Устройство асинхронного электродвигателя
В его конструкцию входят следующие элементы:
- Статор цилиндрической формы, собранный из стальных листов. Сердечник статора имеет пазы, в которые уложены обмотки. Их оси сдвинуты на 120 градусов по отношению друг к другу.
- Ротор (короткозамкнутый или фазный). Первый вариант представляет собой сердечник с алюминиевыми стержнями, накоротко замкнутыми торцевыми кольцами (беличья клетка). Второй вариант состоит из трехфазной обмотки, чаще всего соединенной «звездой».
- Конструктивные детали – вал, подшипники, лапы, подшипниковые щиты, крыльчатка и кожух вентилятора, коробка выводов — обеспечивающие вращение, охлаждение и защиту механизма.
Схему асинхронного двигателя с указанием его деталей легко найти в интернете или в пособиях.
Принцип работы асинхронного двигателя
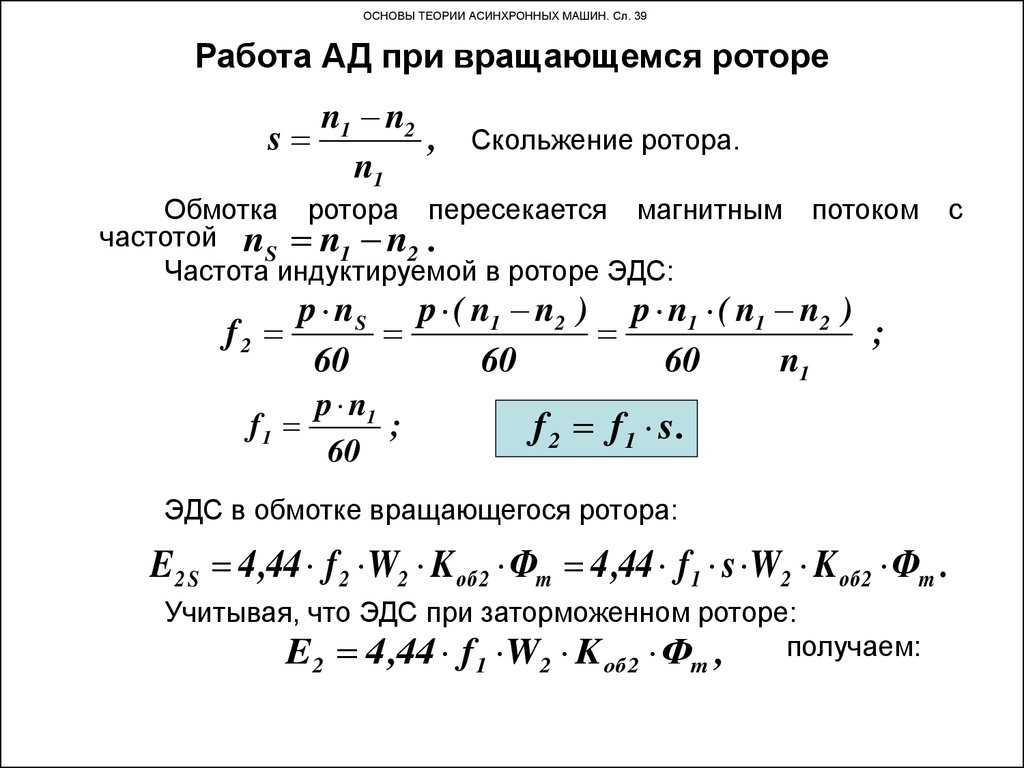
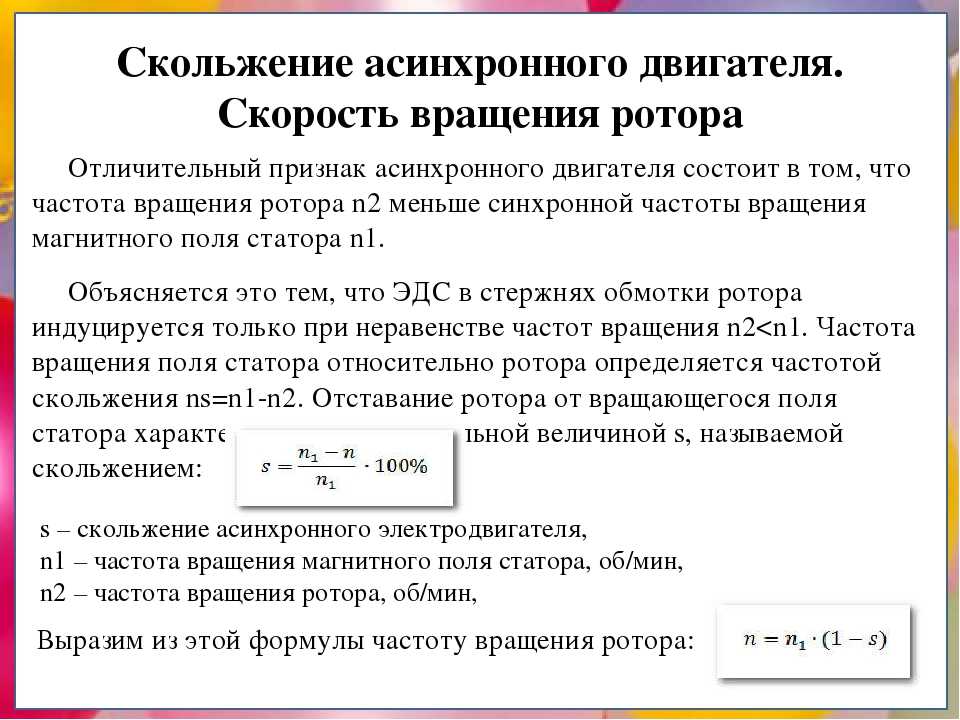
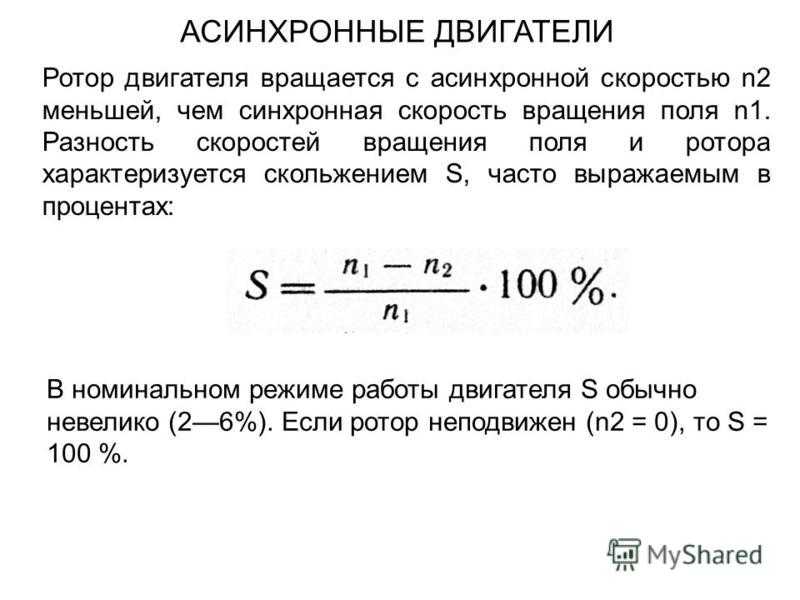
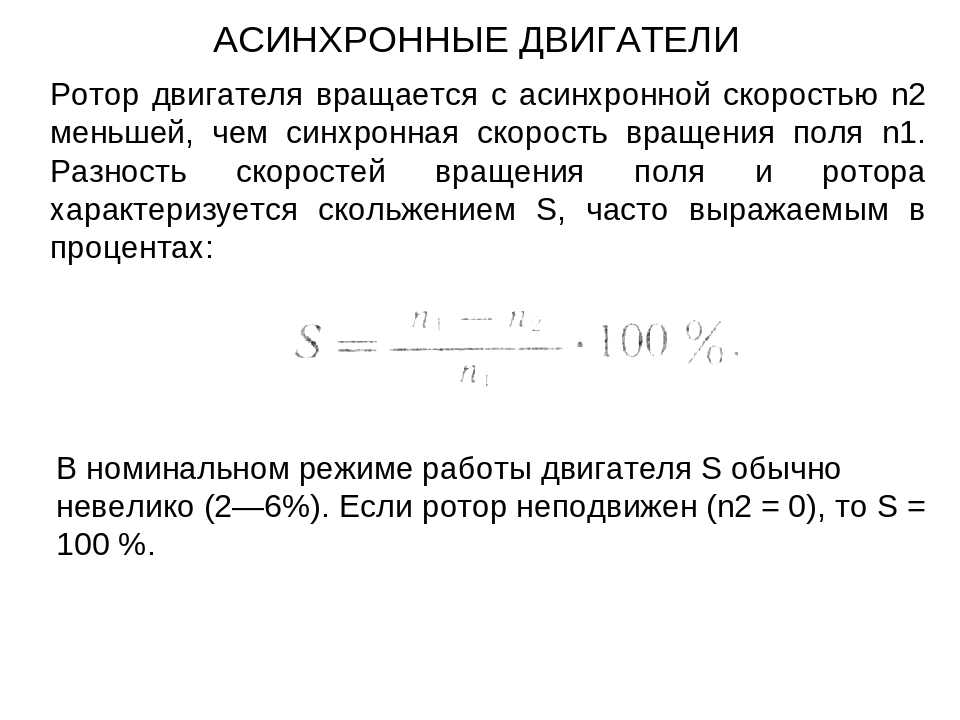
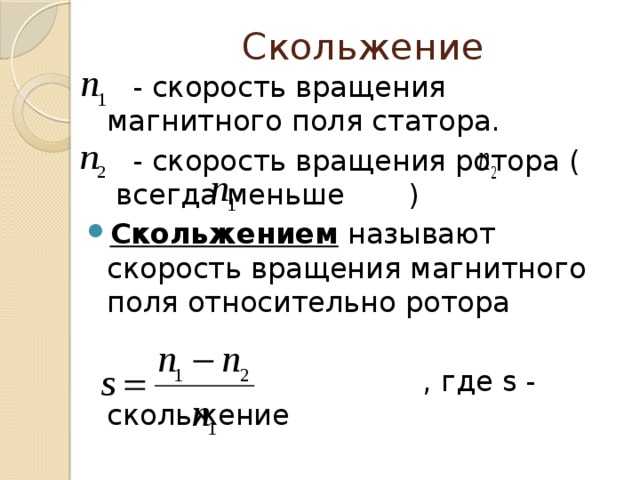
Принцип действия асинхронного электродвигателя заложен в его названии (не синхронный). То есть статор и ротор при включении создают вращающиеся с разной частотой магнитные поля. При этом частота вращения магнитного поля ротора всегда меньше частоты вращения магнитного поля статора.
Чтобы более наглядно представить себе этот процесс, возьмите постоянный магнит и покрутите его вокруг своей оси возле медного диска. Диск с небольшим отставанием начнет вращаться вслед за магнитом. Дело в том, что при вращении магнита в структуре диска возбуждаются токи Фуко (индукционные токи), движущиеся по замкнутому кругу. По сути они являются токами короткого замыкания, разогревающими металл. В диске «зарождается» собственное магнитное поле, в дальнейшем взаимодействующее с полем магнита.
В асинхронном двигателе для получения вращающегося поля используются обмотки статора. Магнитный поток, образованный ими, создает ЭДС в проводниках ротора. При взаимодействии магнитного поля статора и индуцируемого тока в обмотке ротора создается электромагнитная сила, приводящая во вращение вал электродвигателя.
Пошагово процесс выглядит следующим образом:
- При запуске двигателя магнитное поле статора пересекается с контуром ротора и индуцирует электродвижущую силу.
- В накоротко замкнутом роторе возникает переменный ток.
- Два магнитных поля (статора и ротора) создают крутящий момент.
- Крутящийся ротор пытается «догнать» поле статора.
- В тот момент, когда частоты вращения магнитного поля статора и ротора совпадут, электромагнитные процессы в роторе затухают и крутящий момент становится равным нулю.
- Магнитное поле статора возбуждает контур ротора, который к этому моменту снова отстает.
То есть ротор всегда медленнее магнитного поля статора, что и обеспечивает асинхронность.
Поскольку ток в роторе индуцируется бесконтактно, отпадает необходимость установки скользящих контактов, что делает асинхронные двигатели более надежными и эффективными. Изменяя направление тока в одной из обмоток (для этого нужно поменять фазы на клеммах), вы можете «заставить» мотор вращаться в ту или другую сторону.
Направление электромагнитной силы легко определить, вспомнив школьный курс физики и воспользовавшись «правилом левой руки».
На частоту вращения магнитного поля статора влияет частота питающей сети и число пар полюсов. Поскольку число пар полюсов зависит от типа двигателя и остается неизменным, то, если вы хотите изменить частоту вращения поля, необходимо изменить частоту питающей сети с помощью преобразователя.
Преимущества асинхронных двигателей
Благодаря тому, что устройство и принцип работы асинхронного электродвигателя достаточно просты, он обладает массой преимуществ и широко применяется во всех сферах народного хозяйства и в быту. Двигатели этого типа характеризуются:
- Надежностью и долговечностью. Отсутствие контакта между подвижными и неподвижными деталями сводит к минимуму возможность износа и поломок.
- Низкой стоимостью. Они доступны (не зря 90% от всех выпускающихся в мире двигателей именно асинхронные).
- Простотой эксплуатации. Для того чтобы использовать их, не обязательно иметь специальные знания и навыки.
- Универсальностью. Их можно установить практически на любое оборудование.
Изобретение асинхронного электродвигателя было значимым вкладом в развитие науки, промышленности и сельского хозяйства. С ним наша жизнь стала более комфортной.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
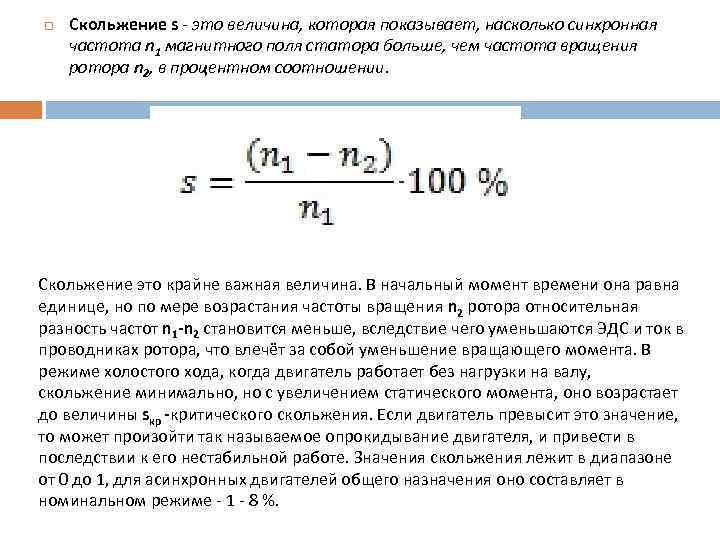
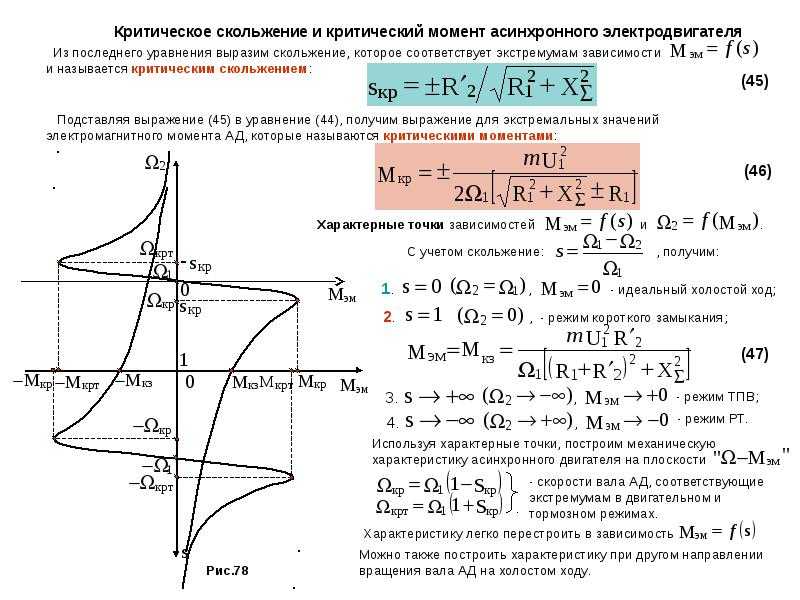
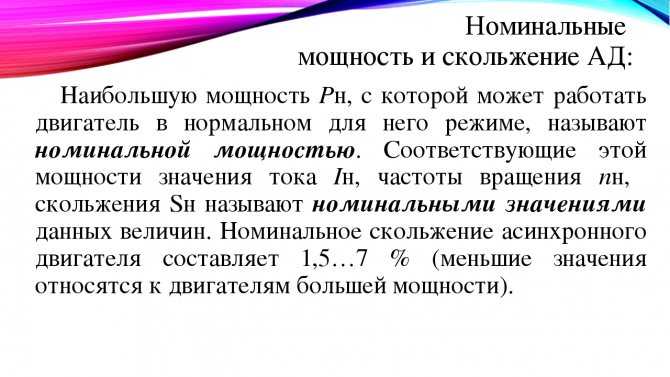
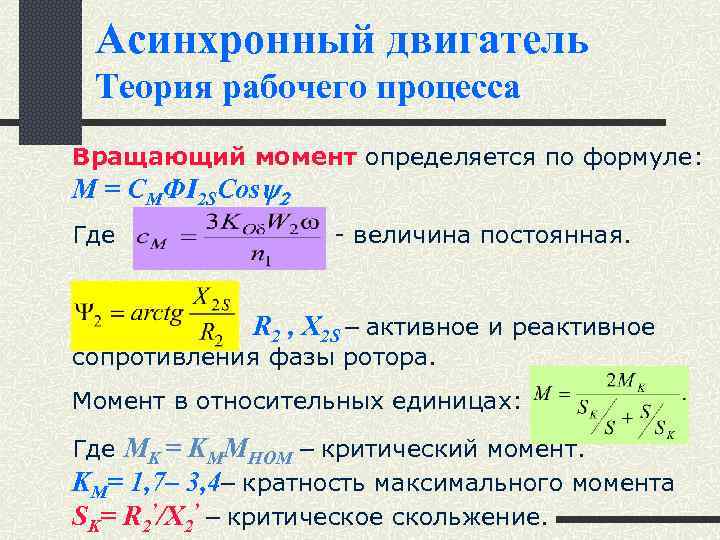
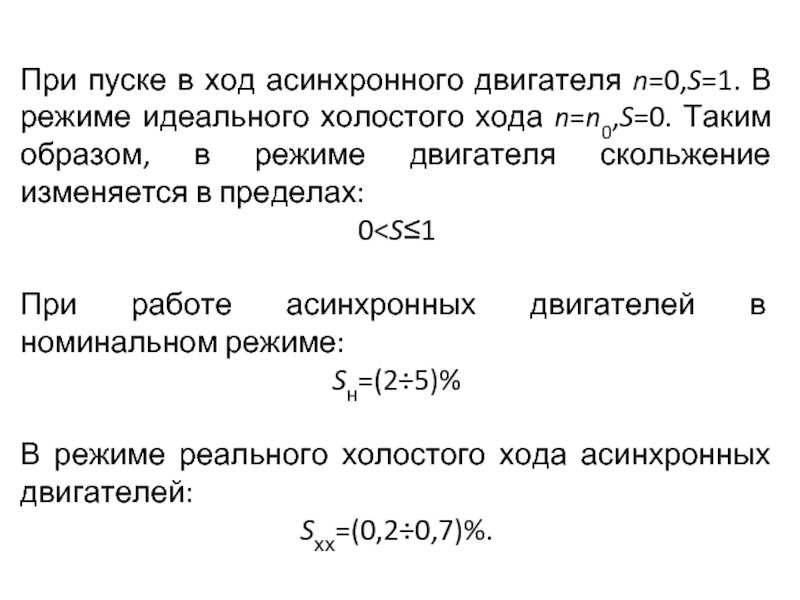
Параметры в различных рабочих режимах
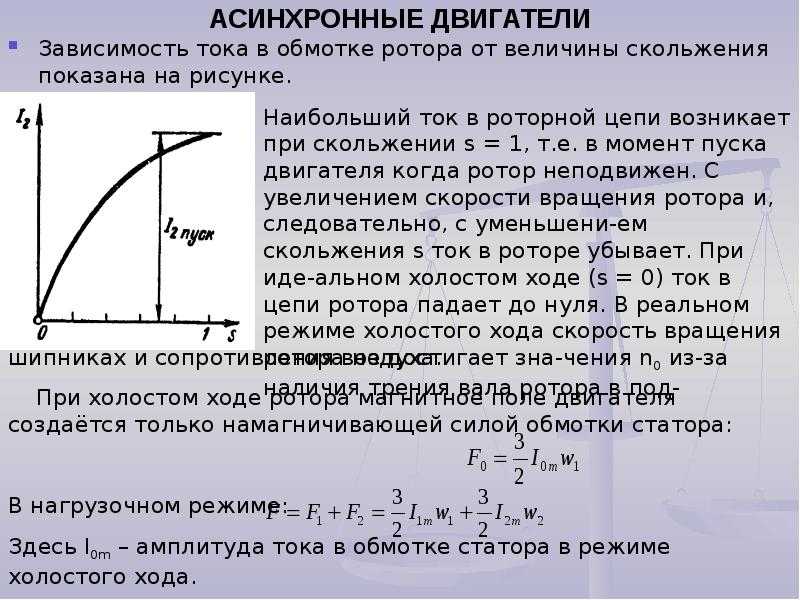
Когда электродвигатель обесточен, вращение не происходит, потому что статорное поле не пересекается с роторным полем. В этом случае величина равна двум или трём процентам, т.е. колеблется около нуля.
Если даже параметр холостого хода идеален, процентное значение нулю равняться не будет. Величина может быть и отрицательной, если двигатель функционирует в режиме генератора. В таком режиме (ротор вращается против статора) значение S будет меньше нуля.
При электромагнитном торможении, величина Sпревышает единицу с положительным знаком. Величина токовой частоты в роторных обмотках равняется токовой частоте сети исключительно при пусковом моменте.

Роторная токовая частота пропорциональна сопротивлению индукции, поэтому роторный ток зависим от скольжения асинхронного двигателя.
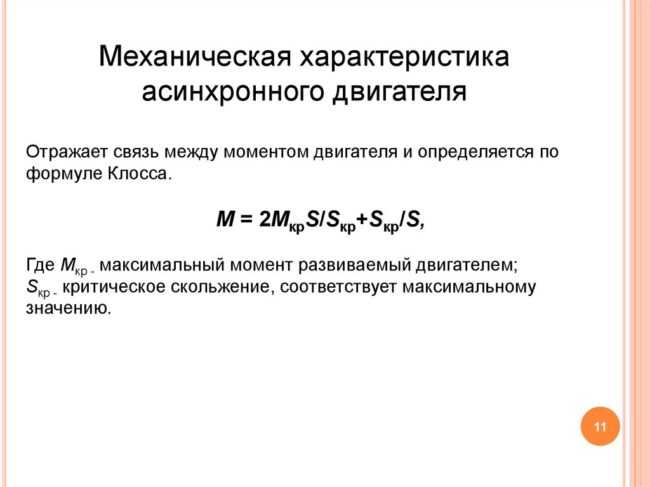
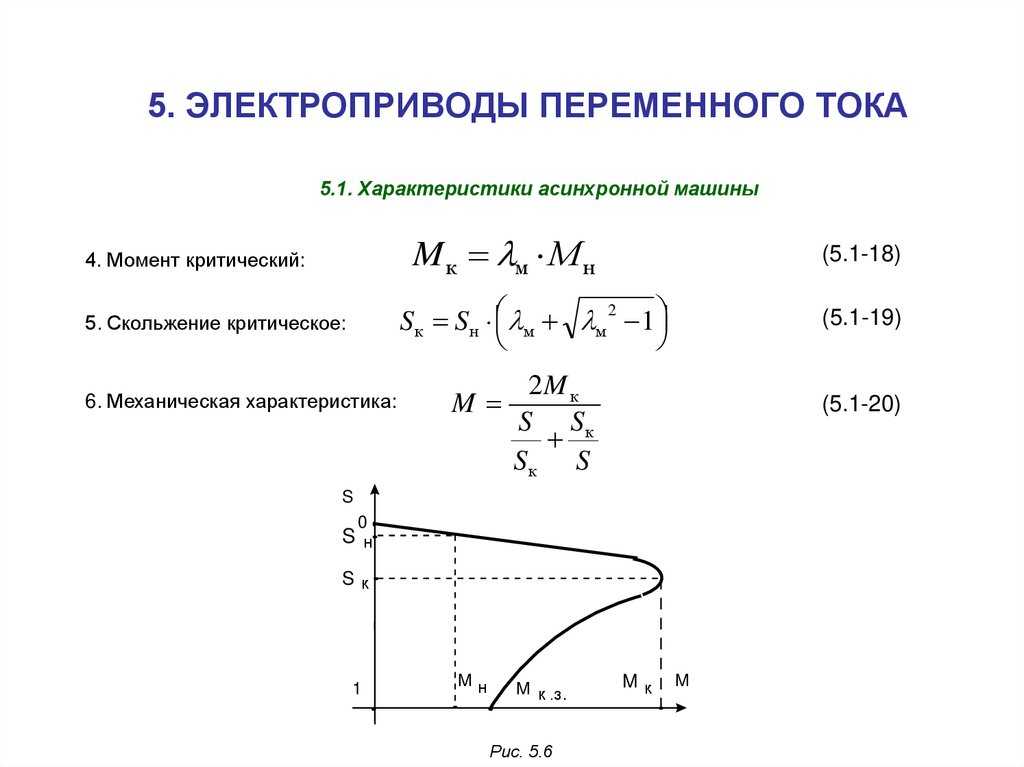
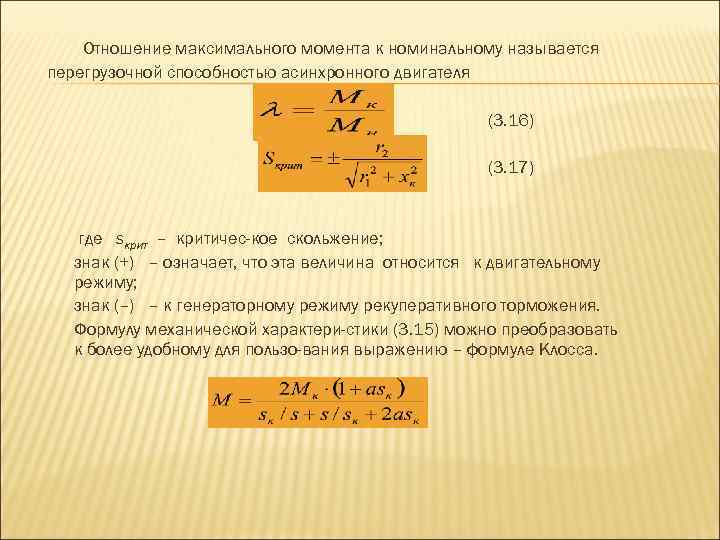
Момент вращения АД находится в зависимости от значения S, поскольку определяется величинами токового и магнитного потоков, угловым смещением ЭДС и роторным током.
Для подробного изучения параметров электродвигателя определяется зависимость, показанная на графике вверху.
При разных показателях асинхронном двигателе момент вращения можно корректировать при помощи сопротивления, включённого в цепи роторных обмоток.
Если ротор замкнут «накоротко», вращающий момент изменяется либо частотными преобразователями, либо применением двигателей с изменяющимися параметрами.

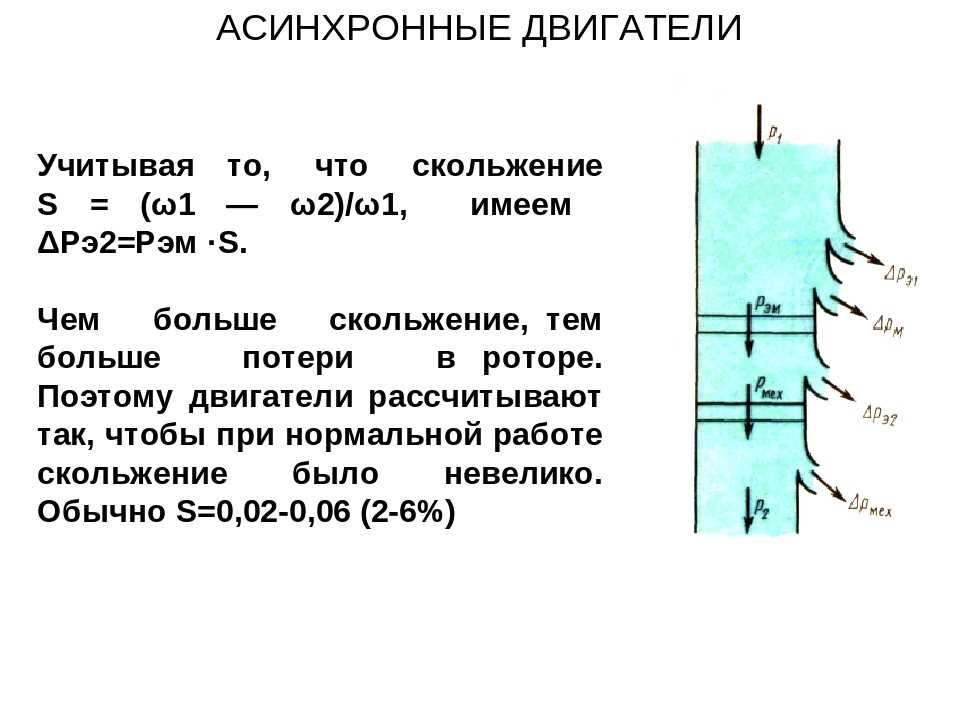
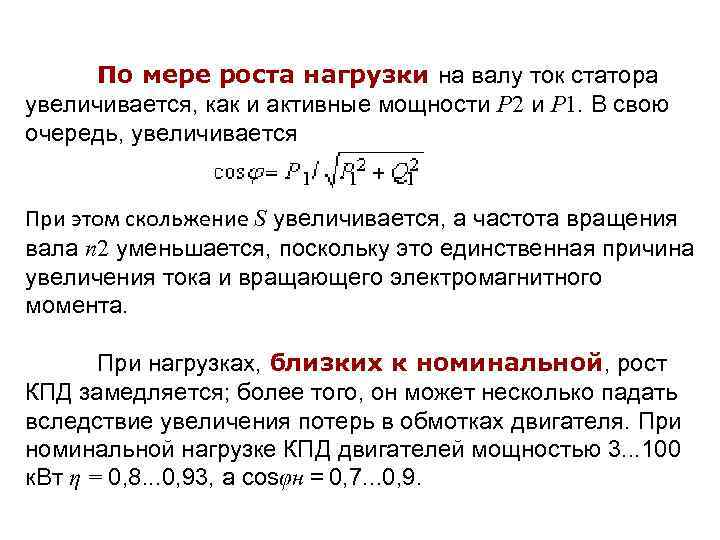
При нагрузочном номинале двигателя показатель скольжения находится между двумя и восемью процентами. При добавлении нагрузки скольжение ускоряется, потому что роторное поле начнёт больше отставать от статорного поля.
Ускорение неминуемо приведёт к росту роторного тока и момента вращения. Параллельно с этим возрастает сопротивление, что связано с активными роторными потерями, токовые показатели снижаются, в связи с чем, вращение растёт гораздо медленней скольжения.
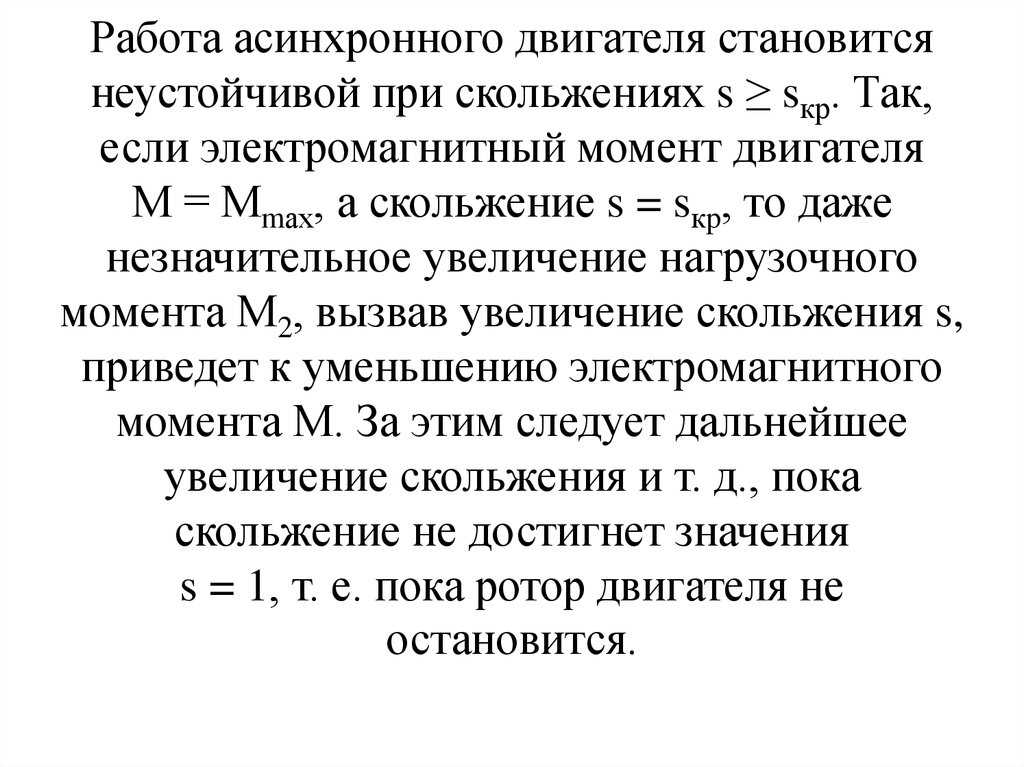
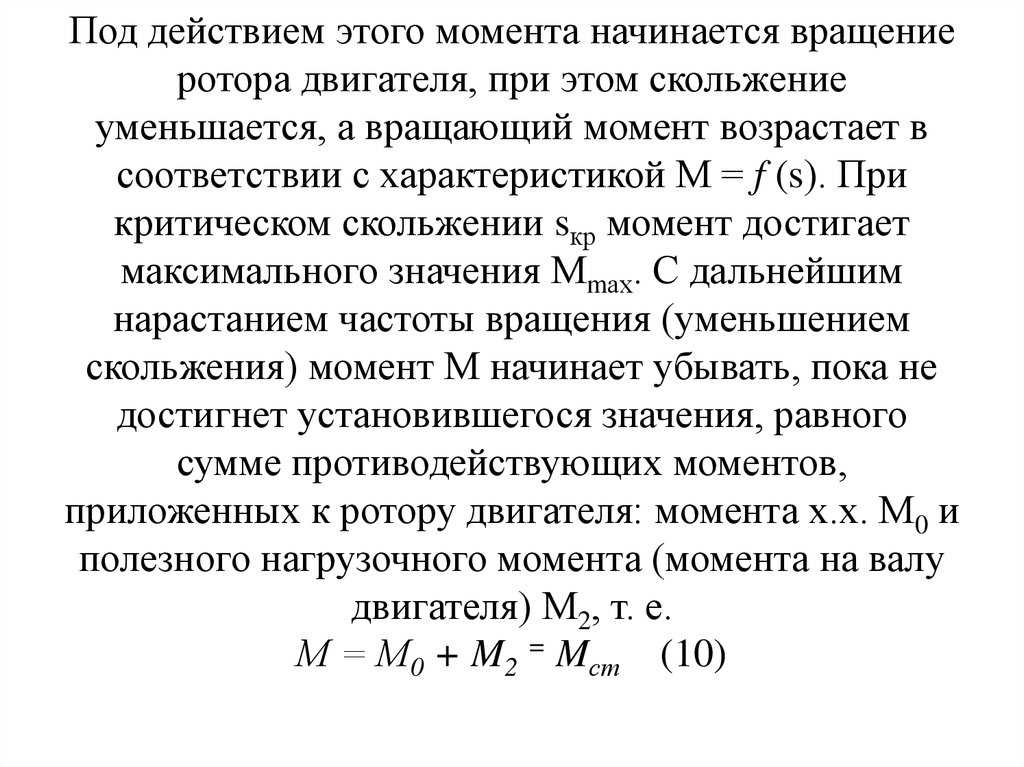
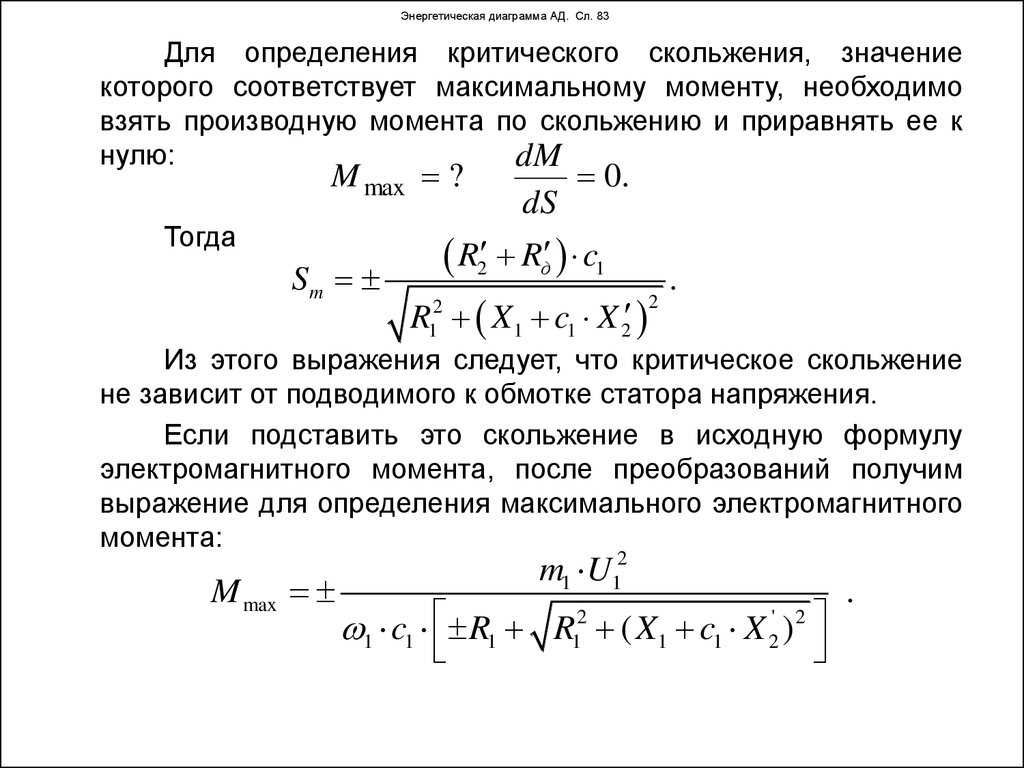
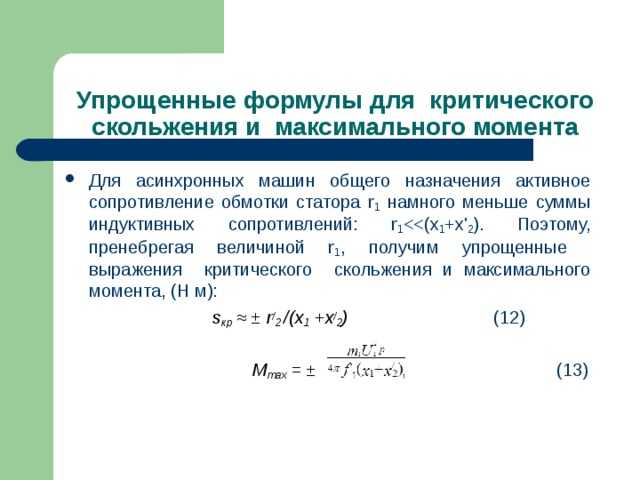
При определённой скорости скольжения момент вращения достигнет максимума и начнёт замедляться. Максимальное значение является критическим и обозначается Sкр.
В технической документации указываются параметры асинхронного двигателя. По ним строится график, отвечающий на вопросы, связанные с работой асинхронного электрического двигателя, применяемого в качестве привода.
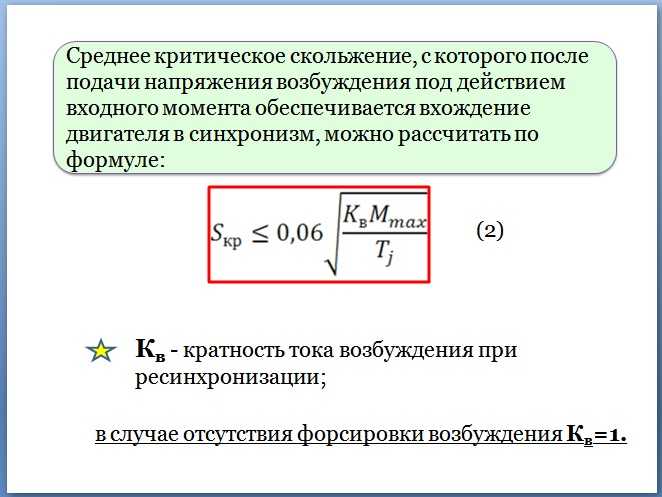
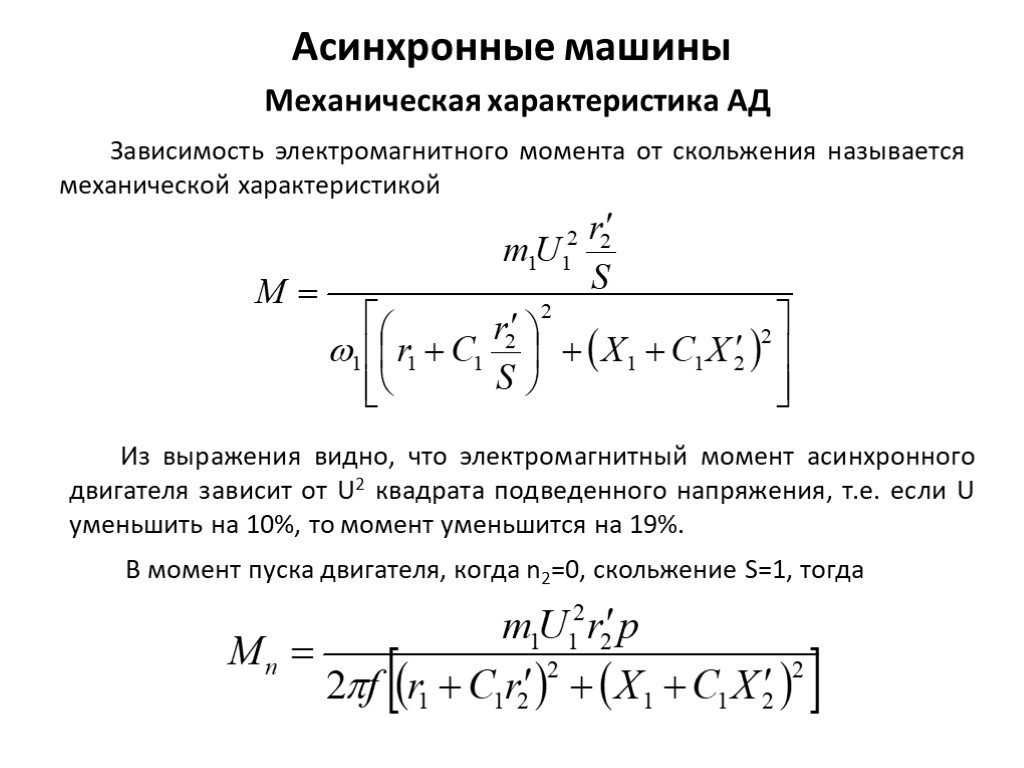
§ 108. Вращающий момент асинхронного двигателя
Принцип действия асинхронного двигателя, как указывалось, основан на взаимодействии вращающегося поля и тока, индуктированного этим полем в обмотке ротора. В результате взаимодействия магнитного потока Φ с током I2, протекающим в проводниках обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение.
Поэтому вращающий момент, создаваемый на валу двигателя, зависит от величины тока ротора I2 и от магнитного потока Φ.
Кроме того, на величину вращающего момента асинхронного двигателя влияет сдвиг фаз Ψ2 между током I2 и э.д.с. ротора. Для уяснения влияния cos Ψ2 рассмотрим картину электромагнитных сил, действующих на проводники ротора.
Рассмотрим сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз между током и э.д.с. можно пренебречь (рис. 255, а). Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающимся, предположим, по направлению часовой стрелки. Пользуясь правилом «правой руки», определяем направление э.д.с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу «левой руки». Как видно из чертежа, ротор под действием электромагнитных сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
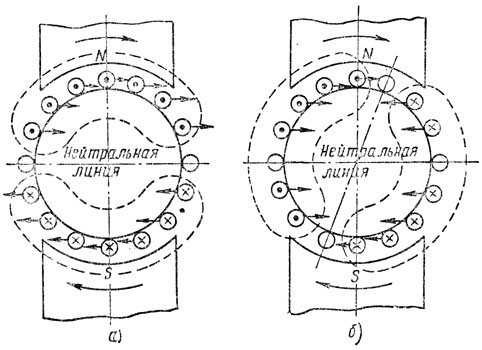
Рис. 255. Электромагнитные силы, действующие на проводники ротора: а — при отсутствии индуктивности, б — при наличии индуктивности


Рассмотрим второй случай, когда индуктивность обмотки ротора относительно велика. В этом случае сдвиг фаз между током ротора I2 и э.д.с. ротора будет также значительным. На рис. 255, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э.д.с. остается таким же, как и на рис. 255, а, но вследствие запаздывания тока по фазе максимум тока I2 наступает позднее, чем максимум э.д.с.
На рис. 255 показано направление индуктированных токов в отдельных проводниках ротора в рассматриваемый момент времени, а также направления отдельных электромагнитных сил, действующих на проводники. Если Ψ2 = 0, то все электромагнитные силы будут действовать согласованно. При большем Ψ2 часть электромагнитных сил создают вращающий момент, направленный по часовой стрелке, а остальные силы — против часовой стрелки.
Магнитный поток Φ не зависит от скорости вращения ротора n. Следовательно, вращающий момент М пропорционален только активной составляющей тока ротора I2 cos Ψ2. Индуктивное сопротивление ротора Х2 = 2πfL2, а следовательно, и величина cos Ψ2 зависят от частоты тока ротора f2 и поэтому с изменением нагрузки на валу ротора изменяется не только величина тока I2, но и величина cos Ψ2. Таким образом, изменение вращающего момента, развиваемого двигателем, с изменением скорости вращения (и скольжения) определяется одновременно как изменением тока I2, так и изменением cos Ψ2.
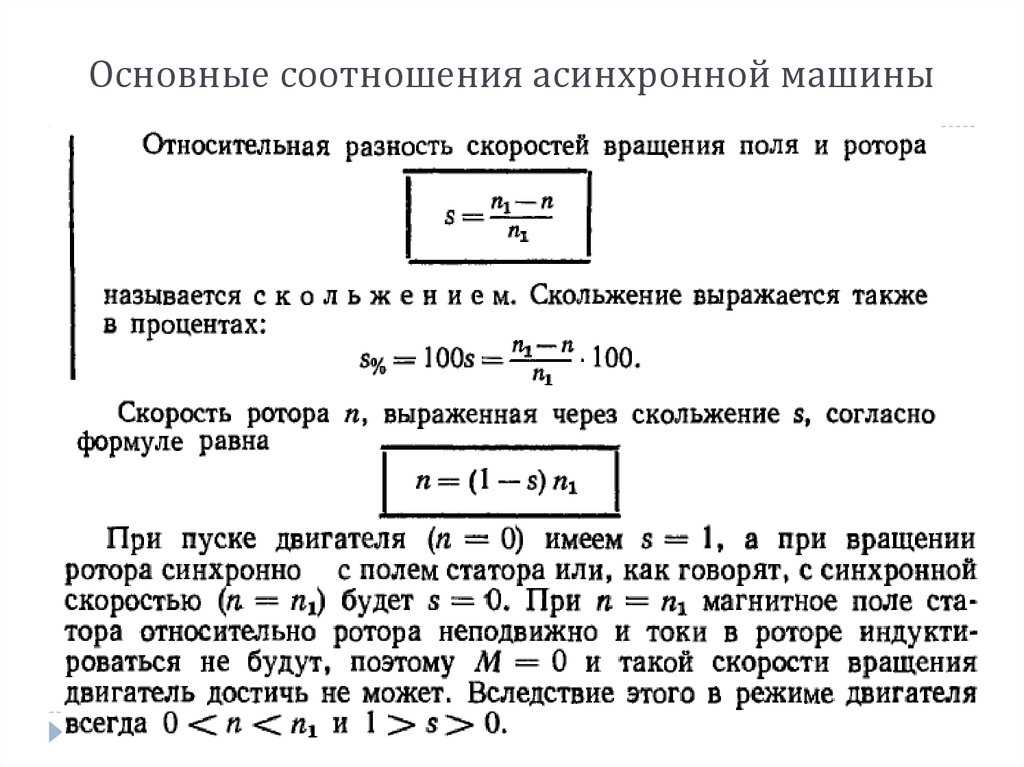
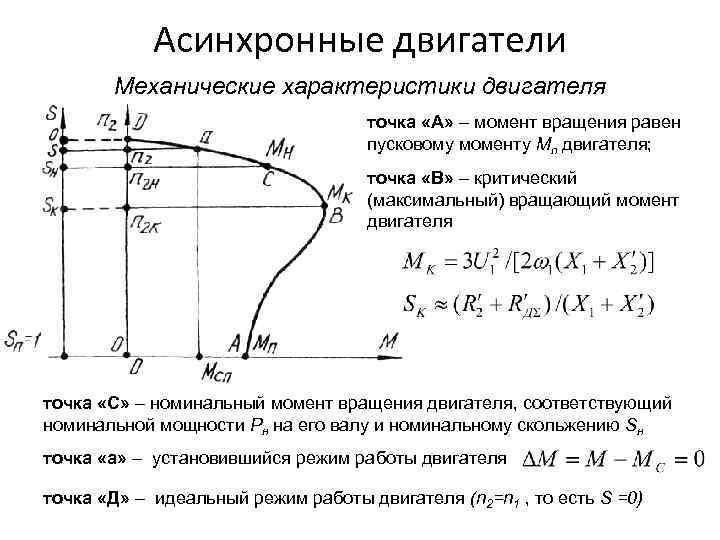
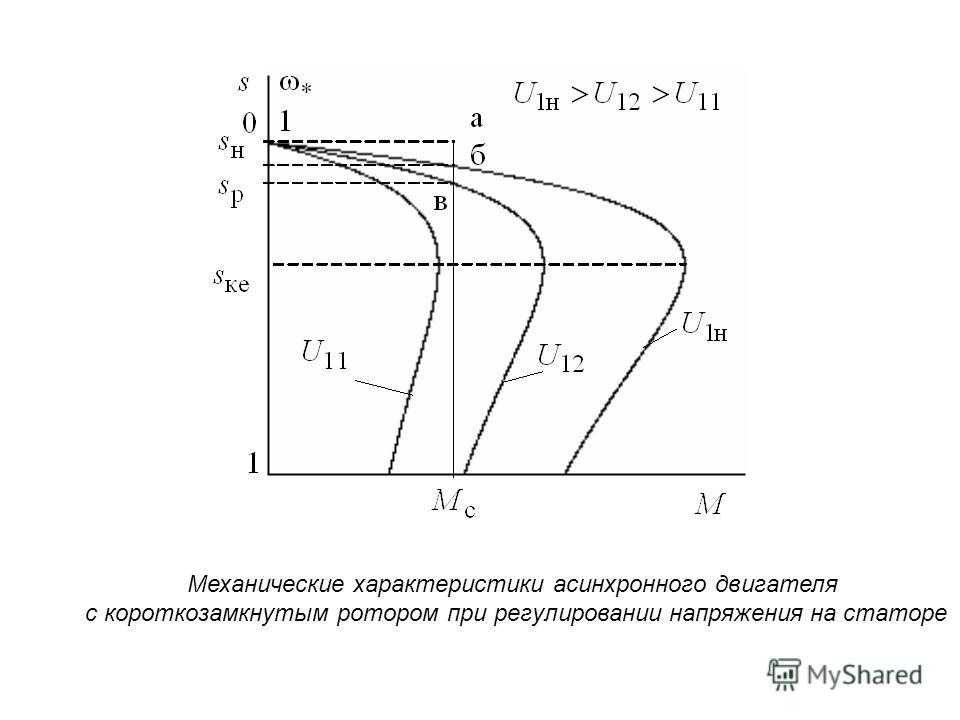
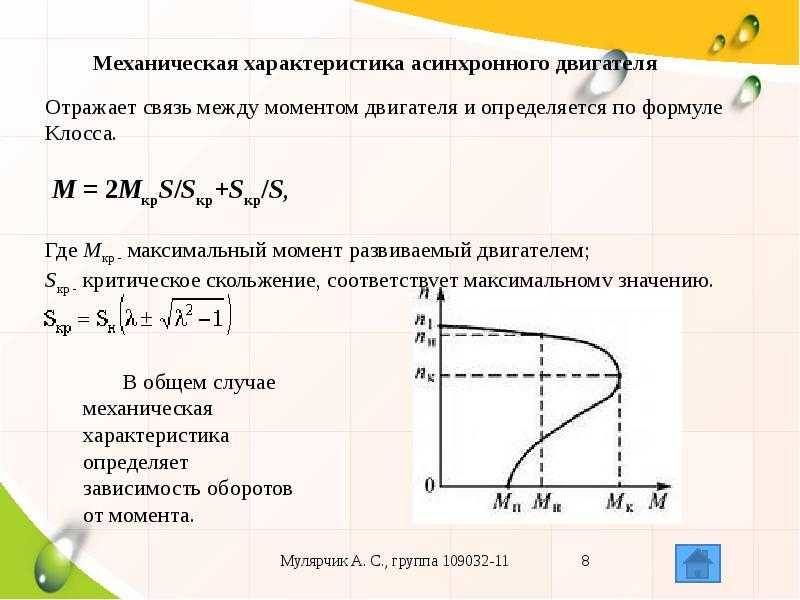
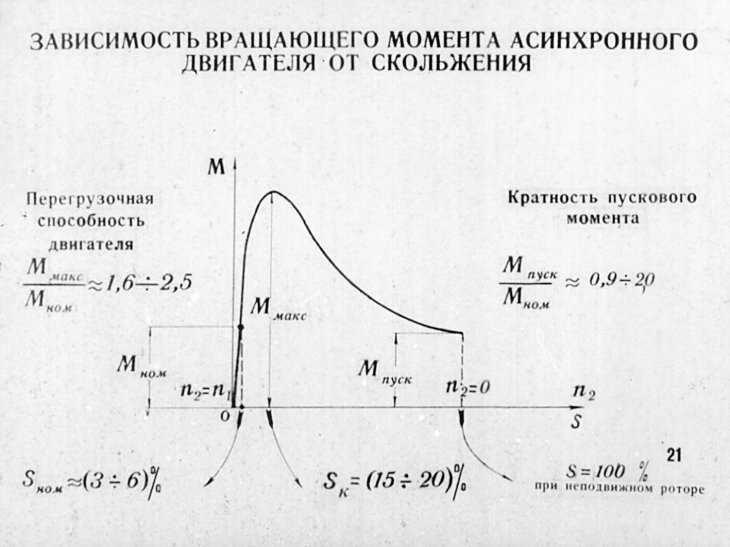
На основании математического анализа и экспериментального исследования можно построить график зависимости вращающего момента асинхронного двигателя М от скольжения S (рис. 256). Так как каждому значению S соответствует определенное значение n = n (1 — S), то указанный график можно представить и как зависимость вращающего момента от скорости n. Зависимость между вращающим моментом М и скольжением S называется механической характеристикой двигателя (рис. 256).
Рис. 256. Механические характеристики асинхронного двигателя
На кривой А видно, что в начальный момент пуска, когда S = 1 и n = 0, вращающий пусковой момент двигателя относительно невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos Ψ2 имеет малое значение (около 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет наибольшим. По мере разгона двигателя скольжение уменьшается.
При некотором скольжении S1, называемом критическим, вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения (или, иначе говоря, при дальнейшем увеличении скорости вращения двигателя) вращающий момент будет быстро уменьшаться и при скольжении S = 0 момент двигателя будет равен нулю. Этот режим соответствует идеальному холостому ходу, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь.
История появления
История создания асинхронного электродвигателя начинается в 1888 году, когда Никола Тесла запатентовал схему электродвигателя, в этом же году другой ученый в области электротехники Галлилео Феррарис опубликовал статью о теоретических аспектах работы асинхронной машины.
В 1889 году российский физик Михаил Осипович Доливо-Добровольский получил в Германии патент на асинхронный трехфазный электрический двигатель.
Все эти изобретения позволили усовершенствовать электрические машины и привели к тому, что в промышленность стали массово применяться электрические машины, которые значительно ускорили все технологические процессы на производстве, повысили эффективность работы и снизили её трудоемкость.
В настоящий момент самый распространенный электродвигатель, эксплуатируемый в промышленности, является прототипом электрической машины, созданной Доливо-Добровольским.
5.14. ОДНОФАЗНЫЕ АСИНХРОННЫЕ ДВИГАТЕЛИ
Статор однофазного двигателя
имеет однофазную обмотку, которая занимает 2/3 общего числа пазов статора. Ротор
— коротко-замкнутый.
При подключении к сети
однофазная статорная обмотка создает не вращающийся, а пульсирующий магнитный
поток с амплитудой Ф. Этот поток может быть искусственно разложен на два вращающихся
потока ФI и ФII, каждый из которых равен Ф/2. Обозначим
ФI прямым потоком, а ФII — обратным. Частота вращения
каждого потока — n1I=n1II=n1.
Предположим, что ротор
двигателя уже вращается в направлении прямого потока. Тогда скольжение двигателя
относительно прямого потока ФI равно:
,
а относительно обратного потока:
.
Потоки ФI и
ФII наводят в обмотке ротора ЭДС E2I и E2II,
которые создают токи I2I и I2II. Известно, что частота
тока в обмотке ротора пропорциональна скольжению f2=Sf1.
Т.к. SII>SI, то ток, наведенный обратным полем, имеет
частоту намного больше частоты, наведенной в обмотке ротора прямым полем f2II>f2I.
Пусть n1=1500 об/мин, n2=1450 об/мин, f1=50 Гц, тогда:
Нам также известно, что
индуктивное сопротивление роторной обмотки x2 зависит от частоты
f2:
Поскольку f2I<<f2II,
то и сопротивление x2I<<x2II
Переходя к токам I2,
которые, как известно, обратно пропорциональны сопротивлениям x2,
можно записать: I2I>>I2II.
Вращающие моменты двигателя
пропорциональны магнитным потокам статора и токам в обмотке ротора. (М~ФI2).
![Как работает электродвигатель [для чайников]](https://oksimetr.ru/wp-content/uploads/9/c/1/9c18a1a4f90658a396db24656883708b.jpeg)
Исходя из значений токов
I2I и I2II и учитывая, что ФI=ФII
можно записать:
Следовательно, если ротор
двигателя уже вращается в сторону прямого потока, то он будет продолжать вращаться
в этом направлении. Тормозящее воздействие МII не будет оказывать
заметного влияния на работу двигателя.
Вспомним, что мы условно
предполагали вращение ротора в сторону прямого потока ФI. А если
бы он вращался вначале в сторону обратного потока ФII?
Тогда, проведя аналогичные
рассуждения, можно заключить, что ротор будет устойчиво вращаться в сторону
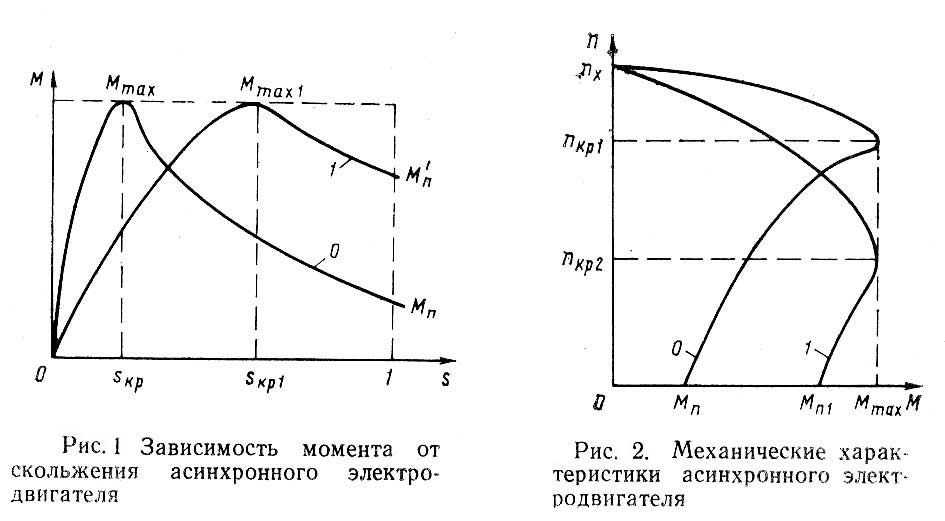
обратного потока. Рассмотрим механическую характеристику однофазного двигателя
(рис. 5.14.2).
Из характеристики М=f(S)
видно, что при пуске, когда S=1, пусковой момент Мп=О. Двигатель
при включении его в сеть сам не начнет вращаться. Необходим его сдвиг в ту или
иную сторону.
Если сдвинуть точку Мп
влево от S=1, то момент будет положительным, если вправо — отрицательным.
Другими словами, направление
устойчивого вращения ротора двигателя будет зависеть от направления первоначального
импульса.
Проведенный анализ показал, что однофазный двигатель нуждается в принудительном пуске.
Пусковые устройства могут быть механическими (пуск от руки) и электрическими.
Первый способ пуска практически выжил себя, и на его смену пришел второй — электрический.
Для создания необходимого пускового момента однофазный двигатель снабжается дополнительной пусковой обмоткой.
Эта обмотка размещается в оставшейся незаполненной 1/3 пазов.
Однофазный двигатель, таким
образом, превратился в двухфазный. Двухфазный двигатель обладает вращающимся
магнитным полем, если выполнены два обязательных условия.
Первое условие состоит
в пространственном сдвиге рабочей и пусковой обмоток на 90 эл. градусов. Такое
условие, легко реализуется на заводе-изготовителе.
Второе обязательное условие
диктуется сдвигом по фазе тока в пусковой обмотке на 90° относительно тока в
рабочей обмотке. Выполнение этого условия связано с включением в пусковую обмотку
фазосдвигающего элемента, например, конденсатора (рис. 5.14.3).
После того как ротор двигателя
придет во вращение, пусковую обмотку ПО отключают. Делается это с
помощью выключателя В. Иногда в бытовой технике отключение пусковой обмотки
производится автоматически по ходу разгона двигателя.
Устройство асинхронного двигателя
В промышленных масштабах производиться несколько видов асинхронных электрических машин. Они могут отличаться местом установки обмоток, способом их укладки, мощностью, типом ротора и т.д. В качестве примера мы рассмотрим наиболее типовое устройство. Конструктивно асинхронный двигатель состоит из таких компонентов:

Устройство асинхронного двигателя
- вал (1) – предназначен для передачи вращательного усилия;
- статор (10) – набирается из шихтованной стали, имеет цилиндрическую форму, в пазы статора укладывается обмотка;
- короткозамкнутый ротор (9) – используется для электромагнитного взаимодействия с полем статора;
- борно (11) – содержит выводы обмоток и клеммы для их подключения;
- подшипники ( 2 и 6) – устанавливаются для фиксации вращающихся частей и подшипниковые щиты (3 и
 для соединения подшипника с корпусом двигателя;
для соединения подшипника с корпусом двигателя; - корпус (5) – выполняет функцию защиты от механических повреждений, может оснащаться радиаторными ребрами для отвода тепловой энергии;
- лапы (4) – используются для крепления асинхронного двигателя к строительным и конструктивным элементам;
- вентилятор (7) – устанавливается только на мощных агрегатах, где существует необходимость в принудительном охлаждении.
 для соединения подшипника с корпусом двигателя;
для соединения подшипника с корпусом двигателя;Но, следует отметить, что это лишь один из видов таких двигателей, на практике вы можете встретить электрические машины с короткозамкнутым или фазным ротором. Также распространенной конструкцией является беличья клетка в алюминии.


Режимы работы

Электродвигатель асинхронного типа универсальный механизм и по продолжительности работы имеет несколько режимов:
- Продолжительный;
- Кратковременный;
- Периодический;
- Повторно-кратковременный;
- Особый.
Продолжительный режим — основной режим работы асинхронных устройств, который характеризуется постоянной работой электродвигателя без отключений с неизменной нагрузкой. Такой режим работы самый распространенный, используется на промышленных предприятиях повсеместно.
Кратковременный режим – работает до достижения постоянной нагрузки определенное время (от 10 до 90 минут), не успевая максимально разогреться. После этого отключается. Такой режим используют при подаче рабочих веществ (воду, нефть, газ) и прочих ситуациях.
Периодический режим – продолжительность работы имеет определенное значение и по завершении цикла работ отключается. Режим работы пуск-работа-остановка. При этом он может отключаться на время, за которое не успевает остыть до внешних температур и включаться заново.
Повторно-кратковременный режим – двигатель не нагревается максимально, но и не успевает остыть до внешней температуры. Применяется в лифтах, эскалаторах и прочих устройствах.
Особый режим – продолжительность и период включения произвольный.
В электротехнике существует принцип обратимости электрических машин — это означает, что устройство может, как преобразовывать электрическую энергию в механическую, так и совершать обратные действия.
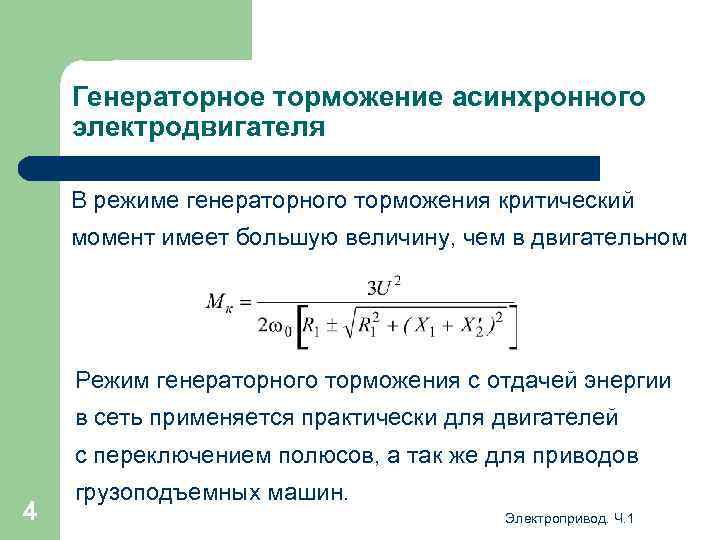
Асинхронные электродвигатели тоже соответствуют этому принципу и имеют двигательный и генераторный режим работы.
Двигательный режим – основной режим работы асинхронного электродвигателя. При подаче напряжения на обмотки возникает электромагнитный вращающий момент, увлекающий за собой ротор с валом и, таким образом, вал начинает вращаться, двигатель выходит на постоянную частоту вращения, совершая полезную работу.
Генераторный режим – основан на принципе возбуждения электрического тока в обмотках двигателя при вращении ротора. Если вращать ротор двигателя механическим способом, то на обмотках статора образуется электродвижущая сила, при наличии конденсатора в обмотках возникает емкостный ток. Если емкость конденсатора будет определенного значения, зависящего от характеристик двигателя, то произойдет самовозбуждение генератора и возникнет трехфазная система напряжений. Таким образом короткозамкнутый электродвигатель будет работать как генератор.
 Watch this video on YouTube
Watch this video on YouTube
Как определить частоту вращения электродвигателя?
Очевидно, что правильная эксплуатация любой электрической машины предполагает соответствие такого важного ее технического параметра как частота вращения условиям эксплуатации. Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу
И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке
Все основные параметры асинхронного электродвигателя изготовителем указываются на металлической бирке – шильдике, прикрепленной к его корпусу. И конечно, в приведенных технических данных обязательно присутствует информация о частоте вращения при номинальной нагрузке.
Однако, на практике, совсем нередки случаи, когда необходимо определить частоту вращения двигателя с отсутствующим шильдиком или с нечитаемыми – стершимися надписями на нем.
Конечно, в таких случаях опытный мастер-электроприводчик, наверняка сможет определить частоту вращения, но у начинающих специалистов-электриков, занимающихся обслуживанием электрического оборудования при решении этого вопроса могут возникнуть некоторые затруднения.
Проще всего определить скорость вращения вала работающего “асинхронника” тахометром. Но, учитывая, что ввиду узкой специфики использования, наличие этого измерительного прибора – большая редкость, данный метод здесь не рассматривается.
![Как работает электродвигатель [для чайников]](https://oksimetr.ru/wp-content/uploads/c/a/5/ca5a0d547a0944f990fe5cf1d8e8e96b.jpeg)

Надеемся, предложенный ниже способ окажется полезным. Он применим для асинхронных электродвигателей небольшой и средней мощности, имеющих однослойные статорные обмотки.
Итак, в нашем случае определение частоты вращения электродвигателя предполагает осмотр его статорной обмотки. Поэтому, с двигателя потребуется снять крышку (пошипниковый щит). Если на его валу закреплены шкив или полумуфта для передачи движения, то рекомендуем снять задний щит.
Сняв крышку и крыльчатку вентилятора с вала, следует, открутив винты, снять задний подшипниковый щит, после чего осмотреть торцевую часть статорной обмотки. Далее, надо посчитать количество пазов, занимаемых секциями одной катушки.
Общее количество пазов сердечника, разделенное на количество пазов, занимаемых секциями одной катушки (частное) составит число полюсов. Зная его значение, определяем частоту вращения асинхронного электродвигателя:
2 – 3000 об/мин; 4 – 1500 об/мин; 6 – 1000 об/мин.
Здесь стоит учесть одну особенность асинхронных двигателей – несоответствие скорости вращения магнитного поля и вращения ротора, поэтому скорость может составлять 940 обмин вместо 1000 или 2940 об/мин вместо 3000.
Как видно, особой сложностью этот способ определения частоты вращения по обмотке не отличается, однако, может быть упрощен; потребуется визуально определить какая часть окружности сердечника статора, занимается секциями одной катушки:
Занятая секциями одной катушки ½ часть сердечника статора двигателя свидетельствует о его частоте вращения 3000 обмин, ⅓ – 1500 об/мин, ¼ – 1000 об/мин.
>Как определить мощность и обороты электродвигателя без его разборки.