друга, что в свою очередь приводит к образованию в двигателе вращающего магнитного поля. Однофазные двигатели применяют в некоторых типах вентиляторов, электропроигрывателях и т.д.
5.18.4 Электромагнитная асинхронная муфта
Электромагнитная асинхронная муфта (рис. 5.18.4.1)
устроена по принципу асинхронного двигателя и служит для соединения двух частей
вала. На ведущей части вала 1 помещается полюсная система 2, представляющая
собой систему явно выраженных полюсов с катушками возбуждения. Постоянный ток
в катушке возбуждения подводится через контактные кольца 4. Ведомая часть муфты
3 исполняется по типу роторной обмотки двигателя.
Принцип работы муфты аналогичен работе асинхронного
двигателя, только вращающийся магнитный поток здесь создается механическим вращением
полюсной системы. Вращающий момент от ведущей части вала к ведомой передается
электромагнитным путем. Разъединение муфты производится отключением тока возбуждения.
Управление электрическим током позволяет осуществлять
дистанционное управление муфтой (плавно сцеплять и расщеплять ее). Поэтому ее
применяют в автоматике и телемеханике.
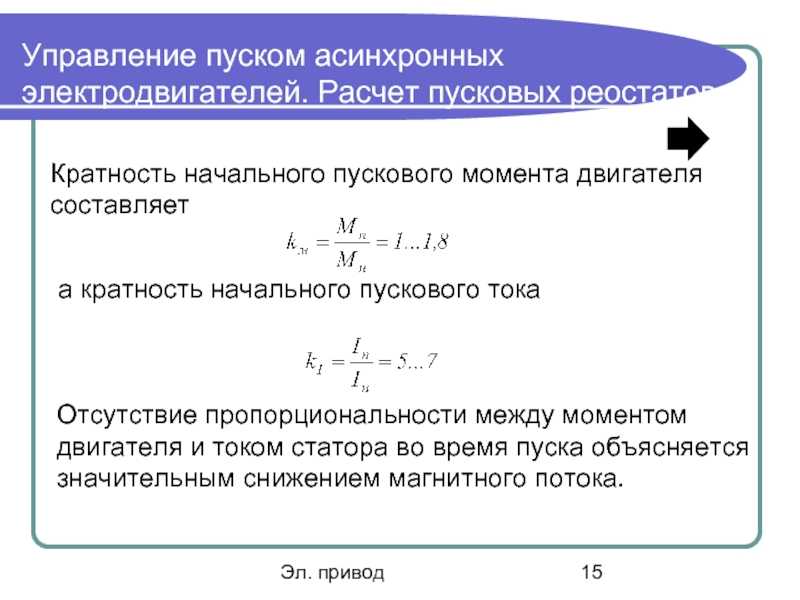
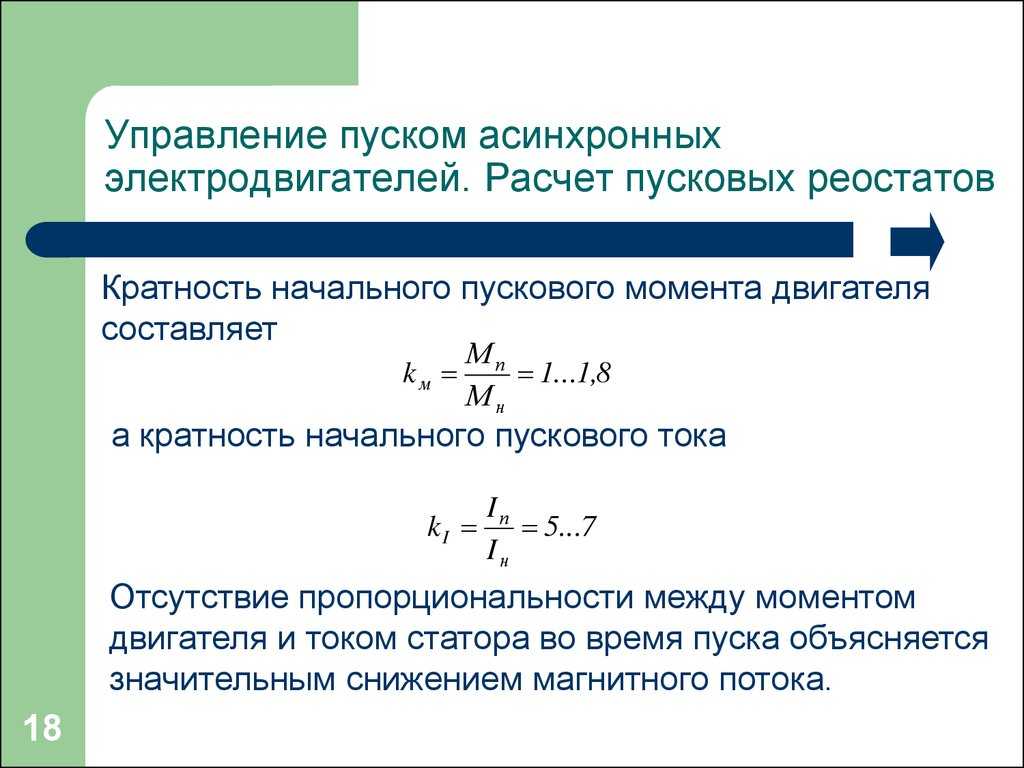
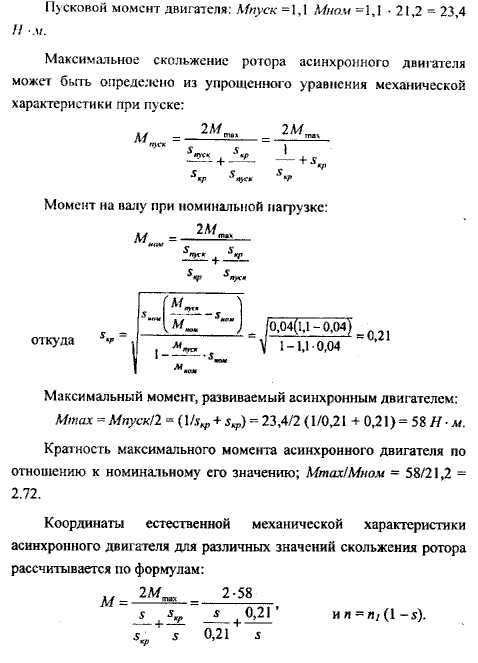
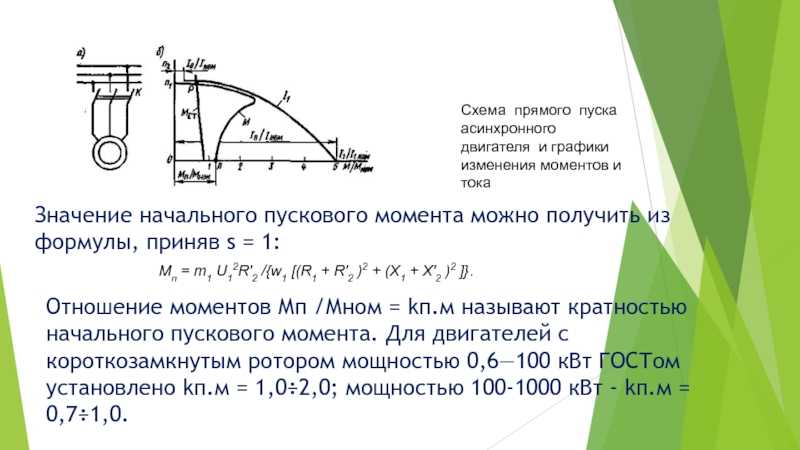
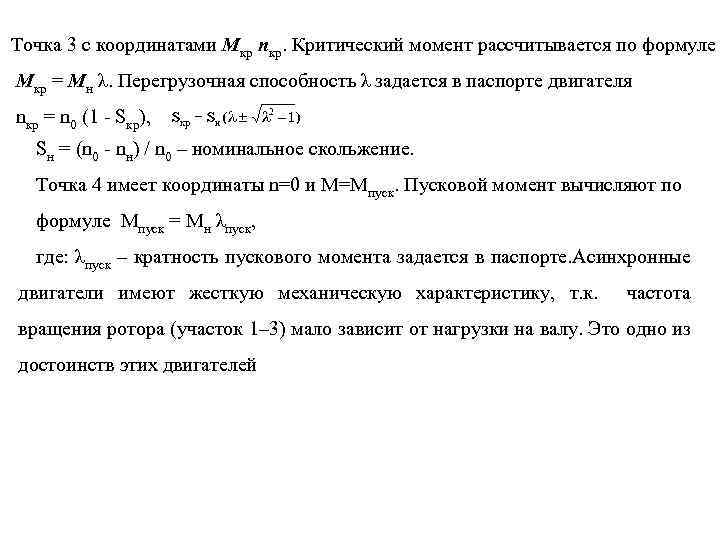
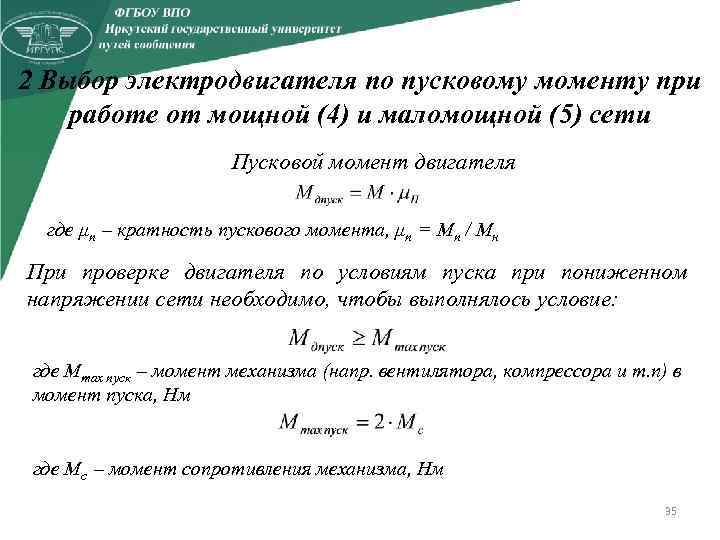
Расчет пускового момента
Пусковой момент, который зависит от номинального усилия на валу и кратности пускового момента, можно вычислить по формуле:
Мпуск=Мн*Кпуск.,
где:
- Мн – номинальное усилие на валу электродвигателя;
- Кпуск.– кратность пусков, паспортная величина, которая принимает значения от 1,5 до 6.
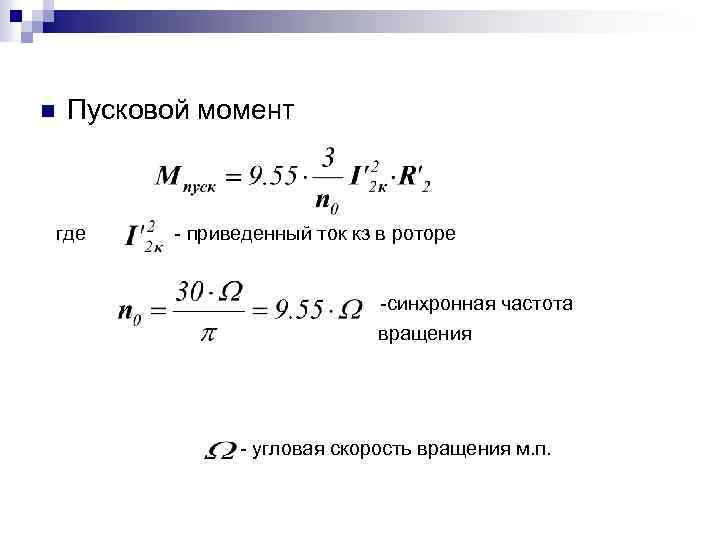
На практике применяют другую формулу:
Мпуск=9,55*Р2* 1000/F1,
Необходимые данные указываются на шильдике двигателя или в паспорте, где F1 – номинальные обороты.
Р2 равна номинальной мощности в кВт, является расчетной величиной.
Для того, чтобы узнать значение Р2, следует воспользоваться формулой, в которой учитываются пусковой ток, напряжение сети, скольжение. Эти данные можно узнать в паспорте, справочнике или на сайте завода-изготовителя.
Р2=(1,732*U*Iпуск)/S1*1000.
Как определить мощность электродвигателя
Итак, перейдем к вариантам действий. А именно, для определения мощности электродвигателя:
- по току. Подключаем двигатель к сети электротока с определенной нагрузкой (напряжением). Поочередно подключая в нашу последовательность в каждую обвивку амперметр, измеряем работающий электрический ток движка в амперах. Определяем количество полученных как результат замеров токов. Сумму умножаем на показатель напряжения, и как последствие — употребляемая мощь электрического движка в ваттах;
- по размерам. Определяем эндоментрический калибр сердечника неподвижной части, его длину совместно с каналами вентиляции в сантиметрах. Узнаем повторность изменяющегося тока в сети, к которой подключен определенный электродвигатель и одновременную частоту оборота вала. Что бы определить неизменную разделения, воспроизводим калибр сердечника на одновременную повторность вала и умножаем на 3,14 и в том же порядке делим на 120 (3,14 D n/(120 f)) и повторяемость сети. Таким образом, узнали разделение прибора, характеризуемое как полярное. Находим сколько полюсов, умножая часто встречаемую повторность электричества сети на 60, и делим полученное количество на повторность оборота вала. Снятые значения умножаем на два. На основе решения смотрим в табличке «определения зависимости неизменной движка С от количества полюсов» находим наше число константной. Умножаем полученную неизменную на калибр сердечника в квадрате, его одновременную частоту оборота и длину. Полученное число умножаем на 10^(-6) (P = C D² l n 10^(-6)). Одержали значение электрической мощи в киловаттах;
- мощности, которую выдает электродвигатель. Находим скорость оборота вала исследуемого прибора тахометром во вращениях за секунду. После берем динамометр и определяем тяговое усилие электродвигателя. И как результат для определения мощности в ваттах умножаем частоту оборотов на 6,28, также на силу и радиус вала, последние измеряем линейкой.
Определить мощность электродвигателя, у которого отсутствует или не читается шильдик, можно путем электрических измерений, или используя таблицы габаритов электромоторов. Как правило, это значение требуется для правильного подбора конденсаторов, при включении трехфазного электродвигателя в однофазную сеть. Определяя мощность электромотора по габаритам, придется также определить частоту вращения вала.
5.15. ДВУХФАЗНЫЙ КОНДЕНСАТОРНЫЙ ДВИГАТЕЛЬ
Двухфазный конденсаторный
двигатель имеет на статоре две обмотки ОВ и ОУ, рассчитанные на длительное протекание
тока. Обмотки располагаются в пространстве под углом 90 эл. градусов), а последовательно
одной из них включают конденсатор С.
Двухфазный конденсаторный
двигатель переменного тока обладает вращающимся магнитным полем (правда, не
круговым, а эллиптическим). Поэтому он не нуждается в специальных пусковых устройствах
(рис. 5.15 1.).
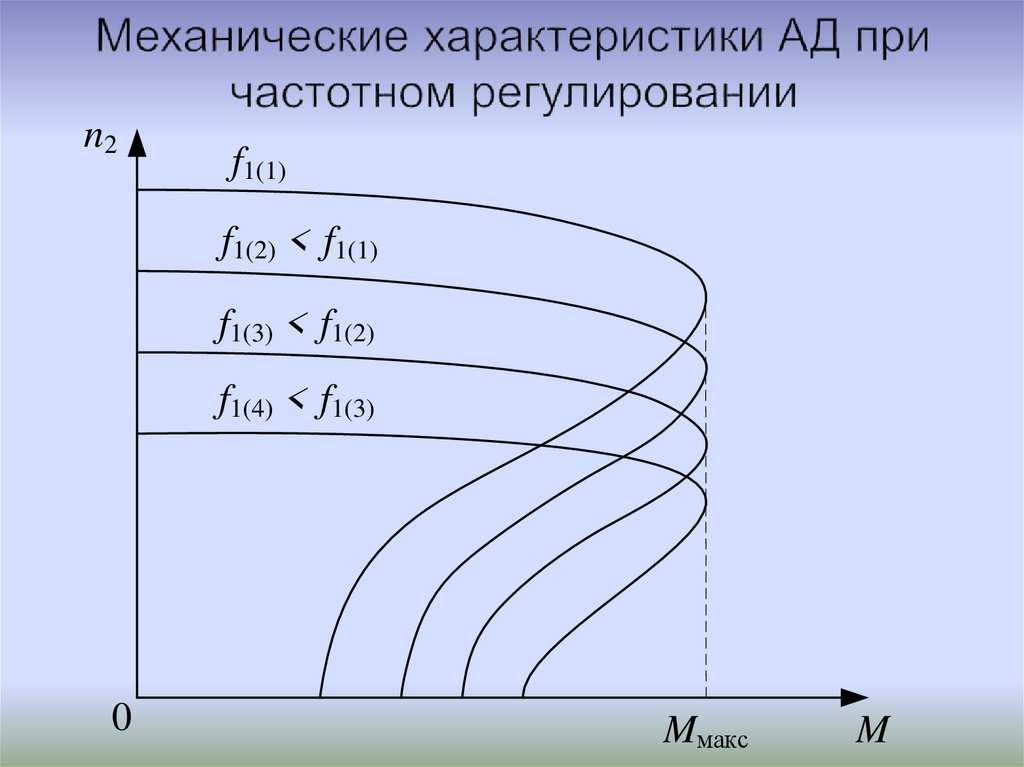
Двухфазный асинхронный
двигатель, в отличие от трехфазного, имеет возможность плавного регулирования
частоты вращения ротора.
Делается это одним из двух
способов: амплитудным (изменением напряжения Uy) и фазным (изменением емкости
конденсатора С).
Двухфазные двигатели получили
широкое распространение в бытовых приборах и лабораторной практике.
В отличие от рассмотренных
выше типов двигателей, интересен двигатель с полым ротором. Он имеет два статора,
между которыми располагается ротор (рис. 5.15.2.).

Наружный статор 1 имеет
обычно конструкцию с двухфазной обмоткой 4. Фазные обмотки сдвинуты в пространстве
относительно друг друга на 90°. Внутренний статор 3 представляет
собой пакет электротехнической стали без обмотки. В воздушном зазоре между
статорами помещен ротор двигателя 2, который не имеет обмотки и выполнен в виде
стакана с тонкими стенками из немагнитного материала (алюминия). Посредством
втулки 6 ротор укреплен на валу двигателя 5. Такая конструкция обеспечивает
ему незначительную инерцию и делает двигатель чувствительным даже к небольшим
импульсам (сигналам) тока. Этому также способствует наличие второго статора,
который уменьшает сопротивление магнитной цепи. Одна из фаз обмоток статора
включается на напряжение сети Uс, другая является управляющей обмоткой.
Когда напряжение на ней отсутствует, ротор неподвижен. С появлением управляющего
сигнала Uу достаточной величины статор создает двухфазное вращающееся
поле, и двигатель развивает вращающий момент, величина которого пропорциональна
Uc.
Работа этого двигателя
основана на взаимодействии магнитного поля статора с вихревыми токами, наведенными
на поверхность полого ротора.
Машины с полым ротором
весьма чувствительны к изменениям напряжения сигнала и его продолжительности,
что дает возможность применять их в качестве исполнительных двигателей.
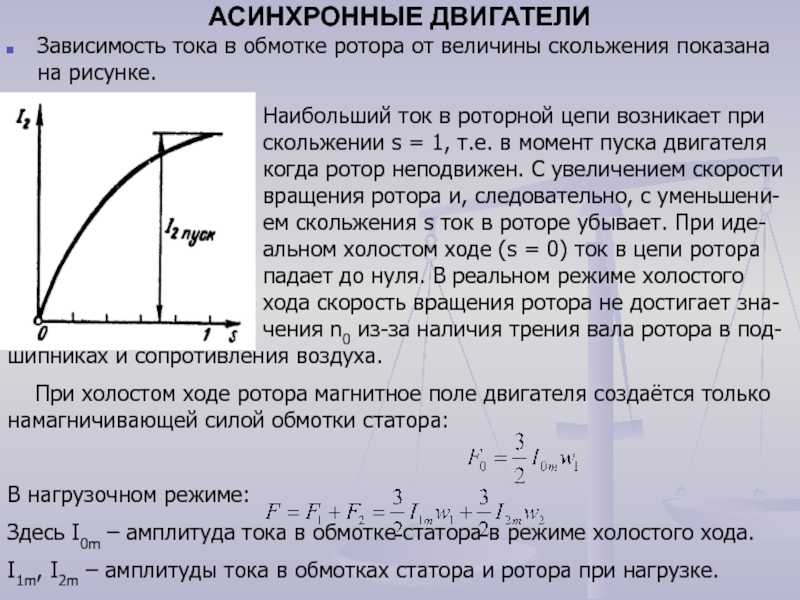
ТОК В ОБМОТКЕ РОТОРА
Из сказанного выше об изменении э. д. с. и реактивного сопротивления обмотки ротора можно заключить, что ток в роторе I2 = E2s/√(r22 + x22s)
тоже меняется при изменении скорости вращения. Пусковой ток I2п должен быть велик и отставать от э. д. с. на большой угол Ψ2, так как Е2велика, а реактивное сопротивление обмотки х2 обычно в 8—10 раз больше активного r2
При вращении ротора уменьшаются E2sи x2s. Вследствие этого уменьшаются ток I2и угол Ψ2
Указанное обстоятельство очень важно, так как в этом существенная разница между трансформатором и асинхронным двигателем
Статья на тему Работа асинхронного двигателя
Критический момент — двигатель
Это допущение справедливо при условии, что максимальное значение пускового момента на 15 — 20 % меньше критического момента двигателя.
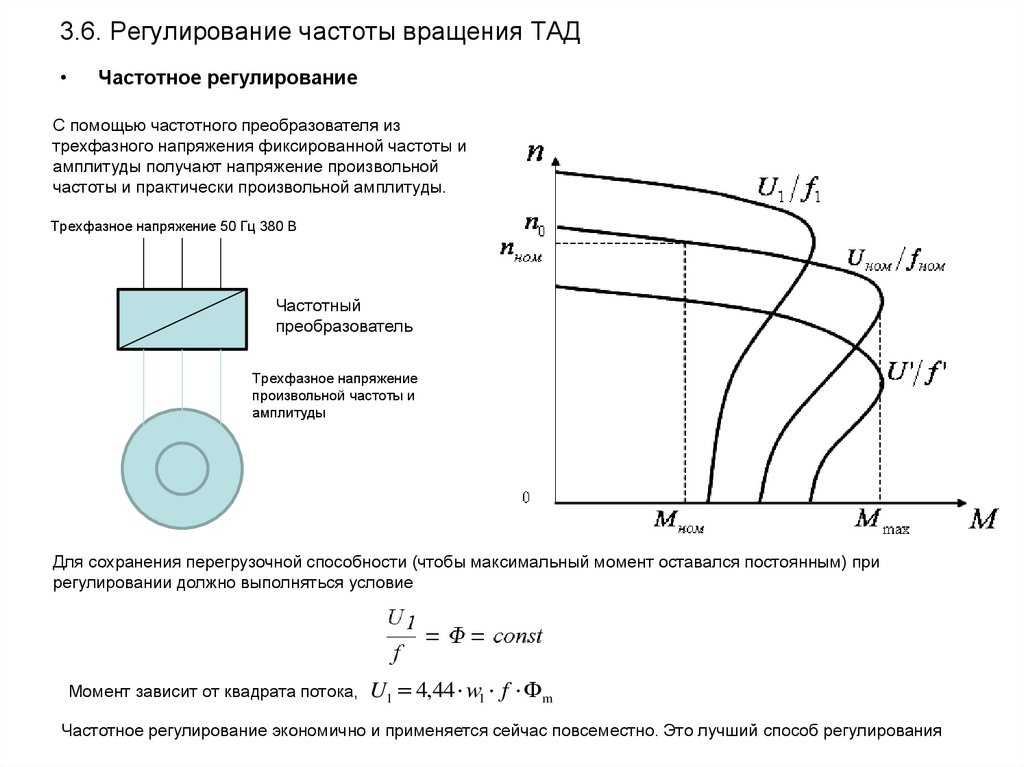
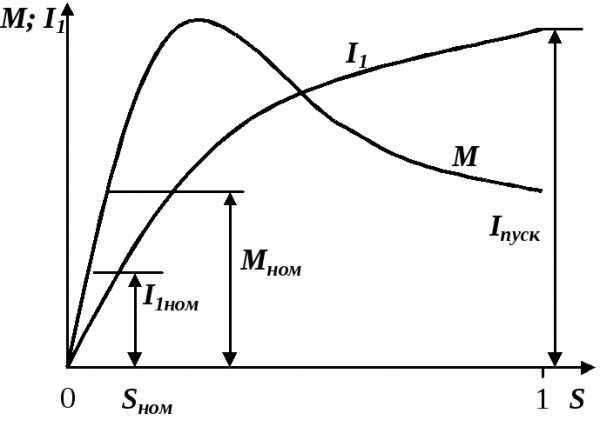
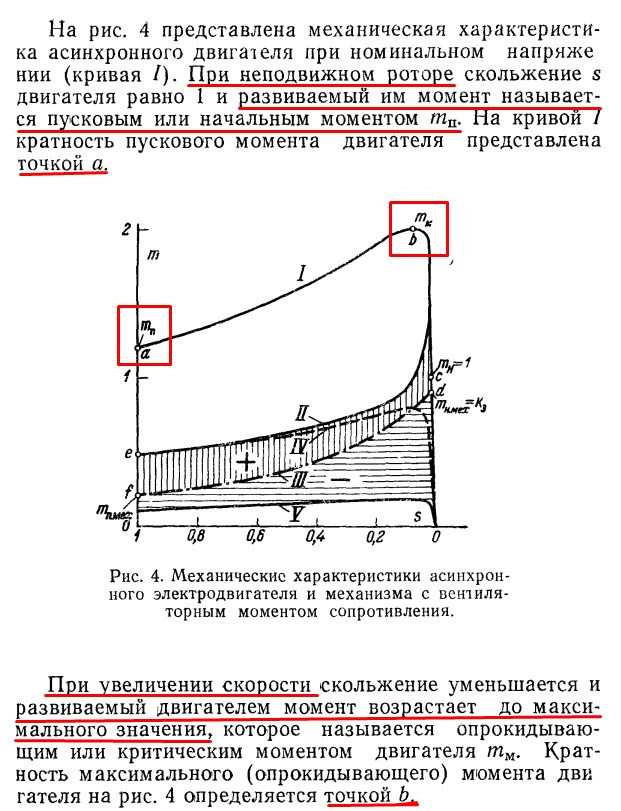
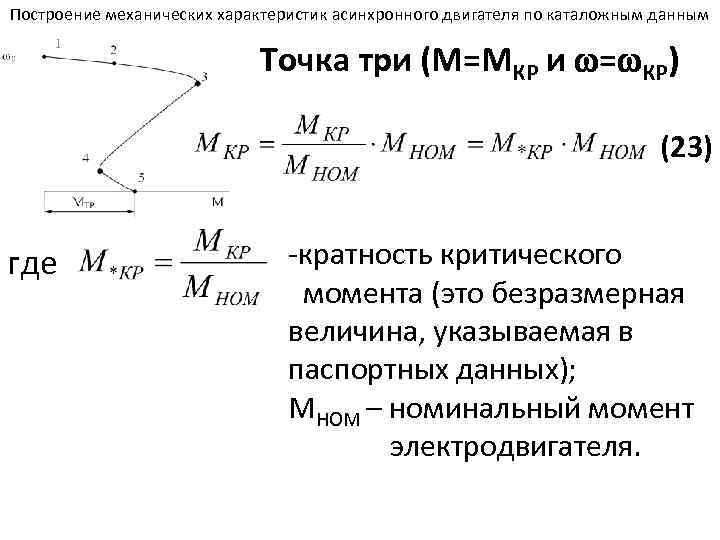
При увеличении скорости скольжение уменьшается и развиваемый двигателем момент возрастает до максимального значения, которое называется опрокидывающим или критическим моментом двигателя тм.
Существенно отметить, что при введении дополнительного активного сопротивления в роторную цепь скорость двигателя изменяется в относительно широких пределах, а критический момент двигателя при регулировании остается постоянным. Следовательно, перегрузочная способность двигателя при этом не уменьшается.
|
Механические характеристики двигателя и механизма. |
При увеличении скорости вращения скольжение двигателя уменьшается, момент возрастает и в точке Ь достигает максимального значения, которое называется опрокидывающим или критическим моментом двигателя.
Динамические моменты в асинхронных двигателях, связанные с электромагнитными переходными процессами, сопровождающими режимы пуска и торможения, могут достигать больших значений, в несколько раз превышающих критические моменты двигателя, рассчитанные по статическим характеристикам.
|
К принципу регулирования скорости АД при несимметричном изменении напряжения.| Принципиальная ( а и эквивалентная ( б схемы системы импульсный регулятор напряжения г — ДПТ НВ.| Диаграмма изменения напряжения на якоре двигателя и токов якоря потребляемого из сети и в шунтирующем якорь диоде. |
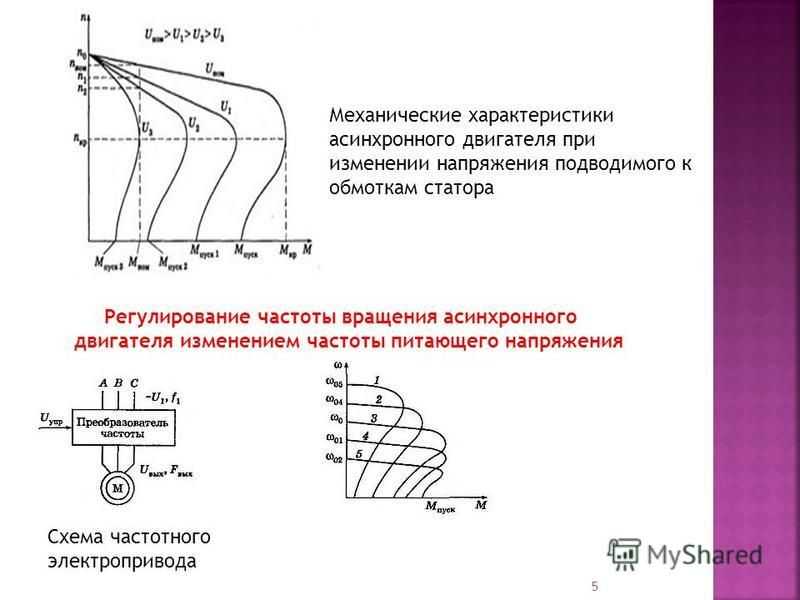
С увеличением а уменьшается критический момент двигателя и вместе с тем снижатеся модуль механических характеристик.
Асинхронный двигатель весьма чувствителен к колебаниям напряжения сети. Как следует из уравнения (III.10), критический момент двигателя ( а также и пусковой) пропорционален квадрату напряжения питания.
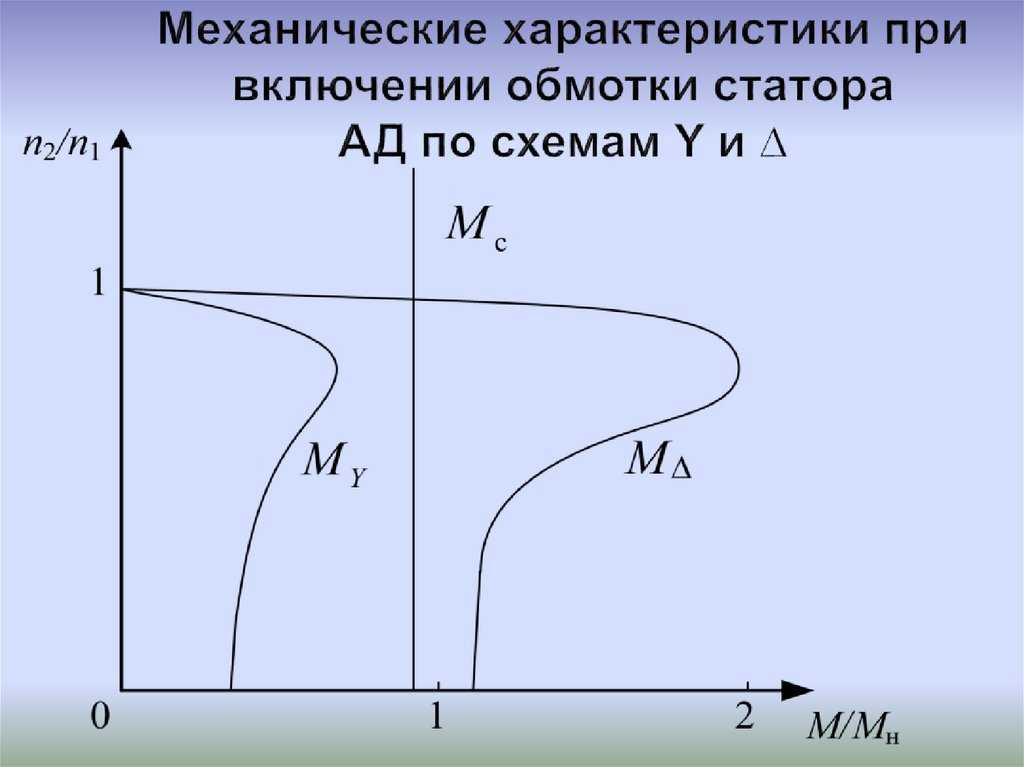
В том Случае, когда обмотка статора асинхронного двигателя выполняется таким образом, что при напряжении 380 в и полной нагрузке она должна быть соединена в треугольник, целесообразным является переключение на звезду при малых нагрузках, что приводит к снижению потребляемой реактивной мощности. Не следует забывать при этом, что критический момент двигателя снизится в 3 раза, так как напряжение, подведенное к обмотке фазы статора, снизится в / з раз. Указанное переключение применяется на ряде эскалаторов. Кроме повышения коэффициента мощности, оно обеспечивает также снижение момента двигателя при включении эскалатора на спуск пассажиров, что ограничивает величину ускорений всей системы электропривода.
В том случае, когда обмотка статора асинхронного двигателя выполняется таким образом, что при напряжении 380 в и полной нагрузке она должна быть соединена в треугольник, целесообразным является переключение на звезду при малых нагрузках, что приводит к снижению потребляемой реактивной мощности. Не следует забывать при этом, что критический момент двигателя снизится в 3 раза, так как напряжение, подведенное к обмотке фазы статора, снизится в V 3 раз. Указанное переключение применяется на ряде эскалаторов.
|
Включение дополнительных активных Сопротивлений в цепи статора ( а и ротора ( б асинхронного двигателя.| Механические характеристики при различных дополнительных активных сопротивлениях в статорной цепи. |
На рис. 11 представлены механические характеристики асинхронного двигателя, построенные для различных значений дополнительных активных сопротивлений ста-торной цепи. Из них видно, что с увеличением сопротивления критический момент двигателя уменьшается.
При to — wc3 динамические моменты, возникающие при любом малом отклонении скорости, направлены на уменьшение возникшего отклонения скорости и возвращают электропривод в точку устойчивого равновесия. Увеличение момента нагрузки вплоть до значения, соответствующего критическому моменту двигателя, приводит к слиянию точек устойчивого и неустойчивого равновесия в одну точку со сок со ( 1 — SK), для которой устойчивость зависит от направления отклонения.
Из формул ( 5) и ( 6) следует, что при неизменном скольжении ток ротора двигателя пропорционален напряжению, приложенному к статору, а момент двигателя пропорционален квадрату этого напряжения. Так как величина Критического скольжения не зависит от напряжения, критический момент двигателя пропорционален квадрату напряжения.
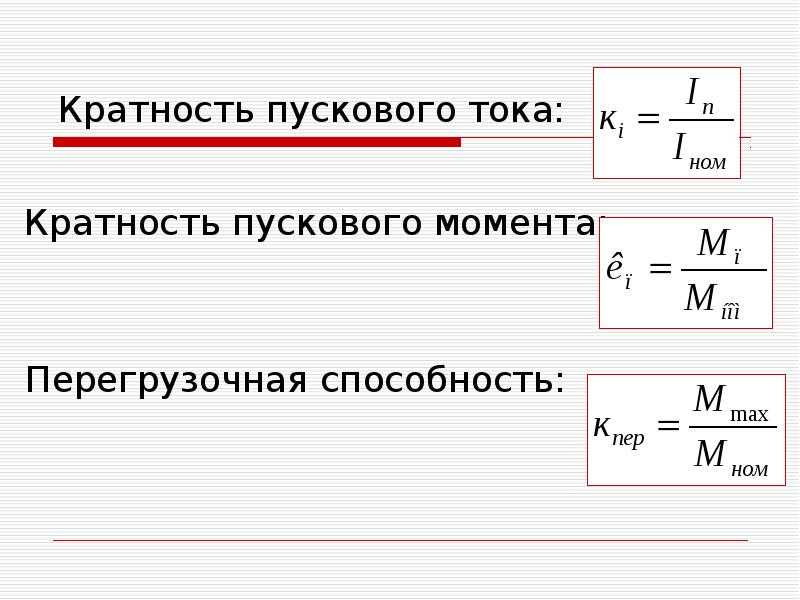
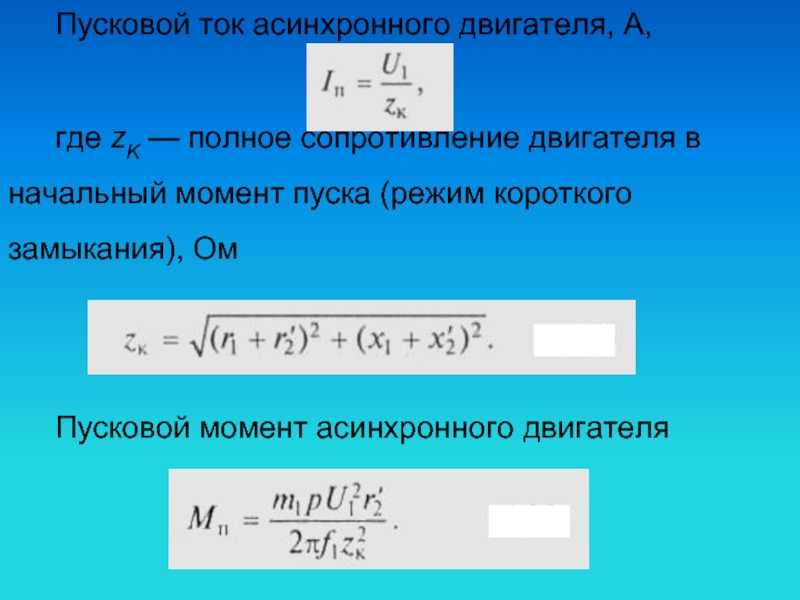
Как узнать пусковой ток?
Кратность пускового тока (отношение пускового тока к номинальному) найти в документации на двигатель бывает не так-то просто. Но его можно измерить (оценить, узнать) самому. Вот навскидку несколько способов:
- Первый способ (лучший) – использовать осциллограф. Взять шунт (например, резистор 0,1…0,5 Ом, чем меньше по сравнению с обмотками, тем лучше), и посмотреть на нём осциллограмму в момент пуска. Далее из максимального амплитудного значения определяем действующее напряжение (поделить на корень из 2), далее по закону Ома считаем пусковой ток. Можно ничего не умножать и не делить – просто измерить клещами ток в рабочем режиме, и умножить его на разницу токов на экране осциллографа. Способ хорош тем, что видно переходные процессы, вызванные ЭДС самоиндукции, мгновенные значения тока, длительность разгона. Кроме того, учитываются параметры питающей сети. Ещё плюс – пусковой ток измеряется реальный, на реальном двигателе и механизме.
- Второй способ измерения пускового тока – подать на двигатель пониженное (в 5-10 раз) напряжение рабочей частоты и измерить ток. Почему пониженное? Это необходимо для того, чтобы ротор можно было легко зафиксировать, не допуская перегрева. Измеренный ток пересчитать, получим пусковой. Достаточно измерить ток на одной фазе. По другим токи будут (обязаны быть) такими же. Этот способ используют при производстве и испытаниях двигателей. Именно этим способом производители получают табличные данные. Способ опирается на номинальный ток, в реальности (на реальном механизме) пусковой ток может быть другим!
- Измерить пусковой ток токоизмерительными клещами. Плюс этого способа – простота и оперативность. Клещи используют в большинстве случаев для проверки режимов работы двигателей. Минус – такие клещи достаточно инерционны, а нам нужно увидеть, что происходит за доли секунды. Но этот минус нивелируется, когда мы измеряем ток при пуске нагрузки с высоким моментом инерции (вентиляторы, насосы с массивными крыльчатками). Пуск длится более 10 сек, и на экране клещей всё видно.
- Трансформатор тока. Такой используется, например, в узлах учета электроэнергии – благодаря трансформатору тока нет необходимости измерять реальной ток, а можно измерить ток, уменьшенный в точно известное количество раз. Так же измеряют ток в электронных пусковых устройствах (преобразователях частоты, софтстартерах). Минус способа – трансформатор тока рассчитан на частоту 50/60 Гц, а переходные процессы во время пуска имеют широкий спектр и много гармоник. Поэтому можно сказать, что такой способ тоже обладает высокой инерционностью.
Конечно, реальность отличается от эксперимента. Прежде всего тем, что ток короткого замыкания реальной сети питания не бесконечен. То есть, провода, питающие двигатель, имеют сопротивление, на котором в момент пуска падает напряжение (иногда – до 50%). Из-за этого ограничения реальный пусковой ток будет меньше, а разгон – длительнее. Поэтому нужно понимать, что значение кратности пускового тока, указанное производителем, в реальности всегда будет меньше.

Для чего нужны двигатели – приводить в действие механизмы и получать прибыль!
Теперь разберём другой вопрос –