
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD)
При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы. Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель
Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В. Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять. Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости. По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ. CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
 Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах. Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха. Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель. Производительность такого устройства не связана с системой управления электропривода. В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Пуск синхронного двигателя.
В зависимости от характера привода, мощности двигателя и особенностей питающей сети применяются различные системы пуска: прямой, реакторный, автотрансформаторный, с постоянно подключенным возбудителем и др. Наладчик должен иметь в виду, что любой вид пуска сопряжен с опасностью появления чрезмерных напряжений на обмотках индукторов и нагревания пусковой клетки свыше допустимых пределов. Перенапряжения возможны в тех случаях, когда цепь индукторов окажется при пуске разомкнутой, не будет перекрытия контактов автомата гашения поля или перегорит разрядное сопротивление. Для надежности цепь возбуждения следует проверить до пуска двигателя путем включения на рабочее или пониженное напряжение через амперметр. По амперметру также удобно проверить перекрытие контактов автомата гашения поля во время медленного его включения от руки (практически перекрытие контактов часто создается растягивающейся между сухарями дугой). Разрядные сопротивления обычно выбираются с запасом по мощности, но во время разгона возможно недопустимое повышение температуры контактных соединений из-за неплотной их затяжки; в дальнейшем эти контакты могут полностью разрушиться, выгореть и создать разрыв цепи ротора. Поэтому после первого толчка двигателя и пробных включений необходимо проверить температуру всех элементов разрядного сопротивления.
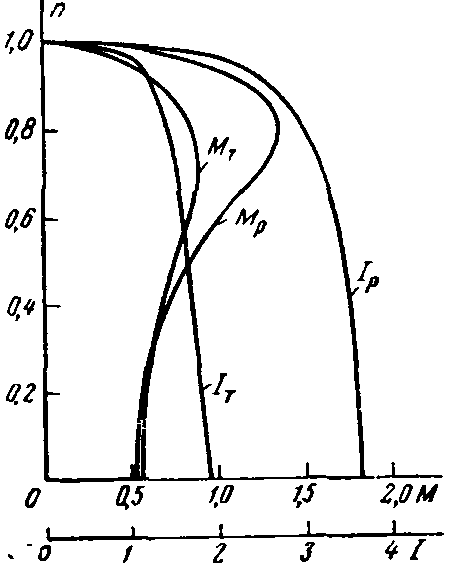
Рис. 3-14. Пусковые характеристики синхронных двигателей Iт, Μт — ток статора и электромагнитный момент при пуске через автотрансформатор; Iр, Mρ — то же, но при пуске через реактор. Пусковая клетка синхронных двигателей рассчитана только на кратковременное прохождение тока. При нескольких пусках подряд или при затянувшемся асинхронном режиме с нагрузкой на валу пусковая обмотка перегревается выше допустимых пределов. Рекомендуется производить не более трех пусков подряд с перерывом между ними не менее 1 мин. Следует иметь в виду, что нагревание обмоток не зависит от системы пуска (прямой, автотрансформаторный и др.), но будет тем больше, чем больше маховая масса привода и момент сопротивления. Характер пуска синхронного двигателя во многом зависит от наладки элементов схемы управления. При реакторном и автотрансформаторном пуске важен подбор уровня пониженного напряжения и момента подачи полного напряжения (рис. 3-14). Интенсивность пуска обычно лимитируют допускаемые толчки тока питающей сети. Втягивание двигателя в синхронизм зависит от автоматического управления током возбуждения. Подрегулировку пускового режима желательно производить по анализу осциллограмм.
Мощности в электродвигателе
Итак, полная мощность с единицей измерения вольт-ампер (ВА) – это комплексная величина, состоящая из активной мощности (действительной) и реактивной (мнимой). Если рассматривать полный показатель по формуле, то можно это отобразить вот так:
Теперь рассмотрим составляющие первой формулы. Активная мощность действует только на активных сопротивлениях, то есть она присутствует при определенных нагрузках, а, точнее сказать, когда электрический двигатель работает. Вычисляется она вот по этой формуле:
Что значит активное сопротивление? Здесь необходимо понимать, что в цепях переменного тока сопротивление выше, чем в цепях постоянного тока. Это связано со многими факторами. К примеру, это вихревые токи, которые образуются в цепи, это электромагнитное поле, это близость расположения проводников и так далее. Именно поэтому сопротивление в сетях переменного тока называют активным, а в сетях постоянного тока омическим.
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения. Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе. Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель. При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ. totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Мероприятия по увеличению косинуса фи
Чтобы увеличить косинус фи, можно воспользоваться двумя способами:
- Естественным путем без установки компенсирующих приборов и устройств.
- Искусственным путем с установкой компенсирующих агрегатов.
В первом случае необходимо использовать мероприятия, с помощью которых регулируются технологические процессы. Таким методом добивается оптимальный режим расходования потребляемой электроэнергии. Ко вторым, к примеру, можно отнести замену асинхронных электродвигателей синхронными, в которых реактивная мощность практически равна нулю. Она присутствует, но только на стадии запуска мотора.
Источник
Расчет мощности электродвигателя
Преобразование электрической энергии в кинетическую осуществляется при помощи различных типов электродвигателей. Данные устройства нашли широкое применение в современном производстве и в быту. Чаще всего электродвигатели выполняют функцию электроприводов машин и механизмов, применяются для обеспечения работы насосного оборудования, вентиляционных систем и многих других агрегатов и устройств. В связи с таким широким применением, особую актуальность приобретает расчет мощности электродвигателя. Для этих целей разработано много различных методов, позволяющих выполнить расчеты, применительно к конкретным условиям эксплуатации.
Расчет коэффициента мощности электродвигателя
Онлайн расчет коэффициента мощности (cosφ) электродвигателя
Расчет cosφ (косинуса фи) двигателя производится по следующей формуле:
cosφ=P/√3UIη
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
Подключение и пусковые токи асинхронного двигателя
Приветствую вас, дорогие читатели. Прежде, чем разбираться с методиками подключения и характеристиками токов моторов асинхронного типа, не лишним будет вспомнить о том, что это такое.
Движком асинхронного типа зовут машину особого вида, которая преобразует энергию электричества в механическую. Главным рабочим принципом такого устройства считают вот какие свойства. Проходя по статорным обмоткам, переменный ток, состоящий из трех фаз, создает условия для появления вращающегося магнитного поля. Это поле и заставляет ротор вращаться.
Естественно, что при подключении двигателя надо учитывать все эти факторы, ведь вращение ротора будет производиться в ту сторону, в которую вращается магнитное поле. Частота вращения ротора, однако, ниже частоты вращения возбуждающего поля. По конструкции эти машины бывают самыми различными (то есть предназначенными для работы в разных условиях).

Как рабочие, так и пусковые характеристики таких устройств на много превосходят такие же показатели моторов однофазного типа.
Любой из таких моторов имеет две основные части – подвижную (роторную) и неподвижную (статорную). На обеих частях имеются обмотки. Разница между ними может быть лишь в типе обмотки ротора: она может иметь роторные кольца, либо быть короткозамкнутой. Подключение движков, имеющих короткозамкнутый ротор и мощность до двух сотен киловатт, производится напрямую к сети. Моторы же большей мощности необходимо подключать, сперва, к пониженному напряжению и лишь потом переключать на номинал (с целью снижения в несколько раз пускового тока).
Как подобрать автоматический выключатель для двигателя
Правильный подбор автоматического выключателя для защити электродвигателя имеет огромное значение для оборудования. Надежность работы, защита двигателя от аварийных режимов работы и проводки напрямую зависит от подбора автоматического выключателя.
В этой статье наведем условия выбора автоматического выключателя для защиты электродвигателя. Для того чтобы выбрать автоматический выключатель необходимо знать:
— номинальный ток двигателя;
— кратность пускового тока к номинальному;
— максимально допустимый ток электропроводки.
Номинальный ток двигателя – это ток который имеет электродвигатель во время работы при номинальной мощности. Он указывается на паспорте электродвигателе или берется с таблиц паспортных данных электродвигателей.
Кратность пускового тока к номинальному – это соотношение пускового ток который возникает в электродвигателе во время пуска к номинальному. Он тоже указывается на паспорте электродвигателя или в таблицах электродвигателей.
Максимально допустимый ток электропроводки – это допустимый ток, который может проходить по проводу, кабеля, что подключен к электродвигателю.
Условия для правильного выбора автоматического выключателя для защиты электродвигателя:
— номинальный ток автоматического выключателя должен бить больше или равен номинальному току электродвигателя. Например: ток электродвигателя АИР112М4У2 Ін. дв. =11,4А выбираем автоматический выключатель ВА51Г2534 на номинальный ток Ін. = 25А и ток расцепителя Ін..рас. = 12.5А.
После этого проверим автоматический выключатель на не срабатывания при пуске электродвигателя используя условие :
Iу.е.>kзап. · kр.у ·kр.п. ·Iн.дв ·kі
Совет
где Kзап . — коэффициент запаса, который учитывает колебания напряжения, Kзап . = 1,1 ;
kр.у — коэффициент, который учитывает неточность вставки по току срабатывания электромагнитного расцепителя автоматического выключателя , Kр.у = 1,2 ;
kр.п. — коэффициент, который учитывает возможное отклонение пускового тока от его номинального, kр.п. = 1,2 ;
K і — каталожная кратность пускового тока электродвигателя;
Iн.дв — номинальный ток двигателя , А.
Iу.е = 14 · Iн.рос = 14 · 12,5 = 175А
З таблицы электродвигателей находим K і = 7,0 для электродвигателя АИР112М4У2.
Подставляем в условие и определяем
175А > 1,1·1,2·1,2·7,0·11,4
175А > 126,4А
Условие выполнилось, следовательно, автоматический выключатель не сработает при запуске двигателя.
— номинальный ток автоматического выключателя должен быть меньше предельно допустимого тока кабеля которым питается электродвигатель. Например: подключение сделано кабелем АВРГ (3х2,5) который имеет допустимый ток Iдоп =27А. Для водного автомата для защиты электродвигателя условие выполняется потому, что Iдоп =27А > Ін. = 25А .
Сверхпереходный ток и уставка защиты
- Пиковое значение сверхпереходного тока может быть крайне высоким. Обычно это значение в 12-15 раз превышает среднеквадратическое номинальное значение Inm. Иногда это значение может в 25 раз превышать значение Inm.
- Выключатели, контакторы и термореле рассчитываются на пуски двигателей при крайне высоких сверхпереходных токах (сверхпереходное пиковое значение может в 19 раз превышать среднеквадратическое номинальное значение Inm).
- При внезапных срабатываниях защиты от сверхтоков при пуске это означает выход пускового тока за нормальные пределы. В результате могут достигаться предельные значения параметров распределительных устройств, срок службы может укорачиваться и даже некоторые устройства могут выходить из строя. Во избежание такой ситуации необходимо рассмотреть вопрос о повышении номинальных параметров распределительных устройств.
- Распределительные устройства рассчитываются на обеспечение защиты пускателей двигателей от КЗ. В зависимости от риска, таблицы показывают комбинации выключателя, контактора и термореле для обеспечения координации типа 1 или 2.
Асинхронный электродвигатель
Асинхронный электродвигатель — основной привод, используемый в промышленности. К примеру, в автомобилестроении он используется в электроусилителях рулевого управления и в гибридных автомобилях. В следующем разделе представлена концепция работы асинхронного двигателя как индукционной машины. Приведен также энергетический анализ асинхронного двигателя в силу его явного преобладания среди приводов.
Устройство асинхронного электродвигателя
Различают двигатели с внешним ротором и внутренним ротором. У двигателей с внешним ротором статор находится внутри ротора, у двигателей с внутренним ротором наоборот — ротор находится внутри статора. На принципиальной схеме (рис. «Принцип работы асинхронного двигателя» ) показана принципиальная схема асинхронного двигателя с внутренним ротором.
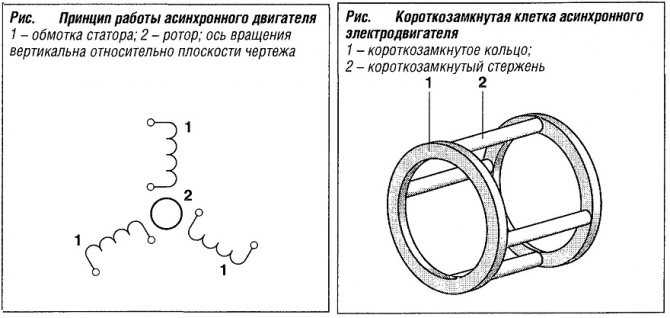
Ротор состоит из короткозамкнутого каркаса с пакетом пластин (рис. «Короткозамкнутая клетка асинхронного электродвигателя» ), в качестве примера с четырьмя короткозамкнутыми стержнями). Пакет пластин полностью заполняет пространство короткозамкнутого каркаса (на рис. не показано). Он состоит из отдельных стальных листов, изолированных друг от друга, чтобы свести к минимуму потери вихревых токов.
Рабочие характеристики асинхронного электродвигателя
Обмотка статора создает вращающееся поле с трехфазным переменным током. Между скоростью вращающегося поля и скоростью ротора возникает разница, создающая индукцию магнитно-эффективного тока в роторе, которая в свою очередь способствует созданию крутящего момента.
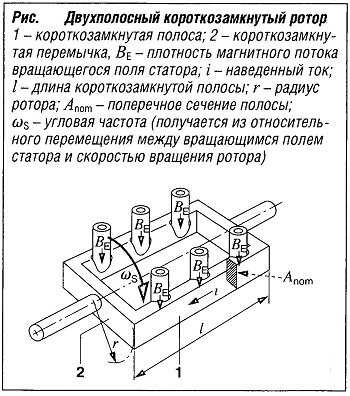
Физический принцип работы основан на законе магнитной индукции. На рис. «Двухполосный короткозамкнутый ротор» изображен ротор в виде упрощенного проводящего контура на вращающихся креплениях. Относительное перемещение между статором и ротором описывает угловая частота (os. Магнитное поле ВЕ с угловой частотой, окружающее контур ротора, наводит напряжение в короткозамкнутом роторе в соответствии со вторым уравнением Максвелла:
ΦEds = -d/dt∫∫BEdA (уравнение 12)
На основании этого уравнения и конструктивных переменных двигателя (см. рис. 13) получаем:
2E (l+2r) п = 2lr·ВЕ·ω sin(ωt) (уравнение 13)
где:
Е = I · Аnom/к (к — удельная электропроводность), напряжение создает магнитноэффективную мощность
i = (к·Аnomlr·ωs/(l+r))·sin(ωst) (уравнение 14)
в проводящем контуре, магнитное поле которого
Hind = i·N/lFe
и плотность потока (магнитная индукция)
Bind = μ·Hind
ослабляет исходное вращающееся поле ВЕ (индуктивное сопротивление). Нижеследующее уравнение применимо для получения результирующей магнитной индукции:
BR= BE-Bind
В уравнении Максвелла (уравнение 13) вместо ВЕ остается результирующая магнитная индукция BR. На проводящий контур воздействует тангенциальная сила Ft:
Ft = i l BR sin(ωst) (уравнение 15)
(сила Лоренца). Она используется для вычисления крутящего момента. Для уравнений 14 и 15 справедливо следующее:
M=2 Ft r = (2 k·Anom ωs/(l+r))·(lr·BR sin(ωst))2
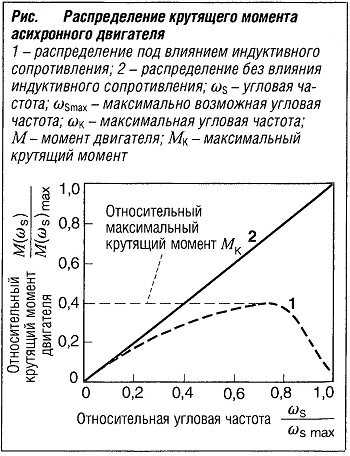
На рис. «Распределение крутящего момента асинхронного двигателя» показаны две характеристические кривые. Одна из них отображает крутящий момент под влиянием индуктивного сопротивления. На него может повлиять геометрия вала ротора и выбор материалов. Другая кривая отображает крутящий момент без влияния индуктивного сопротивления. Это ограниченный случай для технической реализации.
При увеличении угловой частоты индуктивное сопротивление сначала приводит к увеличению крутящего момента вплоть до достижения переломного момента. Это максимально возможный крутящий момент двигателя. Впоследствии он падает из-за увеличивающегося влияния индуктивного сопротивления. Рассеяние мощности Рv, возникающее в проводящем контуре, вычисляется на основе сопротивления проводящего контура Rs и тока, наведенного в контуре is
Pv = Rs— is2
Таким образом, рассеяние мощности растет пропорционально квадрату наведенного тока.
Связь мощности и крутящего момента
При выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели. Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно. Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
|
Число полюсов, N |
Скорость, об/мин |
Крутящий момент, |
|
2 |
3600 |
1,46 |
|
4 |
1800 |
2,92 |
|
6 |
1200 |
4,38 |
|
8 |
900 |
5,84 |
|
10 |
720 |
7,29 |
|
12 |
600 |
8,75 |
Примечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Бирка (шильдик) электродвигателя
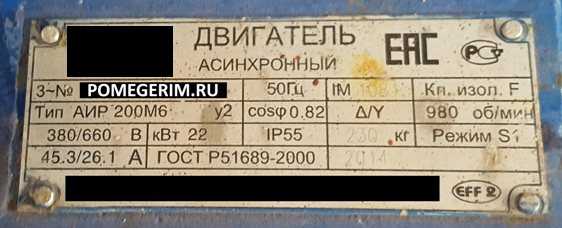
Осмотрев любой, за редким исключением, электродвигатель можно обнаружить табличку, привинченную на болты, саморезы или же заклепки. Что же написано на данном куске металла? Возьмем шильдик, заменив на нем заводской номер на название сайта.
Кстати, редко бывает, что табличка на электрооборудование находится в таком, почти идеальном состоянии. Часто данные выцветают или замазаны краской, ведь задача стоит для обслуживающего персонала покрасить двигатель, а не покрасить двигатель, оставив табличку нетронутой. Но, нам повезло. Пойдем по-порядку.
Первая строчка
— число фаз и тип тока (3
), заводской номер, частота сети, форма исполнения и монтажа, класс изоляции
Вторая строчка
— тип электродвигателя, косинус фи, возможные схемы соединения, номинальная частота вращения
Третья строчка
— возможные номинальные напряжения, номинальная мощность, IP — степень защиты электродвигателя, масса, режим работы электродвигателя (S1).
Четвертая строчка
— номинальные токи в зависимости от схемы включения обмоток, далее какому госту соответствует эд.
Рассмотрим отдельные параметры более подробно.
Мощность электродвигателя: полная, активная и на валу
Формула для расчета мощности трехфазного асинхронного двигателя:
S1 — полная мощность, потребляемая двигателем из сети
P1 — активная мощность, потребляемая электродвигателем из сети (указана на шильдике)
P — активная мощность на валу ЭД.
cosf — косинус фи, коэффициент мощности — угол сдвига фаз между активной (P) и полной мощностью (S).
В формулах выше, значение мощности получится в Вт, значение полной мощности в ВА. Чтобы перевести в киловатты необходимо получившееся значение разделить на тысячу. Значение тока и напряжения соответственно в формуле выше в амперах и вольтах.
I1 и U1 — линейные значения тока и напряжения, их еще называют междуфазными. Не стоит путать с фазными. Линейные — это АВ, ВС, СА (380); фазные — АО, ВО, СО (220). Если выразить формулы мощностей через фазные значения тока и напряжения, то вместо корня из трех вначале будет коэффициент 3. Этот коэффициент определяется наглядно через векторную диаграмму трехфазного напряжения.
Для двигателей постоянного тока формула будет просто произведение напряжения на зажимах двигателя умножить на ток, потребляемые двигателем из сети.
Потребляемая мощность p1 больше мощности на валу ЭД из-за потерь, которые возникают при преобразовании электрической энергии в механическую.
Звезда/Треугольник и 220/380, 380/660
Смотреть все значения по порядку как они идут через дробь. То есть написано на шильде Y/D ( треугольник/звезда), значит и токи, напряжения соответственно будут сначала для Y, а после дроби для звезды. Единственно, нюанс, что при 220/380 — треугольник будет 220, А при 380/660 — треугольник будет 380. То есть говорить, что 380 — это всегда звезда — неверно.
Всегда изучайте табличку на движке перед подключением.
Достоинства при подключении звездой и треугольником абстрактны, так как каждая схема имеет свои области применения:
Наиболее распространенным типом промышленных силовых установок являются асинхронные электродвигатели. Один из наиболее важных их параметров — мощность электродвигателя, которая в зависимости от модели может варьироваться в широких пределах. От мощности зависит тип энергосистемы, к которой двигатель можно подключить, а также тип и производительность оборудования, с которым он будет сопряжен. По этой причине, не зная мощность электродвигателя, использовать его практически невозможно.
Определение мощности электромотора по размерам сердечка статора
Если технического паспорта нет, можно произвести расчет мощности электродвигателя, исходя из размеров сердечника статора и частоты вращения. Для этого используется формула P2H = C * D1 2 / N1 * 10 -6 кВт. Здесь: С —постоянная мощность; D — размер внутреннего диаметра сердечника статора в см; l — длина статора в см; N1 — значение синхронной частоты вращения в об/мин.
Постоянная мощность зависит от частоты вращения и габаритов мотора. Она определяется по величине полюсного деления как зависимость мощности от количества полюсов и размеров полюсного деления τ, если U1 Рисунок 1. Шильдик с параметрами на корпусе электродвигателя Работая с электромоторами, нужно знать, как по шильдику определяется потребляемая мощность электродвигателя. Значение мощности Р — это не электрическая мощность мотора, а механическая мощность на валу, обозначенная в кВт.
Косинус угла в электротехнике
Итак, что такое косинус в электротехнике? Дело в том, что есть такое явление, как сдвиг фаз между током и напряжением
Он происходит по разным причинам, и иногда важно знать о его величине. Сдвиг фаз можно измерить в градусах, от 0 до 360
На практике степень реактивности (без указания индуктивного либо емкостного характера) выражают не в градусах, а в функции косинуса, и называют коэффициентом мощности:
- P – активная мощность, которая тратится на совершение полезной работы,
- S – полная мощность.
Полная мощность является геометрической суммой активной Р и реактивной Q мощностей, поэтому формулу коэффициента мощности можно записать в следующем виде:
В иностранной литературе cos φ называют PF (Power Factor). Фактически, это коэффициент, который говорит о сдвиге сигнала тока по отношению к сигналу напряжения.
Легендарный Алекс Жук очень толково рассказал, что такое реактивная мощность, и всё по этой теме:
В видео подробно и доступно изложена вся теория по теме.