
Введение
С начала 2011 года на территории Российской Федерации введен национальный стандарт ГОСТ Р МЭК/ТС 60034-17-2009 «Машины электрические вращающиеся. Часть 17. Руководство по применению асинхронных двигателей с короткозамкнутым ротором при питании от преобразователей», который в полном объеме соответствует Европейскому стандарту IEC/TS 60034-17:2006 «Rotating electrical machines. Part 17. Application guide for cage induction motors when fed from converters».
Этот стандарт обобщает ряд исследований, проведенных МЭК по применению стандартных общепромышленных электродвигателей в составе частотно-регулируемого привода. В публикации ГОСТ Р МЭК /ТС 60034-17-2009 рассматриваются как инверторы тока (тирристорные преобразователи частоты), так и инверторы напряжения (преобразователи частоты с IGBT-транзисторами). Положения стандарта не относятся к применению элекродвигателей, специально разработанных для питания через преобразователь частоты и соответствующих МЭК 60034-25:2007 «Машины электрические вращающиеся. Часть 25. Руководство по конструкции и эксплуатационным характеристикам двигателей переменного тока, специально предназначенных для элекропитания через преобразователь.
В настоящей статье рассмотрены основные положения стандарта ГОСТ Р МЭК/ТС 60034-17-2009 и собственный опыт автора в применении к частотному регулированию асинхронных электродвигателей преобразователями частоты с широтно-импульсной модуляцией выходного напряжения.
Определение и принцип действия
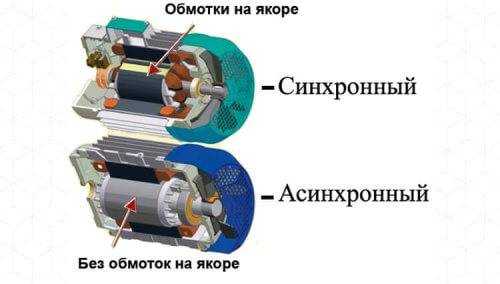
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
https://youtube.com/watch?v=9Ym38FxfqIQ
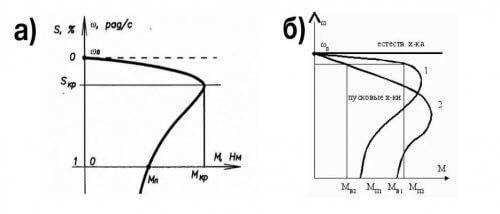
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
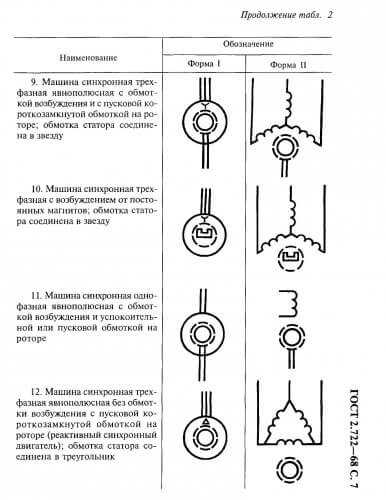
Ниже вы видите условное обозначение на схеме синхронной машины.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Асинхронные и синхронные двигатели: устройство
Электрические двигатели представляют собой агрегаты для преобразования электроэнергии в энергию механическую. Основу конструкции двигателя (как синхронного, так и асинхронного типа) составляют следующие элементы:
- неподвижный (статор);
- вращающийся (ротор).
Статоры электродвигателей обеих категорий имеют схожий принцип устройства. В специальные пазы (осевые прорези) уложены токонесущие проводки из меди или алюминия. Функцией статора является создание вращающегося магнитного поля. Ротор (с обмоткой возбуждения) закреплен на валу двигателя и вращается под воздействием возникающей электродвижущей силы.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
Способы регулирования скорости вращения асинхронного электродвигателя с фазным ротором.
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя: изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = nо (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет (рис. 3), а скольжение от Uрег не зависит.
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс>Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем, выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения изменением числа пар полюсов
Этот способ регулирования в отличие от предыдущего позволяет осуществить изменение частоты вращения только ступенями. Он используется в таких механизмах, как воздуходувки, транспортеры, подъемники, лифты. Двигатели с переключением числа пар полюсов называют многоскоростными. Обычно многоскоростные асинхронные двигатели выполняются с двумя, тремя и четырьмя ступенями скоростей. Двухскоростные двигатели изготавливаются с одной обмоткой, если числа пар полюсов соответствуют следующему отношению:. Трех- и четырехскоростные двигатели выпускаются с двумя обмотками. В трехскоростных двигателях только одна обмотка выполняется с переключением числа пар полюсов , а в четырехскоростных обе обмотки выполняются как двухскоростные. Обмотка ротора многоскоростных двигателей выполняется короткозамкнутой. Для нее не требуется переключения схемы соединения, так как необходимое число пар полюсов обмотки ротора образуется автоматически полем статора. Изменение числа полюсов осуществляется путем изменения схемы соединения секций обмотки статора. На рис. 4.29 показаны три варианта соединения секций.
Вариант «а» соответствует последовательному согласному включению секций, при этом образуется магнитное поле с полюсами. В варианте «б» вторая секция включается встречно-последовательно. Результирующее поле имеет полюса. Мощность обмотки остается неизменной, , а момент, развиваемый двигателем, снижается в два раза, . В варианте «в» вторая секция включается встречно-параллельно. Результирующее поле также будет иметь полюса, но мощность обмотки возрастает в два раза, а момент двигателя остается постоянным .
Таким образом, для изменения числа пар полюсов в отношении необходимо, чтобы каждая фаза обмотки состояла из двух одинаковых частей. Когда обе части обтекаются токами одинакового направления, число полюсов , при изменении направления тока в одной из них число полюсов уменьшается вдвое, . При переключении числа полюсов с на полюсное деление уменьшается в два раза, при этом величина фазной зоны трехфазной обмотки меняется с 60° на 120° (рис. 4.30).
Так как чередование фаз для обеих скоростей должно оставаться одинаковым, то кроме изменения направления токов в зонах необходимо поменять местами две фазы обмотки. При большем числе полюсов обмотка выполняется с диаметральным шагом . Тогда при меньшем числе полюсов . Малый шаг приводит к ухудшению использования обмотки и, следовательно, к некоторому снижению технико-экономических показателей двигателя.
Многоскоростные двигатели проектируются для различных режимов работы. Наиболее часто встречаются режимы с постоянным моментом и с постоянной мощностью . Регулирование частоты вращения с постоянным моментом обеспечивается при переключении обмотки со звезды на схему двойной звезды (рис. 4.31).
При таком переключении в два раза возрастает потребляемый из сети ток, а следовательно, и мощность двигателя , момент же при этом не меняется.
Если до переключения обмотка статора была соединена в треугольник (рис. 4.32), то после переключения ее на двойную звезду мощность двигателя практически не изменится, а момент уменьшится в два раза из-за увеличения частоты вращения.
Что представляет собой асинхронный электродвигатель?
К асинхронным принято относить электродвигатели, в которых частота вращения одного из ключевых элементов — ротора — не совпадает с частотой оборотов магнитного поля, формирующегося током, который возникает на обмотке статора. Асинхронные агрегаты иногда именуются индукционными. Это обусловлено тем, что в обмотке ротора осуществляется индуцирование тока при воздействии магнитного поля статора.

В конструкции асинхронного электродвигателя присутствуют статор и ротор, которые разделены воздушной прослойкой. Основные активные элементы агрегата:
Важную роль в функционировании асинхронного двигателя играют дополнительные конструктивные элементы, которые обеспечивают прочность, охлаждение и устойчивость работы агрегата.
Реакторный пуск
В этом случае двигатель пускается при пониженном напряжении сети с помощью реактора или трансформатора. Реакторный пуск рекомендуется в первую очередь и только при невозможности его использования допу-скается автотрансформаторный пуск.
Реакторный пуск синхронных компенсаторов ( рис. 5 — 1 ж), принятый сейчас как основной, применен для мощных машин.
Реакторный, или автотрансформаторный, пуск осуществляется подачей на обмотки электродвигателей напряжения, сниженного с помощью автотрансформатора или чаще всего реактора, которые отключаются при разгоне агрегата до подсин-хронной частоты вращения. При реакторных пусках снижаются момент, развиваемый двигателем при пуске, толчки и вибрации машины, потребляемая мощность, нагрев обмоток и падение напряжения и увеличивается время пуска.
Конденсаторный или реакторный пуск.
Пуск электродвигателей серии ВДС 325 — прямой асинхронный от сети, имеющей полное напряжение. Электродвигатели ВДС 325 имеют реакторный пуск от сети с пониженным напряжением.
Трехфазный асинхронный двигатель с кратностью начального пускового тока kj 5 6 и кратностью начального пускового момента kn — 1 3 пускается в ход при нагрузке Мв 0 5 Мн. Применим ли в этом случае реакторный пуск.
Дают возможность регулировании напряжения. При до-статичнои мощности подстанции возможен реакторный пуск или непосредственный пуск от шип.
Схема электрических соединений насосной станции должна обеспечивать прямой пуск асинхронных и синхронных электродвигателей от полного напряжения сети. Для мощных электродвигателей в соответствии с указаниями заводов-изготовителей может применяться реакторный пуск. Использование крупных синхронных электродвигателей для работы в компенсаторном режиме в перерывах водоподачи должно быть обосновано технико-экономическими расчетами.
|
Вспомогательная схема токовых цепей защит электродвигателей с реакторным пуском от многофазных КЗ. а — при применении токовой отсечки. б — при применении дифференциальной защиты. М — электродвигатель. L — пусковой реактор. Ql, Q2 — выключатели. ТА1 — ТАЗ — трансформаторы тока. АК1, АК2 — комплекты токовых отсечек. АК — комплект дифференциальной защиты.| Принципиальная схема дифференциальной защиты электродвигателя М с реле. |
Если применена дифференциальная защита, то в плече защиты со стороны питания с той же целью устанавливается двухфазная двухрелейная отсечка без выдержки времени, которая для повышения чувствительности выводится из действия на время пуска электродвигателя. На рис. 2.192 показаны блок-схемы токовых цепей защит электродвигателей с реакторным пуском.
Пуск синхронных компенсаторов осуществляется различными способами: асинхронный — непосредственно от сети, от разгонного двигателя, через автотрансформатор и через реактор; асинхронный пуск применяется только при малых мощностях компенсаторов. Наиболее простым способом пуска, чаще всего применяемым на практике, является реакторный пуск компенсатора. Синхронные компенсаторы типа КС до 30 000 ква включительно имеют воздушное охлаждение, а компенсатор типа КСВ-37500 ква — водородное охлаждение.
|
Прямая ( а и обратная ( б схемы включения пусковых автотрансформаторов. |
Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры. Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
|
Схема пуска синхронного двигателя с реактором. |
Все аппараты управления синхронным двигателем размещаются на станциях управления. На рис. 39 показан общий вид фасада станции управления ПН7028 для синхронных двигателей с реакторным пуском. Кроме аппаратов, перечисленных при описании схемы пуска синхронного двигателя СТМ-4000-2, на станции управления показаны приборы и аппараты, применяемые в управлении двигателей.
Синхронное вращение

Синхронное вращение (приливный захват) — ситуация, когда период обращения спутника вокруг своей оси совпадает с периодом его обращения вокруг центрального тела. При этом спутник всегда обращён к центральному телу одной и той же стороной, поскольку он обращается вокруг своей оси за то же время, которое ему требуется, чтобы обернуться по орбите вокруг своего партнёра. Приливный захват происходит в процессе взаимного движения и характерен для многих крупных естественных спутников планет Солнечной системы, а также используется для стабилизации некоторых искусственных спутников. Если разница в массах между двумя телами невелика, то они оба могут быть в приливном захвате друг относительно друга, как в случае с Плутоном и Хароном
При наблюдении синхронного спутника с центрального тела всегда видна только одна сторона спутника. При наблюдении с этой стороны спутника центральное тело «висит» в небе неподвижно. С обратной же стороны спутника центрального тела никогда не видно.
Когда ось собственного вращения спутника не перпендикулярна плоскости орбиты, наблюдаются либрации по широте, а когда орбита спутника имеет форму эллипса, а не окружности, то либрации по долготе.
Синхронное вращение является равновесным состоянием в небесной механике. Если изначально период обращения спутника вокруг планеты и период его обращения вокруг оси различны, возникают приливные волны, тормозящие или разгоняющие вращение вокруг оси.
Примеры
Большинство крупных спутников планет в Солнечной системе синхронизированы со своими центральными телами, так как их орбиты довольно малы, а приливные силы усиливаются обратно пропорционально кубу расстояния. Заметными исключениями являются нерегулярные спутники газовых гигантов, чьи орбиты пролегают существенно дальше орбит крупных спутников.
Наиболее известный и доступный для наблюдения пример — Луна, которая является синхронным спутником Земли. Оба естественных спутника Марса — Фобос и Деймос — имеют синхронное вращение. Крупные спутники Юпитера, Сатурна и Урана являются синхронными. Крупнейший спутник Нептуна Тритон также имеет синхронное вращение
Плутон и Харон — это яркий пример приливного захвата. Харон — очень большая луна относительно своего центрального тела и вращается вокруг него на небольшой орбите. Это заставило Плутон также обрести приливный захват по отношению к Харону. В результате два этих тела вращаются вокруг друг друга (барицентр системы лежит над поверхностью Плутона), словно соединённые тросом в двух противостоящих друг другу точках их поверхности.
Приливный захват астероидов по большей части неизвестен, но следует ожидать, что близко вращающиеся пары также должны быть в приливном захвате относительно друг друга.
Система трехфазного тока
Техническое значение имеет применение системы трехфазного переменного тока в качестве системы трехфазного тока, основной особенностью которой является то, что сумма всех напряжений и токов всегда равна нулю.
Электрические цепи называются фазами т. Совокупность электрических цепей, в которых напряжения одной частоты оказывают воздействие и имеют фазовый, сдвиг называются многофазными системами. Многофазная система состоит из ветвей обмотки. В многофазной системе может быть п = 3 симметричных систем (рис. «Симметричные системы» ). Во всех симметричных системах — за исключением нулевой системы — сумма всех векторов равна нулю. При количестве фаз т получаем п симметричных систем в зависимости от угла сдвига фаз а:
а = 2π n/m
Задача обмоток — создание вращающегося поля. Асинхронные двигатели имеют такую же конструкцию статора. В воздушном зазоре должно создаваться магнитное поле с постоянной амплитудой, вращающееся с постоянной угловой скоростью. Чтобы создать это поле, временные положения фаз токов должны совпадать с пространственными положениями соответствующих ветвей. У простой симметричной системы (п = 1) с т = 3 три ветви (обозначаемые как U, V и W) и, следовательно, обмотки должны быть равномерно распределены по окружности. На рис. «Обмотка двухполюсного двигателя с одной парой полюсов на каждую ветвь» показано расположение обмотки с тремя ветвями, с одной катушкой на каждую пару полюсов и ветвь. Схемы соединений фаз регламентируются стандартом DIN EN 60034, часть 8.
Создание вращающегося поля
Чтобы создать вращающееся поле в случае с простой симметричной системой (п = 1) с количеством ветвей т = 3, ветви должны быть геометрически смещены на электрически эффективный угол:
аеI = 360°·1/3 = 120°.
При одной катушке на каждую пару полюсов и ветвь создаваемое магнитное поле вращается против часовой стрелки, при этом «индикаторная полоска», смещающаяся вправо на рисунке а, «Создание вращающегося поля с одной катушкой на ветвь» (при а = 90°), показывает ток фазы в каждой из ветвей на рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь» в направлении магнитного потока. Расположение образует пару полюсов. Соответствующие магнитные потоки проходят вертикально к плоскости ветвей обмотки (рис. Ь, «Создание вращающегося поля с одной катушкой на ветвь»).
Поток ФRes (рис. с, «Создание вращающегося поля с одной катушкой на ветвь»), получаемый из трех ветвей, а также его направление достигаются геометрическим сложением трех отдельных потоков ФU, ФV И ФW.
Продвижение индикаторной полоски на угол а = 180° приводит к реверсированию направления тока в ветви W и, следовательно, к дальнейшему повороту созданного поля ФRes вправо (рис. «Создание вращающегося поля с одной катушкой на ветвь 2»).
При использовании двух катушек на одну ветвь расположение проводников «удваивается». Если обмотка должна образовывать две пары полюсов (р = 2), то обмотки необходимо делить на группы (рис. «Обмотка с двумя парами полюсов на каждую ветвь» ). При этом устанавливается механически эффективный угол:
am = 360° · (1/mp) = 60°.
Электрически эффективный угол остается без изменения. В случае как двухполюсного, так и четырехполюсного расположения поле вращается против часовой стрелки (рис. «Создание вращающегося поля с двумя катушками на ветвь» ). Чаcтоту вращения поля:
nd = fn/p
можно вычислить на основании частоты в линии fn и количества пар полюсов р. При р = 1 частота вращения поля равна частоте в линии (табл. «Частота вращающихся полей» ).
Вместе с количеством пар полюсов можно вычислить межполюсное расстояние:
τp = dsi /2π
как долю окружности статора, где dsi — внутренний диаметр статора. Он соответствует длине синусоидальной полуволны, которая соответствует распределению индукции поля ротора. В случае с двухполюсным двигателем (р = 1), межполюсное расстояние всегда равно aei = 180° (электрический угол) и совпадает с механическим углом am. Взаимозависимость этих двух углов показывает угол aei=p—am. Чтобы в обмотках наводилось одинаковое напряжение, ветви обмотки должны быть смещены относительно друг друга на угол aei = 120° или 2τp / 3, а структура и количество катушек должны быть одинаковыми. На каждую ветвь приходится одна треть межполюсного расстояния.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ: