
Большая Энциклопедия Нефти и Газа
Увеличение пускового момента связано с влиянием в области больших скольжений момента вихревых токов.
Для увеличения пускового момента в таких случаях параллельно рабочему конденсатору включают еще один пусковой конденсатор, условно изображенный на рис. 18.10 пунктиром. Это приводит к снижению напряжения на рабочем конденсаторе и к соответствующему повышению напряжения на зажимах рабочей фазы, соединенной последовательно с конденсатором; средняя величина потока полюса эллиптического вращающегося поля возрастает и пусковой момент двигателя увеличивается.
Для увеличения пусковых моментов применяют двигатели с двойной роторной обмоткой, допускающие, как правило, пуск в режиме противотока. Выбор мощности электродвигателей собственных нужд производят по условиям длительного режима работы, проверяя, чтобы их пусковой момент был больше момента сопротивления механизма. При выборе мощности двигателя учитывается продолжительность его пуска, которая е должна превышать допустимую.
Для увеличения пусковых моментов двигателей прямоугольные пазы делают узкими и глубокими, так как эффект вытеснения тока в них возрастает с увеличением высоты стержня. Роторы с такими пазами называют глубокопазными.
Для увеличения пускового момента двигателя и уменьшения перенапряжения на обмотке возбуждения она обычно шунтируется разрядным сопротивлением. Для исключения дополнительных потерь энергии разрядное сопротивление после окончания пуска отключается.
Для увеличения пускового момента рассматриваемого двигателя путем приближения его вращающегося поля к круговому применяют различные способы: устанавливают между полюсными наконечниками смежных полюсов магнитные шунты, которые усиливают магнитную связь между основной обмоткой и короткозамкнутым витком и улучшают форму магнитного поля в воздушном зазоре; увеличивают воздушный зазор под наконечником, не охватываемым короткозамкнутым витком; используют два и большее количество короткозамкнутых витков на одном наконечнике с разными углами охвата. Имеются также двигатели без короткозамкнутых витков на полюсах, но с несимметричной магнитной системой: различной конфигурацией отдельных частей полюса и разными по величине воздушными зазорами.
Для увеличения пускового момента рассматриваемого двигателя путем приближения его вращающегося поля к круговому применяют различные способы: устанавливают между полюсными наконечниками смежных полюсов магнитные шунты, усиливающие магнитную связь между основной обмоткой и короткозамкнутым витком и улучшающие форму магнитного поля в воздушном зазоре; увеличивают воздушный зазор под наконечником, не охватываемым короткозамкнутым витком; используют два и большее количество короткозамкнутых витков на одном наконечнике с разными углами охвата. Имеются также двигатели без короткозамкнутых витков на пслюсах, но с несимметричной магнитной системой: различной конфигурацией отдельных частей полюса и разными по величине воздушными зазорами. Такие двигатели имеют меньший пусковой момент, чем двигатели с экранированными полюсами, но КПД их выше, так как у них потери мощности в короткозамкнутых витках отсутствуют.
С увеличением пускового момента двигателя соответственно уменьшается его входной момент, и наоборот. Это требует обязательного согласования пусковых характеристик двигателя с рабочими характеристиками механизма.
Кратность — пусковой момент
Кратность пускового момента выбирается из каталога на двигатели. За расчетное значение Ммакс принимается максимальная величина момента только в тех положениях переключающего устройства, в которых оно может остановиться.
Кратностью пускового момента называют отношение Кп — м Мп / Мном. Для асинхронных двигателей мощностью 0 6 — 100 кВт ГОСТом установлен Кп. Достоинством прямого пуска является простота, а отсюда — высокая надежность.
Получение кратностей пускового момента , больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора ( см. 4.58), либо с изменением конструкции ротора ( см. § 4.11), что ухудшает энергетические показатели двигателя.
Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности. Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала. Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
5.18.6 Поворотные трансформаторы
Так называют электрические машины переменного тока,
предназначенные для преобразования угла поворота q в напряжение,
пропорциональное некоторым функциям угла поворота ротора sinq
или cosq, а также самому углу q. Их применяют в вычислительной
технике для выполнения различных математических операций. С помощью поворотных
трансформаторов решают геометрические задачи, связанные с построением треугольников,
преобразованием координат, разложением и построением векторов. В системах автоматического
регулирования поворотные трансформаторы используют в качестве измерителей расстояния,
фиксирующих отклонение системы от некоторого определенного положения.
Конструктивно поворотный трансформатор представляет
собой асинхронную машину малой мощности. На статоре ее перпендикулярно размещены
две обмотки: C1-C2 и С3-С4.
Первая получила название главной, а вторая — квадратурной. Обмотки статора выполняются
одинаковыми, т.е. с одинаковым числом витков. На роторе может быть одна обмотка,
но чаще их бывает две. На рис. 5.18.6.1. приведены схемы включения синусного,
косинусного и синусно-косинусного поворотных трансформаторов.
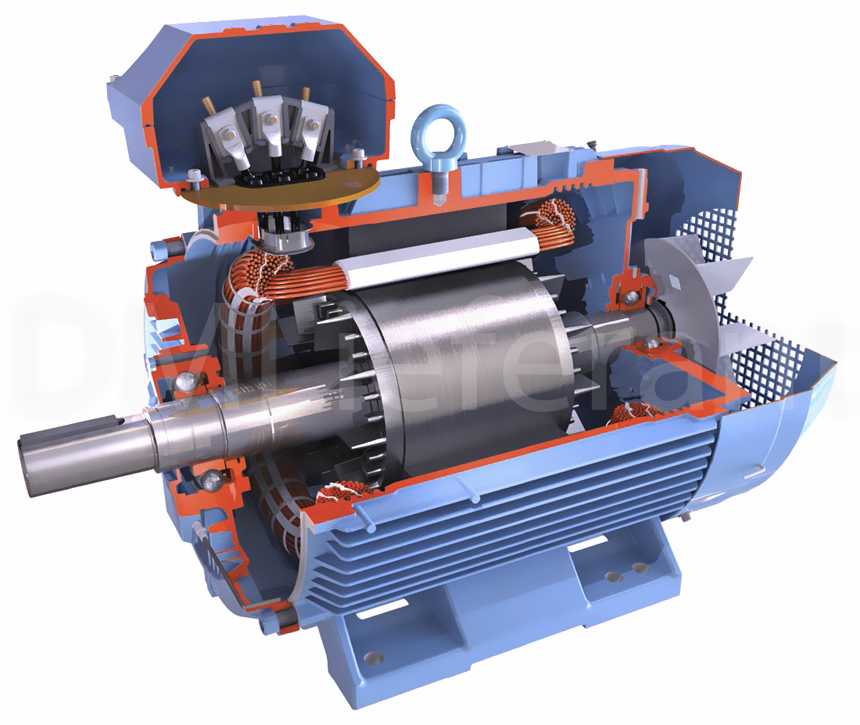
Важные технические характеристики
Современные асинхронные двигатели с фазным ротором должны отвечать определенным параметрам, гарантирующим их качественную и безотказную работу в тех или иных условиях. Правильно подобранная механическая характеристика асинхронного двигателя с оптимальными электрическими показателями – залог успешной и эффективной работы всей электроустановки.







Среди основных технических характеристик электромотора можно выделить:
- соответствующая техническому регламенту мощность;
- габаритные размеры и конструкция;
- степень защиты от воздействия окружающей среды во время эксплуатации в определенных условиях (например, одни модели специально предназначены для работы в помещениях, а другие могут работать на открытом воздухе или одни агрегаты выдерживают сильный холод, а другие – экстремальную жару);
- толщина и качество изоляционного покрытия (устройство асинхронного двигателя с фазным подключением ротора должно предусматривать устойчивость к повышенным внутренним температурам и сильное нагревание обмоток, для чего здесь используется специальный слой защитной изоляции);
- рабочие режимы в соответствии с установленными нормами;
- система охлаждения, обеспечивающая нормальное функционирование силового агрегата в заданном рабочем режиме;
- уровень создаваемого шума при работе на холостом ходу (желательно не выше второго класса).
Это наиболее важные параметры, на которые необходимо обращать внимание при выборе и эксплуатации электрического двигателя. Но существует и другие характеристики, к примеру, определяющие специфические режимы работы и техническое обслуживание асинхронного электромотора
Как правило, все они подробно описываются в руководстве и технической документации к силовому агрегату или электроприводу.
Методы увеличения Мпуск
Из формулы видно, от чего зависит пусковой момент асинхронного двигателя и как увеличить его, изменяя параметры. Он зависит от мощности трехфазного двигателя и величины скольжения.
Мощность определяется по формуле, корень из 3 умноженный на напряжение и ток. Скольжение изменяет свое значение в зависимости от оборотов вала механизма. При оборотах двигателя равных нулю, скольжение принимает значение равное 1.
При разгоне электродвигателя оно уменьшается и стремится к нулю при достижении номинальных оборотов ротора. Для того чтобы увеличить пусковой момент, достаточно увеличить пусковой ток или питающее напряжение. Величину скольжения изменить нельзя.
Для примера приведем расчет пускового момента, используя паспортные данные некоторых двигателей. Результат сведен в нижеприведенную таблицу:

При этом следует помнить, что использование электродвигателя в механизмах с пусковым моментом, превышающим усилие двигателя на валу – недопустимо. В этом случае электродвигатель не сможет преодолеть потери в двигателе и тормозной момент механизма. Он просто выйдет из строя. Т.е. усилие электродвигателя недостаточно для нормальной работы устройства.
5.16. ОДНОФАЗНЫЙ ДВИГАТЕЛЬ С ЯВНО ВЫРАЖЕННЫМИ ПОЛЮСАМИ
Для создания вращающего момента в однофазных асинхронных
двигателях иногда применяют конструкцию с явно выраженными полюсами и однофазной
обмоткой. Полюса 1 (рис. 5.16.1) имеют расщепленную конструкцию, причем на одну
из половинок каждого полюса надет короткозамкнутый виток в виде медного кольца
2. Ротор также короткозамкнутый. При подключении обмотки статора к сети под
действием создаваемого ею пульсирующего магнитного потока в витке возникает
ток, который препятствует нарастанию потока в этой части полюса.
В результате потоки в обеих
частях каждого полюса оказываются сдвинуты по фазе относительно друг друга,
что в свою очередь приводит к образованию в двигателе вращающего магнитного
поля. Однофазные двигатели применяют в некоторых типах вентиляторов, электропроигрывателях
и т.д.
Что такое пусковой ток двигателя
Если взять любой технический паспорт к двигателю, то там кроме рабочего тока, мощности, оборотов, типа соединения полюсов и напряжения можно найти такой параметр как пусковой ток. В этой статье я хочу подробно остановиться именно на этом параметре и рассказать, что это такое и каким образом можно измерить пусковой ток у реального двигателя. Итак, начнем.
Пусковой ток и его кратность
Итак, для начала давайте дадим определение. Пусковой ток — это ток, потребляемый электродвигателем в момент его запуска (раскручивания). В большинстве случаев этот ток больше рабочего в 6-8 раз. Величина, показывающая во сколько раз больше пусковой ток, называется кратностью и записывается как коэффициент:
Получается, если известен коэффициент, то пусковой ток найти крайне легко по этой формуле:
Кратность пусковых токов имеет прямую зависимость от мощности самого движка и от того сколько пар полюсов в нем реализовано. То есть при меньшей мощности будет меньший пусковой ток. А в случае с парами полюсов, чем их меньше, тем пусковой ток больше.
Получается, что, наибольшим пусковым током обладают двигатели с оборотами 3000 об/мин, двумя полюсами и мощностью более 10 кВт (7-9 крат от номинала).
Почему так происходит
Все дело в том, что потребление тока и инерционный момент при запуске зависит от конструктивных особенностей двигателя и от того, каким образом произведена намотка обмоток.
Мало полюсов – это минимальное сопротивление обмоток. Такое низкое сопротивление – это автоматически большой ток. А еще высокооборотистым движкам для полного выхода на рабочие параметры необходимо больше времени, а это автоматически тяжелый пуск.




Потребляемая мощность электродвигателя
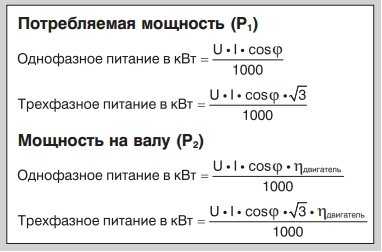
Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД.
В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.).
Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт.
И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с.
Что такое максимальный момент асинхронного двигателя
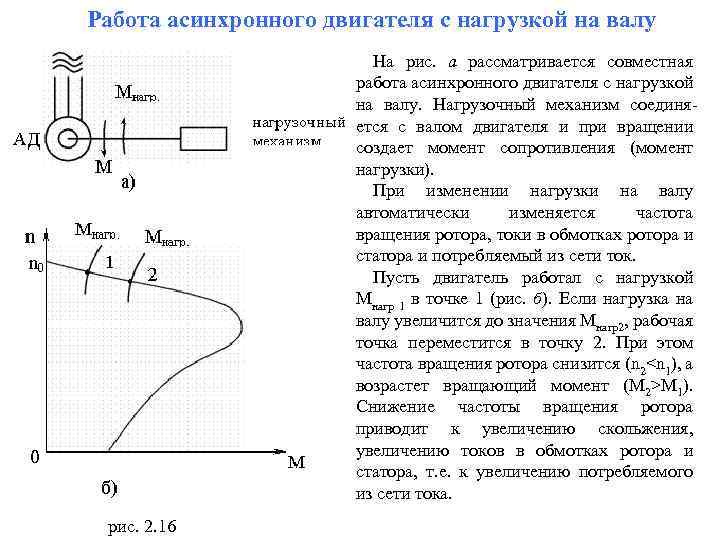
В рамках современной теории асинхронных электрических машин применяют ряд терминов связанных с понятием момента. Часть этих терминов относится к моменту создаваемому на валу (на роторе) электродвигателя. Другая группа терминов определяет моменты создаваемые механической нагрузкой подключенной к валу электрического двигателя.
Эти термины определяют как сам момент развиваемый двигателем, так и различный состояния момента на выходном валу двигателя. Под состоянием подразумевается значение момента в кретических точках. Например номинальный момент или пусковой момент.
Вот перечень терминов, которые нам приходилось встречать в литературе:
Электромагнитный момент под которым понимают момент ротора двигателя возникающий при воздействии электромагнитного поля. Данный термин часто заменяют синонимами: вращающий момент или крутящий момент. На нашем сайте есть более полная статья про электромагнитный момент асинхронного двигателя.
Пусковой момент — это значение момента в момент трогания ротора. Данный момент в литературе часто называют моментом трогания или начальным пусковым моментом электродвигателя. Более полную информацию можно получить в материале про пусковой момент асинхронника.
Номинальный момент — значение момента создаваемое электромагинитным полем на валу двигателя при номинальных параметрах двигателя и номинальных внешинх условиях. Дополнительные сведения про термин номинальный момент можно получить в статье про асинхронные двигатели и их номинальный момент.
Под критическим моментом понимают наивысшее или максимльно возможное значение. В случае если момент нагрузки превысит величину критического момента, то двигатель остановится. Поэтому в литературе в качестве синонима встречается так же термин: максимальный вращающий момент электродвигателя переменного тока. Данный термин подробно рассмотрен в статье про критический момент асинхронного двигателя.
Тормозной момент — момент возникающий под действием электромагнитных сил на роторо асинхронного двигателя и противоположный по знаку вращающему моменту. Часто встречается в литературе термин синоним: тормозящий момент. Подробное обсуждение понятия тормозной момент асинхронного двигателя здесь.
Момент нагрузки, называемый еще и момент сопротивления — параметр относящийся к механической системе подключенной к валу асинхронного двигателя. Здесь более полный анализ термина момент сопротивления.
Другие статьи про момент электродвигателя на нашем сайте:
Источник
Вращающий момент, развиваемый на валу асинхронного электродвигателя в условиях нулевой скорости вращения ротора (когда ротор еще неподвижен) и установившегося в обмотках статора тока, — называется пусковым моментом асинхронного двигателя.
Пусковой момент иногда называют еще моментом трогания или начальным моментом. При этом подразумевается, что напряжение и частота питающего напряжения приближены к номиналу, причем соединение обмоток выполнено правильно. В номинальном режиме работы данный двигатель будет работать именно так, как предполагали разработчики.








Численное значение пускового момента
Пусковой момент вычисляется по приведенной формуле. В паспорте электродвигателя (паспорт предоставляется производителем) указана кратность пускового момента.
Обычно значение величины кратности лежит в пределах от 1,5 до 6, в зависимости от типа двигателя
И при выборе электродвигателя для своих нужд, важно убедиться, что пусковой момент окажется больше статического момента планируемой проектной нагрузки на валу. Если это условие не соблюсти, то двигатель попросту не сможет развить рабочий момент при вашей нагрузке, то есть не сможет нормально стартонуть и разогнаться до номинальных оборотов
Давайте рассмотрим еще одну формулу для нахождения пускового момента. Она будет вам полезной для теоретических расчетов. Здесь достаточно знать мощность на валу в киловаттах и номинальные обороты, — все эти данные указаны на табличке (на шильдике). P2-номинальная мощность, F1-номинальные обороты. Итак, вот эта формула:
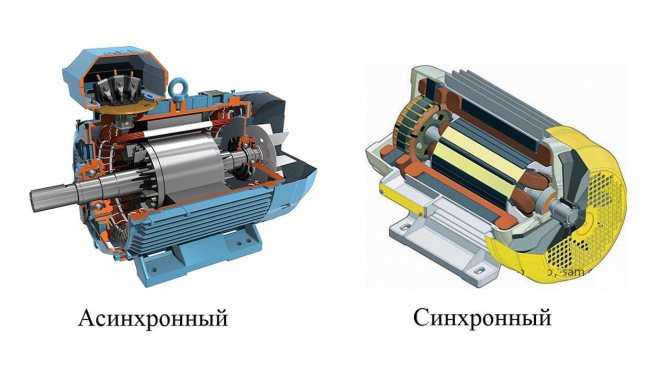
Преимущества и недостатки
К преимуществам асинхронных электродвигателей, в сравнении с другими типами электрических машин следует отнести:
- Относительно меньшая стоимость, в сравнении с другими типами электродвигателей, за счет простоты конструкции;
- Высокая степень надежности, благодаря отсутствию вспомогательных элементов редко выходят со строя;
- Способны выносить кратковременные перегрузки;
- Могут включаться в цепь напрямую без использования дополнительного оборудования;
- Низкие затраты на содержание в ходе эксплуатации.
Основными недостатками асинхронного электродвигателя являются относительно большие пусковые токи и слабый пусковой момент, что в определенной степени ограничивает сферу прямого включения. Также асинхронные электродвигатели обладают низким коэффициентом мощности и сильно зависят от параметров питающего напряжения.
Время действия и величина пускового тока
Длительностью пускового тока будем считать время, в течение которого ток понижается от максимума (Iп) до номинала (Iн). Эта длительность фактически равна времени разгона от нуля до номинальной скорости вращения.
Весь вопрос в том, какова длительность этого тока – 10 миллисекунд (пол периода), когда двигатель на холостом ходу, или 10 секунд, когда на валу массивная крыльчатка. Теоретически рассчитать это время невозможно. Однако, поделюсь некоторыми соображениями.
Как я говорил выше, ток двигателя при пуске может превышать норму в несколько раз (Кп). И некоторые начинающие электрики, которые не читают мой блог, считают, что защитный автомат нужно выбирать так же – на повышенный ток. В статьях и даже инструкциях пишут, что “При выборе автомата необходимо учитывать, что пусковой ток асинхронного электродвигателя в 5 – 7 раз превышает номинальный”. Как это учитывать? Неужели ток автомата выбирать в 5-7 раз выше номинального тока двигателя?
Пример:

Шильдик китайского электродвигателя 30 кВт
Написано – 56 А. Что это значит? Неужели то, что ток защитного автомата должен быть более 300 А? Конечно, нет. И выбор автомата в данном случае зависит не только от номинального тока двигателя (56 А), но и от времени действия пускового тока.
Пусковой ток является максимально возможным током. Максимальным ток будет при пуске, то есть тогда, когда двигатель стоит. То есть, пусковой ток есть ВСЕГДА, и всегда его начальное значение имеет запредельную величину. В случае с нашим китайским движком – 392 А, если принять ток КЗ питающей сети равным бесконечности (источник напряжения с нулевым внутренним сопротивлением).






Пусковые режимы электрических моторов
Существуют и применяются на практике разные пусковые режимы асинхронных электродвигателей. Каждый имеет свои плюсы и минусы в зависимости от технических характеристик моторов и нагрузки.
Выбор конкретного режима пуска определяется электрическими, механическими, экономическими факторами. Вид управляемой нагрузки, также является важным фактором выбора режима запуска. Рассмотрим наиболее часто практикуемые варианты пусков.
Пусковые режимы свободно вращающегося мотора
Этот режим пуска асинхронного электродвигателя видится самым простым из всех существующих схем. Здесь статор мотора напрямую подключается к источнику питания. Электродвигатель стартует в соответствии с определённой для него характеристикой.
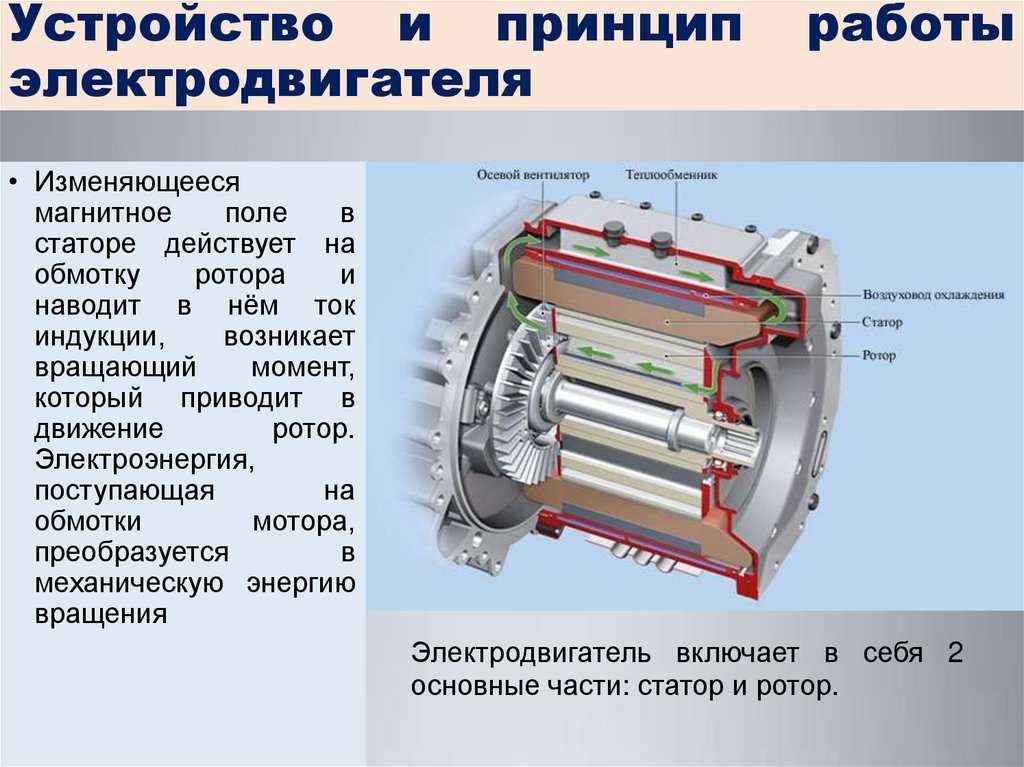
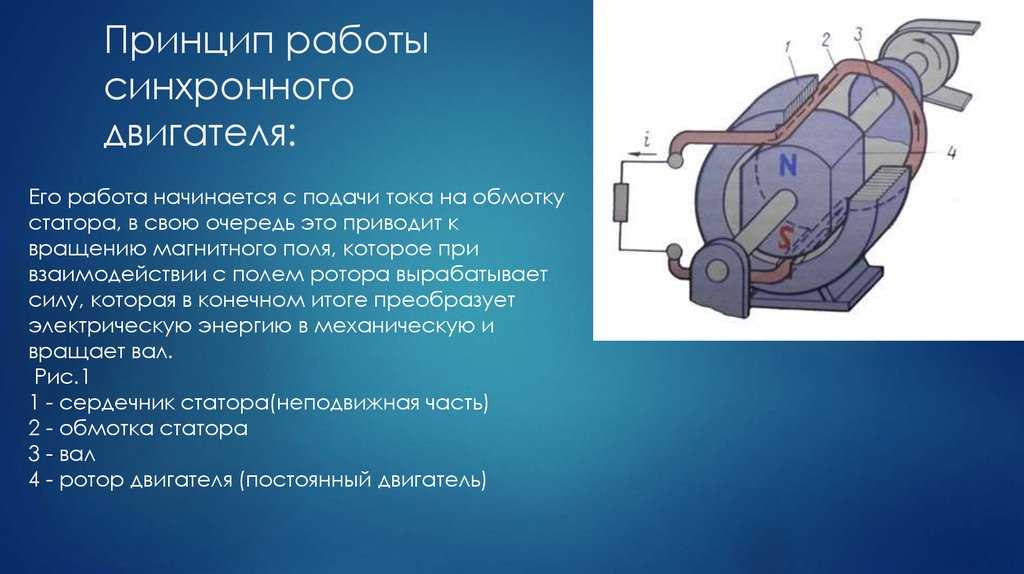
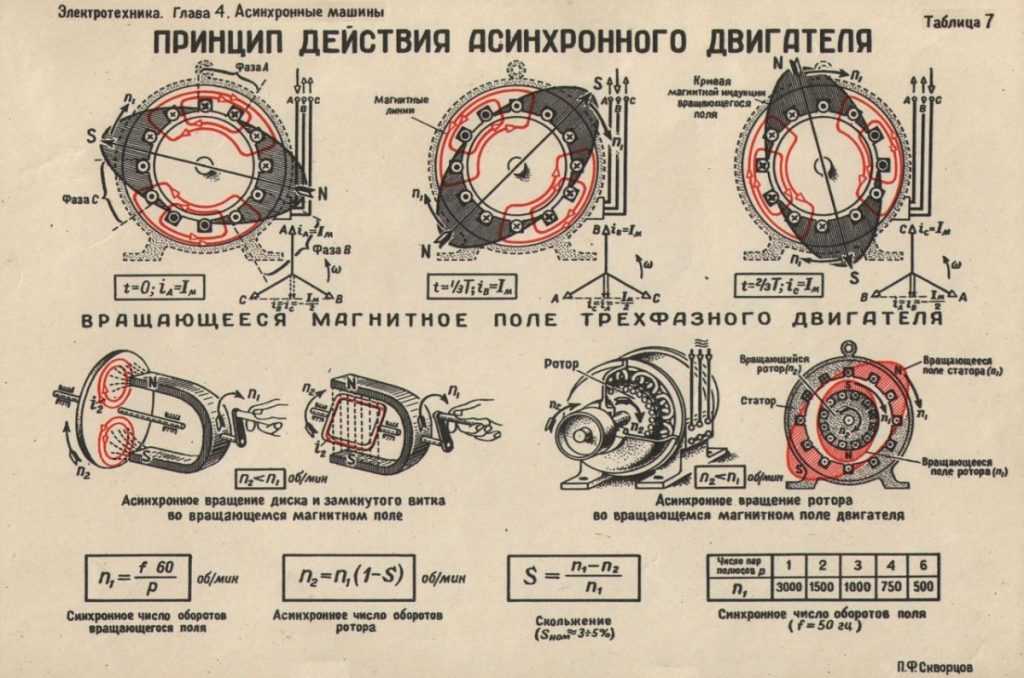
Принцип действия
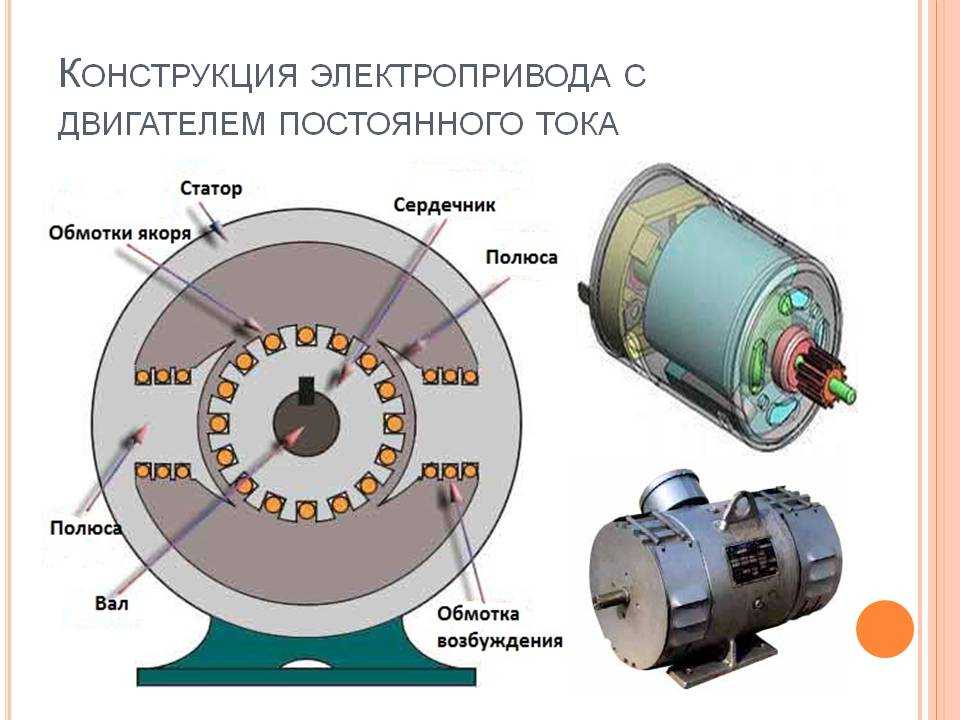
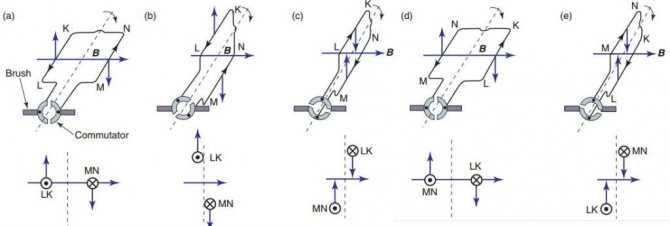
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
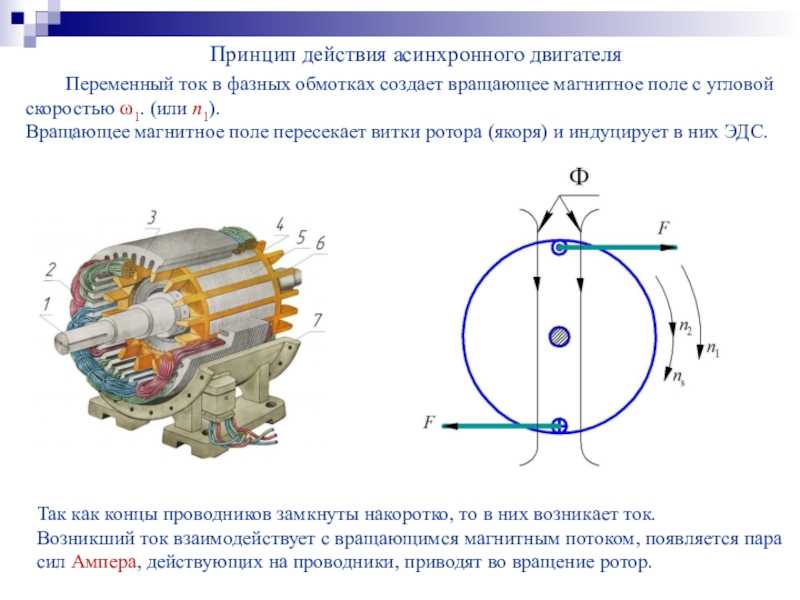
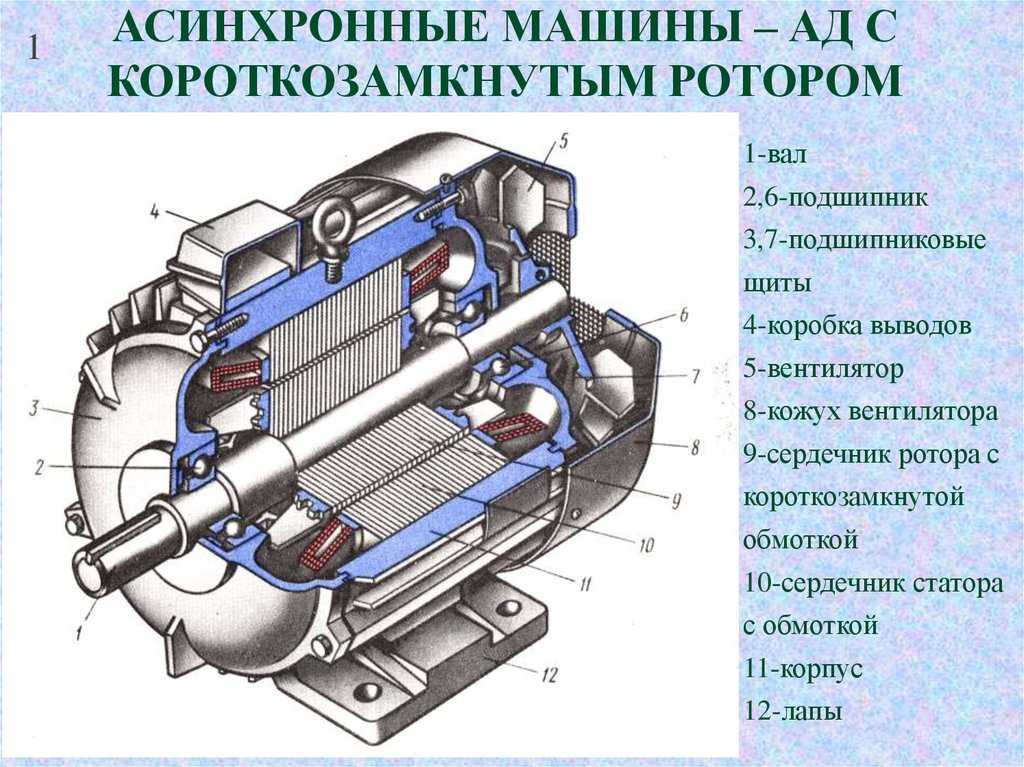
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Пример расчёта полной мощности для электродвигателя
Мощность у электродвигателей бывает полезная или механическая на валу и электрическая. Они отличаются на величину коэффициента полезного действия (КПД), эта информация обычно указана на шильдике электродвигателя.








Отсюда берём данные для расчета подключения в треугольник на Uлинейное 380 Вольт:
- Pна валу=160 кВт = 160000 Вт
- n=0,94
- cosФ=0,9
- U=380
Тогда найти активную электрическую мощность можно по формуле:
P=Pна валу/n=160000/0,94=170213 Вт
Теперь можно найти S:
S=P/cosφ=170213/0,9=189126 Вт
Именно её нужно найти и учитывать, подбирая кабель или трансформатор для электродвигателя. На этом расчёты окончены.
Как снизить вред от пускового тока?
Если изменить схему питания двигателя невозможно (например, сосед по даче каждые пол часа запускает токарный станок, а никакие “методы воздействия” не воздействуют), то можно применить различные методы минимизации вреда от пусковых токов. Например:
- На важные потребители или на весь дом установить инверторный ИБП (UPS), который будет держать напряжение в норме при любом раскладе. Самый дорогой, но действенный способ.
- Поставить стабилизатор напряжения. Но учтите, что не все стабилизаторы одинаково полезны. Иногда они могут не справляться, а иногда – даже усугублять ситуацию. Подробнее – по приведенной ссылке.
- Если питание – однофазное, то можно попробовать переключиться с “плохой” фазы на “хорошую”. Иногда этот способ так же эффективен, как использование телепорта вместо автобуса “Таганрог-Москва”.
Но напоминаю, что мы тут занимаемся не устранением последствий, а предотвращением проблем, поэтому погнали дальше.





