
способ определения коэффициента трансформации обмоток асинхронного электродвигателя
Изобретение относится к электрическим машинам и может быть использовано при исследовании асинхронных конденсаторных электродвигателей. Технический результат заключается в повышении точности определения коэффициента трансформации. Способ определения коэффициента трансформации обмоток асинхронного электродвигателя заключается в измерении э.д.с. обмоток при вращении ротора, при этом указанные э.д.с. наводятся остаточным магнитным потоком ротора, при этом коэффициент трансформации равен отношению э.д.с. обмоток.
Формула изобретения
Способ определения коэффициента трансформации обмоток асинхронного электродвигателя путем измерения э.д.с. обмоток асинхронного электродвигателя при вращении ротора, отличающийся тем, что указанные э.д.с. наводятся остаточным магнитным потоком ротора, при этом коэффициент трансформации равен отношению э.д.с. обмоток.
Описание изобретения к патенту
Изобретение относится к электрическим машинам и может быть использовано при исследовании асинхронных конденсаторных электродвигателей.
Известен способ определения коэффициента трансформации обмоток асинхронного электродвигателя при питании его от источника двухфазного напряжения, приведенный в книге Юферов Ф.М. Электрические машины автоматических устройств. — М.: Высш.шк.,1988. с.83. Изменяя величины напряжений, подаваемых на обмотки электродвигателя при вращении его на холостом ходу, добиваются соблюдения двух условий: мощности, потребляемые обмотками, должны быть одинаковыми, а напряжения на обмотках — обратно пропорциональное потребляемым токам. Тогда отношение между подаваемыми на обмотки напряжениями или обратное отношение между потребляемыми токами равно значению коэффициента трансформации обмоток.
Недостатком этого способа является то, что необходимо иметь специальный регулируемый источник двухфазного напряжения.
Наиболее близким по технической сущности к предлагаемому является способ определения коэффициента трансформации обмоток асинхронного электродвигателя при питании его от источника однофазного напряжения, приведенный там же. Проводится два опыта при вращении электродвигателя на холостом ходу. В первом опыте обмотку А включают на номинальное напряжение U A (обмотка В отключена) и измеряют э.д.с. Е в обмотки В. Во втором опыте обмотку В включают на напряжение U в
Целью предлагаемого изобретения является повышение точности определения коэффициента трансформации и упрощение измерения.
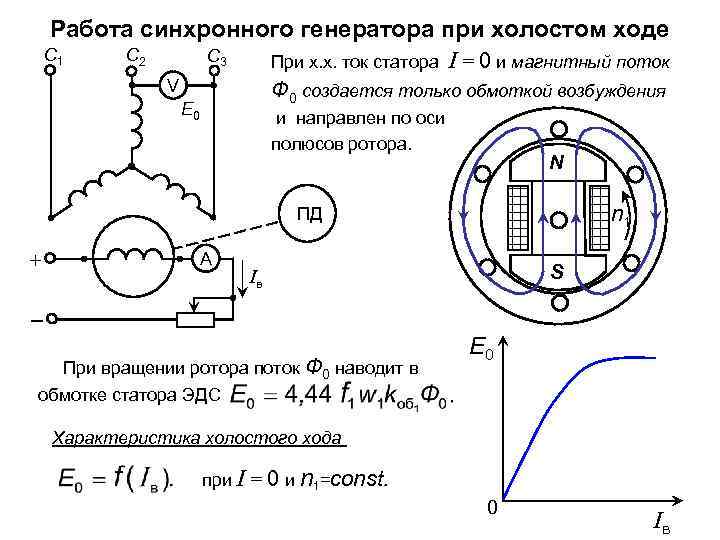
Поставленная цель достигается тем, что при определении коэффициента трансформации обмоток асинхронного электродвигателя путем измерений э.д.с. обмоток при вращении ротора, указанные э.д.с. наводятся остаточным магнитным потоком ротора, при этом коэффициент трансформации равен отношению э.д.с. обмоток. Вращение ротора электродвигателя проводится другим электродвигателем или при выбеге испытуемого электродвигателя после отключения его питания. Измерение э.д.с. обмоток производится при одинаковой частоте вращения ротора.
Э. д. с. Е 0А и Е 0В , наведенные в обмотках А и В остаточным магнитным потоком ротора Ф о , равны
Разделив второе выражение на первое, получим формулу для определения коэффициента трансформации обмоток
Таким образом, измерение э.д.с. обмоток, наводимых остаточным магнитным потоком ротора при его вращении, позволило повысить точность определения коэффициента трансформации и упростить способ, т.к. требуется измерение только э.д.с. обмоток, которое может быть выполнено с высокой точностью.
В настоящее время данный способ найдет применение при выполнении НИОКР и определении параметров исследуемых электродвигателей.
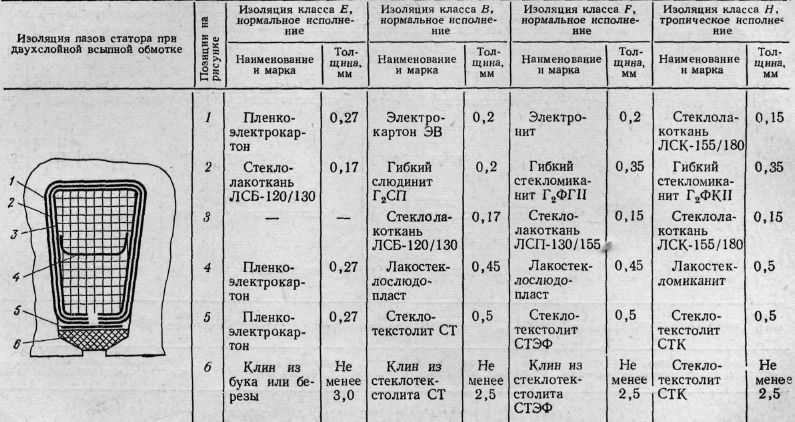
1.3 Расчет размеров зубцовой зоны статора и воздушного зазора
Паз статора для проектируемого двигателя следует выбрать
трапециидальной формы в соответствии с рис. 13, а.
Предварительное значение индукции в зубце по таблице 5, Тл,
.
Предварительное значение индукции в ярме статора по таблице 5, Тл,
.
Ширина зубца статора по (20), м,
где — коэффициент заполнения сталью
магнитопровода,
Высота ярма статора по (19), м,
Высота шлица паза, мм,
.
Ширина шлица паза по таблице 6, мм,
.
Высота паза в штампе по (21), м,
Наибольшая ширина паза по (22), м,

Меньшая ширина паза по (23) с учетом того, что угол наклона
клиновой части , см. рис. 13, м,




Высота клиновой части паза, по (25), м,
,
Размеры паза в «свету» с учетом припуска на сборку по (26, а, б,
в), м,
,
Высота паза в «свету» без клиновой части по (27) с учетом (25), м,

Площадь корпусной изоляции по (29), м2,
где — односторонняя толщина изоляции по
стенкам паза, см. таблицу 8, мм;
 .
.
Так как обмотка однослойная, то площадь прокладок на дне паза и
между слоями обмотки равна нулю .
Площадь поперечного сечения паза для размещения проводников по
(31) с учетом (28), м2,

Коэффициент заполнения паза по (32),
Значение находится в рекомендованных пределах
(0,68…0,73).
Эскиз паза статора приводится на рисунке 1.2. Спецификация
паза — в таблице 1.1.
Проведение ремонта
Любому электрооборудованию, с течением времени, свойственны отказы в его работе. Причины поломок могут быть от банального загрязнения до воздействия внешних факторов.

В случае нарушения работы, ремонт электродвигателя начинайте с чистки или продувки элементов статора. Затем, после удаления грязи и пыли, приступите к съему корпуса изделия для замены обмотки. На токарном станке, либо с помощью стамески срезается лицевая часть перемотки статора.

Для размягчения изолирующего материала статор следует разогнать до температуры около 200 градусов, после которой снимается обмотка, извлекается катушка и прочищаются пазы. После разборки электродвигателя новая обмотка статора устанавливается с помощью готовых шаблонов.
После установки катушки, её покрывают лаком, с последующей сушкой при температуре 150 градусов по Цельсию не менее двух часов.


Комбинированная обмотка
Кроме основного исполнения обмоток машин постоянного тока — петлевого и волнового, существует еще исполнение, дающее так называемую комбинированную обмотку. Последняя представляет собой сочетание петлевой и сложной волновой обмоток, расположенных в одних и тех же пазах, присоединенных к одному и тому же коллектору и работающих параллельно. Так как каждая обмотка двухслойная, то в пазу располагаются четыре слоя и к каждой коллекторной пластине присоединено четыре проводника. Комбинированные обмотки сложны по конструктивному исполнению, охлаждение их лобовых частей хуже. Применение этих обмоток весьма ограничено, они встречаются лишь в мощных машинах постоянного тока.

Выбор типа обмотки
Выбор типа обмотки преимущественно подчиняется требованиям экономического характера с учетом значений мощности, напряжения и скорости вращения машины. Требования экономического характера при выборе типа обмотки сводятся прежде всего к возможно лучшему использованию площади сечения паза, оцениваемому коэффициентом заполнения паза Коэффициент заполнения паза тем больше, чем меньше проводников во впадине, то есть чем больше их сечение. Другими словами, целесообразно иметь в машине меньшее число параллельных ветвей. Но опыт конструирования и эксплуатации машин постоянного тока показывает, что ток в параллельной ветви не должен в среднем превышать 250—300 а и во всяком случае должен быть ниже 500 а.
Коэффициент заполнения паза тем больше, чем меньше проводников во впадине, то есть чем больше их сечение. Другими словами, целесообразно иметь в машине меньшее число параллельных ветвей. Но опыт конструирования и эксплуатации машин постоянного тока показывает, что ток в параллельной ветви не должен в среднем превышать 250—300 а и во всяком случае должен быть ниже 500 а.
Напряжение и размеры коллектора также накладывают отпечаток на выбор схемы обмотки. Среднее напряжение между коллекторными пластинами не должно превышать определенного значения, число коллекторных пластин ограничивается диаметром коллектора и допустимой минимальной шириной коллекторных пластин 3—4 мм. Таким образом, выбор обмотки якоря машины постоянного тока — многофакторная задача, сложившиеся решения которой можно сформулировать следующим образом.
- Простые волновые (последовательные) обмотки применяются при мощности, не превышающей 50 квт при 110 в, 100 квт при 220 в, 300 квт при 440 в.
- Простая петлевая обмотка применяется в малых двухполюсных машинах и в многополюсных машинах при мощности 300—500 кет и выше.
- Сложные волновые (последовательно-параллельные) обмотки применяются в машинах мощностью 150—300 квт при 220 в, до 500 кет напряжением 440 и 600 в.
- Сложные петлевые обмотки применяются для машин низкого напряжения на большие токи в крупных машинах нормального и повышенного напряжения.
- Комбинированные обмотки находят некоторое применение в машинах весьма большой мощности.
- Назад
- Вперёд
bruskin_zorohovich_hvostov_electricheskie_mashiny_i_micromashiny.doc
… 9 …
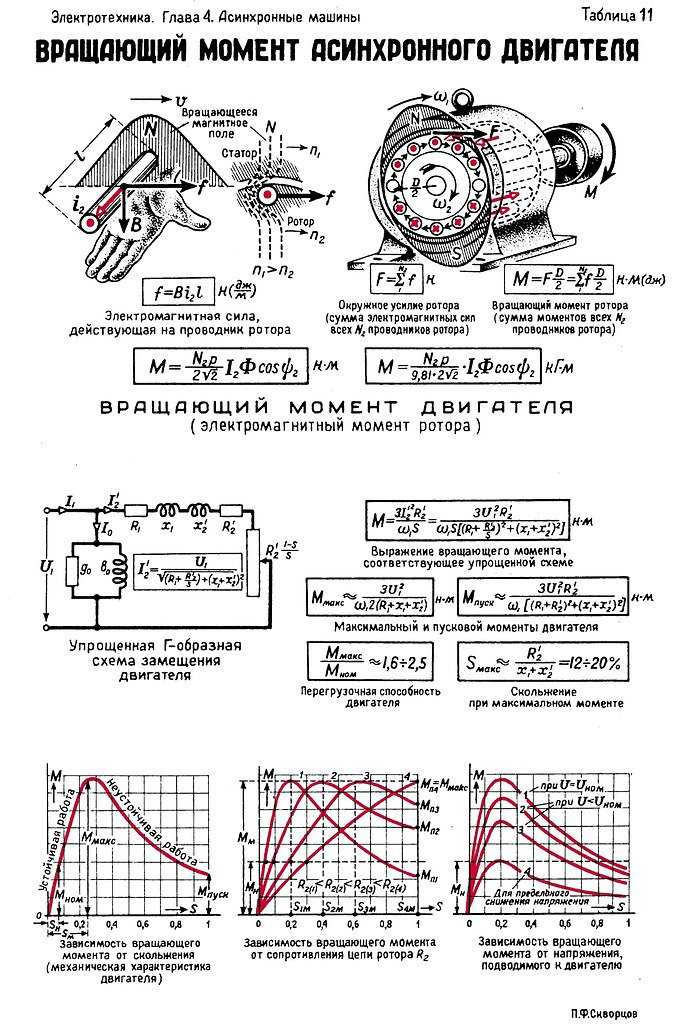
§ 4.5. ЭЛЕКТРОДВИЖУЩИЕ СИЛЫ, ИНДУЦИРУЕМЫЕ В ОБМОТКАХ ПЕРЕМЕННОГО ТОКАЭлектродвижущая сила сосредоточенной обмотки. резрезmmwФРис. 4.17.(а) (б)kфЭлектродвижущая сила распределенной обмотки при укорочении шага. Влияние скоса пазов. В q=?qскос пазов также способствует прибли-жению формы кривой к синусоидальной.Обмоточный коэффициент. обмоточным коэффициентом. обмотки переменного тока вследствие ее распределения по нескольким пазам, укорочения шага и скоса пазов по сравнению с сосредоточенной обмоткой.kр, kуко6, qу/хq = 3, у/?в трехфазных машинах большой и средней мощности соединение обмоток по схеме не следует применять.y = ?yf2f1Е1Е2, w1w2kоб1kоб2Е1Е2§ 4.6. СХЕМЫ ОБМОТОК МАШИН ПЕРЕМЕННОГО ТОКА в, г ва, б а, бРис. 4.18. (а)(б) а) q>2.q>6 Рис. 4.19. Однослойные обмотки. шаблонные концентрические обмотки.(р = q = 2 q=1 pqz = 2pqm = 24. АХ.а). Рис. 4.20.(а) pq = 2 z(б):1 — 2 — 3а, АХ 1—7, 2—8, 13—19 14—20; BY5—11, 6—12, 17—23 18—24, CZ9—15, 10—16, 213 224.а, 2р q = z124 Двухслойные обмотки. yРис. 4.21.(а) pq = 2, z= 24(б):1 23, 4 а 2р q = ; zyа) АХ 16, 2—7, 7—12,8—13, 13—18, 14—19, 19—24, 20—1. 1,2, 7 8 6, 7, 12, 13 б) а. в. б), а; а; бРис. 4.22.(а) (б)(в)1 – сердечник статора; 2 – нажимная шайба, 3 – катушкиРис. 4.23. Схема расположения катушек одной фазы на статоре трехфазной машины с одно-двухслойной обмоткой (2р = 4; q = 3;z=36)Одно-двухслойные обмотки. 3, 5, 7 q — 2 q — 1. yбyм1=yб — 2; yм2=yб — 4;yм3=yб — 6q>2. q=2(q+1)/3q. q=2(q+2)/3qq>4.Точные обмотки. В Рис. 4.24. (а) А Ах13Рис. 4.25. Схема двухфазной точной обмотки (а) и распределение ее проводников по пазам (б): 1 — проводники фазы АХ; 2 —проводники фазы BYа АхFxб) ab, de, ef, hkbc, cd, fg, ghа pz=АХBYб). § 4.7. МЕТОДЫ РАСЧЕТА МАГНИТНОЙ ЦЕПИ ЭЛЕКТРИЧЕСКИХ МАШИНПринцип расчета. а) б) Рис. 4.26. Магнитные поля электрических машин с явно выраженными (а) и неявно выраженными (б) полюсамиРис. 4.27. (а, б)FBF?, Fz, Fm, Fa1, Fa2б). FzlFz2Рис. 4.28. (а) (б) Магнитное напряжение в воздушном зазоре. 1 а). bi. bibibпдbi = bпд + 2?bi?bпд. =bj?коэффициентом полюсного (магнитного) перекрытия.lt??В?В?if?а). i?iiб). k?, коэффициентом воздушного зазора или коэффициентом Картера ?i = k??.k?k? = 11?t1b?2b?bbbоbп.k?1k?2Рис. 4.29. Кривые распределения магнитной индукции в воздушном зазоре у краев ротора и статора (а) и при наличии радиальных вентиляционных каналов (б)В?Н?lа1lа2а) б). lilа1lа2пк Рис. 4.30.(а…в)bк, lF?В??F? = (0,7…0,9)FB.Магнитное напряжение в зубцовом слое. В bzа) ?zHz?zв).tа) zпxРис. 4.31. Кривые распределения магнитных потоков в зубцовом слое (а) и построение зависимостей (б):Bz=f(Hz) и Вz=f(Нz)Szx?tSzx=ФzxSzx+ФпхSzx. ?zxФпxSzx?tSzx = ?’zx?zx=?zxSzx, Bпх=ФпхSпxkz = SnxSzxзубцовый коэффициент, НпхxxНпх?zxб). HzxBz=f(Hz), Bz=f(Hz) kz.HzРис. 4.32. HzВ’zkz. hz?’z?z. ?zа) FzSzxSzxB‘z, kz.HzэквНzэкв13Bz= zmaxМагнитное напряжение в полюсах, ярмах ротора и статора. В ???alа2Рис. 4.33.(а) (б)Fa1Fa2Ва1 Ва2LalLa2На1На2FalFa2FB, FBВтНт hmhm. BmТок возбуждения и намагничивающий ток. FBwBРис. 4.34. wфkоб.фт k?k?k?Магнитная характеристика. а Ф=f(FB) FB?F?. Ф=f(FB) В большинстве электрических машин точку aсоответствующую номинальному режиму, выбирают на криволинейном участке магнитной характеристики. kнаса) ab, Fв.номbe, kнасkнac =б kнасб) 21,а, номb) F*в.ном= d).номFв.номkнасв.номв.номFвFв.ном= F*вF*в.ном. § 4.8. РАССЕЯНИЕ И ИНДУКТИВНЫЕ СОПРОТИВЛЕНИЯ ОБМОТОК В МАШИНАХ ПЕРЕМЕННОГО ТОКАВ машинах переменного тока потоки рассеяния и соответствующие им индуктивные сопротивления имеют относительно большие значения по сравнению с трансформаторами.Рис. 4.35.13 6 — Магнитные проводимости потоков рассеяния. В пазовый ??а); лобовой ?лб); ??в); дифференциальный ?дпл?д?п?л?к?дlililnкbк?а)п = h1/3bп+h2bп.Индуктивное сопротивление рассеяния обмотки. В pqа wк wФ—wкpqa, ks=у/?лд
… 9 …
§ 4.5. ЭЛЕКТРОДВИЖУЩИЕ СИЛЫ, ИНДУЦИРУЕМЫЕ В ОБМОТКАХ ПЕРЕМЕННОГО ТОКА
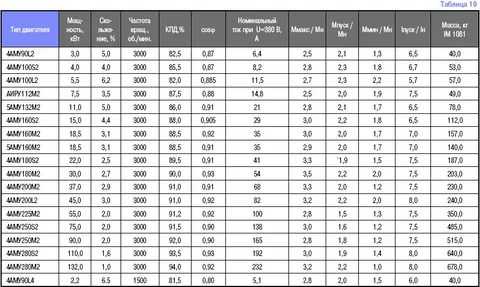
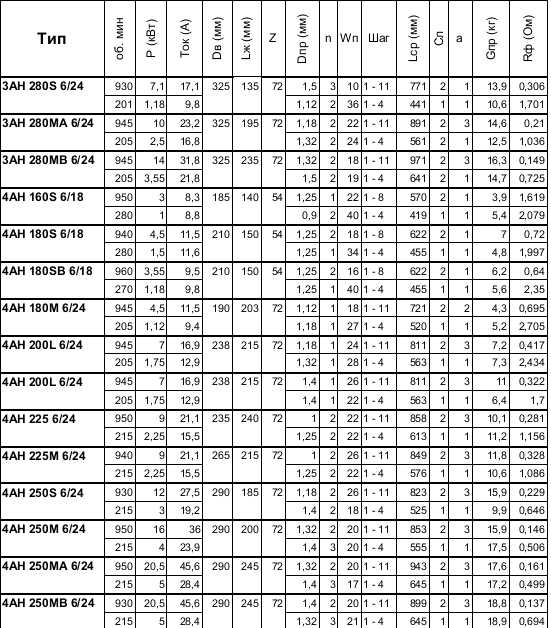
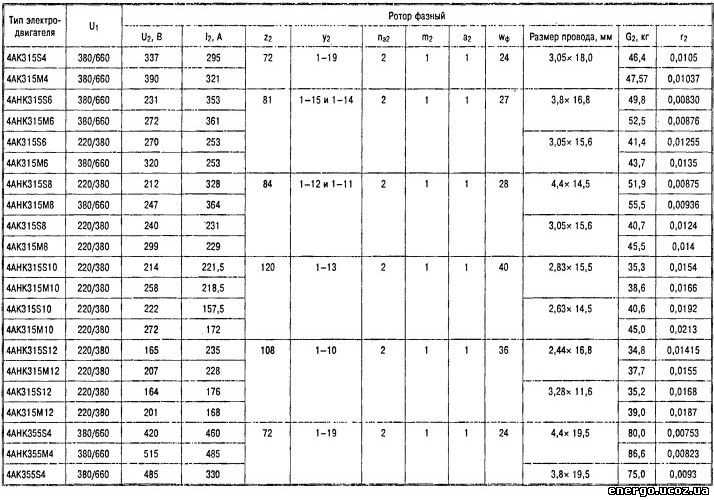
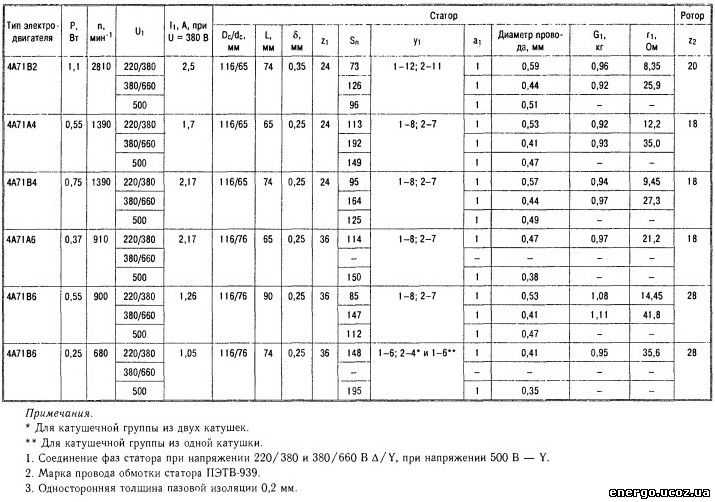
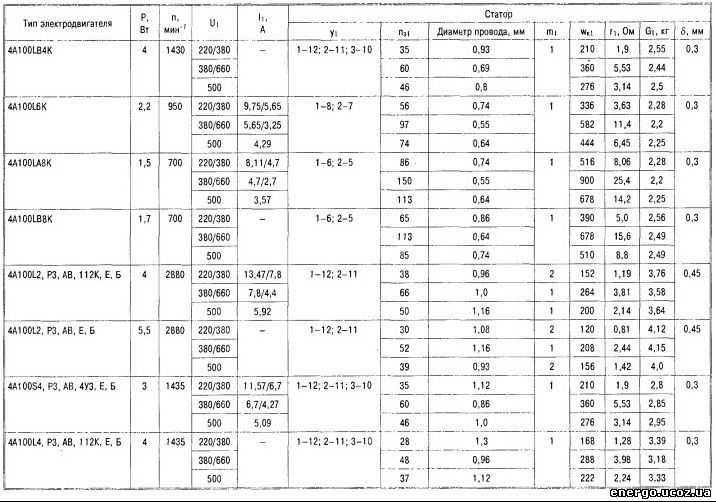
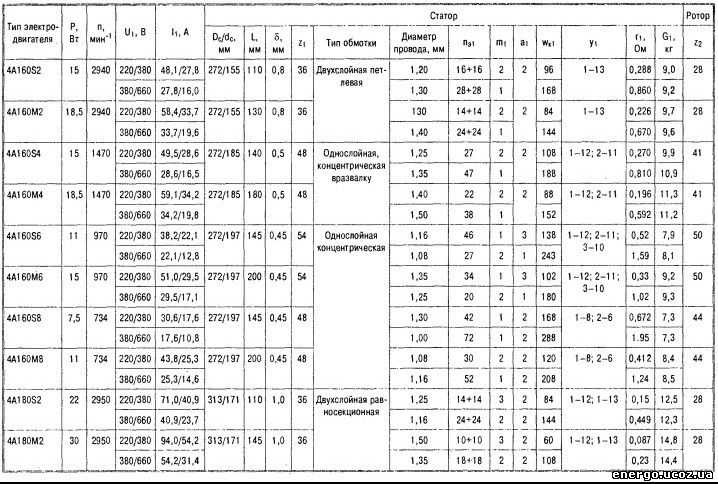
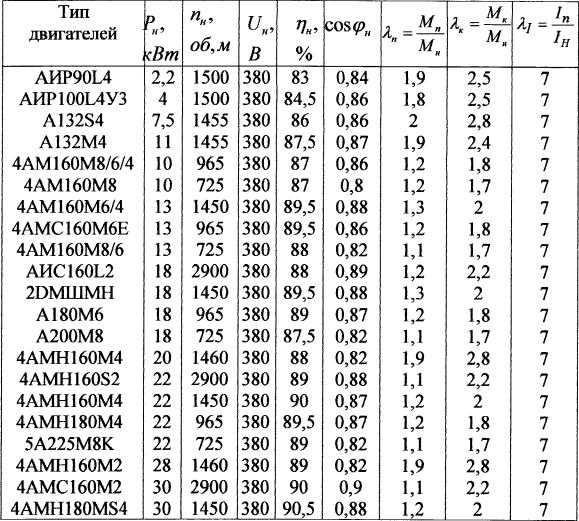
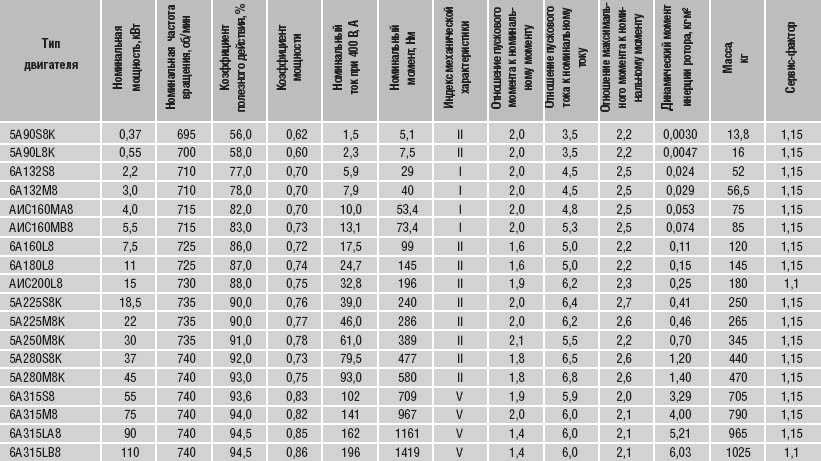
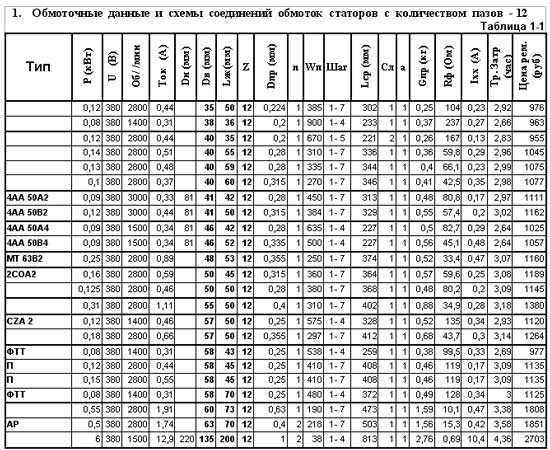
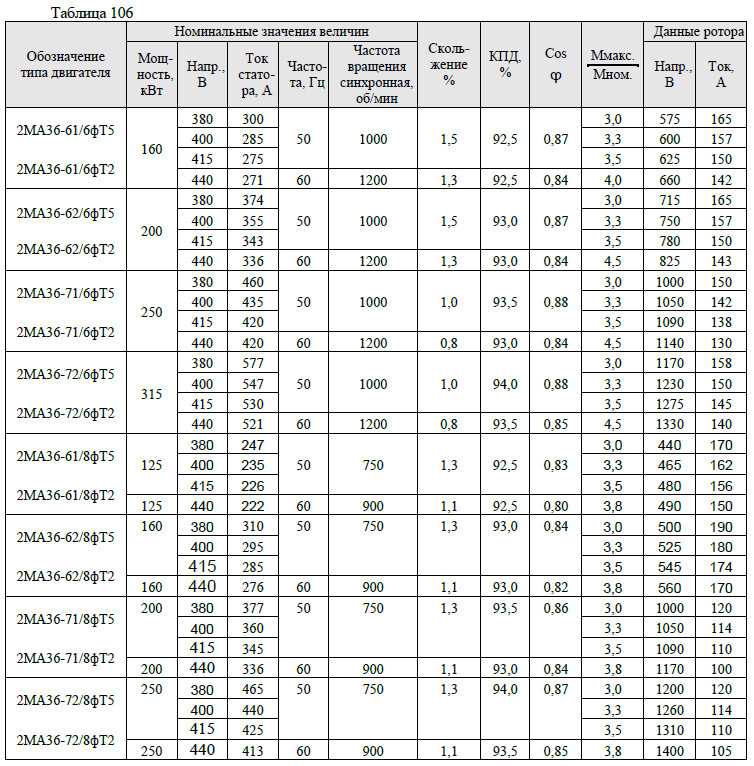
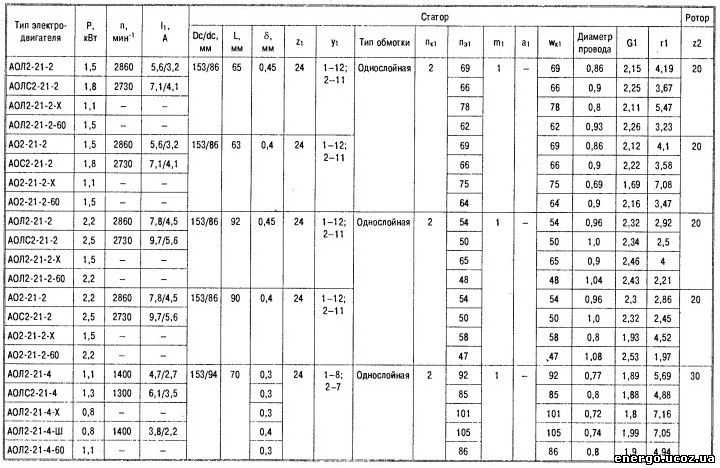
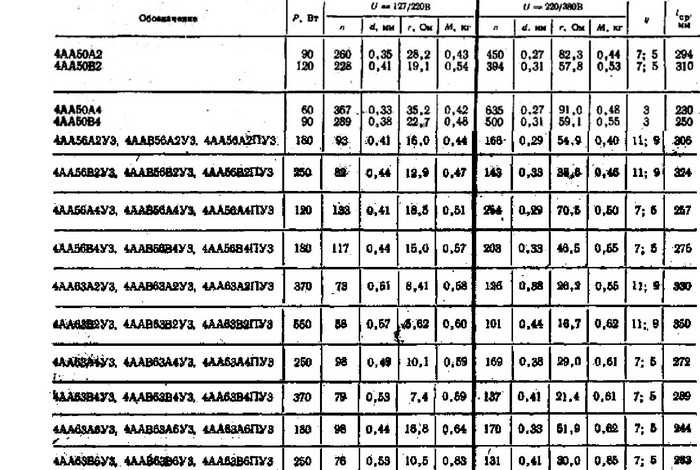
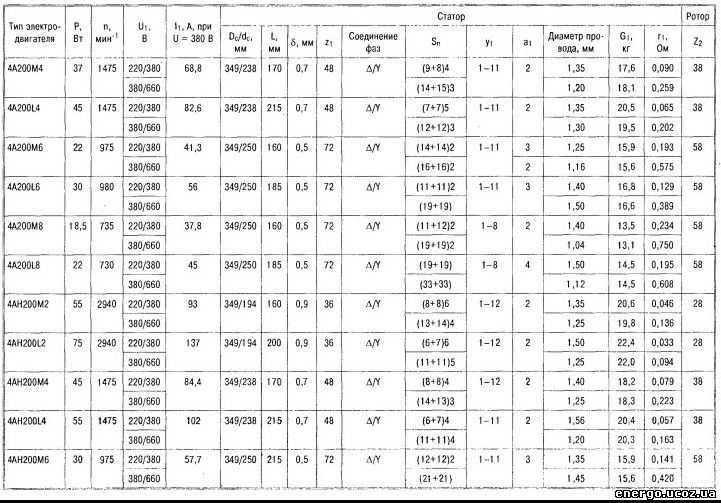
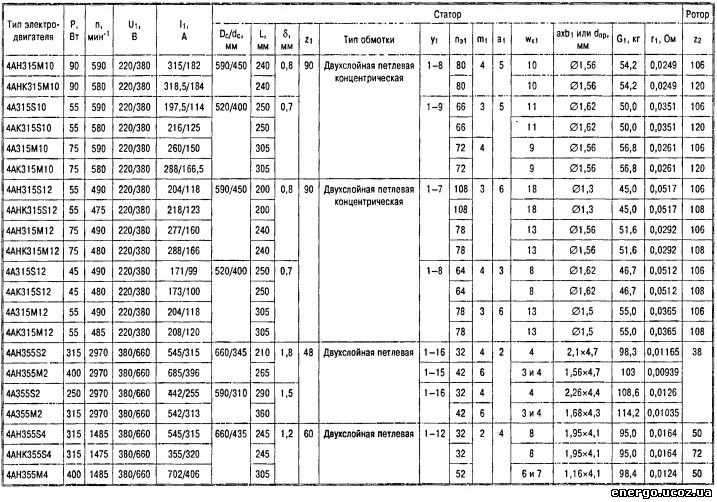
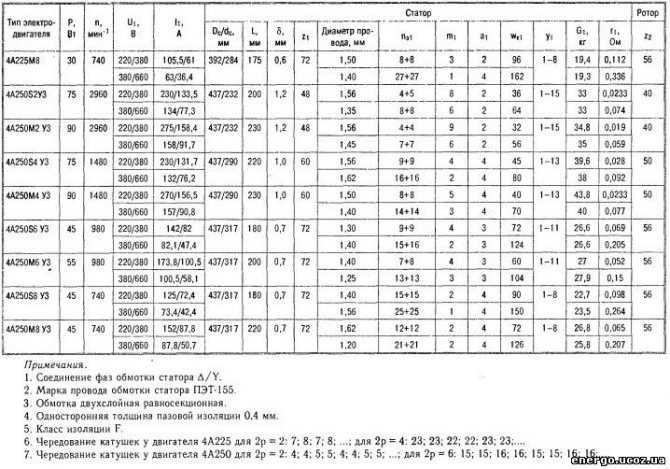
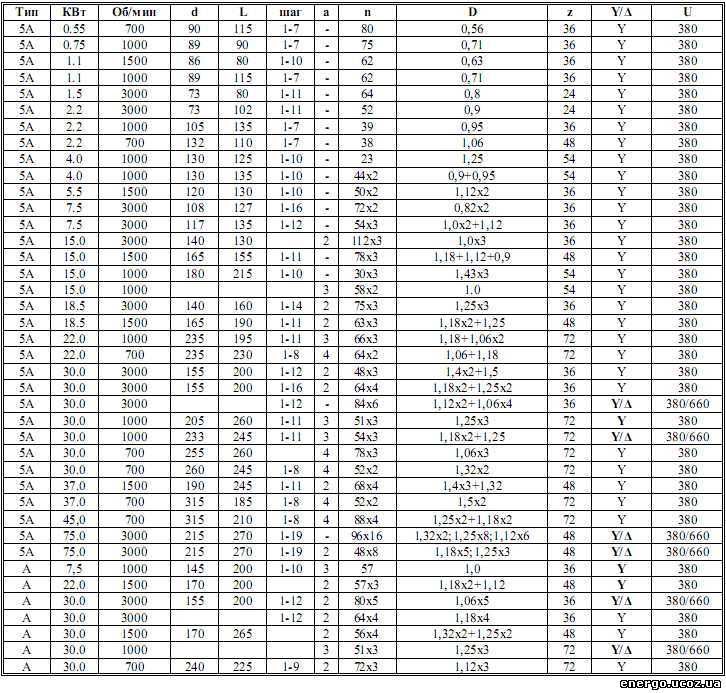
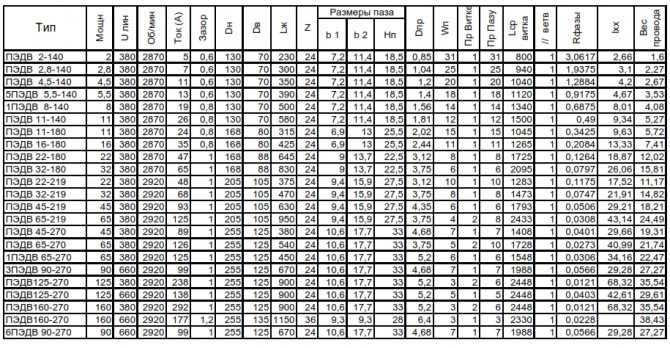
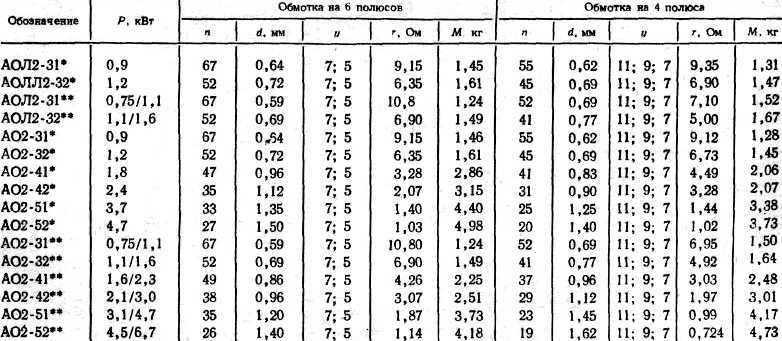
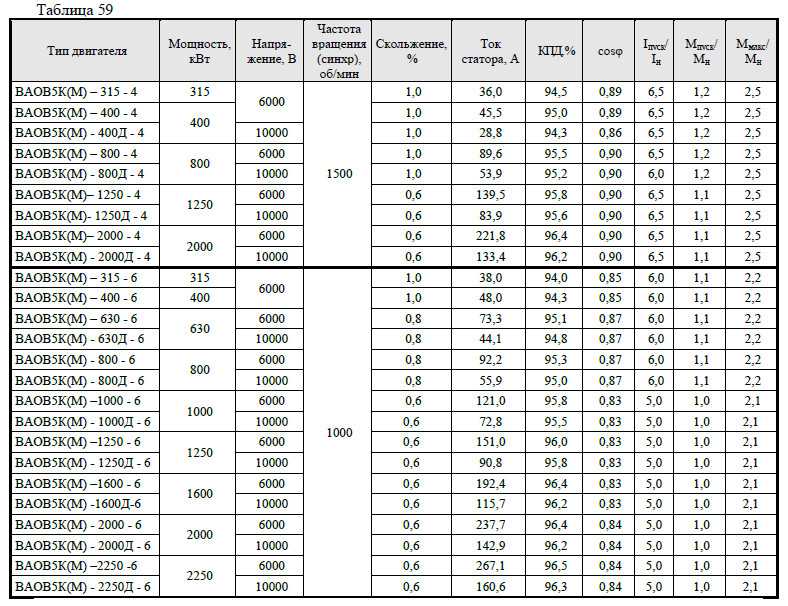
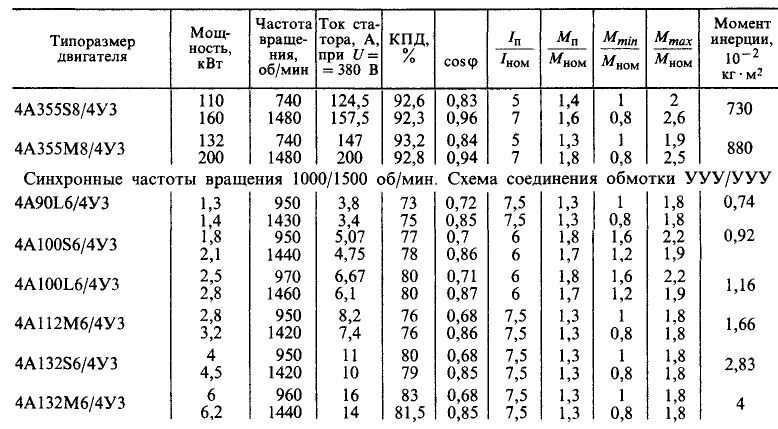
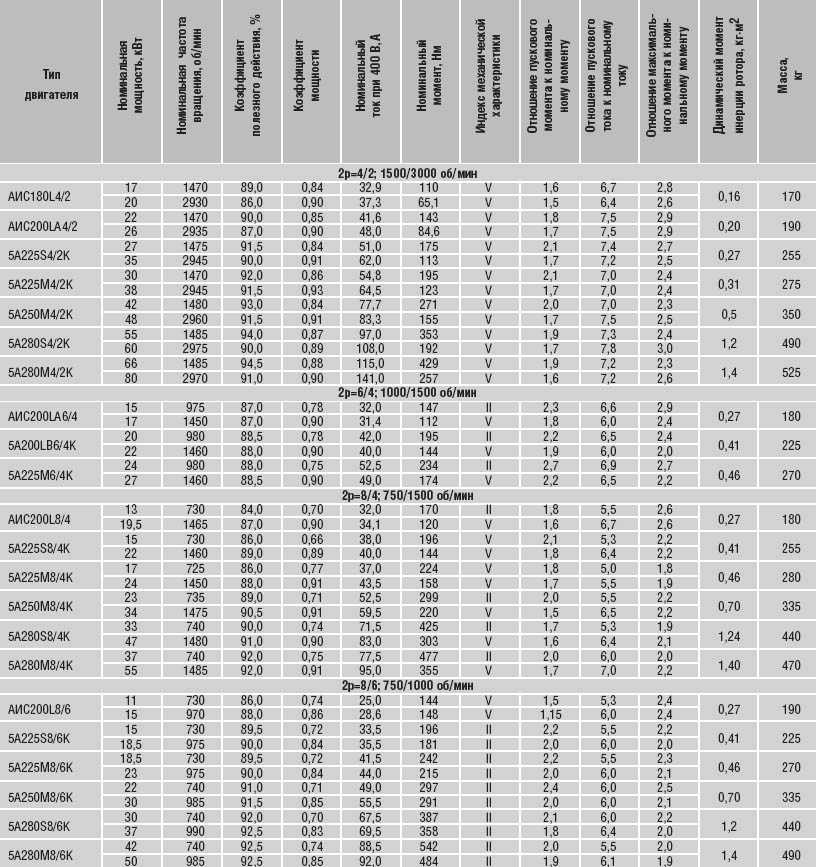
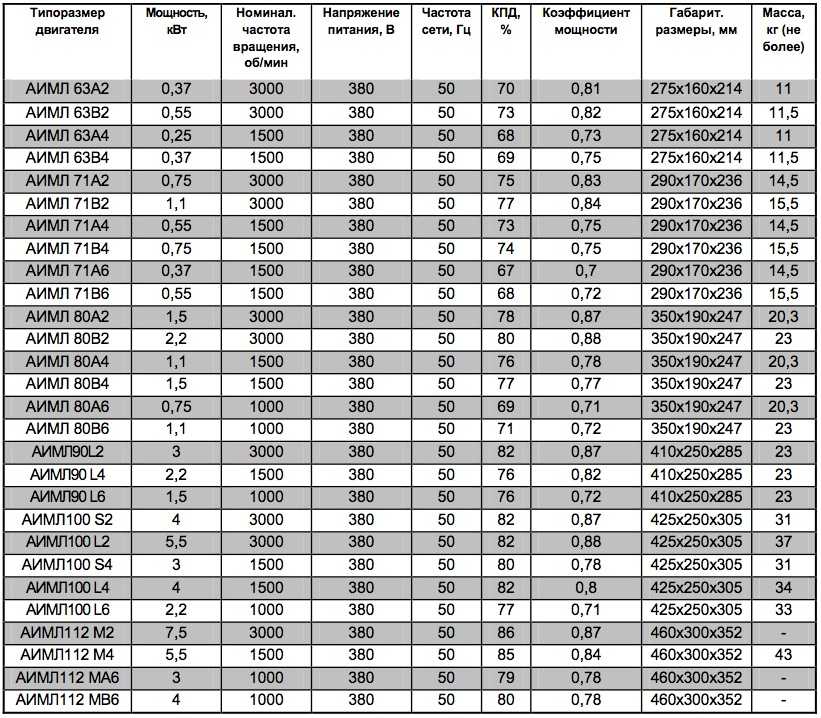
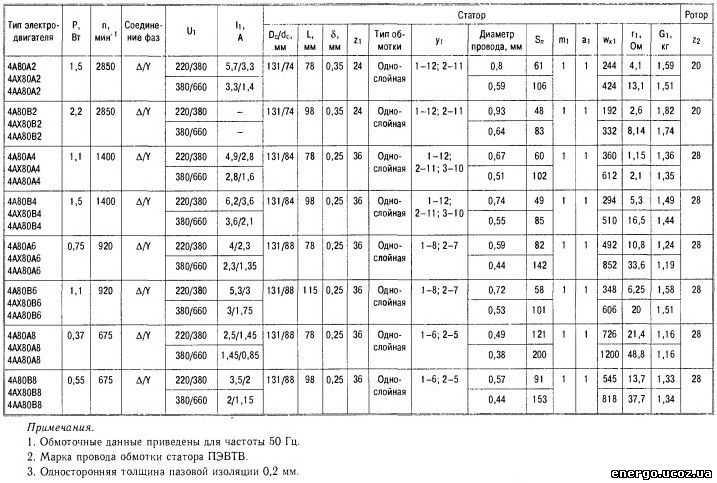
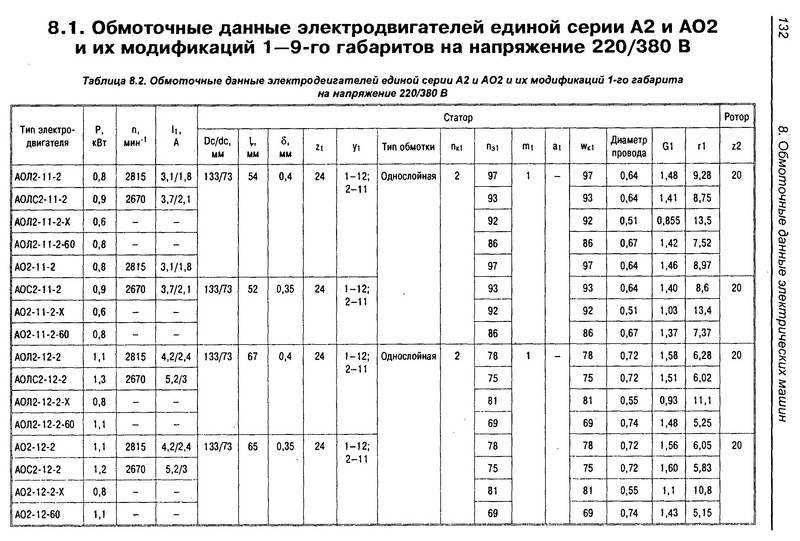
Обмоточные данные электродвигателей
Это справочные данные, поэтому самый надежный способ получить такую информацию – обратиться к соответствующим источникам. Эти данные также могут приводиться в паспорте к изделию.
В сети можно встретить советы, в которых рекомендуют при перемотке вручную пересчитать витки и измерить диаметр провода. Это трата времени. Значительно проще и надежней по маркировке двигателя найти всю необходимую информацию, в которой будут указаны следующие параметры:
- номинальные рабочие характеристики (напряжение, мощность, потребляемый ток, число оборотов и т.д.);
- количество проводов для одного паза;
- Ø проволоки (как правило, в данном показателе изоляция не учитывается);
- информация о внешнем и внутреннем диаметре статора;
- количество пазов;
- с каким шагом выполняется обмотка;
- размеры ротора и т.д.
Ниже представлен фрагмент таблицы с намоточными данными для электромашин типа 5A.
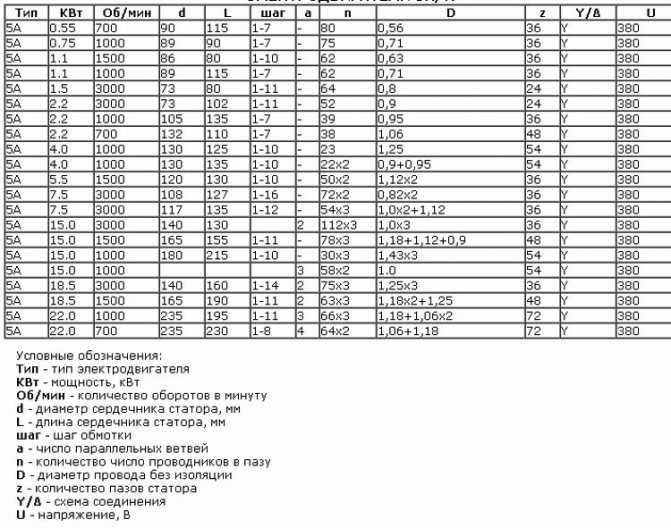
Пример таблицы с намоточными данными
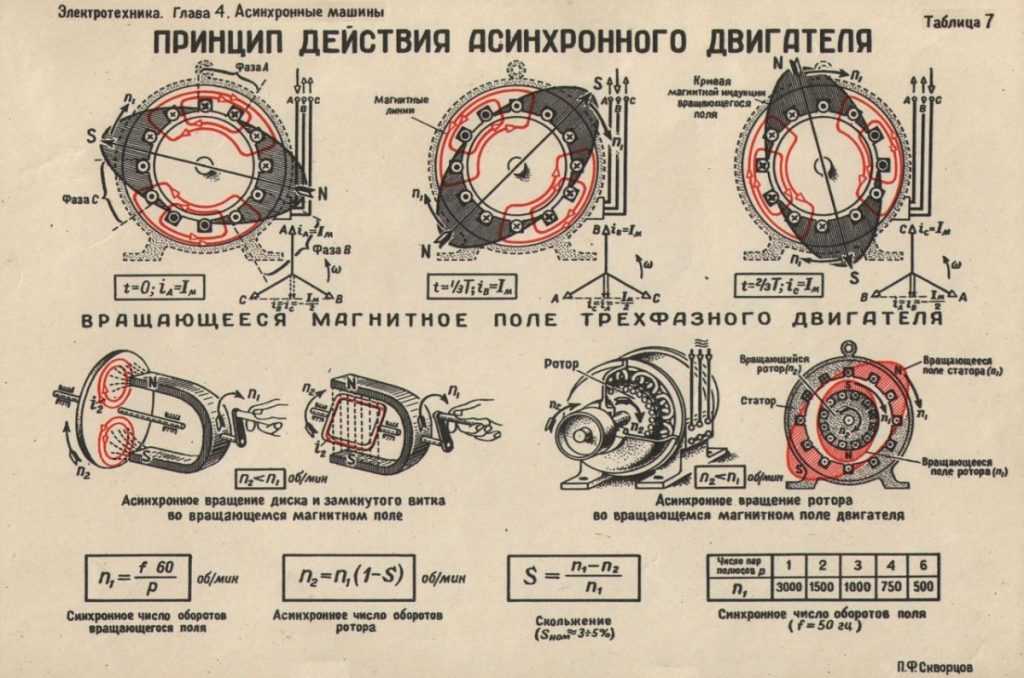
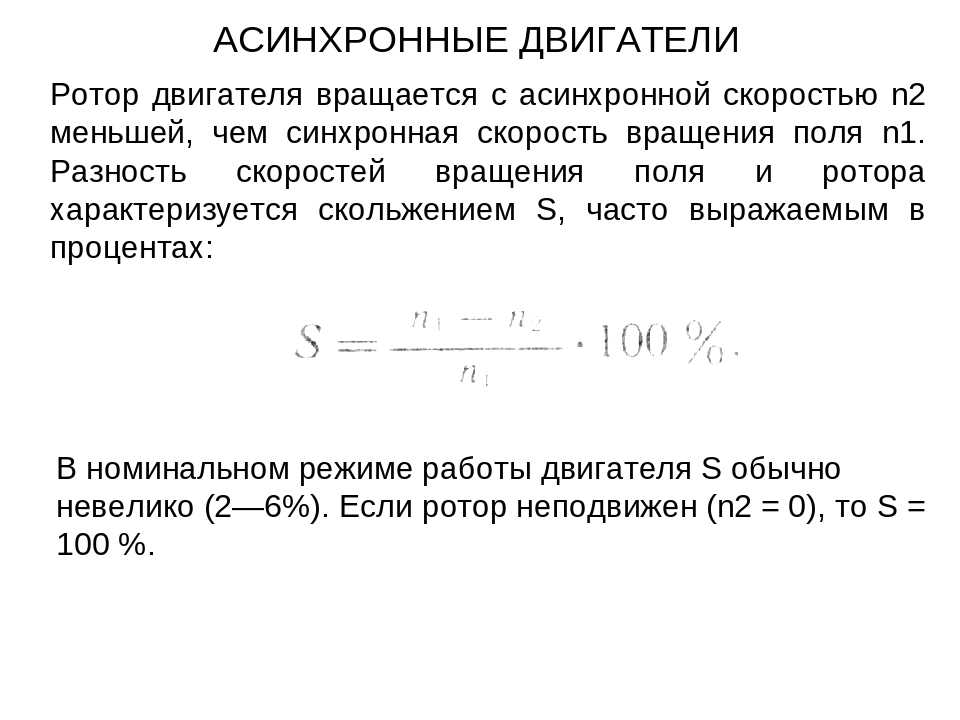
Типы асинхронных двигателей
В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида: двигатели постоянного тока двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками. Простой двигатель имеет 2 положения ротора (2 “мёртвые точки”), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные
– электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные
– замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).
Синхронный
– двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше). Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя. Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.
Асинхронный
– двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин – индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
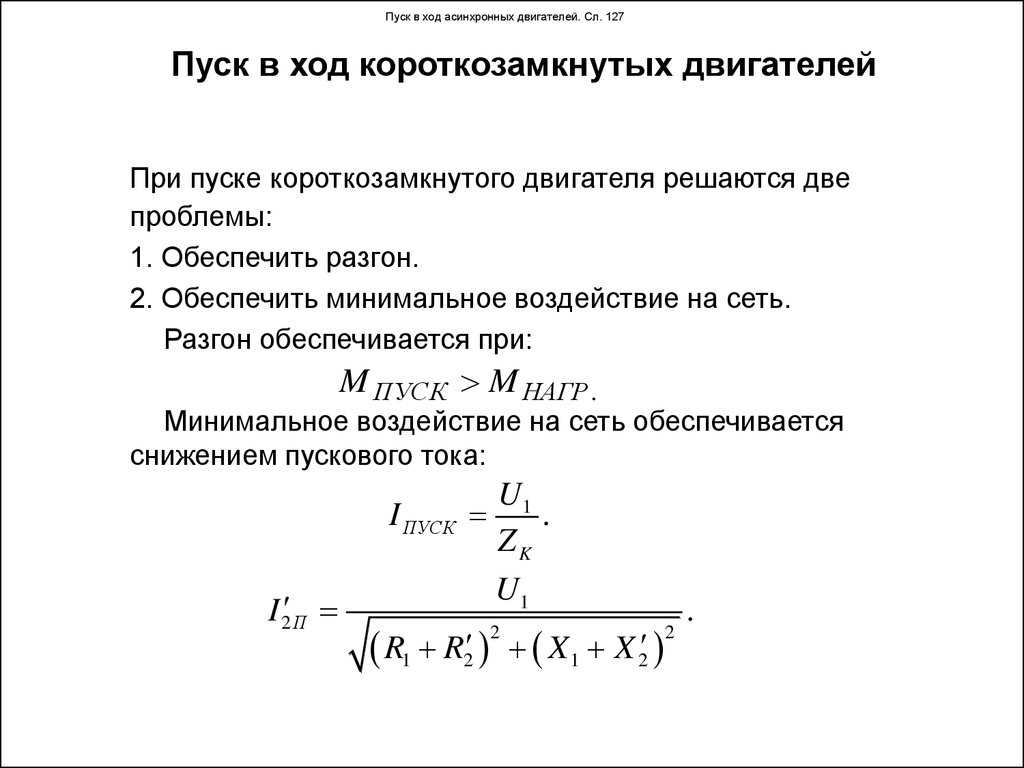
Однофазный асинхронный двигатель с короткозамкнутым ротором
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.
Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями. Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
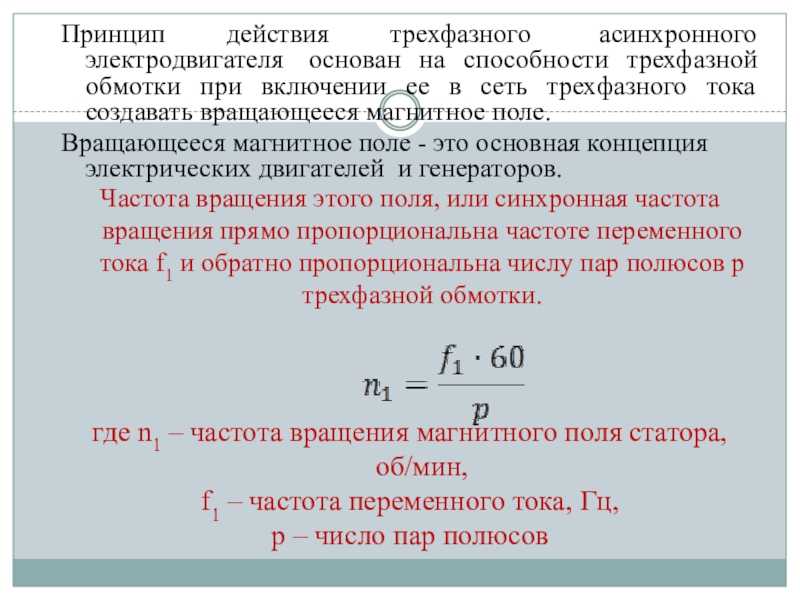
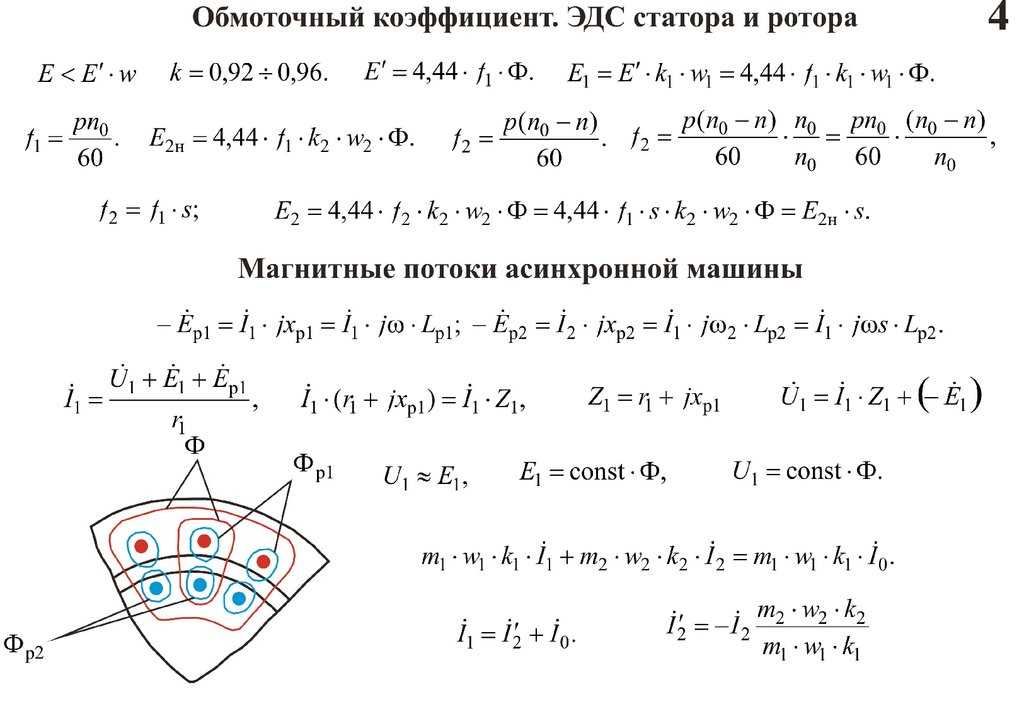
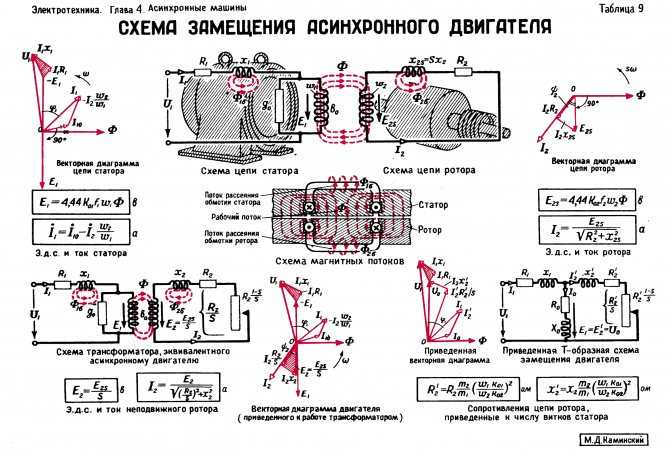
Электродвижущие силы обмоток двигателя
ЭДС обмотки статора. ЭДС обмотки статора e1наводится вращающимся магнитным потоком. По аналогии с трансформатором можно написать, что ЭДС фазы обмотки статора определяется формулой:
где w1 – число витков обмотки статора;kоб1 — обмоточный коэффициент, который учитывает укорочение шага обмотки, ее распределение по нескольким пазам и скос пазов.
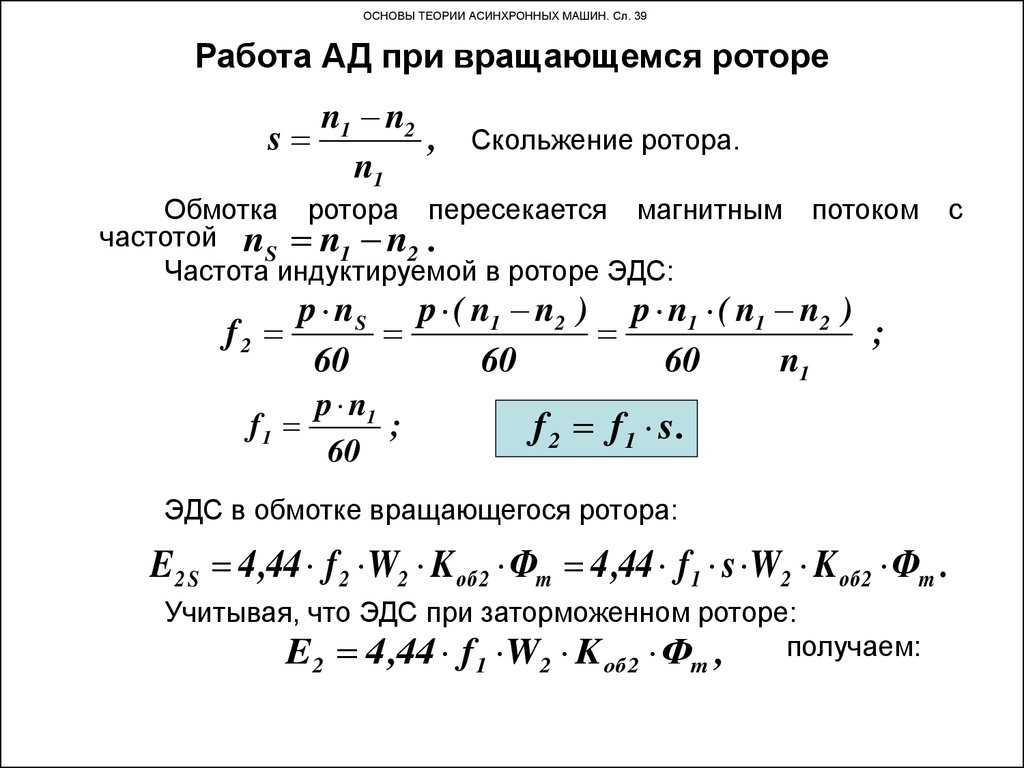
3.8.2. ЭДС обмотки ротора.
В неподвижном роторе частота ЭДС f2= f1, т. е. такая же как у ЭДС обмотки статора. Во вращающемся роторе частота ЭДС равна f2. В этом случае из (3.7) наводимая ЭДС

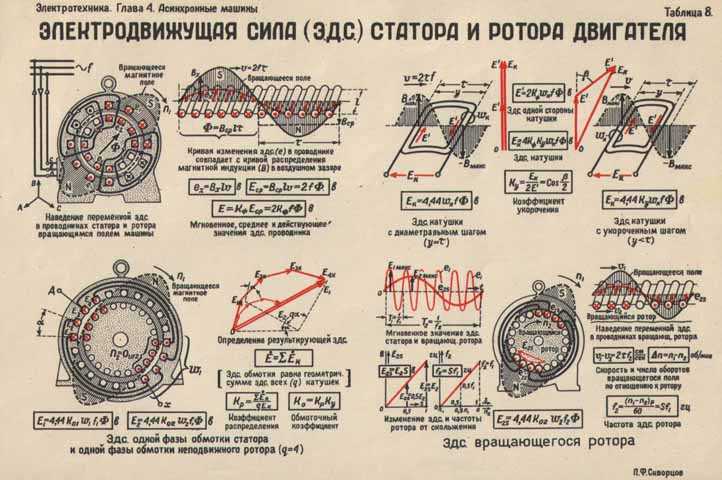
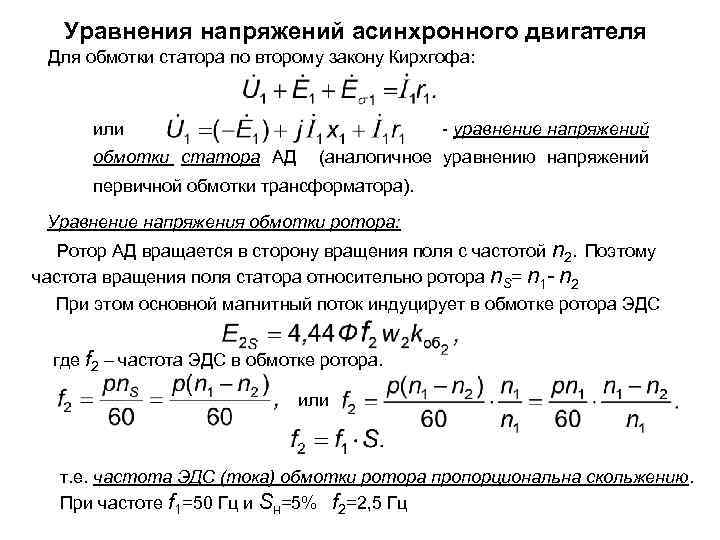
Индекс s относится к вращающемуся ротору.
Подставив (3.5) в (3.8) находим связь между ЭДС вращающегося и неподвижного роторов
s%X2X2s
а для неподвижного
Защита статора с помощью теплового реле
Суть такой защиты состоит в применении реле с пластиной из биметалла. Металлическая полоса, под действием электрического тока, начинает работать на изгиб. По достижению определенной температуры пластина, под действием пружины, расцепляется со специальной защелкой и разъединяет всю электрическую схему.

В исходное положение пластина приходит при помощи ручного нажатия кнопки. Конструкция теплоизоляции статоров различна, исходя из области применения, показателей тока и устройства реле.
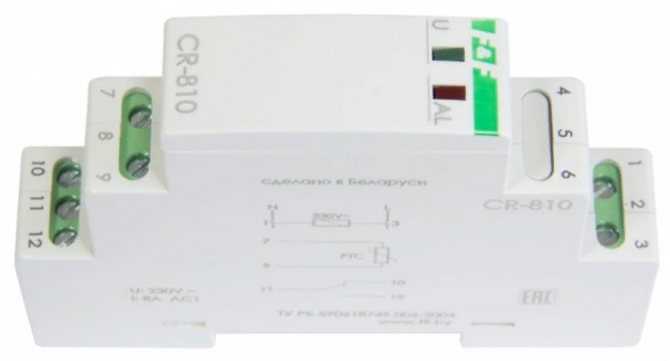
В настоящее время реле производятся как в составе сборочных единиц, так и самостоятельных деталей. В зависимости от предназначения, отличаются ручным и автоматическим принципом действия.
Для приборов, рассчитанных на узкий диапазон величины потребляемого тока, выбор защиты требует более ответственного подхода. С включением электродвигателя в сеть происходит нагрев металлической полосы путем прохождения заряда по намотанной спиралевидной проволоке.
Сфера применения
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными
Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость
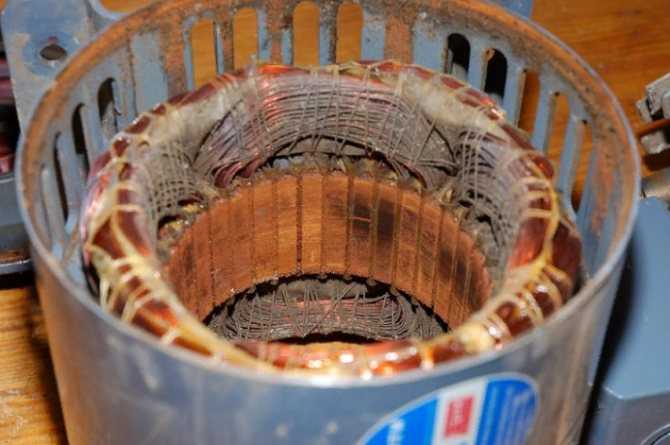
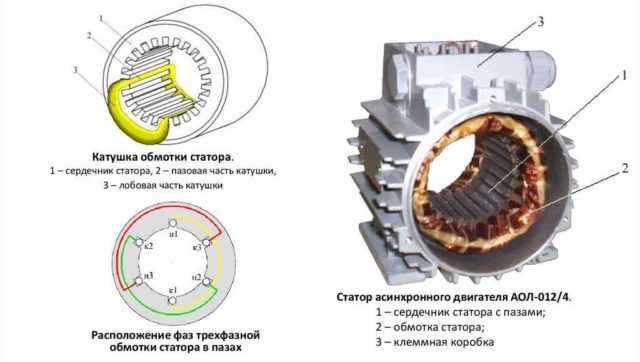
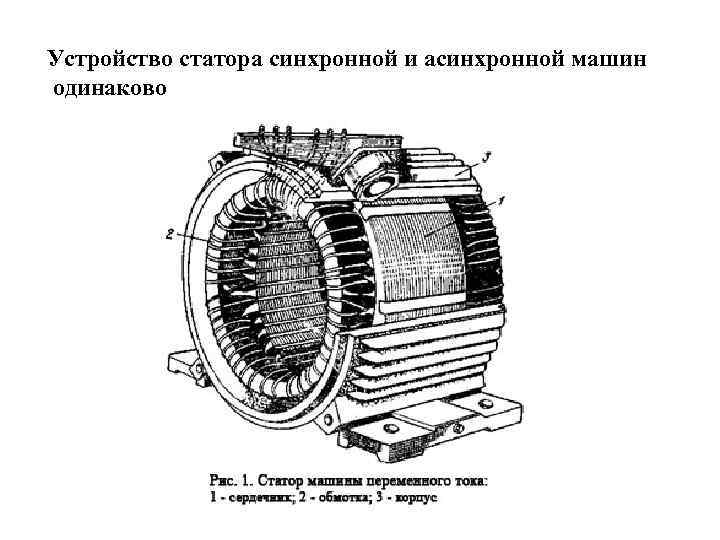
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.

Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).

Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).

2.1 Тепловой расчет
Превышение температуры внутренней поверхности сердечника статора
над температурой воздуха внутри двигателя по (204), °С,
где — коэффициент, учитывающий теплопередачу
от обмотки статора через станину в окружающую среду, определяется по таблице
24,
— электрические потери в пазовой части обмотки статора по (202),
Вт,
коэффициент увеличения потерь;

коэффициент теплоотдачи с поверхности по рис. 30;

Перепад температуры в изоляции пазовой части обмотки статора по
(205), °С,
где расчетный периметр поперечного сечения
паза статора по (206), м,
,

— средняя эквивалентная теплопроводность пазовой изоляции, Вт/(м×°С);
— среднее значение теплопроводности внутренней изоляции катушки по
рис. 32;


где — электрические потери в лобовой части
обмотки статора по (203), Вт,
— периметр условной поверхности охлаждения лобовой части, м,
— толщина изоляции лобовых соединений, м,

Превышение температуры наружной поверхности изоляции лобовых
частей обмотки над температурой воздуха внутри машины по (210), °С,
статор двигатель асинхронный
охлаждение
Среднее превышение температуры обмотки статора над температурой
внутри машины по (211), °С,


Превышение температуры воздуха внутри машины над температурой
окружающей среды по (212), °С,
где — сумма потерь, отводимых в воздух внутри
машины по (213, б), Вт,

— сумма потерь в двигателе при номинальном режиме по (214), Вт,
,


эквивалентная поверхность охлаждения корпуса по (215, б), м2,
условный периметр поперечного сечения ребер станины по рис. 33,

— коэффициент подогрева воздуха, по рис. 30;
Среднее превышение температуры обмотки статора над температурой
окружающей среды по (216), °С,
Значение находится в рекомендованных пределах.
Преобразователи напряжения в схемах питания
Бытовые электрические сети стандартизированы по напряжению и частоте переменного тока, а вот приборы, которые подключаются к ней, могут нуждаться в совсем иных параметрах питания. Например, процессоры и компоненты электроники работают только в низковольтных цепях постоянного тока. Для того чтобы универсальность источника не была преградой для работы техники, подключаемые устройства комплектуют встроенными или наружными преобразователями напряжения на основе трансформаторов.
В линейных или традиционных источниках питания используются силовые трансформаторы. Они великолепно справляются с большой нагрузкой, но обладают некоторыми недостатками:
- Большие размеры, обусловленные частотой сети 50 Гц. Это сказывается на весе источников питания, например, при выходном напряжении 16 В на каждый ампер выходного тока требуется приблизительно 0,5 кг массы.
- Сравнительно большие потери мощности на тепло и, как следствие, низкий КПД.
- Заметное потребление на холостом ходу.

Из-за перечисленных недостатков они были вытеснены импульсными преобразователями в зарядных устройствах и компьютерной технике. В подобных блоках питания электроэнергия попадает на трансформатор через фильтр и электронную схему в виде тока с очень высокой частотой. Благодаря этому КПД передачи мощности резко возрастает. Таким образом, блоки питания, работающие на этом принципе, значительно меньше и легче традиционных аналогичной мощности.
https://youtube.com/watch?v=dgoFznbxQPs
Преобразование электроэнергии для передачи её от производителя до потребляющих приборов — очень ёмкая, но далеко не единственная область применения трансформаторов. Огромное разнообразие этих устройств можно встретить в самых непохожих местах — от звукоснимателя и микрофона до сварочного аппарата и мощных измерительных приборов. А в качестве преобразователя напряжения сети трансформаторы окружают человека повсюду.





