
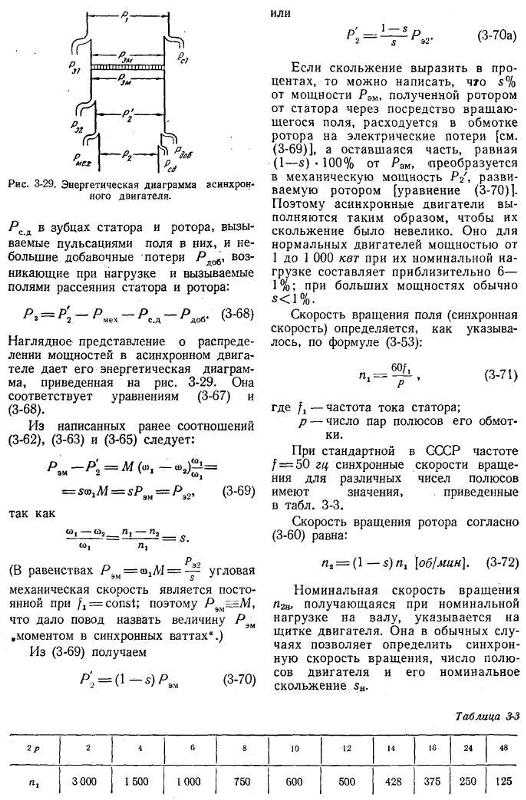
5.9. ПОТЕРИ И КПД АСИНХРОННОГО ДВИГАТЕЛЯ
В обмотку статора из сети поступает мощность P1. Часть этой мощности идет на потери в стали
Pсl, а также потери в обмотке статора Рэ1:
Оставшаяся мощность посредством магнитного потока передается на ротор и называется электромагнитной мощностью:
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора:
Оставшаяся мощность преобразуется в механическую, получившую название полной механической мощности:
Р2‘=Рэм-Рэ2
Воспользовавшись ранее полученной формулой
запишем выражение полной механической мощности:
тогда
или
Рэ2=SРэм,
т.е. мощность электрических потерь пропорциональна скольжению.
Мощность на валу двигателя P2 меньше полной механической мощности Р2’ на величину
механических Рмех и добавочных Рдоб потерь:
Р2=Р2’-(Рмех.+Рдоб.).
Таким образом:
Р2=Р1-SP,
где
SP=Pсl+Рэ1+Рэ2+Рмех.+Рдоб.
Коэффициент полезного действия
есть отношение мощности на валу P2 к потребляемой мощности P1:
Причины возникновения броска тока намагничивания
Причиной возникновения БНТ в силовых трансформаторах является резкое изменение уровня напряжения намагничивания. Хотя обычно возникновение БНТ связывают с включением трансформатора под напряжение, он также может быть обусловлен:
- Возникновением внешнего КЗ,
- Восстановлением уровня напряжения после отключения внешнего КЗ,
- Переходом КЗ из одного вида в другой (к примеру, переход однофазного КЗ в двухфазное КЗ на землю),
- Несинхронным подключением генератора к системе.
Поскольку ветвь намагничивания схемы замещения трансформатора, может быть представлена как шунт при его насыщении, ток намагничивания нарушает баланс между токами на выводах трансформатора. Дифференциальная защита воспринимает ток БНТ как дифференциальный, однако должна устойчиво функционировать в таком случае. Отключение трансформатора при БНТ является нежелательным с точки зрения условий обеспечения длительного срока службы трансформатора (отключение тока индуктивного характера вызывает высокие перенапряжения, что может представлять угрозу для трансформатора и быть косвенной причиной возникновения внутреннего КЗ).
5.18.5 Сельсины
Представим себе два асинхронных двигателя с фазным
ротором включенным последующей схеме (рис. 5.18.5.1). Обмотки статора С1,
С2, С3, называемые обмотками возбуждения, включены в общую
сеть трехфазного тока.
Обмотки ротора P1, P2, P3
объединены трехпроводниковой линией связи. Магнитные потоки обмоток возбуждения
при q1=q2 наводят в соответствующих
обмотках роторов равные и совпадающие по фазе ЭДС.
Если ротор двигателя Д1 повернуть на угол q1,
а ротор Д2 оставить на месте (q2=0), то в фазных обмотках
ротора двигателя Д2 будет наведена ЭДС E2>E1. В результате
в линии связи потечет ток DI от большего потенциала к меньшему.
,
где 2z — сумма сопротивлений обмоток роторов и линии связи.
Этот ток, пройдя по обмоткам роторов, взаимодействуя
с магнитными полями статоров, вызовет образование дополнительных вращающих моментов
DM. Поскольку направление момента DМ в каждом двигателе
будет свое, то в одном из них произойдет поворот ротора вправо (у двигателя
Д2), а у другого — влево (у двигателя Д1).
Следовательно, оба двигателя самостоятельно (синхронно)
придут в положение (q1=q2).
Такая система получила название синхронно-следящей.
Практическое использование эта система получила
в многоприводных механизмах (конвейерах, козловых кранах и т.п.).
В автоматике применяются так называемые сельсины.
Это маломощные асинхронные машины с однофазным статором и трехфазным ротором.

![Как работает электродвигатель [для чайников]](https://oksimetr.ru/wp-content/uploads/6/3/2/6324fe5a4146bf888883d96109754a22.jpeg)
Сельсины применяются для целей измерения или определения
угла, на который повернулся определенный механизм.
В сельсинной передаче всегда используются две машины:
сельсин-датчик и сельсин-приемник.
Обмотки возбуждения бывают обычно однофазные и
располагаются на явновыраженных полюсах. Число полюсов всегда два. Обмотки синхронизации
— трехфазные, размещаются в пазах ротора и оканчиваются тремя контактными кольцами
(рис. 5.18.5.2).
В отличие от силовых синхронно-следящих систем,
поворот ротора сельсина-датчика осуществляется принудительно, а ротор сельсина-приемника
приходит в движение автоматически. Поворот ротора фиксируется индикаторной стрелкой.
При наличии однофазных обмоток возбуждения на статоре
поворот ротора сельсина-датчика может осуществляться в любую сторону, т.к. пульсирующее
магнитное поле статора обеспечивает для этого необходимые условия.
Помимо приведенного индикаторного режима, сельсины
могут работать и в так называемом трансформаторном режиме.
В этом случае сельсин-приемник, не только показывает
угол рассогласования q, но и вырабатывает электрический сигнал
для управления мощным механизмом
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение — разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение — разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
|---|---|---|
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора.
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А
Полная потребляемая мощность:
S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных и модернизируемых трехфазных машин согласно ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
|---|---|---|
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
Назначение и сфера применения АД

Без асинхронного двигателя не обходится большинство предприятий.
Электродвигатели, которые называются асинхронными, применяются почти во всех отраслях промышленности и сельского хозяйства. Они тратят около 70% электричества, которое предназначено для превращения мощности тока в поступательное движение. Работа асинхронного двигателя считается наиболее эффективной в качестве электрической тяги. Без подобных машин не обходится большинство предприятий.
У данных устройств есть несколько положительных сторон:
- Простая и недорогая конструкция, поэтому производство машин не отнимает много времени и средств.
- Низкие расходы по эксплуатации обеспечены отказом от скользящего узелка токосъема, что и повышает надежность мотора.
- Доступность. Они продаются почти во всех магазинах по невысокой цене.
Данный вид машин бывает трехфазным или однофазным в зависимости от числа питающих частей. Если соблюдать правила техники безопасности и настроить электросеть, то трехфазный мотор может работать на однофазной сети.
https://youtube.com/watch?v=uXwamyaiUKo
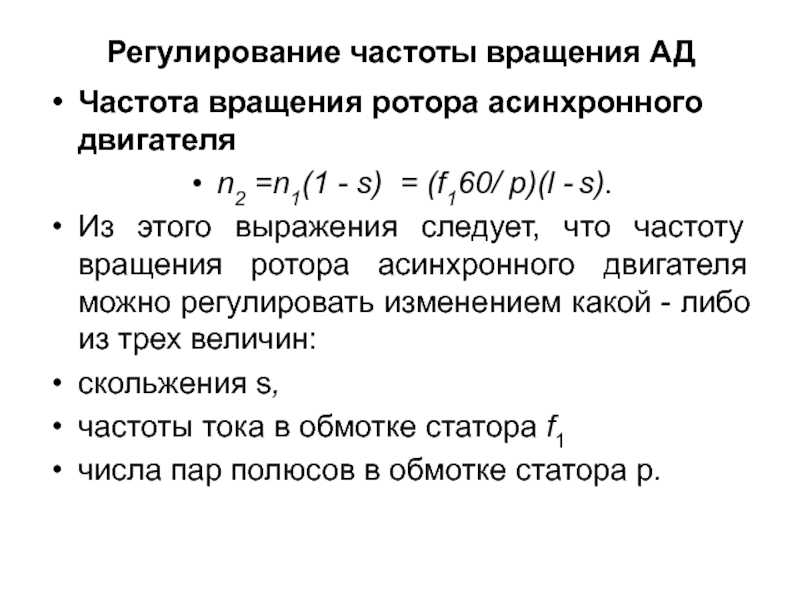
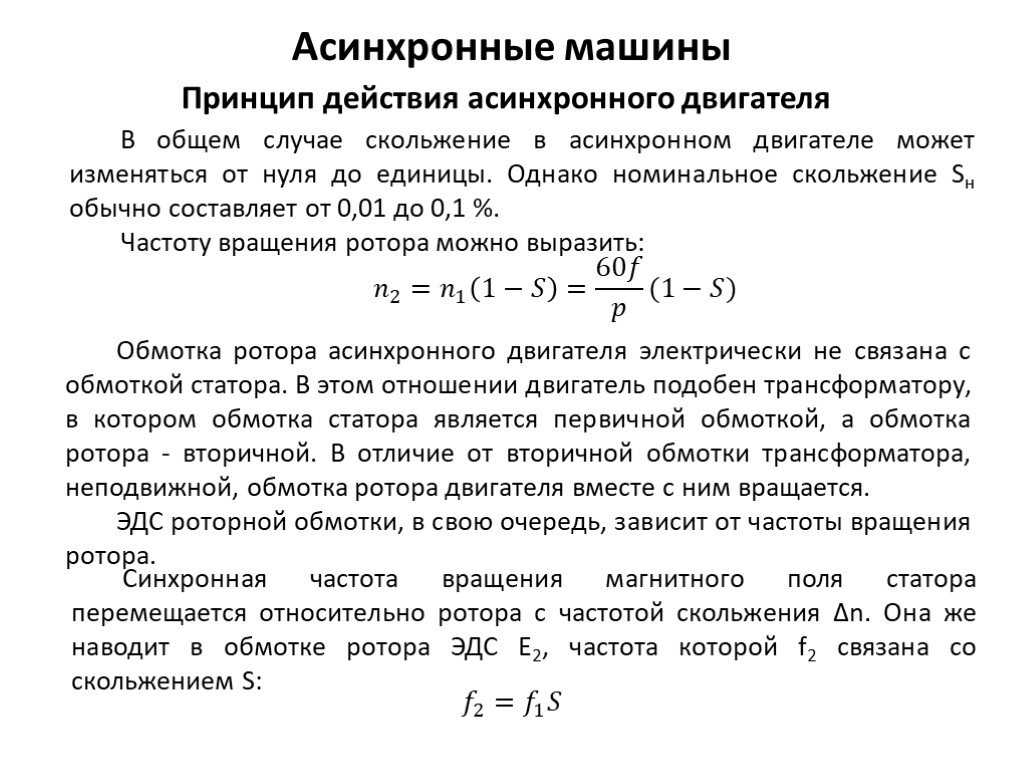
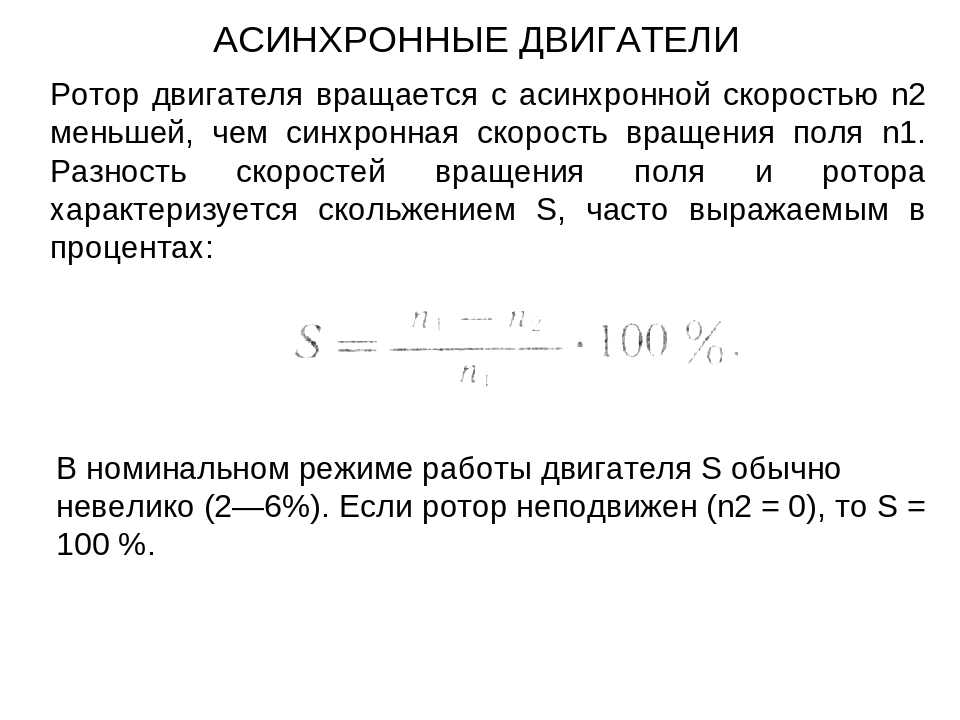
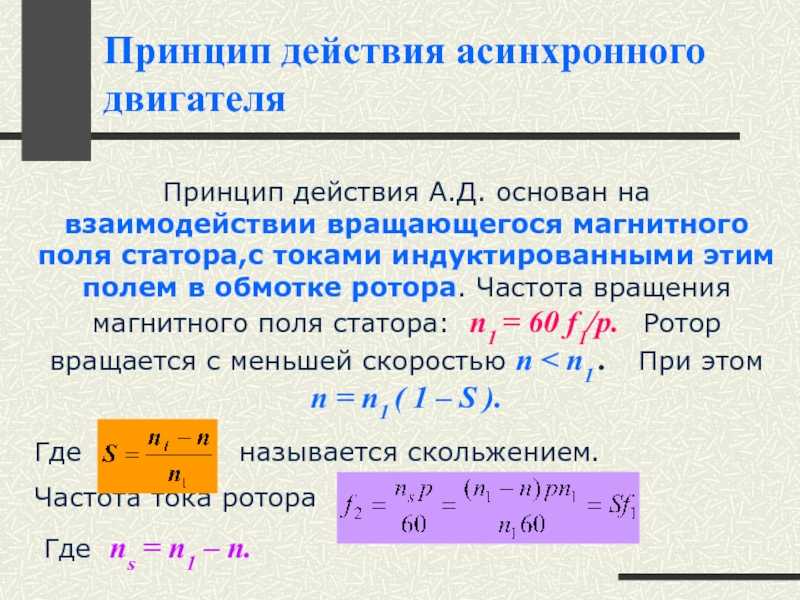
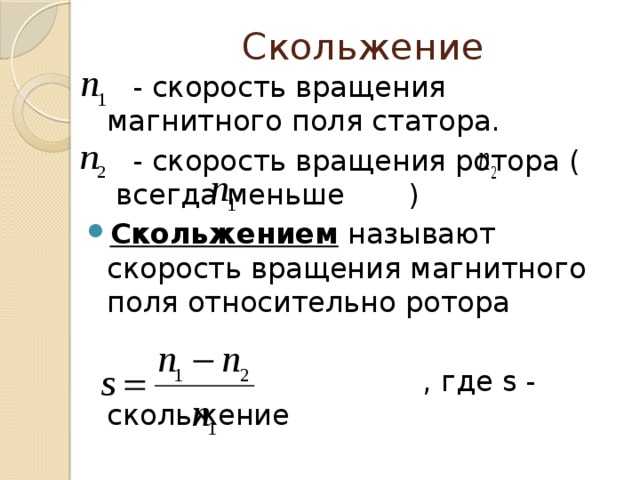
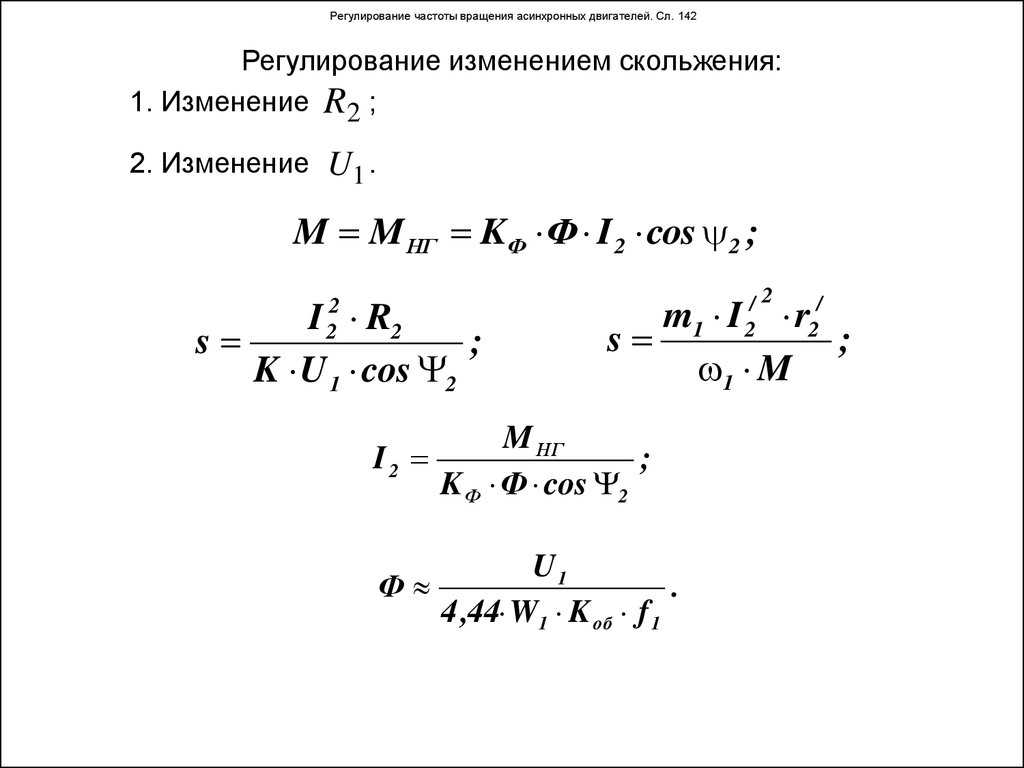
Скольжение S
Параметр скольжения есть во всех асинхронных силовых агрегатах. Возникает данное явление из-за разницы в частоте вращения магнитного поля статора и ротора. Индуцируемая в стержнях ЭДС может появляться только при их движении относительно магнитного поля. Ротор при этом немного отстает.
Если скорости вращения одинаковы, в стержнях клетки не индуцируется ток, что делает невозможным дальнейшее движение. Поэтому в любом исполнении и рабочей нагрузке ротор движется с немного меньшей скоростью, чем магнитное поле.
Измерение скольжения производится в процентах. На холостом ходу данный показатель стремится к 0. При застопоренном роторе (КЗ) параметр равен 1. В асинхронной системе с короткозамкнутым ротором параметр скольжения зависит от нагрузки.
От чего зависит пусковой ток?
Если посмотреть различных производителей, например страны Европы, США, Россия или Китай, то у всех этих батарей будет различный показатель пускового тока. Так, например если сравнить 55 Aч Китай и Европа, разница может быть на 30 – 40%! Но почему так?
Все дело в технологиях:
- Применение очищенного свинца, даже в простых кислотных АКБ приведет к быстрой зарядке и последующей разрядке, соответственно пусковые значения увеличиться.
- Большее количество пластин в таком же по габаритам корпусе.
- Большее количество электролита.
- Плюсовые пластины более пористые, что позволит больше накапливать заряда.
- Герметичные конструкции, не дают испаряться электролиту, что позволит батареи всегда держать нужный уровень, не оголяя пластины.

Конечно, можно добавить и качество сборки и порядочность производителя, все это дает большие результаты, нежели у конкурентов. Правда и стоят такие АКБ дороже.

Но на данный момент, есть и новые технологии — рекордсменами по отдачи пускового тока являются GEL и AGM аккумуляторы, у них ток отдачи может доходить до 1000 Ампер в 30 секунд, примерно в 3 – 4 раза больше, чем у обычных кислотных вариантов. Хотя у этих технологий также есть свои минусы и в первую очередь это цена.
Также стоит отметить, что при пуске двигателя напряжение батареи падает примерно до 9 Вольт, но сила тока многократно возрастает – это нормальный процесс. После пуска мотора, напряжение займет опять свои нормальные показатели в 12,7Вольта, а потраченный заряд восполнит генератор автомобиля. Если показатели напряжения при пуске падают до 6 Вольт (и очень долго восстанавливаются), то это может быть критично, стартеру просто не хватит энергии для запуска. Скорее всего, что АКБ выходит из строя.
Синхронные и асинхронные электромашины
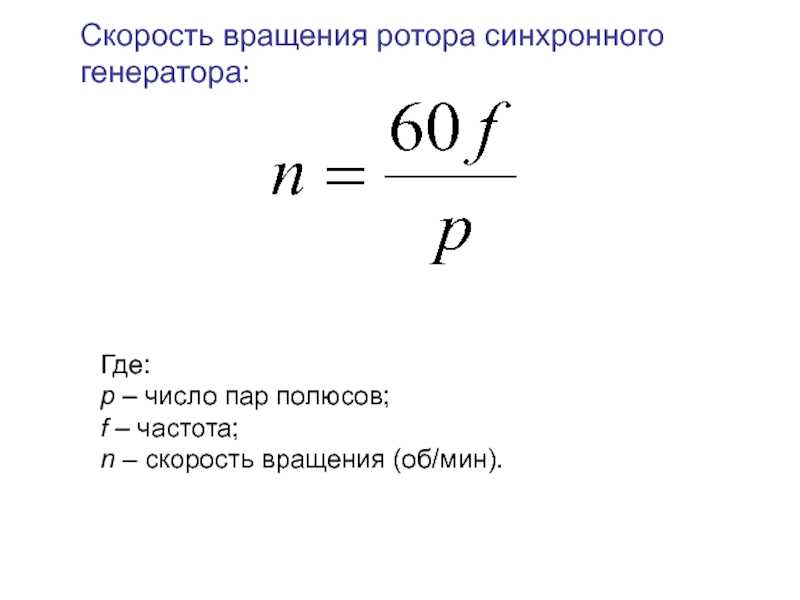
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
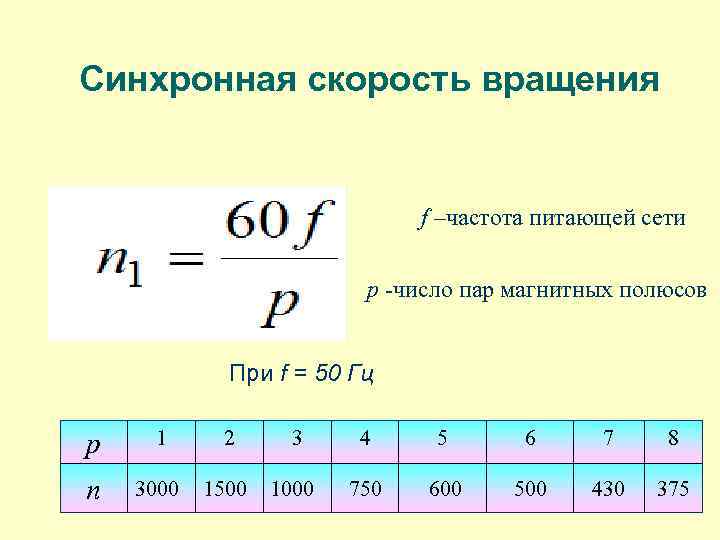
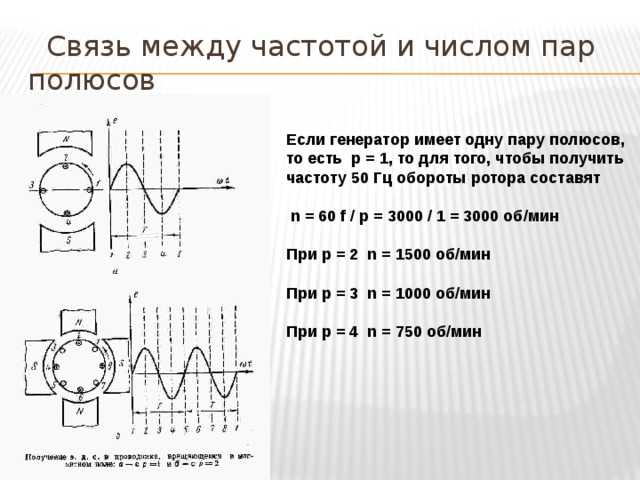
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Описание
Длительность затухания броска тока намагничивания составляет от нескольких секунд (в большинстве случаев) до нескольких минут (редко).
Основной причиной возникновения броска тока намагничивания трансформатора является резкое изменение величины напряжения на вводах трансформатора. В качестве основных причин изменения напряжения можно выделить следующие:
- включение отключенного трансформатора в работу;
- возникновение и отключение внешнего короткого замыкания;
- асинхронный ход в энергоситсеме.
Максимальное значнеие амплитуды броска тока намагничивания определяется величиной изменения напряжения и конструктивными особеностями трансформатора. В нормальных режимах работы величина тока намагничивания трансформатора не превышает 2-3% от номинального тока, а при включении трансформатора под напряжения его величина может превышать номинальный ток в 6-8 раз . Наибольшее значение ток намагничивания имеет когда трансформатора включается в момент перехода мгновенного значения напряжения через нуль.
Ток намагничивания содержит большую долю высших гармоник большую часть которых составляет вторая гармоника, а также апериодическую составляющую.
Вследствие того, что броско тока намагничивания может иметь достаточно большую амплитуду, то релейная защита трансформатора должна иметь блокировку от броска тока намагничивания.
Отключение транформатора при протеканиии в нём тока намагничивания является не желательным, так как может привести к перенапряжениям на выводах трансформатора.
Источник
Преимущества и недостатки короткозамкнутой разновидности
Высокая популярность и широкое распространение таких конструкций электродвигателя обусловлено его преимуществами:
- высокая стабильность работы при номинальной нагрузке;
- надежность и долговечность;
- простое обслуживание асинхронного мотора, низкие затраты на эксплуатацию;
- малая стоимость относительно других моделей;
- высокие показатели КПД двигателя.
При правильной эксплуатации такой агрегат прослужит долгое время, не требуя частого обслуживания.
Однако есть у системы и свои недостатки:
- высокий пусковой уровень напряжения;
- низкий коэффициент скольжения;
- повышенная реакция на перепады напряжения;
- необходимость применения дополнительного оборудования для безопасного пуска асинхронного агрегата (УПП, частотники);
- потребность во внешних управляющих узлах для регулировки скорости вращения.
Несмотря на свои недостатки, агрегаты асинхронного типа с короткозамкнутым ротором являются наиболее практичными и популярными в производстве и быту.
5.18.2 Индукционные регуляторы и фазорегуляторы
Индукционные регуляторы напряжения представляют
собой заторможенный асинхронный двигатель с фазовым ротором. Им можно регулировать
напряжение в широких пределах. Статорная и роторная обмотки в регуляторе соединены
электрически, но так, чтобы они могли быть смещены относительно друг друга поворотом
ротора. При подключении индукционного регулятора к сети вращающийся магнитный
поток наводит в обмотках статора и ротора ЭДС E1 и E2.
При совпадении осей в обмотках ЭДС E1 и E2 совпадают по
фазе, а на выходных зажимах регулятора устанавливается максимальное значение
напряжения.
При повороте ротора оси обмоток поворачиваются
на некоторый угол a. На такой же угол смещается и вектор E2.
При этом напряжение на выходе уменьшается. Поворотом ротора на угол 180° мы
устанавливаем на выходе минимальное напряжение.
Фазорегулятор предназначен для изменения фазы вторичного
напряжения относительно первичного. При этом величина вторичного напряжения
остается неизменной.
Фазорегулятор представляет собой асинхронную машину,
заторможенную специальным поворотным устройством. Напряжение подводится к статорной
обмотке, а снимается с роторной. В отличие от индукционного регулятора здесь
обмотки статора и ротора электрически не соединены. Изменение фазы вторичного
напряжения осуществляется поворотом ротора относительно статора.
![Как работает электродвигатель [для чайников]](https://oksimetr.ru/wp-content/uploads/2/9/8/2982c290fc29095931d59342631acc17.jpeg)
Применяется в автоматике и измерительной технике.
Способы подключения асинхронного двигателя
Как мы уже с вами узнали, асинхронный двигатель имеет три обмотки. На современный манер они обозначаются английскими буквами U,V,W. Начало каждой обмотки обозначается цифрой «1», а конец обмотки цифрой «2».
Поэтому, есть два способа соединения обмоток: звездой и треугольником.
Способ соединения «звезда»
Способ «звезда» подразумевает соединение одинаковых выводов обмоток (начала или концы обмоток) в одну (нулевую) точку.
В клеммной коробке двигателя это соединение будет иметь такой вид.
Как вы видите, в этом случае с помощью железных пластин мы закоротили концы обмоток в одну общую точку.
Соединение таким способом практикуется, в основном, на двигателях промышленного назначения. Часто завод-изготовитель, для таких двигателей, которые не будут реализовываться через розничную сеть, производит соединение «звездой» уже внутри статора. На корпус двигателя выводится не 6 клемм, а 3. В этом случае достаточно просто подать трехфазное напряжение. Поэтому, помните: если вы увидите, что у асинхронного двигателя только 3 провода, это значит, что его обмотки уже соединены по типу «звезда».
Способ соединения «треугольник»
Соединение «треугольник» выполняется по схеме: конец первой обмотки соединяется с началом второй, конец второй – с началом третьей, а конец третьей – с началом первой. В места соединения подается питающее трехфазное напряжение.
В двигателе это будет выглядеть вот таким образом.
Электромагнитный момент машины постоянного тока.
Момент возникает всегда, если в обмотке протекает ток, а она сама находится в магнитном поле. Однако роль электромагнитного момента в генераторе и двигателе различна. В двигателе момент является вращательным, а в генераторе тормозным, т. е противодействующим вращению якоря. Поэтому часто говорят, что генератор работает в режиме тормозящего момента, а двигатель в режиме противо – ЭДС.
Реакция якоря машины постоянного тока.
Воздействие намагничивающей силы якоря на основное поле называется реакцией якоря.
В машине результирующее поле одно, оно определяется совместным действием главного поля (создаваемого катушками возбуждения) и поля от реакции якоря.
Реакция якоря проявляется при работе машины под нагрузкой. Проявление реакции зависит от режима работы (двигатель или генератор):
1) От положения щёток относительно геометрической нейтрали
2) От насыщения магнитной цепи
Реакция якоря искажает основное поле машины. Реакция якоря может уменьшить основное поле машины, если магнитопровод насыщен.
Радикальным средством уменьшения реакции якоря является установка компенсационной обмотки, которая размещается в пазах башмаков главных полюсов и включается последовательно с обмоткой якоря. Но так, чтобы её намагничивающая сила была направлена противоположно намагничивающей силе якоря. Тогда результирующая кривая будет похожа на кривую при холостом ходе.
Компенсационная обмотка является радикальным средством, уничтожающим искажающее действие реакции якоря.
Другим, менее радикальным средством ослабления реакции якоря является увеличение зазора под краями главных полюсов.
Коммутация машин постоянного тока.
Коммутация – совокупность процессов, связанных с изменением тока в секции якоря при переходе её из одной параллельной ветви в другую. Процесс этот происходит под щёткой. Сопровождается этот процесс искрением. Искрение классифицируется ГОСТом.
![§ 107. режимы работы асинхронного двигателя [1970 кузнецов м.и. - основы электротехники]](https://oksimetr.ru/wp-content/uploads/a/2/9/a299a1d8d3946a965661cc6d9e05c63b.jpeg)
![Как работает электродвигатель [для чайников]](https://oksimetr.ru/wp-content/uploads/7/e/c/7ec76a80d66fe5027a7f286a9aa25609.jpeg)
Расчёт коммутации – переключение.
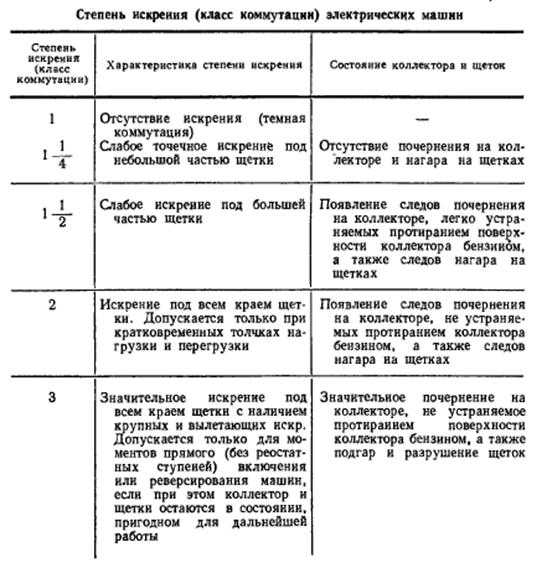
Для искрения ГОСТ 183-74.
- Механические
- Электромагнитного характера
- Потенциального характера
еср – среднее межламельное напряжение.
Дата добавления: 2019-09-08 ; ; Мы поможем в написании вашей работы!
Строение асинхронного двигателя
Для того, чтобы разобраться в теории работы двигателя, нам надо рассмотреть из чего же он состоит.
- Крышка клеммной коробки.
- Клеммная коробка.
- Стяжные болты корпуса.
- Вал ротора.
- Передняя крышка корпуса.
- Опорная плита корпуса.
- Корпус с ребрами охлаждения.
- Информационная табличка завода-изготовителя («шильдик»).
- Задняя крышка корпуса.
- Дополнительный вентилятор охлаждения двигателя («вертушка»). «Вертушка» устанавливается не на все двигатели. Если предполагаемое место работы обеспечивает хорошее воздушное охлаждение, то потребности в дополнительном обдуве не требуются.
На самом же деле асинхронный двигатель состоит из трех частей (слева-направо): ротора, статора и корпуса, но главными частями считаются именно ротор и статор, о которых мы с вами и поговорим.
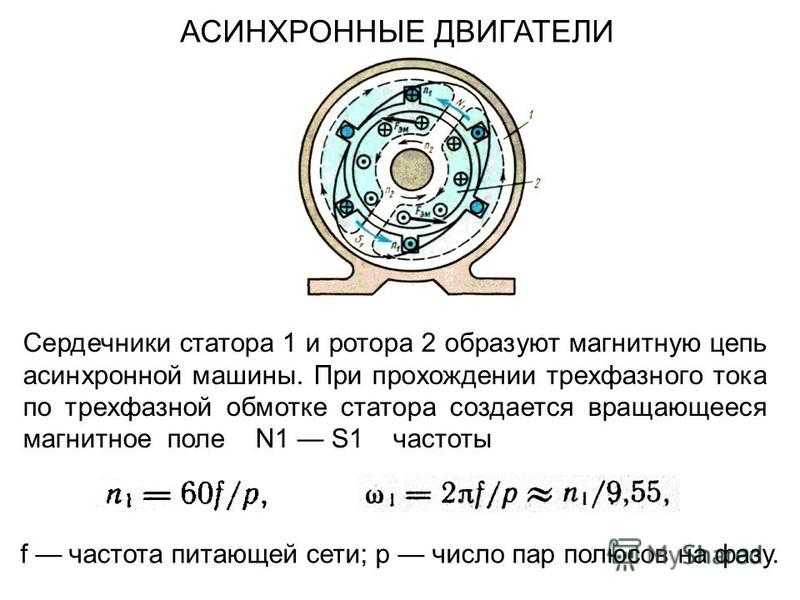
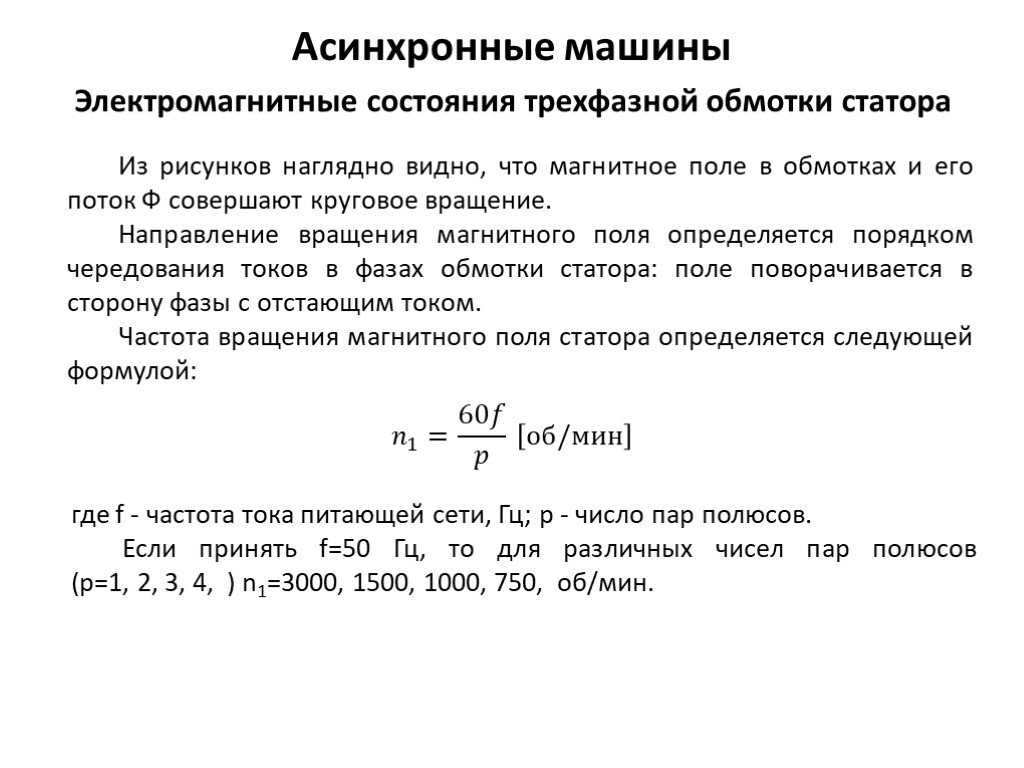
5.4. МАГНИТНЫЕ ПОЛЯ И ЭДС АСИНХРОННОГО ДВИГАТЕЛЯ
При подключении обмотки
статора к сети возникают токи I1, создающие вращающийся магнитный
поток Ф. Большая часть магнитного потока сцепляется с обмотками ротора и статора.
Это будет основной поток обмотки статора. Некоторая часть магнитного потока
рассеивается в пространстве. Назовем его потоком рассеяния Фрс. Он
cцепляется только с витками собственной обмотки.
Основной магнитный поток
асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора
со скоростью n1 и обмотку ротора со скоростью n2, наводя
в них основные ЭДС:
;
где W1k1 и W2k2 — произведения чисел витков на обмоточные коэффициенты;
Е2s=Е2S.
Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2,
которые, как в трансформаторе, могут быть выражены через соответствующие токи
I1 и I2 и индуктивные сопротивления х1 и х2s.
;
где х1 и х2s
— индуктивные сопротивления рассеяния обмоток статора и ротора.
Помимо названных выше ЭДС, в обмотках статора и ротора имеют место активные падения напряжения, которые
компенсируются соответствующими ЭДС Er1 и Еr2.
Почему происходит бросок при включении
Кратковременный скачок характеризуется броском намагничивающего тока трансформатора (БТН). Его значения на одном и том же приборе могут отличаться по величине при разных включениях. Причиной образования БТН в силовых устройствах является внезапное изменение уровня напряжения намагничивания. Помимо нагрузки, передаваемой на обмотку, скачок может быть вызван и другими причинами:
- внешнее короткое замыкание (КЗ);
- восстановление напряжения в контуре;
- преобразование КЗ;
- несинхронное подключение генератора.
Ток намагничивания вносит дисбаланс на выводах трансформатора. Защита прибора воспринимает БТН как дифференциальный ток. Но чтобы она корректно выполняла свое назначение, система должна эффективно функционировать и отстраиваться с учетом БТН путем включения в цепь таких вспомогательных устройств, как промежуточные трансформаторы.
При включении обмотки на полную нагрузку вследствие асинхронного распределения мощности и переходных волновых процессов возникает высокое перенапряжение, способное вызвать внутреннее короткое замыкание.
Важно! Перенапряжения по причине БТН являются безопасными только при правильной организации дифференциальной защиты системы
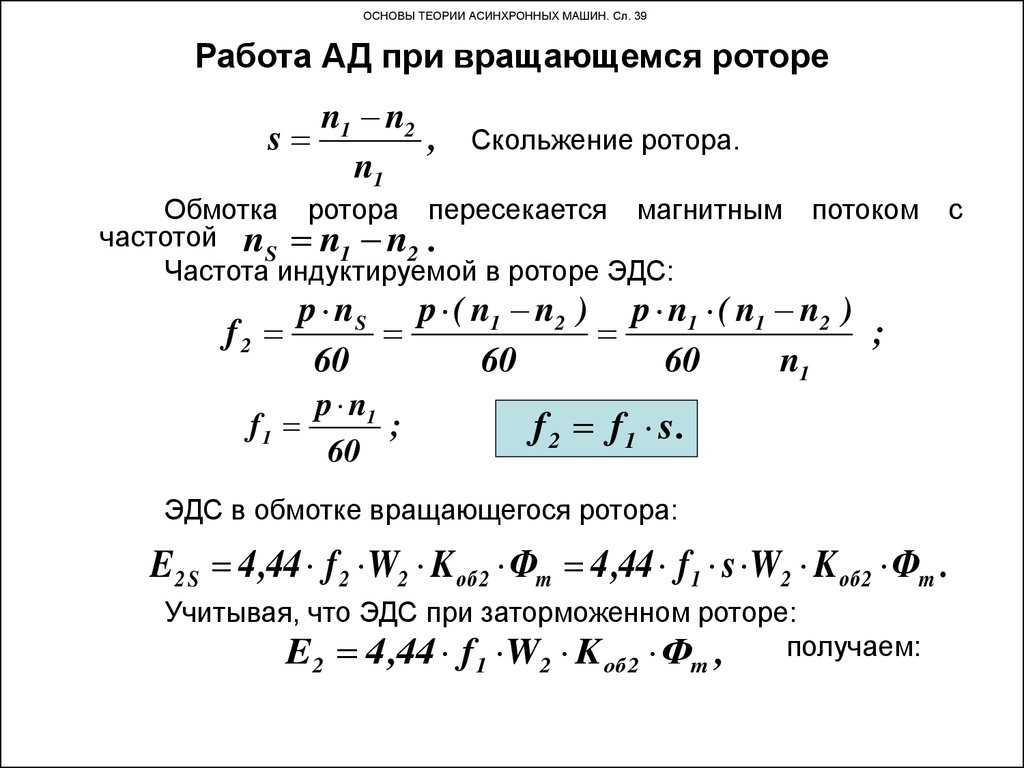
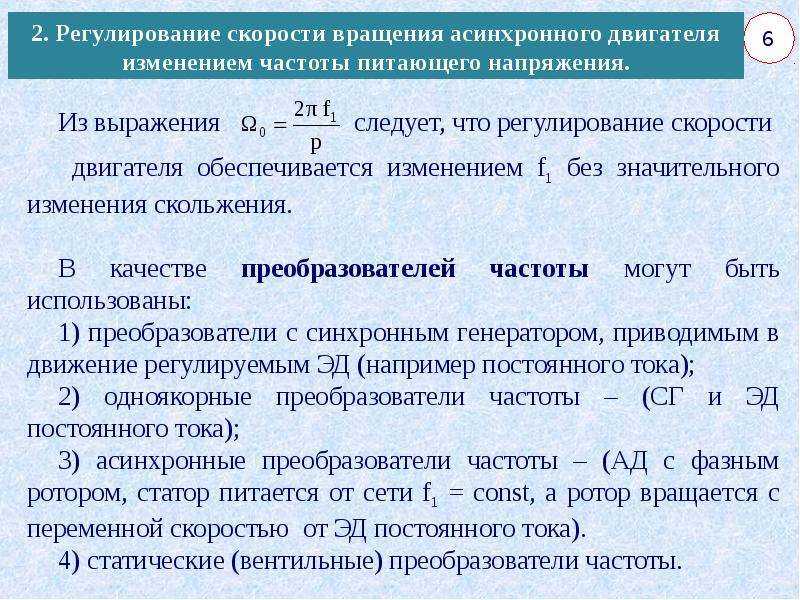
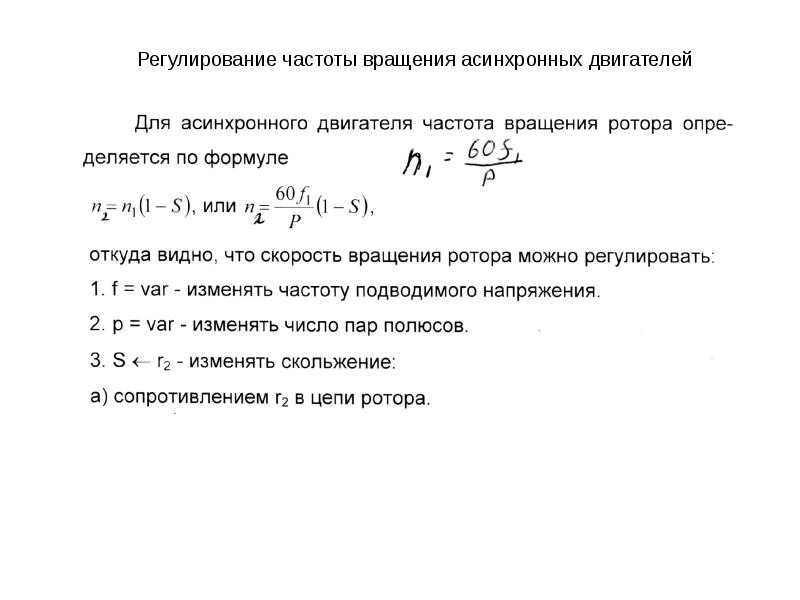
5.18.3 Асинхронный преобразователь частоты
Как известно, частота тока в цепи ротора асинхронного
двигателя зависит от скольжения, т.е. определяется разностью частот вращения
ротора и поля статора.
.
Указанное свойство позволяет использовать двигатель
в качестве преобразователя частоты (рис. 5.18.3.1). Если обмотку статора подключить
к сети промышленной частоты f1, а ротор посредством постороннего
двигателя приводится во вращение против поля статора, то скольжение возрастает,
а частота тока ротора f2 соответственно увеличивается по сравнению
с частотой сети f1 в несколько раз. Если требуется уменьшить частоту
тока, то ротор преобразователя надо вращать в направлении вращающегося поля
статора.
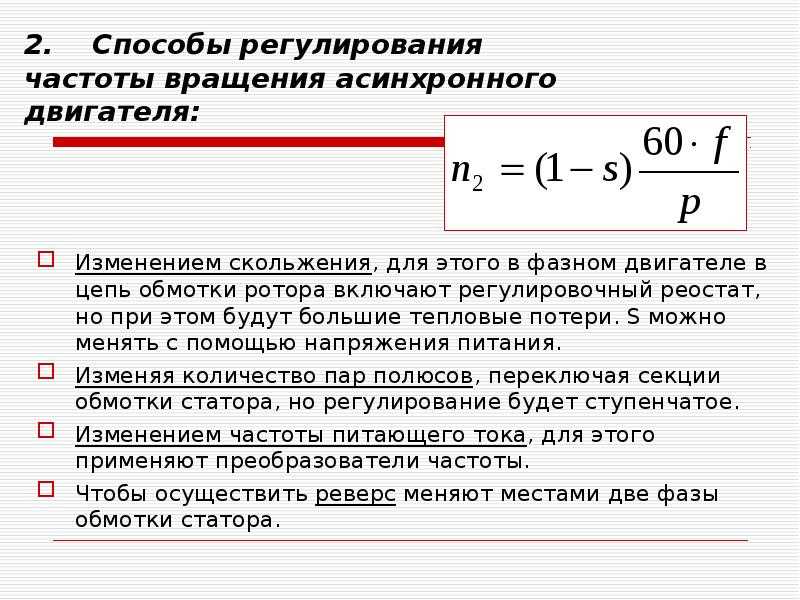
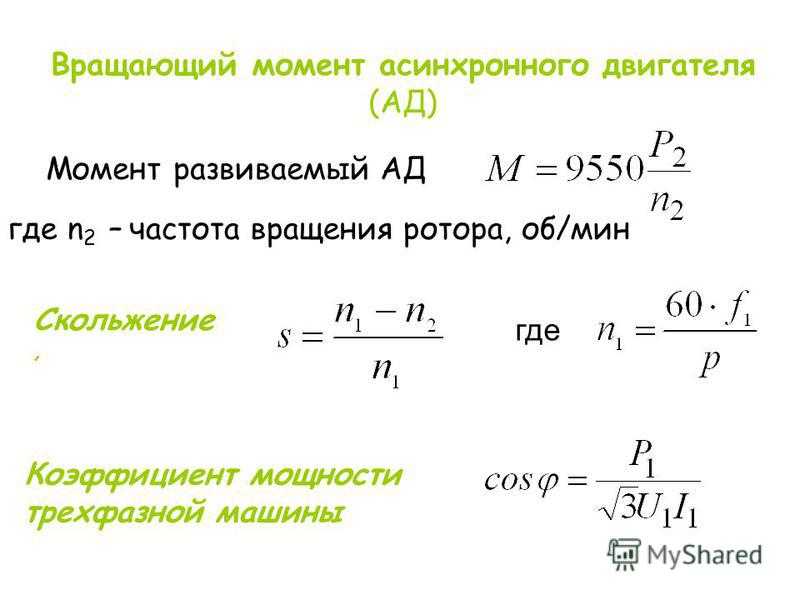
Асинхронный двигатель с двумя скоростями
Иногда необходимо изменить скорость асинхронного двигателя. Механизмы с управлением от электронного блока дорогие, поэтому применяют двухскоростной асинхронный двигатель. Принцип такого механизма в том, что обмотку в этом моторе подключают особым образом, по схеме Даландера, что меняет скорость вращения.
Схема подключения Даландера:
Подключая выводы U1, V1, W1 к напряжению в три фазы, двигатель вписывается в схему «треугольник» и работает на пониженной скорости. Если выводы (U1, V1, W1) замкнуть, а питание кинуть на (U2, V2, W2), то получится двухскоростной электродвигатель, работающий по схеме «двойная звезда», увеличивающей скорость в два раза.
Как узнать пусковой ток?
Кратность пускового тока (отношение пускового тока к номинальному) найти в документации на двигатель бывает не так-то просто. Но его можно измерить (оценить, узнать) самому. Вот навскидку несколько способов:
- Первый способ (лучший для теоретического изучения) – использовать осциллограф. Взять шунт (например, резистор 0,1…0,5 Ом, чем меньше по сравнению с обмотками, тем лучше), и посмотреть на нём осциллограмму в момент пуска. Далее из максимального амплитудного значения определяем действующее напряжение (поделить на корень из 2), далее по закону Ома считаем пусковой ток. Можно ничего не умножать и не делить – просто измерить клещами ток в рабочем режиме, и умножить его на разницу токов на экране осциллографа. Способ хорош тем, что видно переходные процессы, вызванные ЭДС самоиндукции, мгновенные значения тока, длительность разгона. Кроме того, учитываются параметры питающей сети. Ещё плюс – пусковой ток измеряется реальный, на реальном двигателе и механизме.
- Второй способ измерения пускового тока – подать на двигатель пониженное (в 5-10 раз) напряжение рабочей частоты и измерить ток. Почему пониженное? Это необходимо для того, чтобы ротор можно было легко зафиксировать, не допуская перегрева. Измеренный ток пересчитать, получим пусковой. Достаточно измерить ток на одной фазе. По другим токи будут (обязаны быть) такими же. Этот способ используют при производстве и испытаниях двигателей. Именно этим способом производители получают табличные данные. Способ опирается на номинальный ток, в реальности (на реальном механизме) пусковой ток может быть другим!
- Измерить пусковой ток токоизмерительными клещами. Плюс этого способа – простота и оперативность. Клещи используют в большинстве случаев для проверки режимов работы двигателей. Минус – такие клещи достаточно инерционны, а нам нужно увидеть, что происходит за доли секунды. Но этот минус нивелируется, когда мы измеряем ток при пуске нагрузки с высоким моментом инерции (вентиляторы, насосы с массивными крыльчатками). Пуск длится более 10 сек, и на экране клещей всё видно. Добавлю, что есть клещи с функцией Inrush, которые могут измерять пусковой ток от 0 до максимума в течение времени интегрирования порядка 100 мс.
- Трансформатор тока. Такой используется, например, в узлах учета электроэнергии – благодаря трансформатору тока нет необходимости измерять реальной ток, а можно измерить ток, уменьшенный в точно известное количество раз. Так же измеряют ток в электронных пусковых устройствах (преобразователях частоты, софтстартерах). Минус способа – трансформатор тока рассчитан на частоту 50/60 Гц, а переходные процессы во время пуска имеют широкий спектр и много гармоник. Поэтому можно сказать, что такой способ тоже обладает высокой инерционностью.
Конечно, реальность отличается от эксперимента. Прежде всего тем, что ток короткого замыкания реальной сети питания не бесконечен. То есть, провода, питающие двигатель, имеют сопротивление, на котором в момент пуска падает напряжение (иногда – до 50%). Из-за этого ограничения реальный пусковой ток будет меньше, а разгон – длительнее. Поэтому нужно понимать, что значение кратности пускового тока, указанное производителем, в реальности всегда будет меньше.
Для чего нужны двигатели – приводить в действие механизмы и получать прибыль!
Теперь разберём другой вопрос –
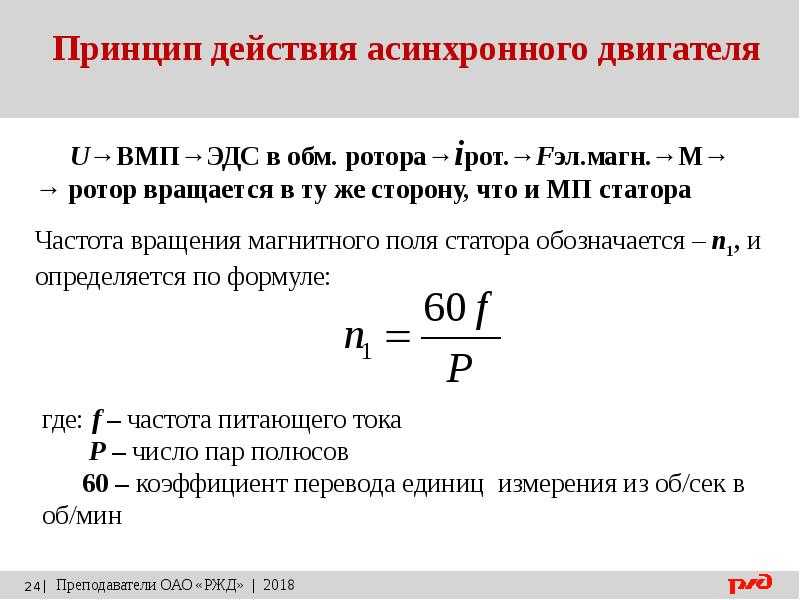
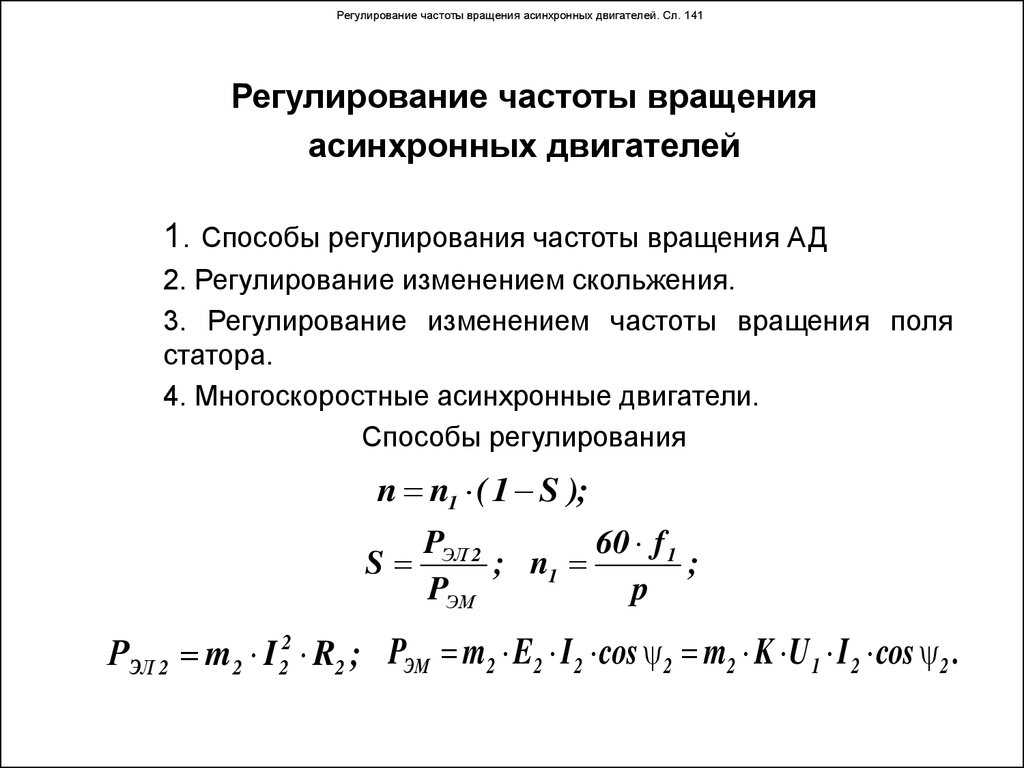
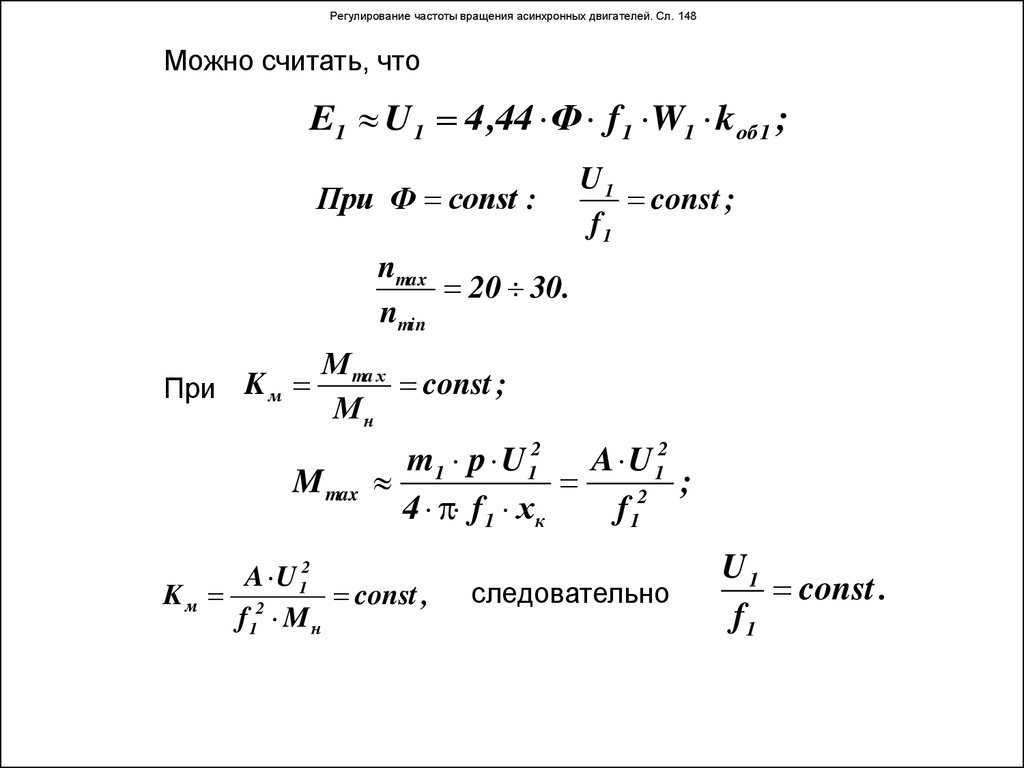
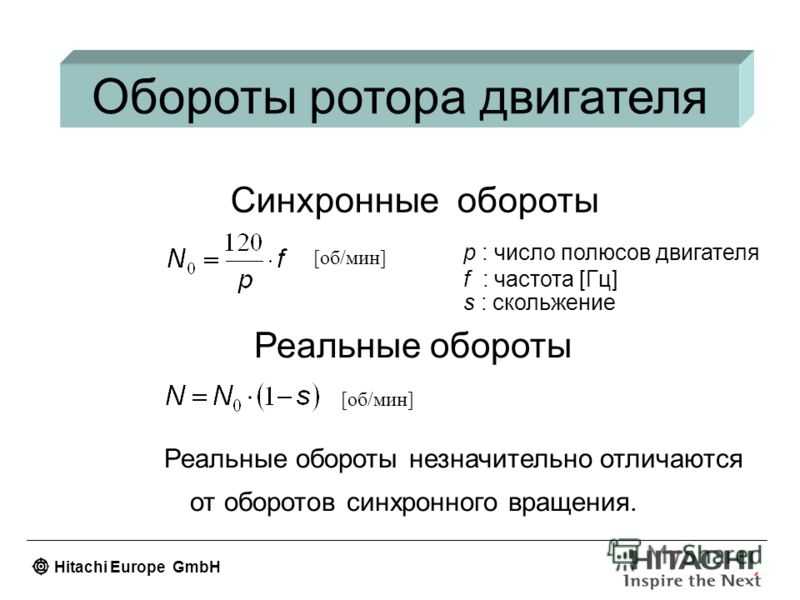
Частота вращения: формула
Количество повторений каких-либо событий или их возникновения за одну единицу таймера называется частотой. Это физическая величина измеряется в герцах – Гц (Hz). Она обозначается буквами ν, f, F, и есть отношение количества повторяющихся событий к промежутку времени, в течение которого они произошли.

При обращении предмета вокруг своего центра можно говорить о такой физической величине, как частота вращения, формула:
где:
- N – количество оборотов вокруг оси или по окружности,
- t – время, за которое они были совершены.
В системе СИ обозначается как – с-1 (s-1) и именуется как обороты в секунду (об/с). Применяют и другие единицы вращения. При описании вращения планет вокруг Солнца говорят об оборотах в часах. Юпитер делает одно вращение в 9,92 часа, тогда как Земля и Луна оборачиваются за 24 часа.
Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.
Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы
в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
Асинхронный двигатель имеет три «куска» медного провода
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Реальное фото статора одного из асинхронного двигателя выглядит вот так.





