
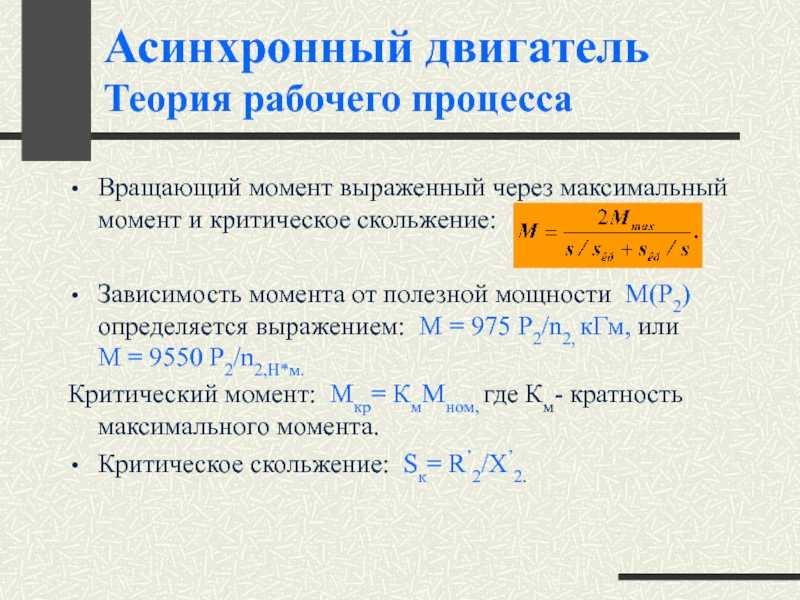
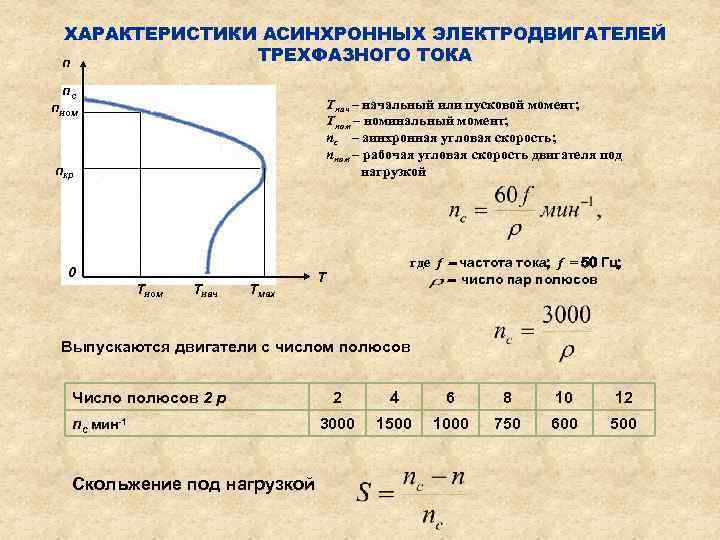
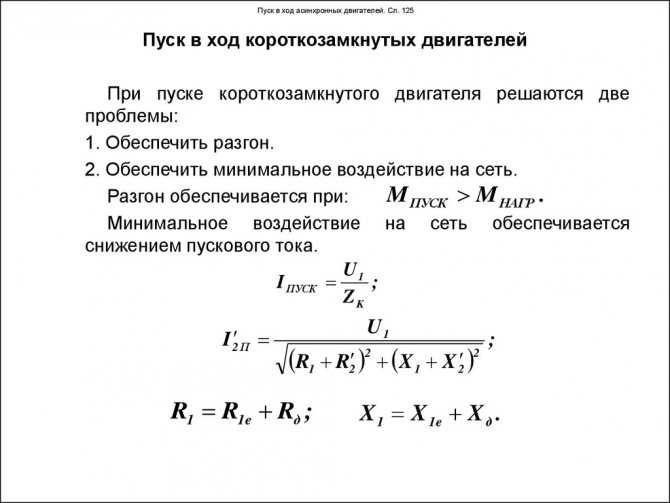
Какие показатели определяют пусковые свойства асинхронных двигателей
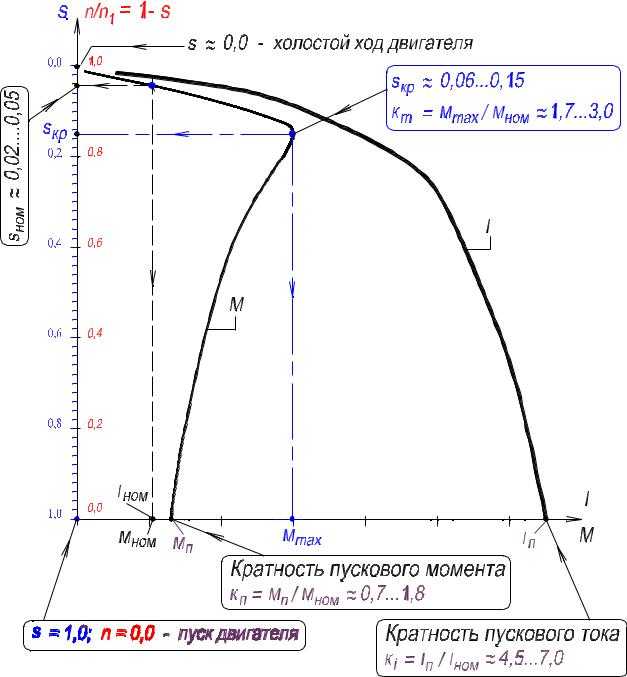
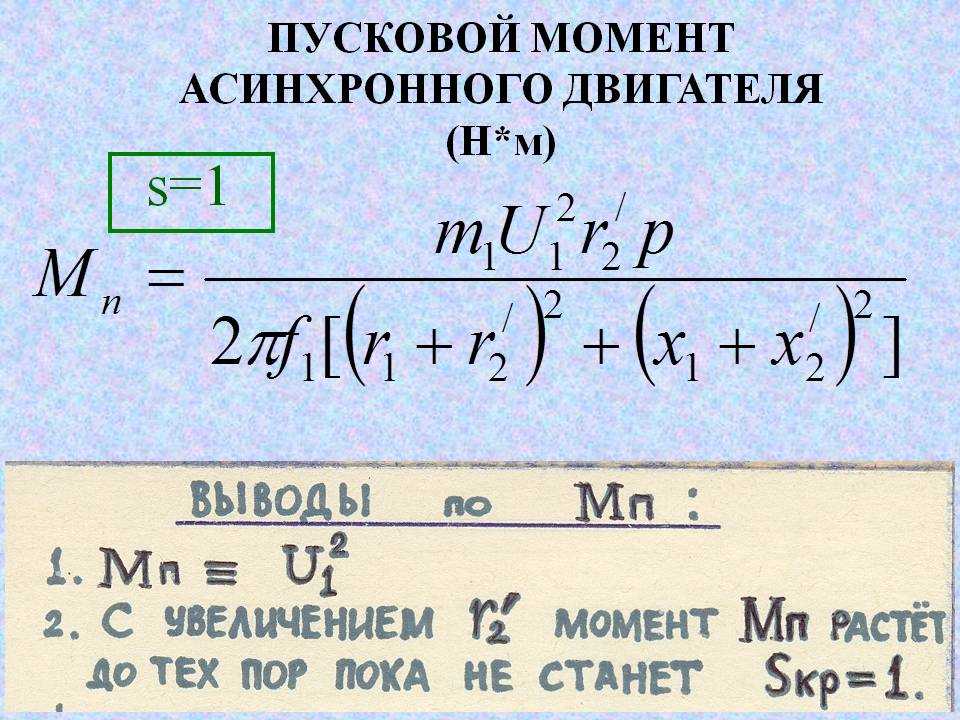
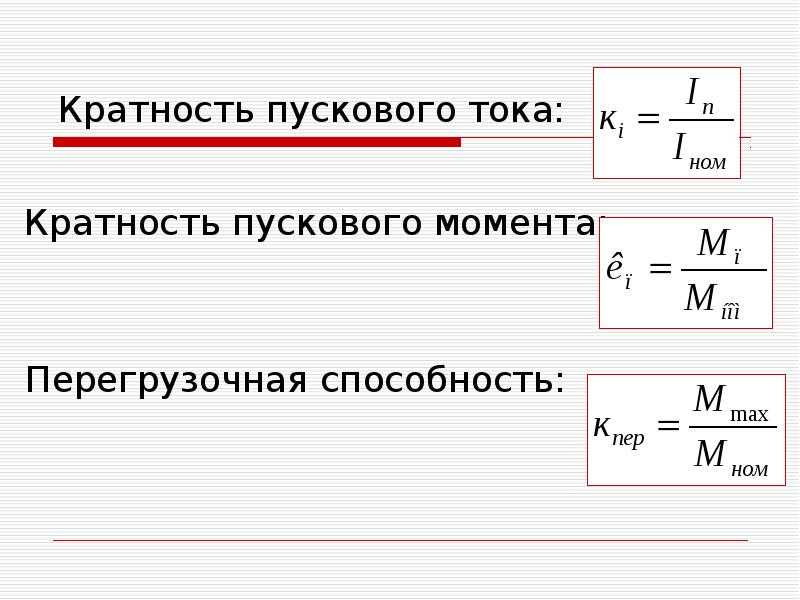
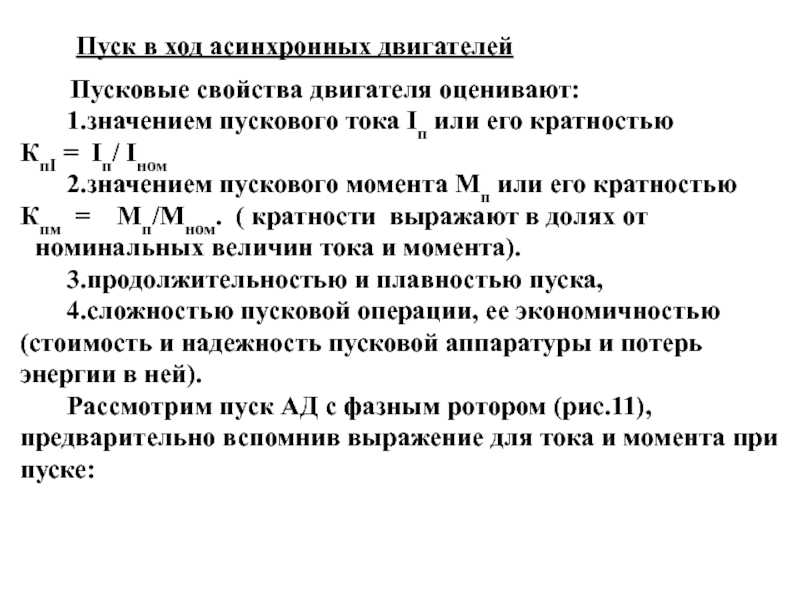
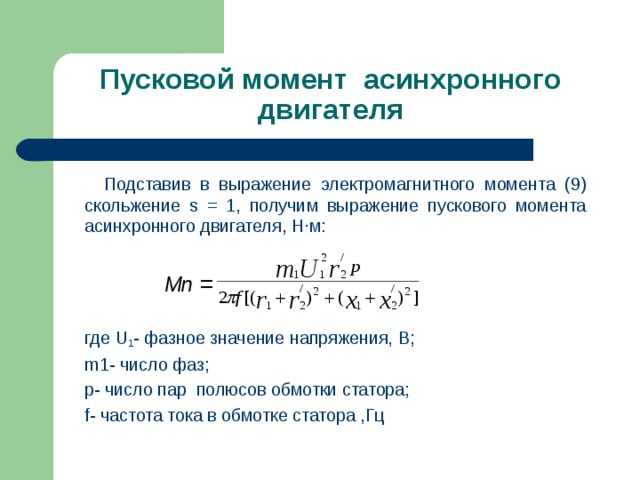
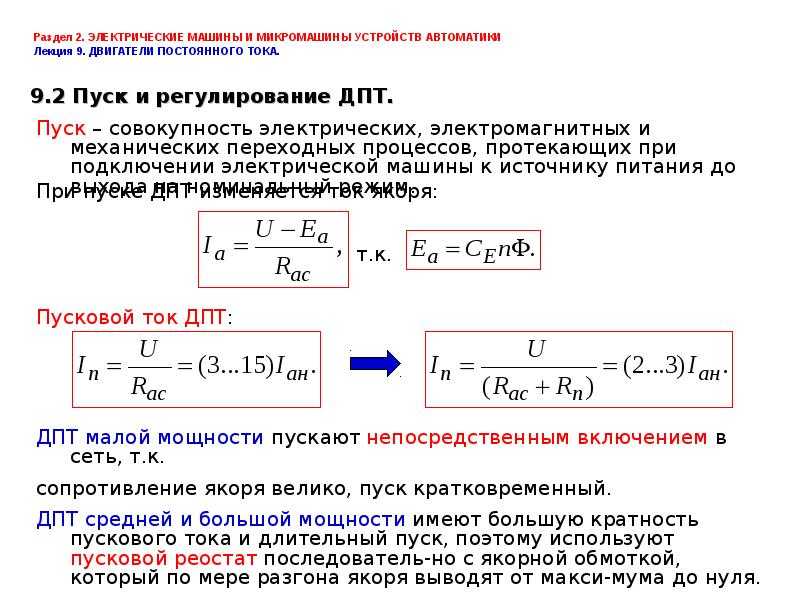
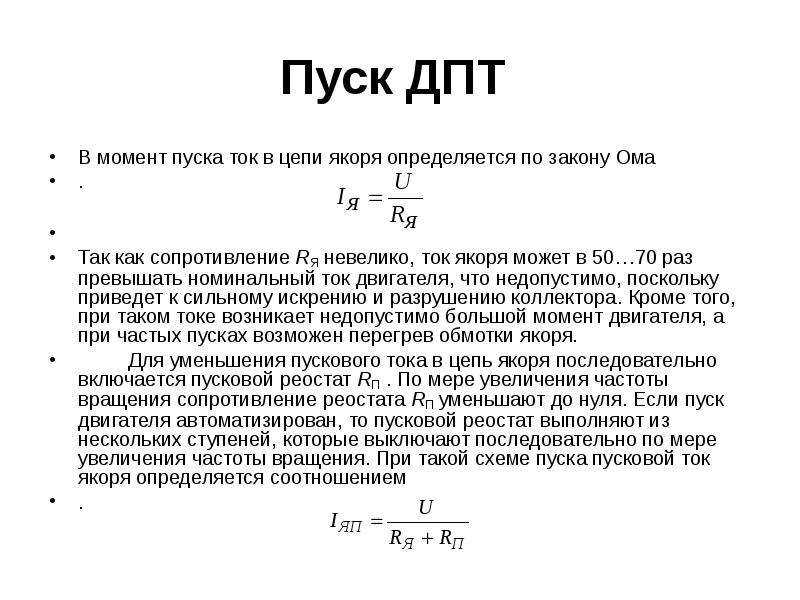
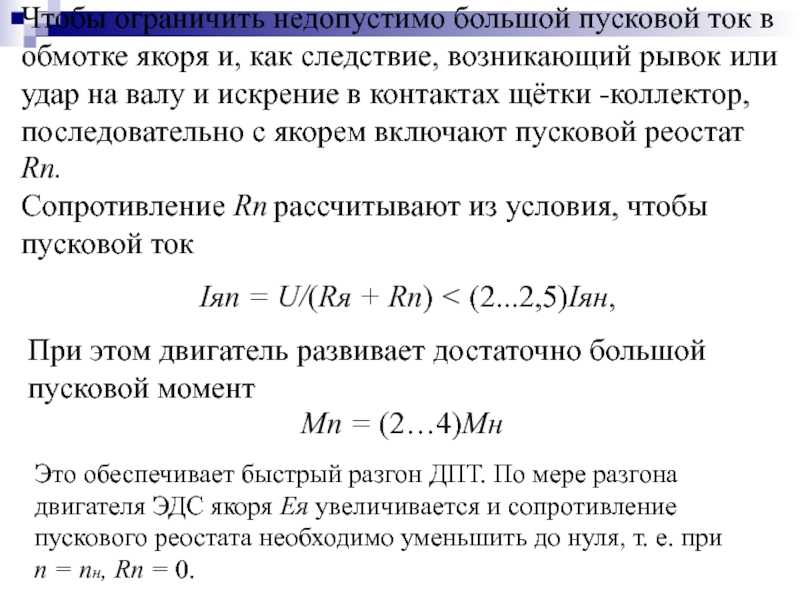
Пусковые свойства двигателя определяются в первую очередь значением пускового тока Iп или его кратностью Iп/ Iном и значением пускового момента Мп или его кратностью Мп/Мном. Двигатель, обладающий хорошими пусковыми свойствами, развивает значительный пусковой момент при сравнительно небольшом пусковом токе. Однако получение такого сочетания пусковых параметров в асинхронном двигателе сопряжено с определенными трудностями. В начальный момент пуска скольжение s = 1, поэтому, пренебрегая током х.х., пусковой ток можно определить подставив s = 1:
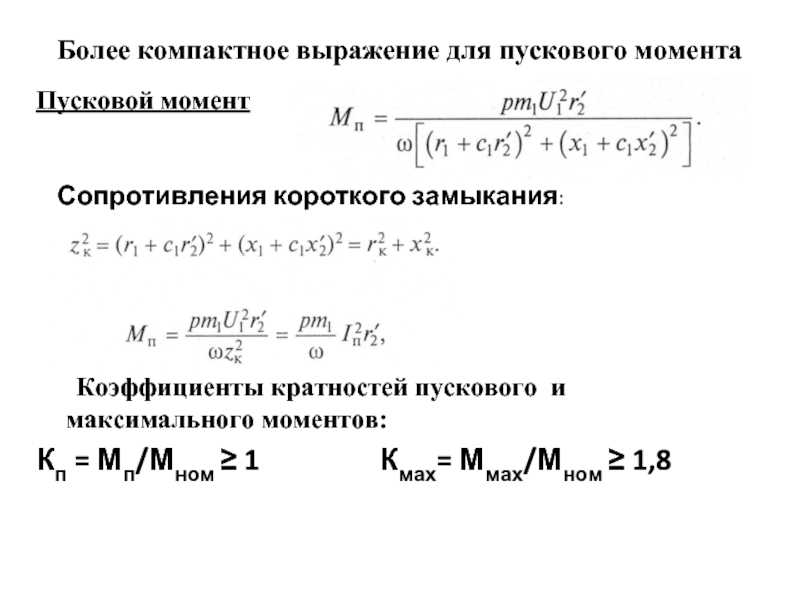
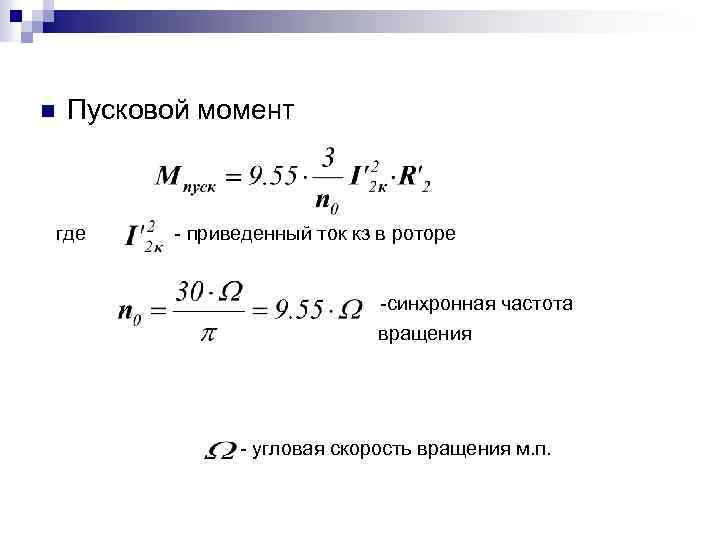
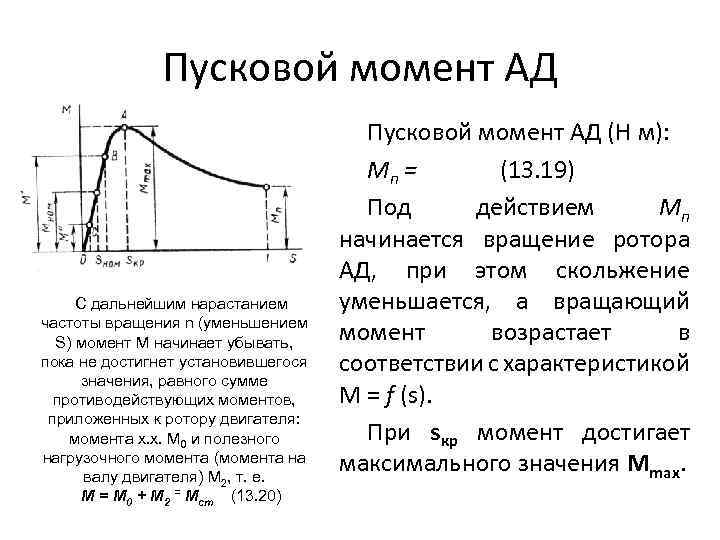
Iп=U1 Пусковой момент по
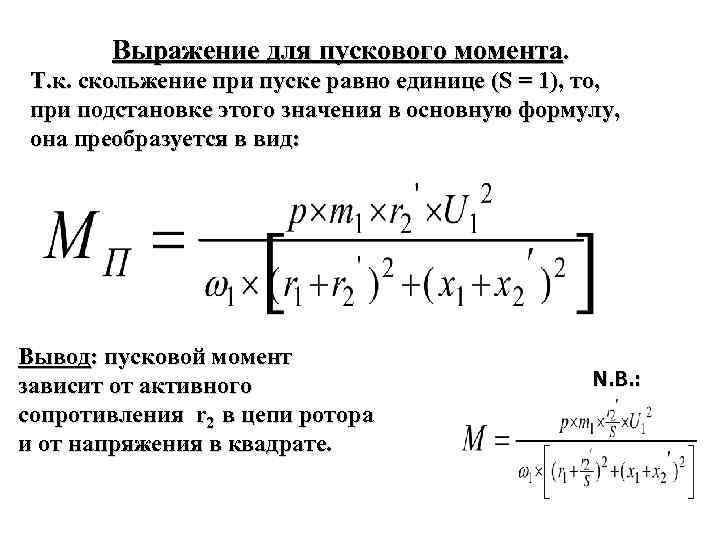
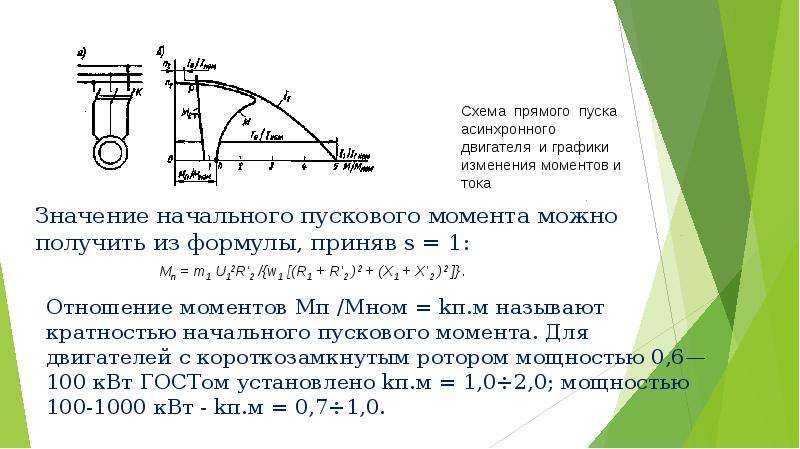
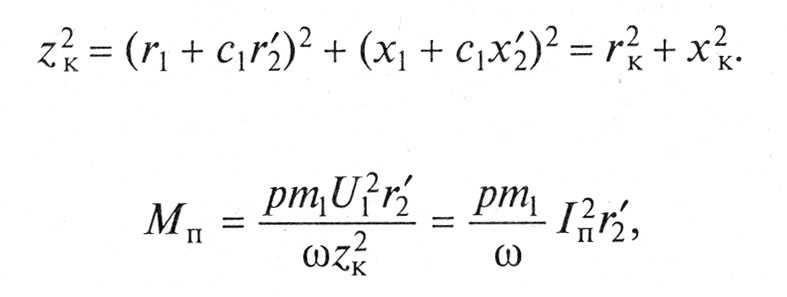
Mп= Улучшить пусковые свойства двигателя можно увеличением активного сопротивления цепи ротора r2′, так как в этом случае уменьшение пускового тока сопровождается увеличением пускового момента. В то же время напряжение U1 по-разному влияет на пусковые параметры двигателя: с уменьшением U1 пусковой ток уменьшается, что благоприятно влияет на пусковые свойства двигателя, но одновременно уменьшается пусковой момент. Целесообразность применения того или иного способа улучшения пусковых свойств двигателя определяется конкретными условиями эксплуатации двигателя и требованиями, которые предъявляются к его пусковым свойствам. Помимо пусковых значений тока Iп и момента Мп пусковые свойства двигателей оцениваются еще и такими показателями: продолжительность и плавность пуска, сложность пусковой операции, ее экономичность (стоимость и надежность пусковой аппаратуры и потерь энергии в ней).
Время действия и величина пускового тока
Длительностью пускового тока будем считать время, в течение которого ток понижается от максимума (Iп) до номинала (Iн). Эта длительность фактически равна времени разгона от нуля до номинальной скорости вращения.
Весь вопрос в том, какова длительность этого тока – 10 миллисекунд (пол периода), когда двигатель на холостом ходу, или 10 секунд, когда на валу массивная крыльчатка. Теоретически рассчитать это время невозможно. Однако, поделюсь некоторыми соображениями.
Как я говорил выше, ток двигателя при пуске может превышать норму в несколько раз (Кп). И некоторые начинающие электрики, которые не читают мой блог, считают, что защитный автомат нужно выбирать так же – на повышенный ток. В статьях и даже инструкциях пишут, что “При выборе автомата необходимо учитывать, что пусковой ток асинхронного электродвигателя в 5 – 7 раз превышает номинальный”. Как это учитывать? Неужели ток автомата выбирать в 5-7 раз выше номинального тока двигателя?
Пример:

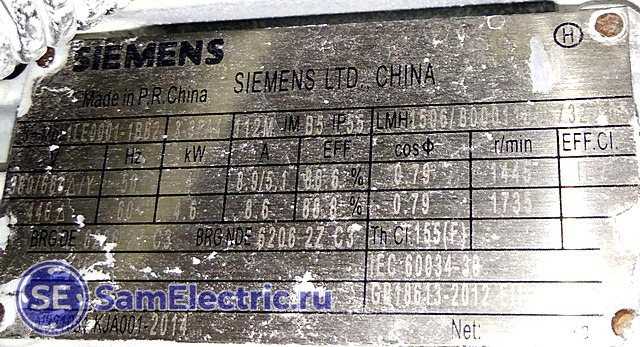
Шильдик китайского электродвигателя 30 кВт
Написано – 56 А. Что это значит? Неужели то, что ток защитного автомата должен быть более 300 А? Конечно, нет. И выбор автомата в данном случае зависит не только от номинального тока двигателя (56 А), но и от времени действия пускового тока.
Пусковой ток является максимально возможным током. Максимальным ток будет при пуске, то есть тогда, когда двигатель стоит. То есть, пусковой ток есть ВСЕГДА, и всегда его начальное значение имеет запредельную величину. В случае с нашим китайским движком – 392 А, если принять ток КЗ питающей сети равным бесконечности (источник напряжения с нулевым внутренним сопротивлением).
Подробно про статор
Статор это неподвижная часть электродвигателя, что отражено в его названии. Как правило, выполнен в виде цилиндра и закреплен к бетонному основанию пола.
Конструкция статора
Конструкция статора состоит из чугунного или алюминиевого корпуса, выполняющего роль жесткого элемента, внутри которого находятся медные обмотки, которые создают магнитное поле и сердечники из стали, которые являются его проводником.
На корпусе имеются ребра жесткости, выполняющие также функцию дополнительных охлаждающих . Материал корпуса выбран как слабопроницаемый для магнитного поля, чтобы работа магнитных полей не нарушалась электромагнитными помехами извне, и сама не создавал помехи.Сердечник представляет собой цилиндр, который состоит из стальных тонких спрессованных листов. Такая конструкция препятствует вихревым токам внутри сердечника, возникающим в процессе перемагничивания переменным электрическим напряжением.
Описание расположения обмоток статора
Обмотки статора это медные проводники, уложенные внутри статора так, что образуют индуктивные катушки, которые при подключении к разным фазам, создают разные магнитные поля.
Рассмотрим создание переменного магнитного поля в самом простом варианте, в двигателе с одной парой полюсов.У статора, в клеммной коробке имеется шесть проводов. Три провода это начала трех обмоток, и три провода это вывода с этих трех обмоток.
На чертеже видно эти шесть подходящих проводов. Три провода (С1, С2, С3) это начала обмоток, другие три провода (С4, С5, С6) это их окончания. Для удобства восприятия их всех пометили разными цветами.
На чертеже отображено минимальное количество катушек равное шести. По две катушки на одну фазу. Части обмоток, которые располагаются под цифрами, располагаются в пазах статора. Это схема, в реальности длина проводов в пазах на порядок больше.
На статоре, катушки подключенные к одной фазе располагаются одна напротив другой. Жирными точками отображены прохождения проводов обмотки в пазах статора.
Описание принципа создания вращающегося магнитного поля
В электродвигателе каждая катушка, находящаяся под напряжением, создает свое магнитное поле. Поскольку электрический ток является переменным, то и токи в каждой катушке в разные моменты времени изменяются от максимального положительного направления до максимального отрицательного.
Такой ток вызывает соответствующее переменное магнитное поле, которое суммируясь с магнитными полями всех катушек остальных фаз преобразуется во вращающееся поле статора, вокруг оси двигателя.
Это вращающее поле входит во взаимодействие с ротором, который индуцирует свое собственное магнитное поле. При движении поля статора, ротор приходит во вращательное движение. Это происходит из-за полей, которые взаимно отталкиваются.На чертеже тремя цветами показано, как располагаются разные обмотки подключенные к разным фазам. Контур образованный проводами, проходящими через пазы 1-16 называется катушкой.
Как правило, катушка образована большим количеством проводов, для усиления магнитного поля. Четыре катушки с пазами 1-16, 2-15, 3-14, 4-12 называются катушечной группой. Косыми черточками показаны переходы из одной катушки в другую.
Выводные концы обозначают буквой С и выводят их в клеммную колодку двигателя.
Магнитное поле для одного из полюсов создается проводами всех катушек в определенной катушечной группе. Это магнитное поле и называется полюсом электродвигателя. Их считают парами. В самом простом случае, электродвигатель бывает двухполюсным, как изображен на гифке выше.
Часто применяются также двухпарнополюсные (частота вращения ротора 1500 оборотов в минуту) и трехпарнополюсные двигатели (частота вращения ротора 1000 оборотов в минуту).
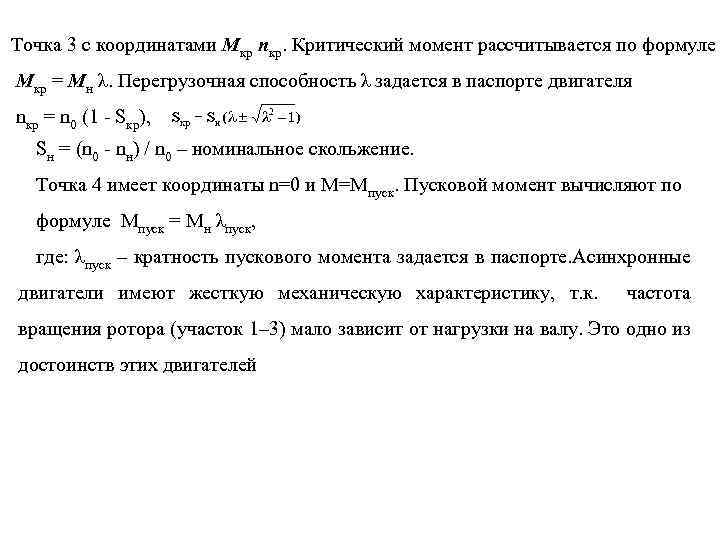
Критический момент асинхронного двигателя пропорционален формула
Эквивалентная схема асинхронного электродвигателя, рассмотренная в предыдущей статье, дает возможность получить выражение электромагнитного момента, который развивает асинхронный электродвигатель. Мощность, которая потребляется электрической машиной из сети, будет расходоваться не только на полезную работу, но и потери в контуре намагничивания и в обмотках.


Поэтому выражение мощности будет иметь вид:
На основании формулы (1) можно получить такое уравнение:
В свою очередь мощность электромагнитную можно выразить и таким способом:
Из выше перечисленных уравнений можем получить значение электромагнитного момента:
Помножив знаменатель и числитель этого выражения на S 2 и в целях упрощения вида уравнения примем значение Хк = Х1 + Х2 / . Хк – сопротивление индуктивное асинхронного электродвигателя при коротком замыкании:
Для упрощения записи, как в равенстве (5), индекс «эм» будет пропускаться.
Момент электромагнитный асинхронной машины представляет собой довольно сложную функцию скольжения S. Для того, чтоб найти максимум момента асинхронной машины приравняем производную S нулю:
Производная станет равна нулю только в том случае, если стоящий в скобках числителя множитель равен будет нулю:
Откуда можно выразить скольжение:
Sк называют критическим, так как при переходе S = Sк момент двигателя уменьшится. Это происходит из-за того, что при увеличении роторного тока (S > Sк) его активная часть не вырастет, а наоборот, уменьшится, что в свою очередь приведет к снижению момента.
Если Sк положительно – это режим работы двигательный, а если отрицательный – генераторный.
В асинхронных машин большой мощности r1 значительно меньше, чем Хк, и, как правило, лежит в пределах r1 = 0,1 – 0,12Хк. Поэтому величина r1 2 существенно мала, по сравнению Хк, и ею можно пренебречь без ущерба для точности:
Подставив положительные значения Sк (6) в выражение (5), найдем значение критического момента для двигательного режима:
Раскрыв скобки в знаменателе (8) и сократив дробь величине Мкд получим:
Для машин большой мощности для которых величиной r1 можно пренебречь выражение (9) примет вид:
Аналогичным образом получается значение критического момента для генераторного режима:
Отношение моментов генераторного и двигательного режимов работы АД:
Поделив числитель и знаменатель на и обозначив соотношение выражение (12) примет вид:
Также ε можно еще выразить как:
Так как асинхронные электродвигатели обычно имеют r1 ≈ r2 / , то приближенно можем принять:
Из выражений (12) и (13) можно увидеть, что в генераторном режиме значение критического момента будет больше, чем в двигательном. Это объясняется влиянием падения напряжения в активном сопротивлении статорной обмотки.
Отношение момента электромагнитного, к его критическому значению в двигательном режиме Мдк = Мк, будет иметь вид:
Данное выражение представляет собой уточненное уравнение механической характеристики асинхронного электродвигателя.
Если принять, как это делалось выше, r1 = 0, то тогда ε = 0 и взамен (15) получим упрощенное уравнение для механической характеристики:
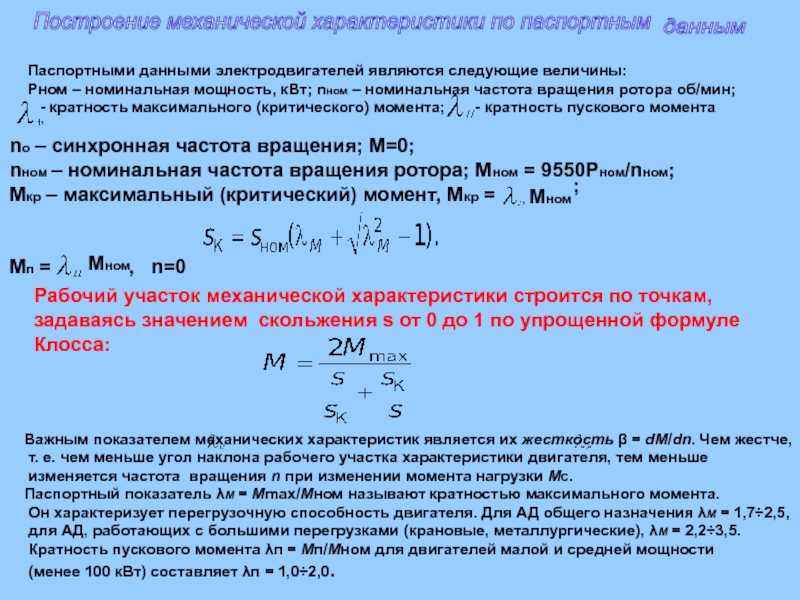
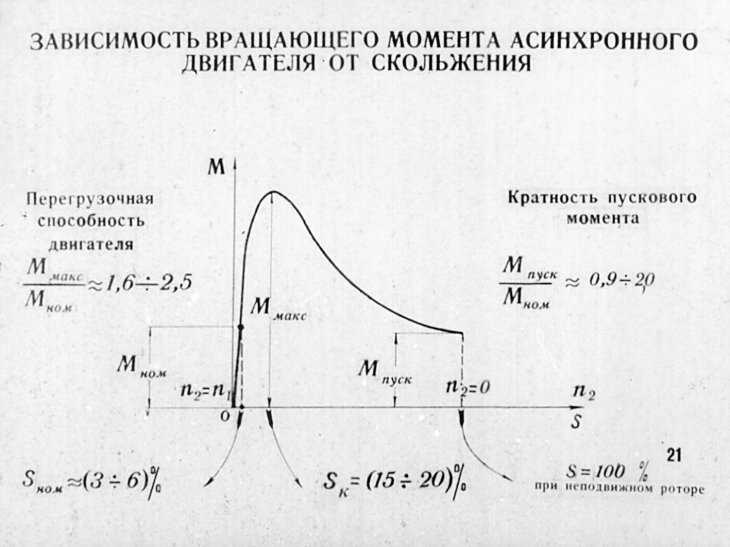
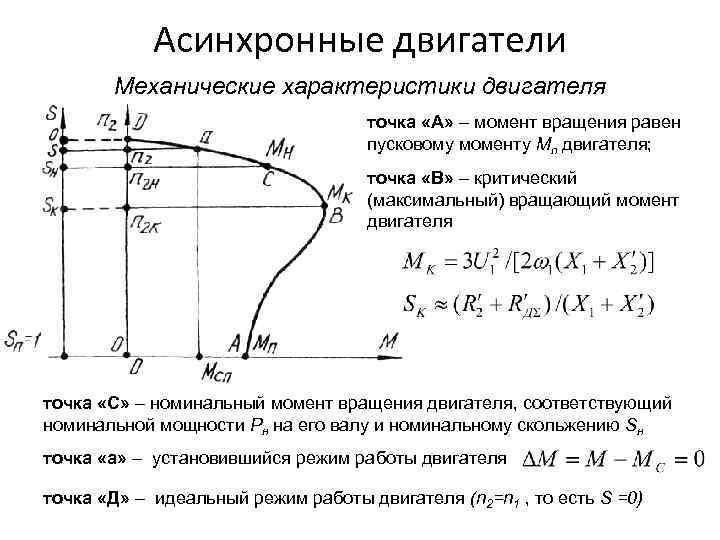
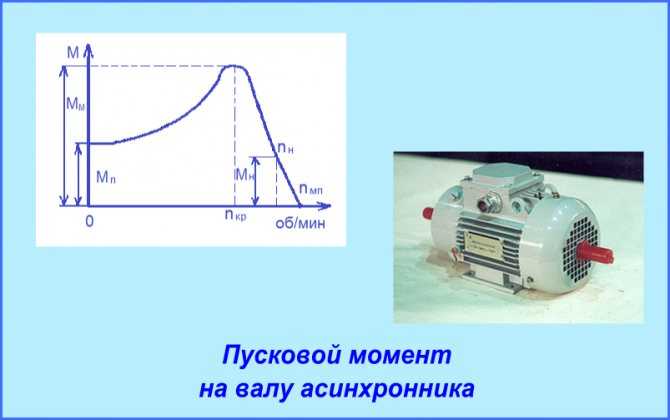
М, выраженный формулами (5), (15) и (16), является функцией скольжения S. Задаваясь различными значениями скольжения S можно построить механическую характеристику асинхронной машины.
Ниже показана механическая характеристика построенная по формуле (15):
Для машин асинхронных трехфазных с короткозамкнутым ротором общего применение мощностью 0,6 – 100 кВт соотношение должны лежать в пределах 1,7 – 2,2; причем большее значение соответствует большей скорости вращения ротора 3000 об/мин, а меньшее — 750 об/мин. Для машин мощность свыше 100 кВт должны иметь λм = 1,7 – 1,8. Для крановых и металлургических:
Реальные измерения тока
Как я говорил выше, по моему мнению лучший способ “увидеть” пусковой ток – использовать активный (резистивный) шунт, и смотреть на нём напряжение осциллографом.
Я использовать вот такой шунт:

Шунт для измерения пускового тока при помощи осциллографа
Подопытный – мотор-редуктор, который через цепную передачу крутит вертикальный шнек:

Мотор-редуктор, на котором измеряем пусковой ток
Шнек на момент пуска был полным, поэтому его рабочий ток (7,7 А, измерено клещами) был почти равен номинальному (8,9 А, видно на шильдике).
Шильдик двигателя вертикального шнека
Ситуация по пусковому току видна на осциллографе:
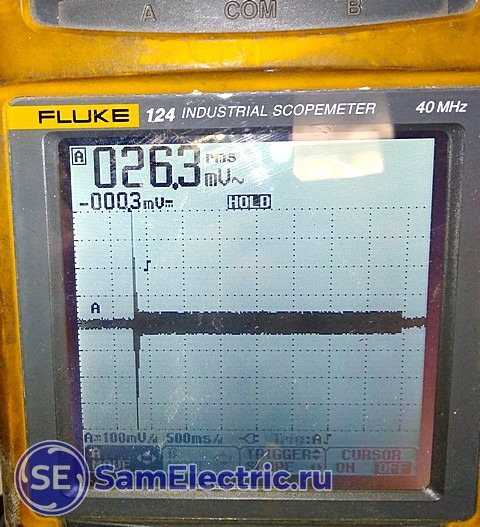
Осциллограмма пускового тока 500 мс/дел
Приблизим интересующий момент, ускорив развертку до 100 мс/дел:
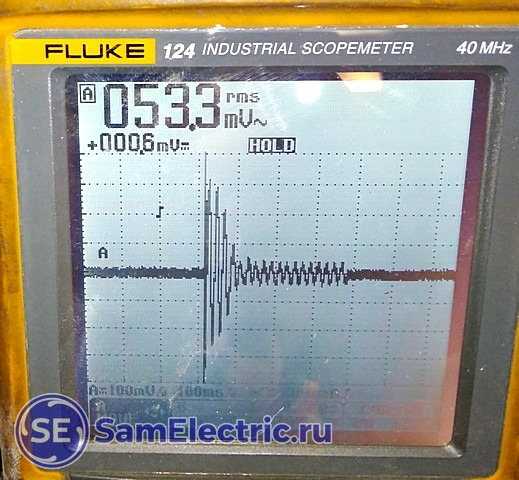
Осциллограмма пускового тока 100 мс/дел
Тут уже легко увидеть синус питающего тока и оценить коэффициент кратности пускового тока Кп, который примерно равен 4.
Ещё приблизим момент истины (до 50 мс/дел):
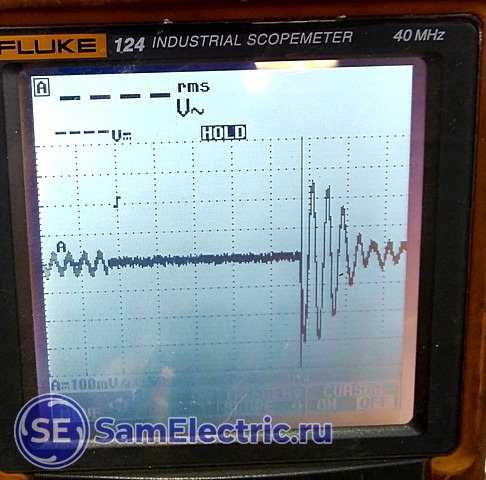
Момент пуска двигателя – ток пуска
Тут уже видны хорошо и переходные процессы, обусловленные индуктивностью и ЭДС самоиндукции обмоток двигателя. Этот импульс, длительность которого гораздо меньше периода сети 20 мс, даёт хорошую помеху с широким спектром в питающую сеть и радиоэфир.
На что влияет мощность и крутящий момент?
Мощность преодолевает силу трения в движке, приводах и трансмиссии, аэродинамические нагрузки, а также силу качения колес. Чем больше мощность силового агрегата, тем лучше автомобиль сопротивляется этим силам, а соответственно способен достигать большей скорости.

При движении автомобиль преодолевает силу трения в движке, приводах, трансмиссии и т.д.
Но мощность зависит от оборотов движка – на холостом ходу она значительно меньше, нежели на максимальных оборотах. Как правило, производители указывают какого числа оборотов нужно достичь, чтобы получить максимальную мощность.
Сразу при старте большую мощность развить невозможно, так как в начале движения автомобиль работает на малых оборотах. Движок выдает полную мощность только по истечении некоторого времени, которое определяет крутящий момент. Другими словами он определяет то, как быстро автомобиль будет набирать обороты. А от числа оборотов, которое выдает двигатель, зависит запас его силы.
К примеру, если максимальное число оборотов составляет 6000, то за счет большего запаса, педаль газа будет уже не так легко вжиматься в пол. Но с другой стороны двигатель будет дольше набирать все эти обороты, а значит медленнее развивать скорость. А чем выше будет крутящий моменту двигателя, тем стремительнее будут набираться обороты и «лошадиные силы» будут более ощутимы при нажатии на педаль газа.
Бывает, что и при высоком значении крутящего момента автомобиль разгоняется медленно. Это связано с тем, что движку нужно набрать определенное число оборотов, а после их достижения включается его максимальный крутящий момент. Он позволяет двигателю быстрее реагировать на действия водителя.
Но зависимость крутящего момента от мощности
есть, потому что мощность характеризует непосредственно работу движка, а точнее – количество совершенных силовым агрегатом крутящих моментов за определенную единицу времени. То есть крутящий момент – это та самая работа двигателя.
Синхронные и асинхронные электромашины
Двигатели переменного напряжения есть трёх типов: синхронные, угловая скорость ротора которых совпадает с угловой частотой магнитного поля статора; асинхронные – в них вращение ротора отстаёт от вращения поля; коллекторные, конструкция и принцип действия которых аналогичны двигателям постоянного напряжения.
Синхронная скорость
Скорость вращения электромашины переменного тока зависит от угловой частоты магнитного поля статора. Эта скорость называется синхронной. В синхронных двигателях вал вращается с той же быстротой, что является преимуществом этих электромашин.
Для этого в роторе машин большой мощности есть обмотка, на которую подаётся постоянное напряжение, создающее магнитное поле. В устройствах малой мощности в ротор вставлены постоянные магниты, или есть явно выраженные полюса.
Скольжение
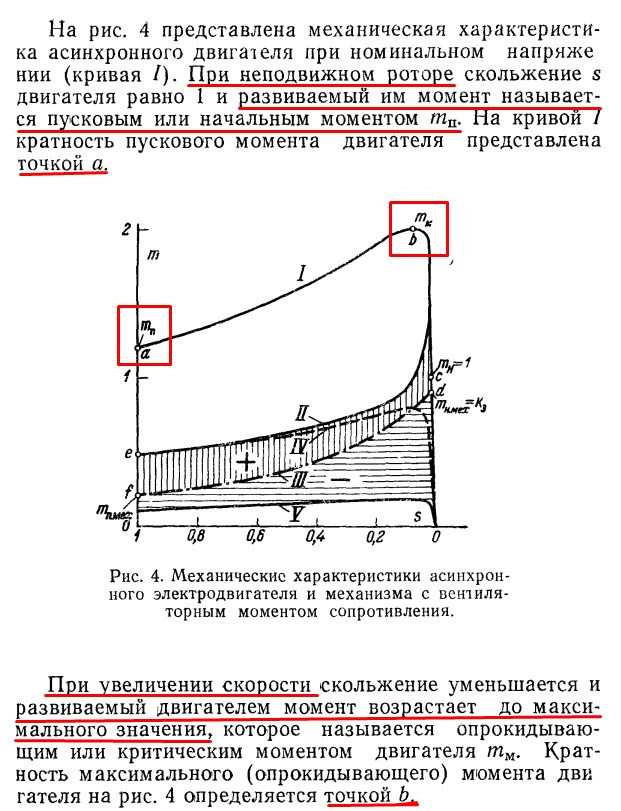
В асинхронных машинах число оборотов вала меньше синхронной угловой частоты. Эта разница называется скольжение «S». Благодаря скольжению в роторе наводится электрический ток, и вал вращается. Чем больше S, тем выше вращающий момент и меньше скорость. Однако при превышении скольжения выше определённой величины электродвигатель останавливается, начинает перегреваться и может выйти из строя. Частота вращения таких устройств рассчитывается по формуле на рисунке ниже, где:
- n – число оборотов в минуту,
- f – частота сети,
- p – число пар полюсов,
- s – скольжение.
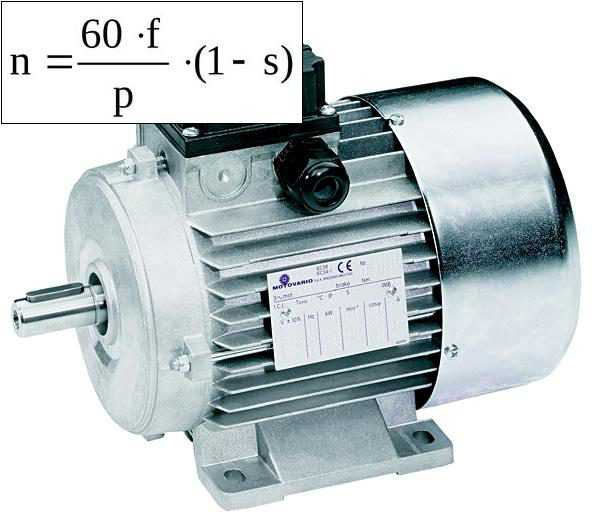
Формула расчёта скорости асинхронного двигателя
Такие устройства есть двух типов:
- С короткозамкнутым ротором. Обмотка в нём отливается из алюминия в процессе изготовления;
- С фазным ротором. Обмотки выполнены из провода и подключаются к дополнительным сопротивлениям.
Регулировка частоты вращения
В процессе работы появляется необходимость регулировки числа оборотов электрических машин. Она осуществляется тремя способами:
- Увеличение добавочного сопротивления в цепи ротора электродвигателей с фазным ротором. При необходимости сильно понизить обороты допускается подключение не трёх, а двух сопротивлений;
- Подключение дополнительных сопротивлений в цепи статора. Применяется для запуска электрических машин большой мощности и для регулировки скорости маленьких электродвигателей. Например, число оборотов настольного вентилятора можно уменьшить, включив последовательно с ним лампу накаливания или конденсатор. Такой же результат даёт уменьшение питающего напряжения;
- Изменение частоты сети. Подходит для синхронных и асинхронных двигателей.
Внимание! Скорость вращения коллекторных электродвигателей, работающих от сети переменного тока, не зависит от частоты сети
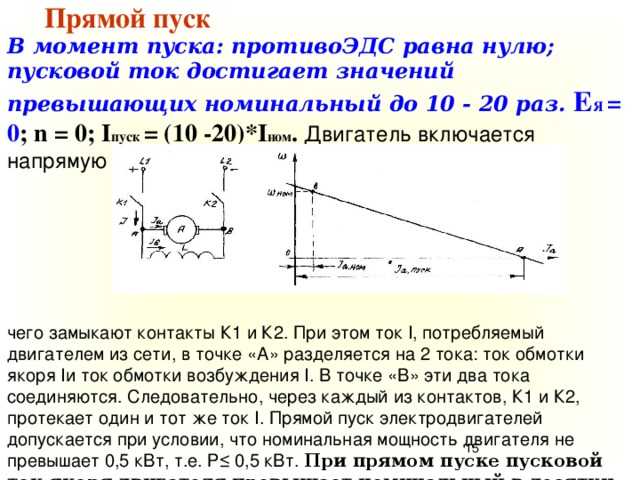
Пусковые режимы электрических моторов
Существуют и применяются на практике разные пусковые режимы асинхронных электродвигателей. Каждый имеет свои плюсы и минусы в зависимости от технических характеристик моторов и нагрузки.
Выбор конкретного режима пуска определяется электрическими, механическими, экономическими факторами. Вид управляемой нагрузки, также является важным фактором выбора режима запуска. Рассмотрим наиболее часто практикуемые варианты пусков.
Пусковые режимы свободно вращающегося мотора
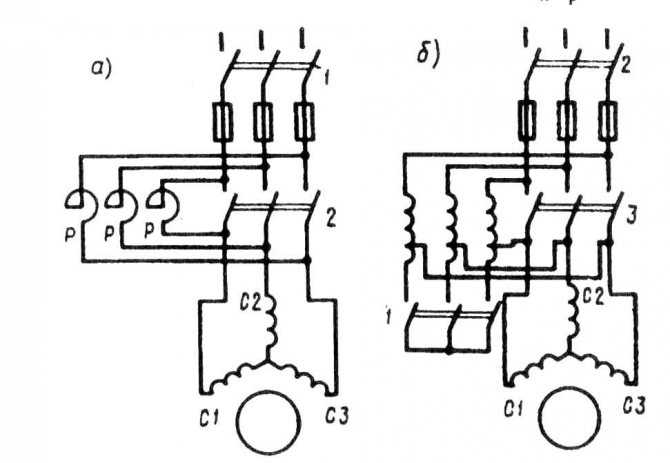
Этот режим пуска асинхронного электродвигателя видится самым простым из всех существующих схем. Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
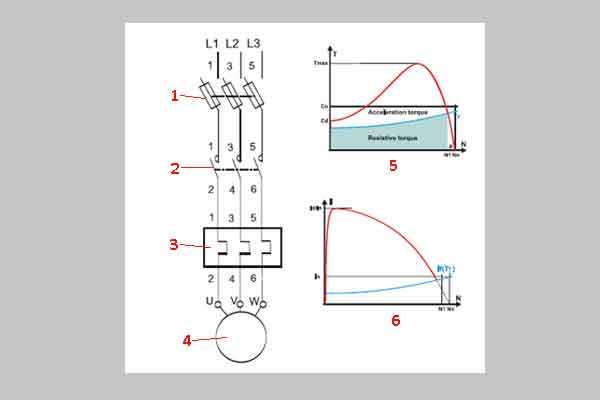
Схема на прямые пусковые режимы электродвигателя: 1 — колодка предохранителей; 2 — контактор; 3 — биметаллическое реле; 4 — мотор; 5, 6 — кривые состояния в момент старта
Когда имеет место момент включения, электрический мотор, в данном случае, работает подобно вторичной обмотке трансформатора. Пусковые режимы здесь характеризуются короткозамкнутым ротором, имеющим крайне малое сопротивление.
На роторе формируется высокий индуцированный ток, превышающий в 5-8 раз номинальный параметр, за счёт чего возрастает пиковый ток в сети питания. Среднее значение пускового момента при этом составляет 0,5-1,5 от номинала.
Несмотря на явные преимущества (простая схема, высокий пусковой момент, быстрый старт, экономия), режим прямого пуска асинхронных моторов видится разумным лишь в следующих обстоятельствах:
- мощность электродвигателя низка по сравнению с мощностью сети и не создаёт помехи от пускового тока;
- привод не нуждается в плавном разгоне или имеет демпфирующее устройство, ограничивающее удар при запуске,
- пусковой момент не влияет на работу ведомой машины или нагрузку, приводимую в движение.
Пусковые режимы переключением «звезда-треугольник»
Вариант с переключением схемы обмоток применим только на электродвигателях, где начальные и конечные проводники всех трёх обмоток статора выведены на клеммы БРНО. Кроме того, обмотка мотора должна иметь исполнение, когда соединение треугольником соответствует сетевому напряжению.
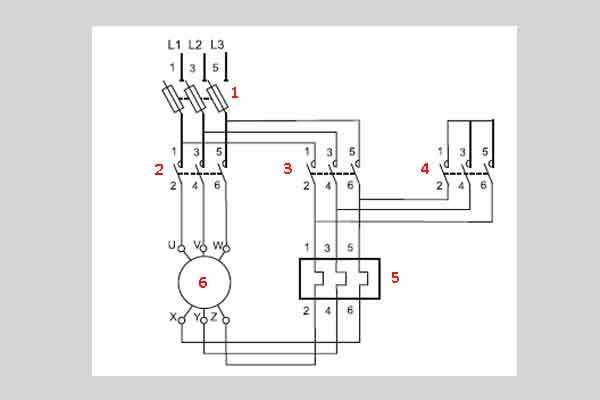
Схема старта «звезда-треугольник»: 1 — предохранители; 2 — контактор 1; 3 — контактор 2; 4 — контактор 3; 5 — биметаллическое реле защиты; 6 — мотор
Например, для 3-фазной линейной сети 380В подойдёт электродвигатель с параметрами обмотки 380В – «треугольник» и 660В — «звезда». Принцип на пусковые режимы асинхронного электродвигателя для этого варианта — старт мотора звездообразным подключением обмотки к сетевому трёхфазному напряжению. Здесь теоретически номинальное напряжение «звезды» электродвигателя делится на корень квадратный из 3 (380В = 660В / √3). Пик пускового тока также делится на 3 и составит:
ПТ = 1,5 — 2,6 НТ (номинальный ток)
Электродвигатель с обмоткой под напряжения 380В / 660В, под номинальное напряжение 660В, потребляет меньше тока в 3,3 раза, чем на соединении «треугольник» при напряжении 380В. В режиме соединения «звездой» при напряжении 380В, ток вновь делится на √3, учитывая наличие 3 фаз. Поскольку пусковой момент (ПМ) пропорционален квадратуре значения питающего напряжения, значение ПМ также делится на 3 и составит:
ПМ = 0.2 — 0.5 НПМ (номинальный пусковой момент)
Скорость электродвигателя стабилизируется при балансировке и резистивных крутящих моментах, как правило, на уровне 75-85% от номинальной скорости. Затем обмотки соединяются «треугольником», после чего электродвигатель восстанавливает рабочие характеристики.
Переход от соединения «звезда» на соединение «треугольник», как правило, контролируется таймером. Контактор «треугольника» закрывается спустя 30-50 миллисекунд после открытия контактора «звезды». Этой последовательностью предотвращается короткое замыкание между фазами.
Течение тока через обмотки нарушается, когда контактор «звезды» открывается и восстанавливается вновь, когда закрывается контактор «треугольника». В этот момент (сдвиг на «треугольник») формируется короткий, но сильный переходный пик тока по причине противоэлектродвижущей силы электродвигателя.


Каким моторам нужен пуск «звезда – треугольник»?
Пусковые режимы «звезда – треугольник» подходят для машин с низким резистивным крутящим моментом или когда старт выполняется без подключенной нагрузки. Для ограничения переходных явлений выше определенного уровня мощности, могут потребоваться дополнительные меры. Например, 1-2-секундная задержка на сдвиг от «звезды» к «треугольнику».
Как повысить мощность электродвигателя в домашних условиях
Итак, для проведения работ вам следует «вооружиться»:
Сначала необходимо подключить электродвигатель к имеющемуся у вас источнику тока и изменяемой ЭДС и увеличить ее значение
Напряжение в обмотках должно увеличиваться соответственно и поравняться со значением ЭДС (если не принимать во внимание потери в подводящих проводниках, но они незначительны)
Для расчета увеличения мощности двигателя определите значение увеличения напряжения и возведите эту цифру в квадрат. Например, если напряжение на обмотках выросло в два раза (со 110В до 220В), мощность двигателя увеличилась в четыре раза.
Иногда самый рациональный способ повысить мощность электродвигателя – перемотать обмотку. Во многих моделях это медный проводник. Вам следует взять провод из того же материала и той же длины, но большего сечения. Мощность двигателя (и ток в проводе) увеличатся во столько же раз, во сколько снизится сопротивление обмотки. Следите за тем, чтобы напряжение на обмотках оставалось неизменным.
Расчет в этом случае тоже достаточно прост. Разделите большую цифру сечения провода на меньшую. Если провод сечением 0.5 мм заменен проводом сечением 0.75 мм, показатель мощности вырастает в 1.5 раза.
Если вы включаете асинхронный трехфазный двигатель в однофазную бытовую сеть, на первую обмотку подается фаза, на второй фаза сдвигается конденсатором, на третьей сдвиг фаз отсутствует. Именно последняя обмотка создает момент вращения в противоположном направлении (тормозящий момент). Увеличить полезную мощность двигателя в этом случае можно путем отключения третьей обмотки. Это приведет к исчезновению тормозящего момента, генерируемого при работе всех обмоток, и, соответственно, повышению мощности. Данный метод удобен в том случае, когда одна обмотка у двигателя уже сгорела – двух оставшихся вам вполне хватит для подключения и обеспечения работы агрегата.
https://youtube.com/watch?v=b5oRtuniZeU
https://youtube.com/watch?v=0T7wvGysZBk
Пусковые токи асинхронных электродвигателей
Пусковым называется ток, необходимый для осуществления запуска электрического двигателя. Пусковые токи асинхронных электродвигателей обычно в несколько раз превышают показатели, достаточные для работы в нормальном режиме.
Пусковые токи асинхронных электродвигателей
Двигатели асинхронного типа в момент подключения к электросети потребляют значительное количество энергии для того, чтобы:
- привести ротор в движение;
- поднять скорость вращения с нуля до рабочего уровня.
Этим объясняется необходимость использования большого пускового тока, который существенно отличается от количества электроэнергии, позволяющего поддерживать постоянное число оборотов. Это характерно не только для асинхронных, но и для однофазных двигателей постоянного тока, хотя принцип действия последних совершенно иной.
Проблема высоких пусковых токов: решение
Высокий пусковой ток может спровоцировать резкое, хотя и кратковременное падение напряжения, при котором прочие подключенные к сети устройства испытают недостаток энергии. Это нежелательно, поскольку негативно влияет на безопасность работы и долговечность оборудования.
Для решения задачи предусмотрены специальные дополнительные устройства, установка которых в процессе подключения и наладки двигателей позволяет:
- максимально уменьшить значение пускового тока;
- повысить плавность запуска;
- снизить затраты на запуск агрегата, так как становится возможным применение менее мощных дизельных электростанций, стабилизаторов, проводов с меньшим сечением и пр.
Наибольшей эффективностью отличаются такие современные устройства, как частотные преобразователи и софтстартеры. Они обеспечивают высокую (более минуты) продолжительность поддержания пускового тока.
Как рассчитать пусковой ток электродвигателя
Чтобы объективно оценить сложность условий запуска двигателя, необходимо предварительно узнать величину необходимого для этого пускового тока. Основные этапы расчета следующие:
- вычисление номинального тока;
- определение значения пускового тока (в амперах).
Для того чтобы получить значение номинального тока для используемой модели электродвигателя, применяют формулу, которая имеет вид Iн=1000Pн / (Uн*cosφ*√ηн). Pн и Uн – это номинальные показатели мощности и напряжения, cosφ и ηн – номинальные коэффициенты мощности и полезного действия.
Собственно пусковой ток, который обозначается как Iп, определяется при помощи формулы Iп = Iн * Kп, где Kп – это кратность постоянного тока по отношению к его номинальному значению (Iн). Всю необходимую для проведения расчетов информацию (значения Kп, Pн, ηн, cosφ, Uн) можно найти в технической документации, которая прилагается к электродвигателю.
Корректный расчет пускового тока двигателя способствует правильному выбору автоматических выключателей, предназначенных для защиты линии включения, а также приобретению дополнительного оборудования (генераторы и пр.) с подходящими параметрами.
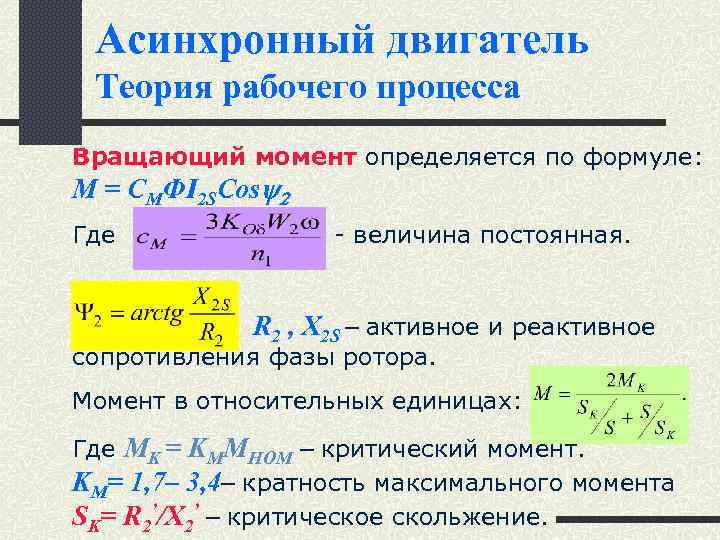
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.

В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M — крутящий момент, Нм;
F — прикладываемая сила, H;
Для расчета номинального вращающего момента привода используют формулу
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин -1 .
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.
Самая главная часть — это вал. Иначе, как бы происходило вращение?
На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.
Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.
Как вы можете далее заметить, в сердечнике ротора есть специальные пазы
В них вставляются медные или алюминиевые стержни,
которые замыкаются на кольцо с обеих сторон, образуя так называемую «беличью клетку».
В общем виде полностью собранный ротор асинхронного двигателя выглядит вот так.
А вот так он выглядит в реальном двигателе.
Всегда помните, что в асинхронном двигателе вращается ротор, а не статор. Статор — это неподвижная часть, а ротор — подвижная часть электродвигателя. В рабочем состоянии двигателя между ротором и статором всегда имеется воздушный зазор. При работе двигателя ротор ни в коем случае не должен задевать статор двигателя.
Как снизить вред от пускового тока?
Если изменить схему питания двигателя невозможно (например, сосед по даче каждые пол часа запускает токарный станок, а никакие “методы воздействия” не воздействуют), то можно применить различные методы минимизации вреда от пусковых токов. Например:
- На важные потребители или на весь дом установить инверторный ИБП (UPS), который будет держать напряжение в норме при любом раскладе. Самый дорогой, но действенный способ.
- Поставить стабилизатор напряжения. Но учтите, что не все стабилизаторы одинаково полезны. Иногда они могут не справляться, а иногда – даже усугублять ситуацию. Подробнее – по приведенной ссылке.
- Если питание – однофазное, то можно попробовать переключиться с “плохой” фазы на “хорошую”. Иногда этот способ так же эффективен, как использование телепорта вместо автобуса “Таганрог-Москва”.
Но напоминаю, что мы тут занимаемся не устранением последствий, а предотвращением проблем, поэтому погнали дальше.





