Синхронный двигатель (СД)
Синхронный двигатель — агрегат с индивидуальной конструкцией ротора и индуктором с постоянными магнитами. Отличается улучшенными характеристиками мощности, момента и инерции. Имеет ряд особенностей конструкции и принципе действия.
Устройство
Конструктивно состоит из двух элементов: ротора (вращается) и статора (фиксированный механизм). Роторный узел находится во внутренней части статора, но бывают конструкции, когда ротор расположен поверх статора.
В состав ротора входят постоянные магниты, отличающиеся повышенной коэрцитивной силой.
Конструктивно СД делятся на два типа по полюсам:
- Неявно выраженные. Отличаются одинаковой индуктивностью по поперечной и продольной оси.
- Явно выраженные. Поперечная и продольная индуктивность имеют разные параметры.
Конструктивно роторы бывают разными устройством и по конструкции.
В частности, магниты бывают:
- Наружной установки.
- Встроенные.
Статор условно состоит из двух компонентов:
- Кожух.
- Сердечник с проводами.
Обмотка статорного механизма бывает двух видов:
- Распределенная. Ее отличие состоит в количестве пазов на полюс и фазу. Оно составляет от двух и более.
- Сосредоточенная. В ней количество пазов на полюс и фазу всего одно, а сами пазы распределяются равномерно по поверхности статорной части. Пара катушек, формирующих обмотку, могут соединяться в параллель или последовательно. Минус подобных обмоток состоит в невозможности влияния на линию ЭДС.
Форма электродвижущей силы электрического синхронного мотора бывает в виде:
- Трапеции. Характерна для устройств с явно выраженным полюсом.
- Синусоиды. Формируется за счет скоса наконечников на полюсах.
Если говорить в целом, синхронный мотор состоит из следующих элементов:
- узел с подшипниками;
- сердечник;
- втулка;
- магниты;
- якорь с обмоткой;
- втулка;
- «тарелка» из стали.
Принцип работы
Сначала к обмоткам возбуждения подводится постоянный ток. Он создает магнитное поле в роторной части. Статор устройства содержит обмотку для создания магнитного поля.
Как только на статорную обмотку подается ток переменной величины, по закону Ампера создается крутящий момент, и ротор начинает вращаться с частотой, равной частоте тока в статорном узле. При этом оба параметра идентичны, поэтому и двигатель носит название синхронный.
Роторная ЭДС формируется, благодаря независимому источнику питания, что позволяет менять обороты и не привязываться к мощности подключенных потребителей.
С учетом особенностей работы синхронный электродвигатель не может запуститься самостоятельно при подключении к трехфазному источнику тока.
https://youtube.com/watch?v=LLwcpfUjl44
Сфера применения
Электродвигатель синхронного типа имеет широкую сферу применения, благодаря постоянству частоты вращения.
Эта особенность расширяет сферу его применения:
- энергетика: источники реактивной мощности для поддержания напряжения, сохранение устойчивости сети при аварийных просадках;
- машиностроение, к примеру, при изготовлении гильотинных ножниц с большими ударными нагрузками;
- прочие направления — вращение мощных компрессоров или вентиляторов, генераторы на электростанциях, обеспечение устойчивой работы насосного оборудования и т. д.
Как подключить электродвигатель 380В на 220В
Преимущества и недостатки
После рассмотрения конструктивных особенностей, принципа работы и сферы применения СД подведем итог по положительным / отрицательным особенностям.
Плюсы:
- Возможность работы при косинусе Фи равном единице (отношение полезной мощности к полной). Эта особенность улучшает косинус Фи сети. При работе с опережающим током синхронные машины генерируют реактивную мощность, которая поступает к асинхронным моторам и уменьшает потребление «реактива» от генераторов электрических станций.
- Высокий КПД, достигающий 97-98%.
- Повышенная надежность, объясняемая большим воздушным зазором.
- Доступность регулирования перегрузочных характеристик, благодаря изменению тока, подаваемого в ротор.
- Низкая чувствительность к изменению напряжения в сети.
Минусы:
- Более сложная конструкция и, соответственно, высокая стоимость изготовления.
- Трудности с пуском, ведь для этого нужные специальные устройства: возбудитель, выпрямитель.
- Потребность в источнике постоянного тока.
- Применение только для механизмов, которым не нужно менять частоту вращения.
Пример СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В.
СД2-85/37-6У3, 500кВт, 1000об/мин, 6000В
Статор асинхронного двигателя
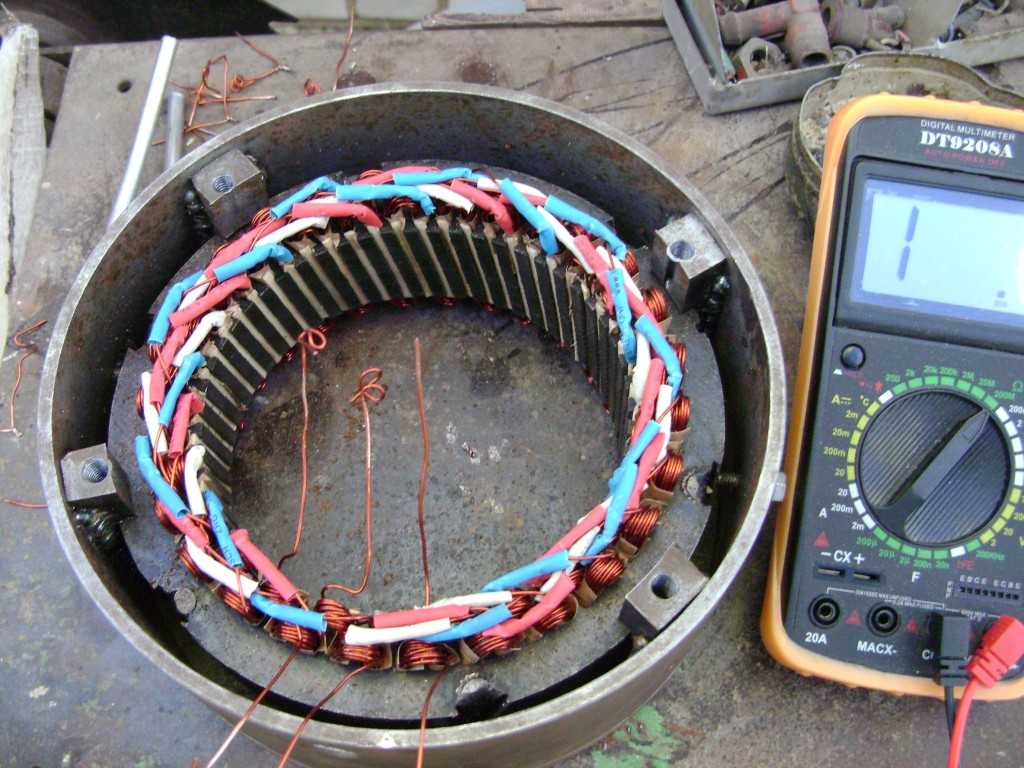
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.
Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы
в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
Асинхронный двигатель имеет три «куска» медного провода
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.
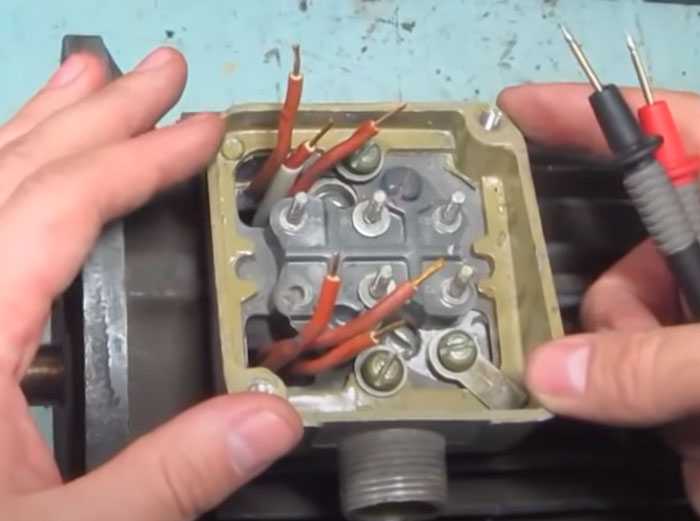
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.





Реальное фото статора одного из асинхронного двигателя выглядит вот так.
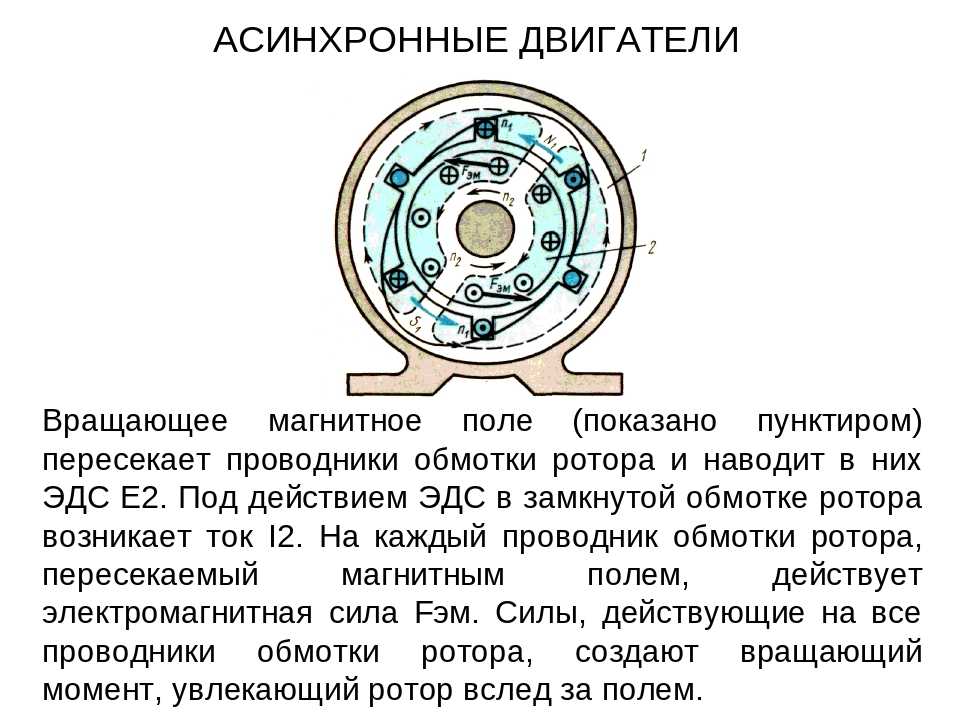
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
https://youtube.com/watch?v=9Ym38FxfqIQ
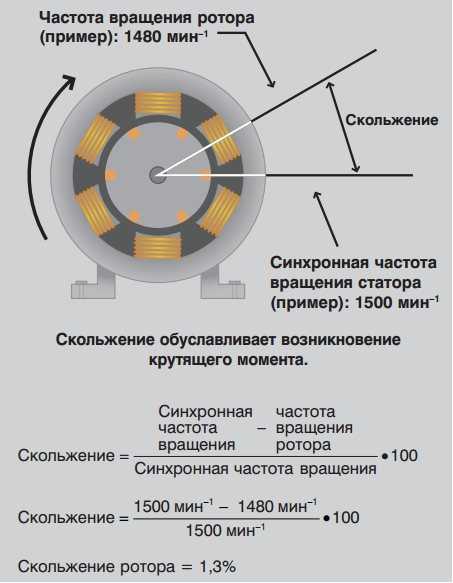
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
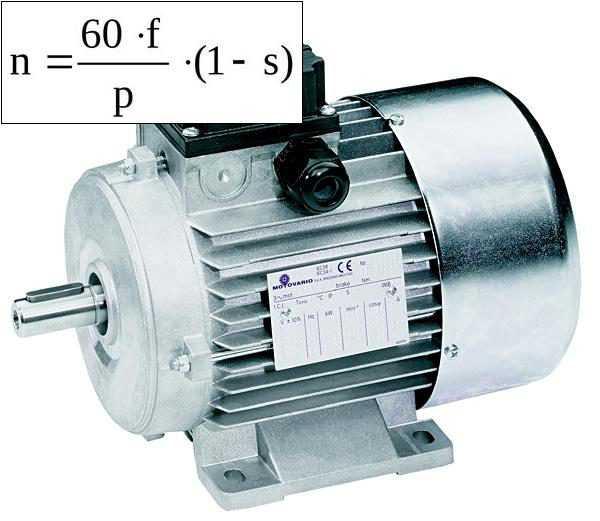
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
N=60f/p
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.
Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).
Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.
Подписка на рассылку
На сегодняшний день использование синхронных двигателей получило широкое распространение в сфере производства оборудования, работающего с постоянной скоростью, которое применяется в разных сферах человеческой деятельности. В связи с этим, существует несколько способов запуска синхронных электродвигателей, наиболее распространенные варианты которых будут представлены ниже.








Способы пуска синхронного электродвигателя
Способы пуска синхронного электродвигателя достаточно сложны, в этом заключается один из основных недостатков электродвигателей данного типа. Запуск синхронных электродвигателей осуществляется либо посредством воздействия вспомогательного пускового двигателя, либо с помощью асинхронного пуска. Рассмотрим каждый из способов в отдельности.
Асинхронный пуск синхронного электродвигателя
Асинхронный пуск синхронного электродвигателя предполагает расположение дополнительной короткозамкнутой обмотки в полюсных наконечниках полюсов ротора. Это необходимо, чтобы обеспечить во время пуска вывод чрезмерно большой Э.Д.С., образующейся в обмотке (1), что является возможным благодаря замыканию рубильника (2) на соединение (3). Благодаря тому, что магнитное поле, возникающее в результате включения напряжения трехфазной сети в обмотке статора (4), пересекает короткозамкнутую обмотку (пусковую обмотку), находящуюся в полюсных наконечниках ротора, индуктируются токи.
Действие этих токов в сочетании с вращающимся полем статора, запускают во вращение ротор, который постепенно набирает обороты. Достигнув 95-97% количества оборотов рубильник (2) ротора переходит в состояние, которое вынуждает обмотку ротора включить сеть постоянного напряжения.
Однофазный асинхронный двигатель
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Особенности конструкции
Двигатели постоянного тока представлены вращающимися нагнетательными элементами, которые размещаются на поверхности статически закрепленной станины. Устройства подобного типа получили широкое применение и эксплуатируются при необходимости обеспечивать разнообразие скоростного регулирования в условиях стабильности вращательных движений привода.
С конструктивной точки зрения все виды ДПТ представлены:
- роторной или якорной частью в виде большого количества катушечных элементов, покрытых специальной токопроводящей обмоткой;
- статичным индуктором в виде стандартной станины, дополненной несколькими магнитными полюсами;
- функциональным щеточным коллектором цилиндрической формы, располагающимся на валу и имеющим медную пластинчатую изоляцию;
- статично зафиксированными контактными щетками, используемыми с целью подведения достаточного количества электротока на роторную часть.
Как правило, электрические двигатели ПТ оснащаются специальными щетками графитового и медно-графитного типа. Вращательные движения вала провоцируют замыкание и размыкание контактной группы, а также способствуют искрению.
Определенное количество механической энергии поступает от роторной части к другим элементам, что обусловлено наличием передачи ременного типа.
Как определить мощность и обороты электродвигателя без бирки?
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
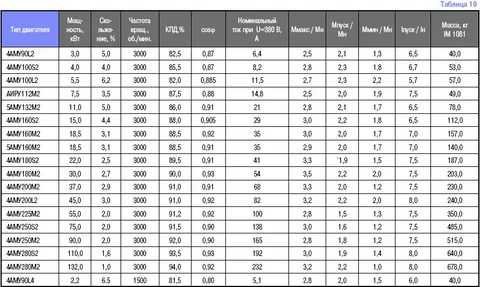
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
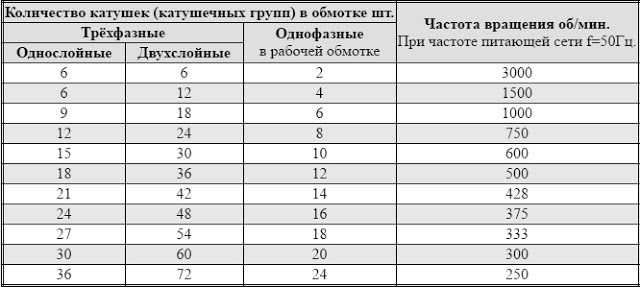
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
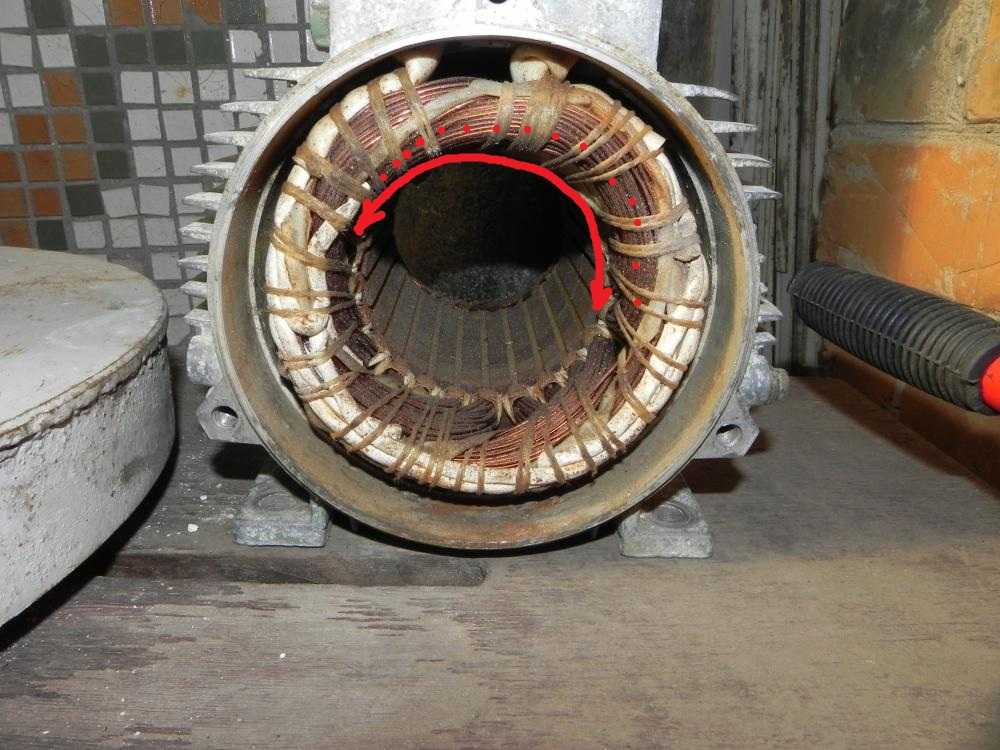
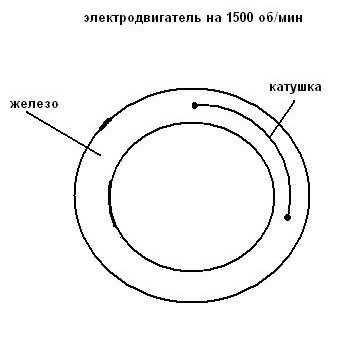
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.






Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.
Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.
Синхронное взаимодействие
Синхронное взаимодействие — самое простое. Оно скрывает все детали удаленного вызова, что для вызывающего сервиса превращается в обычный вызов функции с получением ответа. Для его организации есть множество протоколов — например, давно известные RPC и SOAP. Но очевидная проблема синхронности в том, что удаленный сервис может отвечать не очень быстро даже при простой операции — на время ответа влияет загруженность сетевой инфраструктуры, а также другие факторы. И все это время вызывающий сервис находится в режиме ожидания, блокируя память и другие ресурсы (хотя и не потребляя процессор). В свою очередь, блокированные ресурсы могут останавливать работу других экземпляров сервиса по обработке сообщений, замедляя тем самым уже весь поток обработки. А если в момент обращения к внешнему сервису у нас есть незавершенная транзакция в базе данных, которая держит блокировки в БД, мы можем получить каскадное распространение блокировок.
Например, при распиле монолита мы выносим сервис хранения товаров отдельно. И в бизнес-логике обработки заказа (где-то в середине) нам надо получить какой-то атрибут для действий в зависимости от него — например, узнать вес и объем товара, чтобы решить: курьер довезет или нужна машина (или даже газель). Если раньше мы обращались за атрибутом локально и быстро получали ответ, то теперь мы используем удаленное обращение — и пока он идет, этот процесс держит не только свои ресурсы, но и блокировки, связанные с незавершенной транзакцией.
При этом стандартный шаблон работы с базой данных — все изменения по одному запросу пользователя проводить в одной транзакции (разумно их делить), а не завершать транзакции после каждого оператора для обеспечения консистентности данных. Поэтому при выносе хранения товаров в отдельный сервис нам не просто надо переписать процедуры запроса атрибутов на обращения к сервису, а провести реинжиниринг кода: сначала запросить все необходимые данные от других сервисов, а потом начать делать изменения в базе данных.
Казалось бы, это всё очевидно. Но я встречался со случаями, когда синхронные вызовы ставили без необходимости, искренне не понимая, что выполнение будет долгим, а накладные расходы — большими. Отдельная засада заключается в том, что современные системы разработки позволяют вынести сервисы на удаленный сервер не меняя исходного кода, — и сделать это могут администраторы при конфигурировании системы. В том числе на уровне базы данных — я встречался с идеями, когда централизованное хранение логов на полном серьезе предлагали делать просто за счет переноса локальных таблиц на общий сервис так, чтобы прямые вставки в них превратились в ставки по dblink. Да, это — простое решение. Только очень неустойчивое по производительности и чувствительное к сбоям сетевой инфраструктуры.
И третья проблема связана с масштабированием. При синхронном взаимодействии один экземпляр вызывающего сервиса вызывает один экземпляр вызываемого, но который, в свою очередь, тоже может вызывать другие сервисы. И нам приходится существенно ограничивать возможность простого масштабирования через увеличение экземпляров запущенных сервисов, при этом мы должны проводить это масштабирование сразу по всей инфраструктуре, поддерживая примерно одинаковое число запущенных сервисов с соответствующей затратой ресурсов, даже если проблема производительности у нас только в одном месте.
Поэтому синхронное взаимодействие между сервисами и системами — зло. Оно ест ресурсы, мешает масштабированию, порождает блокировки и взаимное влияние разных серверов.
Я бы рекомендовал избегать его совсем, но, оказывается, есть одно место, в котором протокол поддерживает только синхронное взаимодействие. А именно — взаимодействие между сервером приложений и базой данных по JDBC синхронно принципиально. И только некоторые NoSQL базы данных поддерживают реально асинхронное взаимодействие со стороны сервера приложений и вызовы callback по результату обработки. Хотя казалось бы, мы находимся в поле бэкенд-разработки, которая в наше время должна быть ориентирована на асинхронное взаимодействие… Но нет — и это печально.
5.15. ДВУХФАЗНЫЙ КОНДЕНСАТОРНЫЙ ДВИГАТЕЛЬ
Двухфазный конденсаторный
двигатель имеет на статоре две обмотки ОВ и ОУ, рассчитанные на длительное протекание
тока. Обмотки располагаются в пространстве под углом 90 эл. градусов), а последовательно
одной из них включают конденсатор С.
Двухфазный конденсаторный
двигатель переменного тока обладает вращающимся магнитным полем (правда, не
круговым, а эллиптическим). Поэтому он не нуждается в специальных пусковых устройствах
(рис. 5.15 1.).
Двухфазный асинхронный
двигатель, в отличие от трехфазного, имеет возможность плавного регулирования
частоты вращения ротора.
Делается это одним из двух
способов: амплитудным (изменением напряжения Uy) и фазным (изменением емкости
конденсатора С).
Двухфазные двигатели получили
широкое распространение в бытовых приборах и лабораторной практике.
В отличие от рассмотренных
выше типов двигателей, интересен двигатель с полым ротором. Он имеет два статора,
между которыми располагается ротор (рис. 5.15.2.).






Наружный статор 1 имеет
обычно конструкцию с двухфазной обмоткой 4. Фазные обмотки сдвинуты в пространстве
относительно друг друга на 90°. Внутренний статор 3 представляет
собой пакет электротехнической стали без обмотки. В воздушном зазоре между
статорами помещен ротор двигателя 2, который не имеет обмотки и выполнен в виде
стакана с тонкими стенками из немагнитного материала (алюминия). Посредством
втулки 6 ротор укреплен на валу двигателя 5. Такая конструкция обеспечивает
ему незначительную инерцию и делает двигатель чувствительным даже к небольшим
импульсам (сигналам) тока. Этому также способствует наличие второго статора,
который уменьшает сопротивление магнитной цепи. Одна из фаз обмоток статора
включается на напряжение сети Uс, другая является управляющей обмоткой.
Когда напряжение на ней отсутствует, ротор неподвижен. С появлением управляющего
сигнала Uу достаточной величины статор создает двухфазное вращающееся
поле, и двигатель развивает вращающий момент, величина которого пропорциональна
Uc.
Работа этого двигателя
основана на взаимодействии магнитного поля статора с вихревыми токами, наведенными
на поверхность полого ротора.
Машины с полым ротором
весьма чувствительны к изменениям напряжения сигнала и его продолжительности,
что дает возможность применять их в качестве исполнительных двигателей.
Сравнение
Главное отличие синхронного двигателя от асинхронного заключается в соотношении величины частот вращения ротора и магнитного поля. В агрегате первого типа оба показателя одинаковые. В асинхронной машине — разные.
Можно отметить, что электродвигатели второго типа в целом более распространены, чем первые. При этом асинхронные агрегаты чаще всего представлены в разновидности, в которой инсталлирован короткозамкнутый ротор. Данные устройства имеют ряд важнейших преимуществ перед электродвигателями иных категорий. А именно:
- простота конструкции, надежность;
- относительно невысокая себестоимость производства, эксплуатации;
- способность функционирования при задействовании имеющихся ресурсов сети без подключения преобразователей.
Вместе с тем асинхронные машины с короткозамкнутым ротором обладают и рядом недостатков. А именно:
- наличие малого пускового момента;
- наличие большого пускового тока;
- пониженный коэффициент мощности;
- низкая управляемость с точки зрения регулирования скорости;
- зависимость максимальной скорости от частоты электрической сети;
- электромагнитный момент в асинхронных двигателях рассматриваемого типа характеризуется сильной чувствительностью к снижению напряжения в сети.
В свою очередь, у синхронных агрегатов также есть неоспоримые достоинства. К таковым можно отнести:
- относительно невысокую чувствительность к перепадам напряжения в сети;
- стабильность вращения вне зависимости от нагрузки на ротор.
Есть у синхронных двигателей и недостатки:
- относительная сложность конструкции;
- сложность запуска ротора в ход.
Отмеченные особенности работы синхронных и асинхронных агрегатов делают оптимальным использование первых в случае, если требуемая мощность двигателя в системе (например, как части инфраструктуры фабричной линии) должна составлять порядка 100 кВт и более. В остальных случаях задействование асинхронных машин, как правило, становится более предпочтительным.
Рассмотрев, в чем разница между синхронным и асинхронным двигателем, отразим выводы в таблице.