
5.7. ВЕКТОРНАЯ ДИАГРАММА АСИНХРОННОГО ДВИГАТЕЛЯ
Используя принципы построения
векторной диаграммы для трансформатора, построим ее для асинхронного двигателя.
Вначале во втором основном уравнении величину r2‘ представим в виде:
,
что математически не противоречит друг другу.
Тогда само уравнение можно переписать:
Используя три основных
уравнения двигателя, построим векторную диаграмму, которая, будет несколько
напоминать диаграмму трансформатора (рис. 5.7.1).
Вторичное напряжение определяется вектором:
,
иначе говоря, асинхронный двигатель в электрическом отношении работает как трансформатор при активной нагрузке.
Мощность, отдаваемая вторичной обмоткой данного трансформатора
,
представляет собой полную механическую мощность, развиваемую двигателем.
Пуск электродвигателя с фазным ротором
Пусковые свойства асинхронного двигателя зависят от особенностей его конструкции, в частности от устройства ротора.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске асинхронного двигателя имеет место повышенное потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самой асинхронном двигателе, но и на сообщение движущимся звеньям производственного агрегата определенной кинетической энергии. Поэтому при пуске асинхронный двигатель должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп= 1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора.
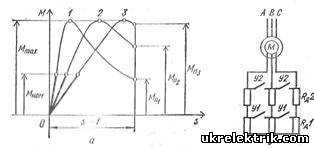
Рис. 1. Пуск трехфазного асинхронного двигателя с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора.
Так, при замкнутых контактах ускорения У1, У2, т. е. при пуске асинхронного двигателя с замкнутыми накоротко контактными кольцами, начальный пусковой момент Мп1 = (0,5 -1,0) Мном, а начальный пусковой ток Iп = (4,5 — 7) Iном и более.
Малый начальный пусковой момент асинхронного электродвигателя с фазным ротором может оказаться недостаточным для приведения в действие производственного агрегата и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения. Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.

Введение в цепь ротора двигателя регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax (рис. 1, а, кривая 3), если критическое скольжение двигателя с фазным ротором
sкр = (R2′ + Rд’) / (Х1 + Х2′) = 1,
где Rд’ — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора. Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда Мп = (0,1 — 0,4) Mном, нормальным, если Мп — (0,5 — 0,75) Мном, и тяжелым при Мп ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов. Допустимое изменение момента в процессе разгона M(t) определяется электрическими и механическими условиями, лимитирующими пиковый предел момента М > 0,85Ммах, момент переключения М2 > > Мс (рис. 2), а также ускорение.
Рис. 2. Пусковые характеристики трехфазного асинхронного двигателя с фазным ротором
Переключение пусковых резисторов обеспечено поочередным включением контакторов ускорения Y1, Y2 соответственно в моменты времени t1, t2 отсчитываемые с момента пуска двигателя, когда в процессе разгона вращающий момент М становится равным моменту переключения М2. Благодаря этому на протяжении всего пуска все пиковые моменты получаются одинаковыми и все моменты переключения равны между собой.
Поскольку вращающий момент и ток асинхронного двигателя с фазным ротором взаимно связаны, то можно при разгоне ротора установить пиковый предел тока I1 = (1,5 — 2,5) Iном и ток переключения I2, который должен обеспечить момент переключения М2 > Мc.
Отключение асинхронных двигателей с фазным ротором от питающей сети всегда выполняют при цепи ротора, замкнутой накоротко, во избежание появления перенапряжений в фазах обмотки статора, которые могут превысить номинальное напряжение этих фаз в 3 — 4 раза, если цепь ротора в момент отключения двигателя окажется разомкнутой.
Отрывок, характеризующий Скольжение асинхронного двигателя
Обед уже кончился, государь встал и, доедая бисквит, вышел на балкон. Народ, с Петей в середине, бросился к балкону. – Ангел, отец! Ура, батюшка!.. – кричали народ и Петя, и опять бабы и некоторые мужчины послабее, в том числе и Петя, заплакали от счастия. Довольно большой обломок бисквита, который держал в руке государь, отломившись, упал на перилы балкона, с перил на землю. Ближе всех стоявший кучер в поддевке бросился к этому кусочку бисквита и схватил его. Некоторые из толпы бросились к кучеру. Заметив это, государь велел подать себе тарелку бисквитов и стал кидать бисквиты с балкона. Глаза Пети налились кровью, опасность быть задавленным еще более возбуждала его, он бросился на бисквиты. Он не знал зачем, но нужно было взять один бисквит из рук царя, и нужно было не поддаться. Он бросился и сбил с ног старушку, ловившую бисквит. Но старушка не считала себя побежденною, хотя и лежала на земле (старушка ловила бисквиты и не попадала руками). Петя коленкой отбил ее руку, схватил бисквит и, как будто боясь опоздать, опять закричал «ура!», уже охриплым голосом. Государь ушел, и после этого большая часть народа стала расходиться. – Вот я говорил, что еще подождать – так и вышло, – с разных сторон радостно говорили в народе. Как ни счастлив был Петя, но ему все таки грустно было идти домой и знать, что все наслаждение этого дня кончилось. Из Кремля Петя пошел не домой, а к своему товарищу Оболенскому, которому было пятнадцать лет и который тоже поступал в полк. Вернувшись домой, он решительно и твердо объявил, что ежели его не пустят, то он убежит. И на другой день, хотя и не совсем еще сдавшись, но граф Илья Андреич поехал узнавать, как бы пристроить Петю куда нибудь побезопаснее. 15 го числа утром, на третий день после этого, у Слободского дворца стояло бесчисленное количество экипажей. Залы были полны. В первой были дворяне в мундирах, во второй купцы с медалями, в бородах и синих кафтанах. По зале Дворянского собрания шел гул и движение. У одного большого стола, под портретом государя, сидели на стульях с высокими спинками важнейшие вельможи; но большинство дворян ходило по зале.
§ 108. Вращающий момент асинхронного двигателя
Принцип действия асинхронного двигателя, как указывалось, основан на взаимодействии вращающегося поля и тока, индуктированного этим полем в обмотке ротора. В результате взаимодействия магнитного потока Φ с током I2, протекающим в проводниках обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение.
Поэтому вращающий момент, создаваемый на валу двигателя, зависит от величины тока ротора I2 и от магнитного потока Φ.
Кроме того, на величину вращающего момента асинхронного двигателя влияет сдвиг фаз Ψ2 между током I2 и э.д.с. ротора. Для уяснения влияния cos Ψ2 рассмотрим картину электромагнитных сил, действующих на проводники ротора.
Рассмотрим сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз между током и э.д.с. можно пренебречь (рис. 255, а). Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающимся, предположим, по направлению часовой стрелки. Пользуясь правилом «правой руки», определяем направление э.д.с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу «левой руки». Как видно из чертежа, ротор под действием электромагнитных сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рис. 255. Электромагнитные силы, действующие на проводники ротора: а — при отсутствии индуктивности, б — при наличии индуктивности
Рассмотрим второй случай, когда индуктивность обмотки ротора относительно велика. В этом случае сдвиг фаз между током ротора I2 и э.д.с. ротора будет также значительным. На рис. 255, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э.д.с. остается таким же, как и на рис. 255, а, но вследствие запаздывания тока по фазе максимум тока I2 наступает позднее, чем максимум э.д.с.
На рис. 255 показано направление индуктированных токов в отдельных проводниках ротора в рассматриваемый момент времени, а также направления отдельных электромагнитных сил, действующих на проводники. Если Ψ2 = 0, то все электромагнитные силы будут действовать согласованно. При большем Ψ2 часть электромагнитных сил создают вращающий момент, направленный по часовой стрелке, а остальные силы — против часовой стрелки.
Магнитный поток Φ не зависит от скорости вращения ротора n. Следовательно, вращающий момент М пропорционален только активной составляющей тока ротора I2 cos Ψ2. Индуктивное сопротивление ротора Х2 = 2πfL2, а следовательно, и величина cos Ψ2 зависят от частоты тока ротора f2 и поэтому с изменением нагрузки на валу ротора изменяется не только величина тока I2, но и величина cos Ψ2. Таким образом, изменение вращающего момента, развиваемого двигателем, с изменением скорости вращения (и скольжения) определяется одновременно как изменением тока I2, так и изменением cos Ψ2.
На основании математического анализа и экспериментального исследования можно построить график зависимости вращающего момента асинхронного двигателя М от скольжения S (рис. 256). Так как каждому значению S соответствует определенное значение n = n (1 — S), то указанный график можно представить и как зависимость вращающего момента от скорости n. Зависимость между вращающим моментом М и скольжением S называется механической характеристикой двигателя (рис. 256).
Рис. 256. Механические характеристики асинхронного двигателя
На кривой А видно, что в начальный момент пуска, когда S = 1 и n = 0, вращающий пусковой момент двигателя относительно невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos Ψ2 имеет малое значение (около 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет наибольшим. По мере разгона двигателя скольжение уменьшается.
При некотором скольжении S1, называемом критическим, вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения (или, иначе говоря, при дальнейшем увеличении скорости вращения двигателя) вращающий момент будет быстро уменьшаться и при скольжении S = 0 момент двигателя будет равен нулю. Этот режим соответствует идеальному холостому ходу, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь.
5.18.2 Индукционные регуляторы и фазорегуляторы
Индукционные регуляторы напряжения представляют
собой заторможенный асинхронный двигатель с фазовым ротором. Им можно регулировать
напряжение в широких пределах. Статорная и роторная обмотки в регуляторе соединены
электрически, но так, чтобы они могли быть смещены относительно друг друга поворотом
ротора. При подключении индукционного регулятора к сети вращающийся магнитный
поток наводит в обмотках статора и ротора ЭДС E1 и E2.
При совпадении осей в обмотках ЭДС E1 и E2 совпадают по
фазе, а на выходных зажимах регулятора устанавливается максимальное значение
напряжения.
При повороте ротора оси обмоток поворачиваются
на некоторый угол a. На такой же угол смещается и вектор E2.
При этом напряжение на выходе уменьшается. Поворотом ротора на угол 180° мы
устанавливаем на выходе минимальное напряжение.
Фазорегулятор предназначен для изменения фазы вторичного
напряжения относительно первичного. При этом величина вторичного напряжения
остается неизменной.
Фазорегулятор представляет собой асинхронную машину,
заторможенную специальным поворотным устройством. Напряжение подводится к статорной
обмотке, а снимается с роторной. В отличие от индукционного регулятора здесь
обмотки статора и ротора электрически не соединены. Изменение фазы вторичного
напряжения осуществляется поворотом ротора относительно статора.
Применяется в автоматике и измерительной технике.
12.5. Однофазные асинхронные двигатели
Однофазный двигатель
имеет одну обмотку, расположенную на статоре. Однофазная обмотка, питаемая
переменным током, создаст пульсирующее магнитное поле. Поместим в это
поле ротор с короткозамкнутой обмоткой. Ротор вращаться не будет. Если
раскрутить ротор сторонней механической силой в любую сторону, двигатель
будет устойчиво работать.
Объяснить это можно следующим образом.
Пульсирующее магнитное поле можно
заменить двумя магнитными полями,
вращающимися в противоположных направлениях с синхронной частотой n1
и имеющими амплитуды магнитных потоков, равные половине амплитуды магнитного
потока пульсирующего поля. Одно из магнитных полей называется прямовращающимся,
другое — обратновращающимся. Каждое из магнитных полей индуктирует в
роторной обмотке вихревые токи. При взаимодействии вихревых токов с
магнитными полями образуются вращающие моменты, направленные встречно
друг другу.
На рис. 12.7 изображены зависимости
момента от прямого поля М’, момента от
обратного поля М» и результирующего момента М в функции скольжения М
= М’ — M».
Рис. 12.7
Оси скольжений направлены встречно друг
другу.
В пусковом режиме на ротор действуют
вращающие моменты, одинаковые по величине и противоположные по направлению.
Раскрутим ротор сторонней силой в направлении
прямовращающегося магнитного поля. Появится избыточный (результирующий)
вращающий момент, разгоняющий ротор до скорости, близкой к синхронной.
При этом скольжение двигателя относительно прямовращающегося магнитного
поля
.
Скольжение двигателя относительно обратновращающегося
магнитного поля
.
Рассматривая результирующую характеристику,
можно сделать следующие выводы:
Для создания пускового момента однофазные
двигатели снабжают пусковой обмоткой, пространственно смещенной относительно
основной, рабочей обмотки на 90o. Пусковая обмотка подключается
к сети через фазосдвигающие элементы: конденсатор или активное сопротивление.
Рис. 12.8 |
На рис. 12.8 показана схема включения обмоток двигателя, где Р — рабочая обмотка, П — пусковая обмотка. Емкость фазосдвигающего элемента С подбирают таким образом, чтобы токи в рабочей и пусковой обмотках различались по фазе на 90o. Трехфазный асинхронный двигатель может работать от однофазной сети, если подключить его обмотки по следующим схемам.(Рис. 12.9) |
Рис.12.9
В схеме на рис. 12.9а статорные обмотки
соединены звездой.
В схеме на рис. 12.9б статорные обмотки
соединены треугольником. Величина емкости С ≈ 60 мкф на 1 кВт мощности.
Большая Энциклопедия Нефти и Газа
Скольжение — асинхронный двигатель
Каким выражением определяется скольжение асинхронного двигателя .
В некоторых пределах скольжение асинхронного Двигателя примерно пропорционально моменту нагрузки на его валу. Из векторной диаграммы видно, что тогда возрастает и ток / i статора, а сдвиг по фазе cpi этого тока относительно напряже-ния й сети уменьшается.
В некоторых пределах скольжение асинхронного двигателя примерно пропорционально моменту нагрузки на его валу.
В нормальных режимах скольжение асинхронного двигателя имеет малое положительное значение, поэтому эквивалентное, активное сопротивление Rpo. Js в цепи ротора значительно больше действительного активного сопротивления ротора Rpor — Дополнительное активное сопротивление рот ( 1 — s) / s показано на рис. 3 — 2 отдельно.
Таким образом, скольжение асинхронного двигателя численно равно отношению потерь в обмотке ротора рм2 к развиваемой двигателем электромагнитной мощности Рэм.
Момент вращения и скольжения асинхронных двигателей зависит от напряжения на их зажимах. При снижении напряжения хотя бы на 10 % по сравнению с номинальным значением может несколько снизиться производительность работы приводимых двигателями производственных механизмов. При значительном снижении напряжения двигатели могут остановиться. Повышение напряжения на зажимах двигателя приводит к увеличению потребляемой их реактивной мощности. В случае снижения напряжения на зажимах двигателя при той же потребляемой мощности увеличивается его ток. При этом происходит более интенсивный нагрев изоляции двигателя и соответственно снижается срок ее службы. Расчеты показывают, что при длительной работе полностью загруженного двигателя с отклонениями, напряжения на зажимах. V-10 % срок его службы сокращается примерно вдвое.
В некоторых пределах скольжение асинхронного двигателя примерно пропорционально моменту нагрузки на его валу.
В некоторых пределах скольжение асинхронного двигателя примерно пропорционально моменту нагрузки на его валу. Из векторной диаграммы видно, что тогда возрастает и ток 1г статора, а сдвиг по фазе рг этого тока относительно напряжения U1 сети уменьшается.
Такое нарастание объясняется возрастанием скольжения асинхронных двигателей в связи со снижением напряжения сети.
По принципу использования энергии скольжения асинхронного двигателя каскады делятся на две группы: электромеханические и электрические. К первым относятся каскады, у которых энергия скольжения с помощью электромашинного или статического преобразователя подводится к дополнительной электрической машине, соединенной валом с асинхронным двигателем. У каскадов этой группы имеется электрическое соединение колец ротора асинхронного двигателя посредством преобразователя с якорем дополнительной машины, — а также механическое соединение последней с главным приводным двигателем. В электрических каскадах энергия скольжения асинхронного двигателя посредством электромашинного или статического преобразователя передается в сеть переменного тока. У каскадов этой группы имеется только электрическое соединение колец ротора асинхронного двигателя и преобразователя. Электромеханический каскад характерен тем, что момент на валу производственного механизма создается совместно асинхронным двигателем и дополнительной машиной постоянного тока, в то время как у электрического каскада этот момент создается только главным асинхронным двигателем.
Стробоскопический метод удобен для определения скольжения асинхронных двигателей по отношению к синхронной скорости. При определении скольжения вместо применения специального диска достаточно на поверхность соединительной муфты параллельно оси равномерно нанести мелом ряд полос по числу гюлюсов двигателя.
Типы асинхронных двигателей
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида: двигатели постоянного тока двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками. Простой двигатель имеет 2 положения ротора (2 “мёртвые точки”), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные
– электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные
– замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).
Синхронный
– двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше). Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя. Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный
– двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин – индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями. Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.