
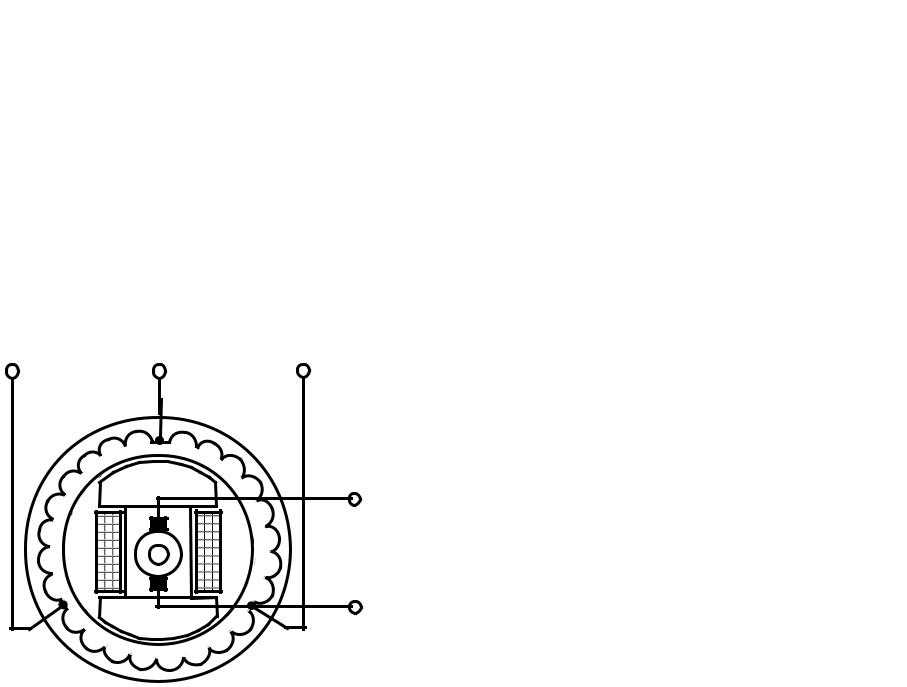
5.18.4 Электромагнитная асинхронная муфта
Электромагнитная асинхронная муфта (рис. 5.18.4.1)
устроена по принципу асинхронного двигателя и служит для соединения двух частей
вала. На ведущей части вала 1 помещается полюсная система 2, представляющая
собой систему явно выраженных полюсов с катушками возбуждения. Постоянный ток
в катушке возбуждения подводится через контактные кольца 4. Ведомая часть муфты
3 исполняется по типу роторной обмотки двигателя.
Принцип работы муфты аналогичен работе асинхронного
двигателя, только вращающийся магнитный поток здесь создается механическим вращением
полюсной системы. Вращающий момент от ведущей части вала к ведомой передается
электромагнитным путем. Разъединение муфты производится отключением тока возбуждения.
Управление электрическим током позволяет осуществлять
дистанционное управление муфтой (плавно сцеплять и расщеплять ее). Поэтому ее
применяют в автоматике и телемеханике.
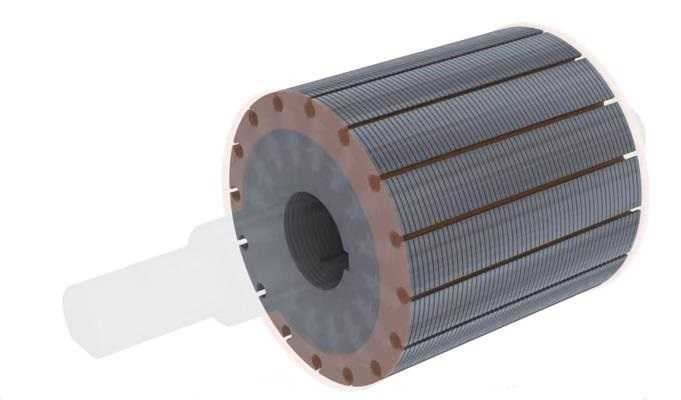
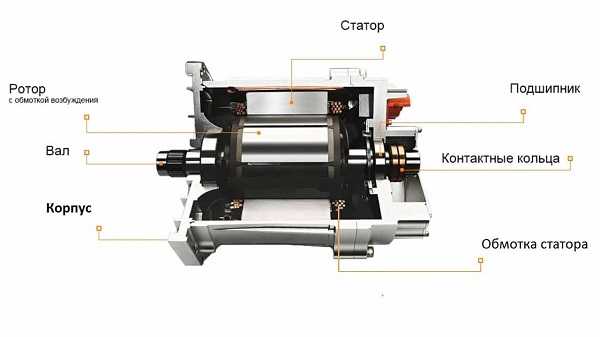
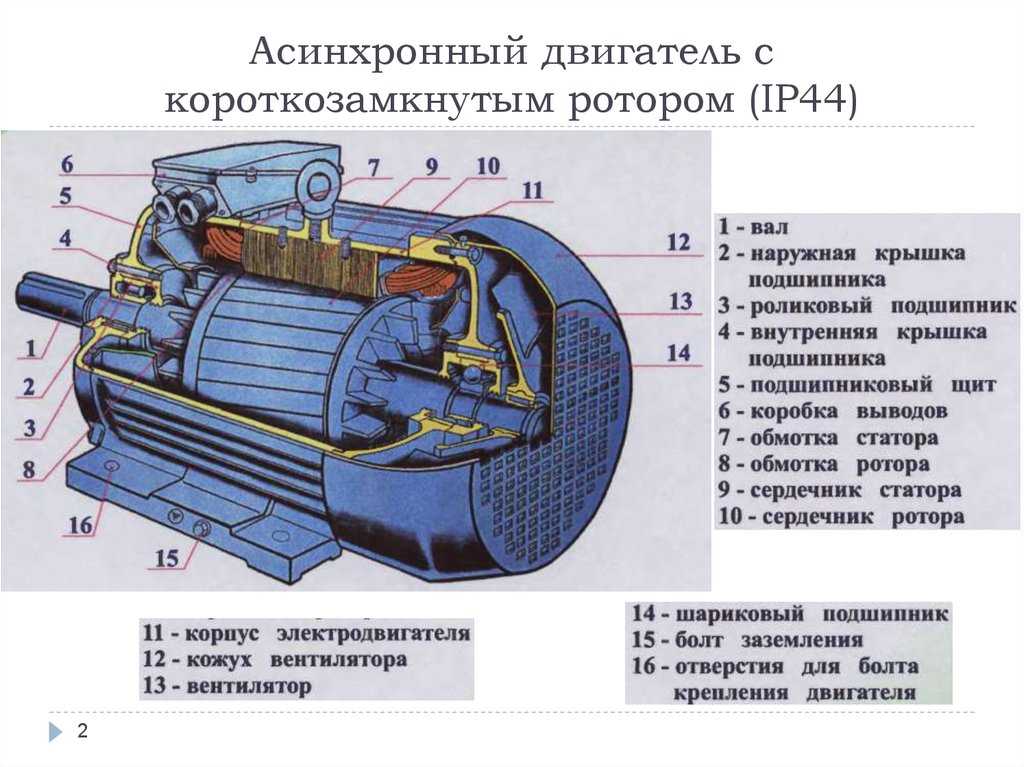
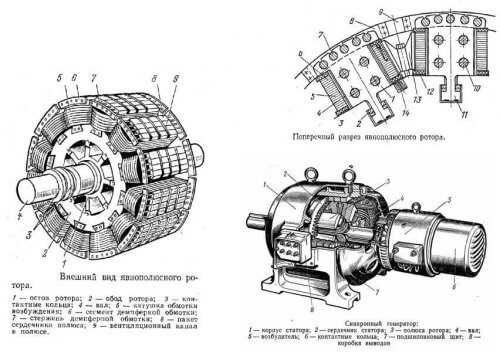
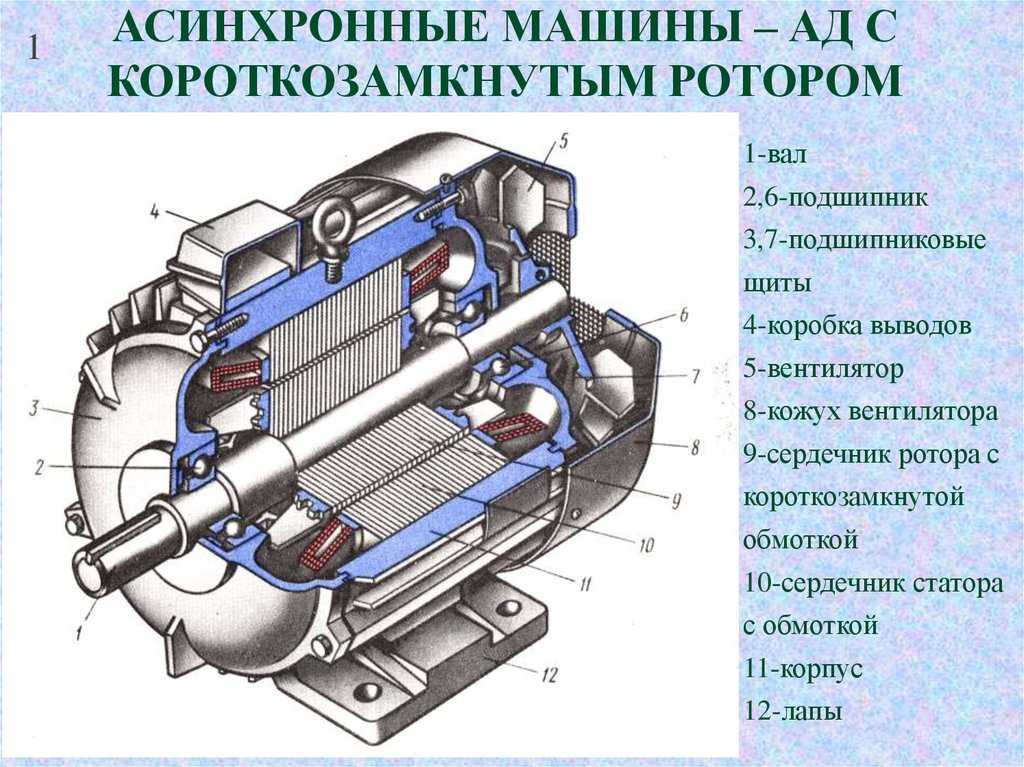
Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.

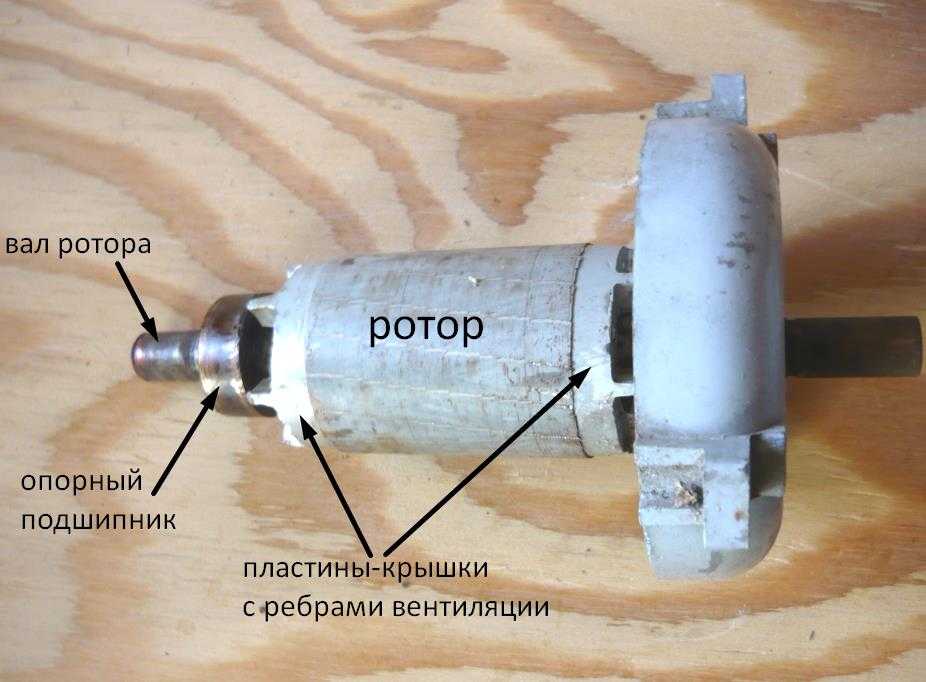
Самая главная часть — это вал. Иначе, как бы происходило вращение?

На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.

Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.

Как вы можете далее заметить, в сердечнике ротора есть специальные пазы
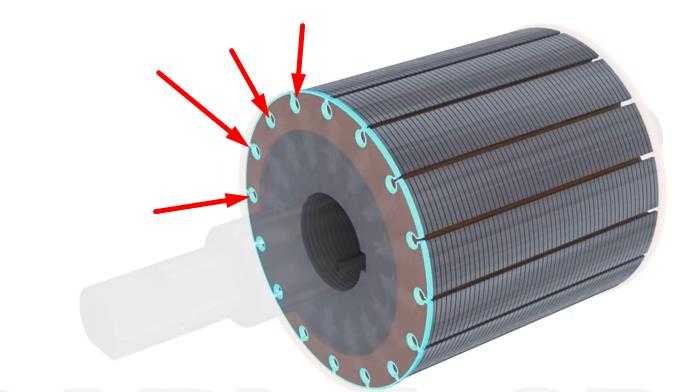
В них вставляются медные или алюминиевые стержни,
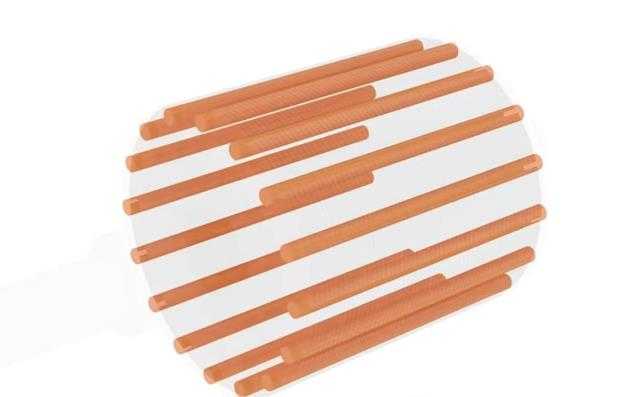
которые замыкаются на кольцо с обеих сторон, образуя так называемую «беличью клетку».

В общем виде полностью собранный ротор асинхронного двигателя выглядит вот так.

А вот так он выглядит в реальном двигателе.
Всегда помните, что в асинхронном двигателе вращается ротор, а не статор. Статор — это неподвижная часть, а ротор — подвижная часть электродвигателя. В рабочем состоянии двигателя между ротором и статором всегда имеется воздушный зазор. При работе двигателя ротор ни в коем случае не должен задевать статор двигателя.

Назначение и конструктивное исполнение
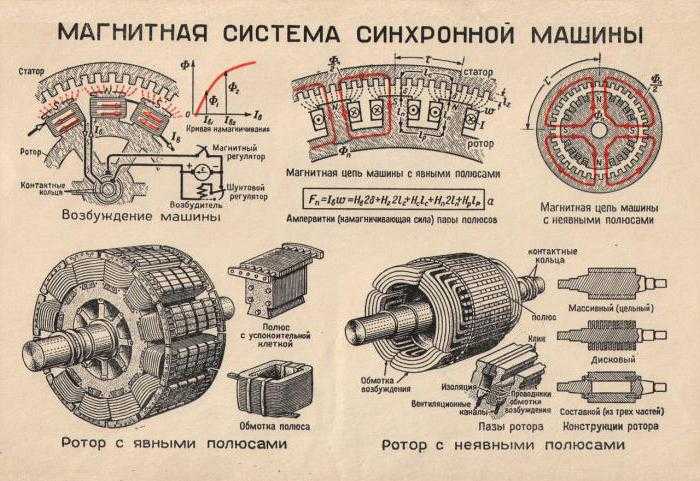
Прежде чем перейти к подробному рассмотрению процесса запуска синхронного двигателя (СД) не лишним будет кратко повторить основные аспекты теории. Что такое СД, как взаимодействуют его элементы, какие виды бывают и почему этот тип эл/приводов так называют. После этого можно рассмотреть способы пуска.




Синхронный двигатель (СД) – электрооборудование, работа которого обеспечивается электродвижущей силой, возникающей при взаимодействии магнитных полей статорного и роторного механизма. Этот принцип является основополагающим для конструирования электромоторов разных видов. Несмотря на единый подход, приводное оборудование имеет свои отличия.
Главная особенность заключается в конструкции подвижного механизма и принципе его вращения. В зависимости от требуемой мощности ротор может:
- содержать постоянные магниты и быть инициатором магнитоэлектрического возбуждения;
- представлять собой электромагниты, инициирующие электромагнитное возбуждение.
Первый вариант применяется для электромашин небольшой мощности. Постоянные магниты изготавливаются из магнитотвердых материалов, способных сохранять состояние намагниченности. Они могут иметь как встроенное, так и поверхностное расположение на роторе.
Второй вид исполнения роторного блока предполагает устройство ферромагнитного сердечника с электрообмоткой. При нахождении под напряжением такая система является источником магнитного потока, взаимодействующего с полем статора.
Определение синхронизма, то есть одинаковости, основано на равенстве частоты оборотов ротора и магнитного поля статора. В этом состоит ключевое отличие принципа действия электрооборудования, определяющее его технические возможности, особенности эксплуатации и область применения. Этот же фактор напрямую влияет на пуск синхронных двигателей.
Критический момент асинхронного двигателя пропорционален формула
Эквивалентная схема асинхронного электродвигателя, рассмотренная в предыдущей статье, дает возможность получить выражение электромагнитного момента, который развивает асинхронный электродвигатель. Мощность, которая потребляется электрической машиной из сети, будет расходоваться не только на полезную работу, но и потери в контуре намагничивания и в обмотках.
Поэтому выражение мощности будет иметь вид:
На основании формулы (1) можно получить такое уравнение:
В свою очередь мощность электромагнитную можно выразить и таким способом:
Из выше перечисленных уравнений можем получить значение электромагнитного момента:
Помножив знаменатель и числитель этого выражения на S 2 и в целях упрощения вида уравнения примем значение Хк = Х1 + Х2 / . Хк – сопротивление индуктивное асинхронного электродвигателя при коротком замыкании:
Для упрощения записи, как в равенстве (5), индекс «эм» будет пропускаться.
Момент электромагнитный асинхронной машины представляет собой довольно сложную функцию скольжения S. Для того, чтоб найти максимум момента асинхронной машины приравняем производную S нулю:

Производная станет равна нулю только в том случае, если стоящий в скобках числителя множитель равен будет нулю:
Откуда можно выразить скольжение:
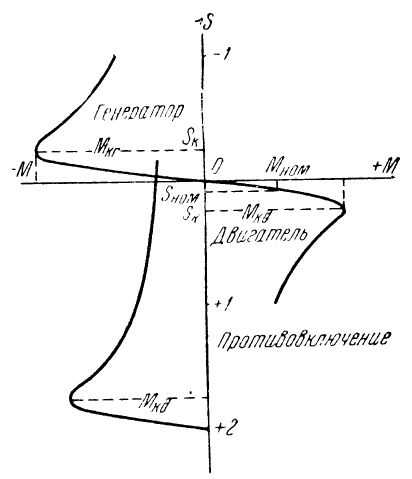
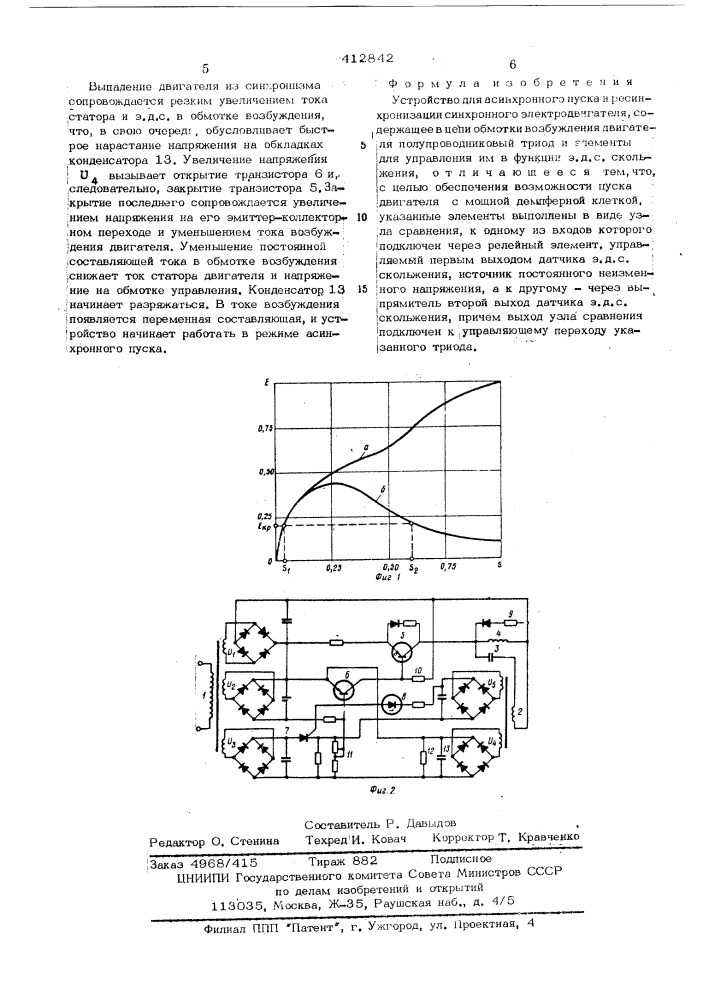
Sк называют критическим, так как при переходе S = Sк момент двигателя уменьшится. Это происходит из-за того, что при увеличении роторного тока (S > Sк) его активная часть не вырастет, а наоборот, уменьшится, что в свою очередь приведет к снижению момента.
Если Sк положительно – это режим работы двигательный, а если отрицательный – генераторный.
В асинхронных машин большой мощности r1 значительно меньше, чем Хк, и, как правило, лежит в пределах r1 = 0,1 – 0,12Хк. Поэтому величина r1 2 существенно мала, по сравнению Хк, и ею можно пренебречь без ущерба для точности:
Подставив положительные значения Sк (6) в выражение (5), найдем значение критического момента для двигательного режима:
Раскрыв скобки в знаменателе (8) и сократив дробь величине Мкд получим:
Для машин большой мощности для которых величиной r1 можно пренебречь выражение (9) примет вид:
Аналогичным образом получается значение критического момента для генераторного режима:
Отношение моментов генераторного и двигательного режимов работы АД:
Поделив числитель и знаменатель на и обозначив соотношение выражение (12) примет вид:
Также ε можно еще выразить как:
Так как асинхронные электродвигатели обычно имеют r1 ≈ r2 / , то приближенно можем принять:
Из выражений (12) и (13) можно увидеть, что в генераторном режиме значение критического момента будет больше, чем в двигательном. Это объясняется влиянием падения напряжения в активном сопротивлении статорной обмотки.



Отношение момента электромагнитного, к его критическому значению в двигательном режиме Мдк = Мк, будет иметь вид:
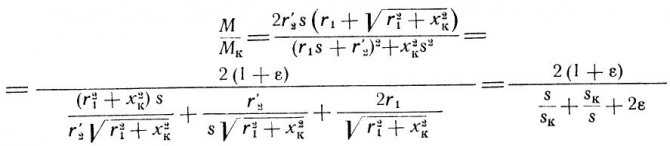
Данное выражение представляет собой уточненное уравнение механической характеристики асинхронного электродвигателя.
Если принять, как это делалось выше, r1 = 0, то тогда ε = 0 и взамен (15) получим упрощенное уравнение для механической характеристики:
М, выраженный формулами (5), (15) и (16), является функцией скольжения S. Задаваясь различными значениями скольжения S можно построить механическую характеристику асинхронной машины.
Ниже показана механическая характеристика построенная по формуле (15):
Для машин асинхронных трехфазных с короткозамкнутым ротором общего применение мощностью 0,6 – 100 кВт соотношение должны лежать в пределах 1,7 – 2,2; причем большее значение соответствует большей скорости вращения ротора 3000 об/мин, а меньшее — 750 об/мин. Для машин мощность свыше 100 кВт должны иметь λм = 1,7 – 1,8. Для крановых и металлургических:
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.


Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
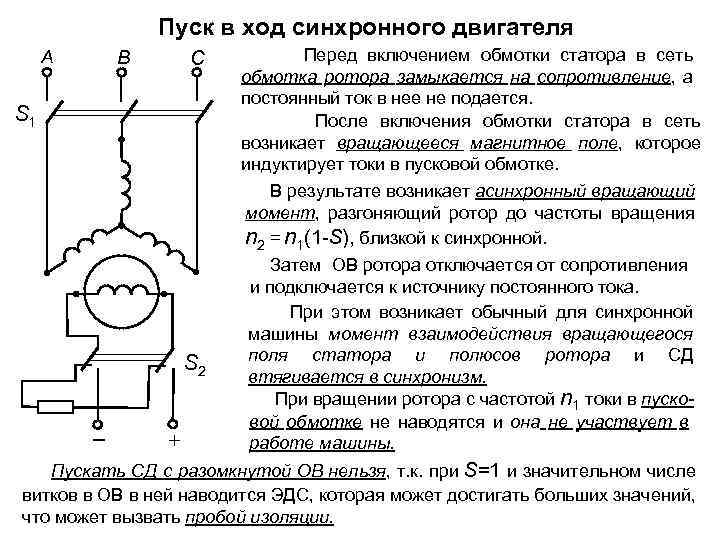
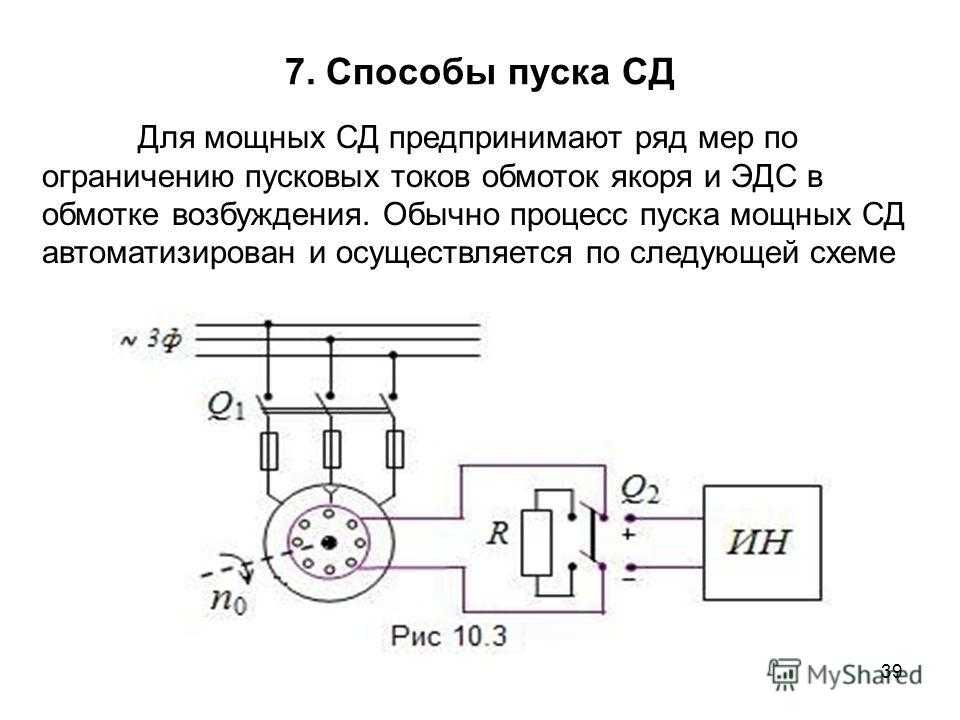
Способы пуска
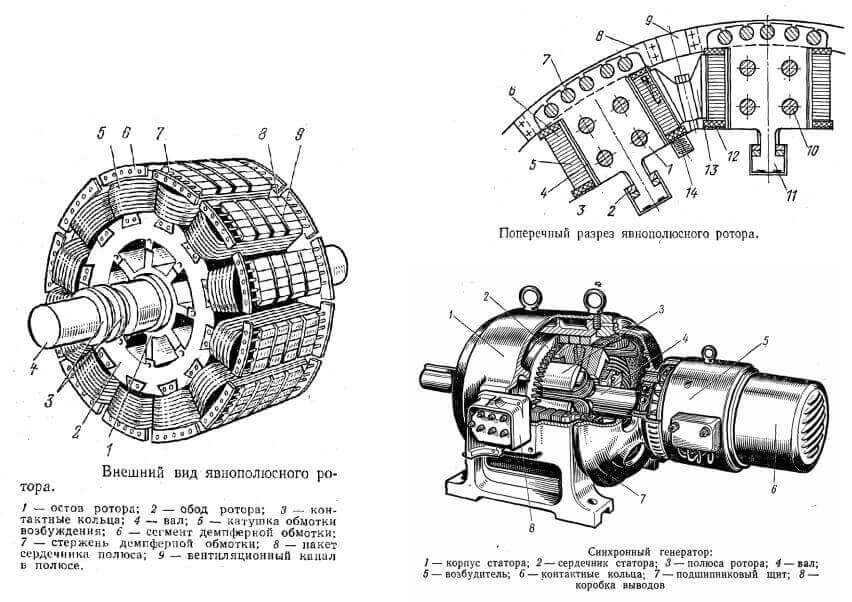
Пуск синхронных электродвигателей можно осуществить тремя способами – с помощью дополнительного двигателя, асинхронный и частотный запуск. При выборе способа учитывается конструкция ротора.
Он выполняется с постоянными магнитами, с электромагнитным возбуждением или комбинированным. Наряду с обмоткой возбуждения на роторе смонтирована короткозамкнутая обмотка – беличья клетка. Её также называют демпфирующей обмоткой.

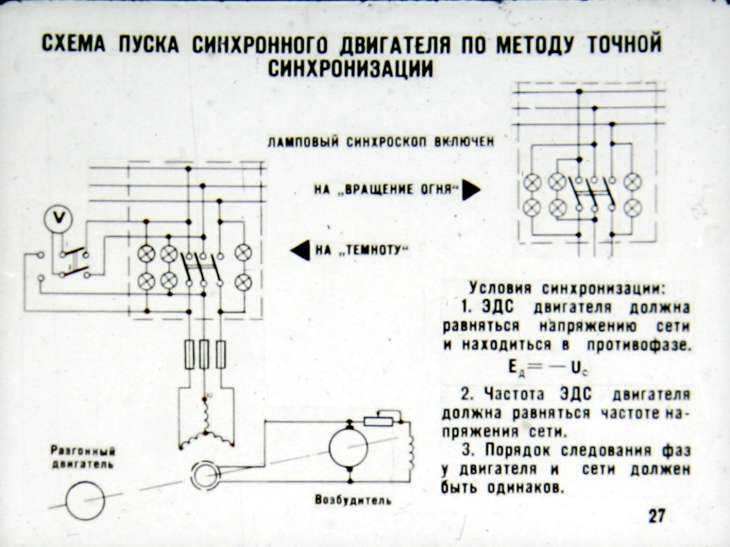
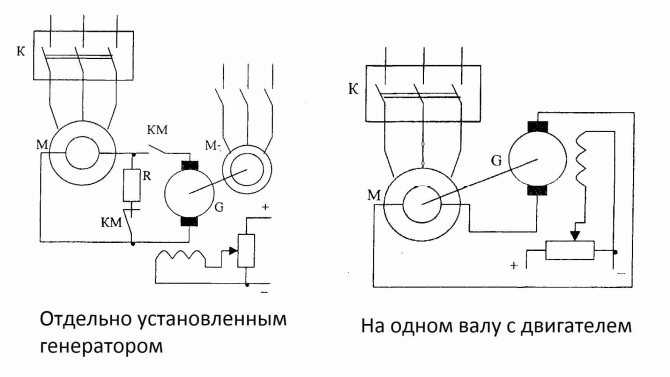
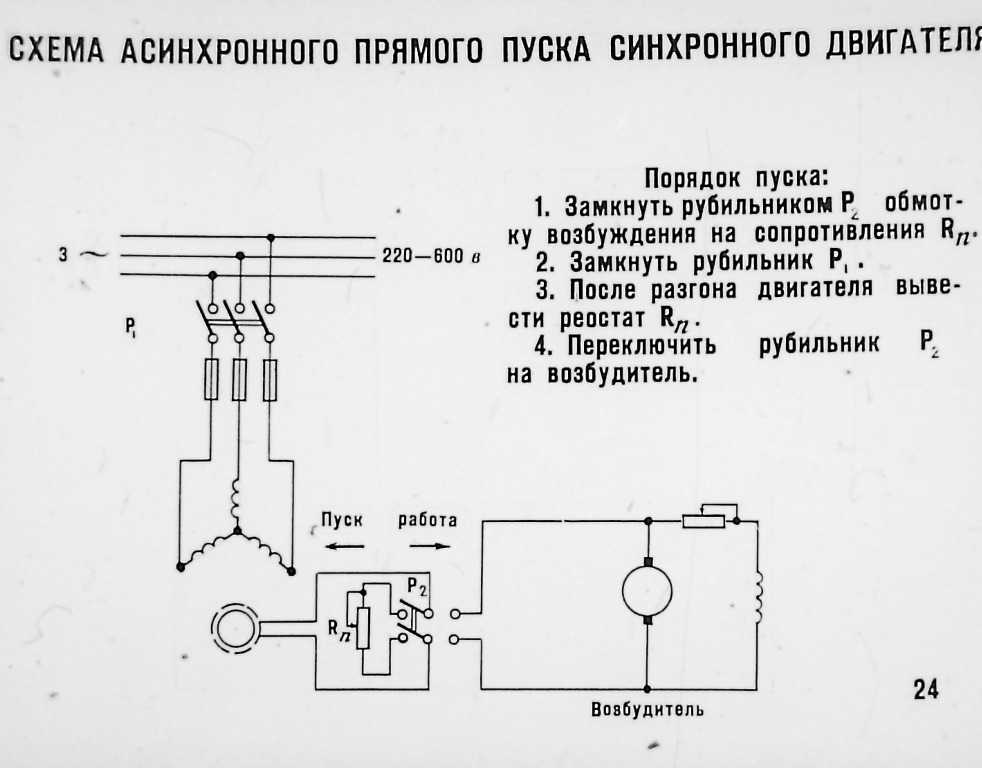
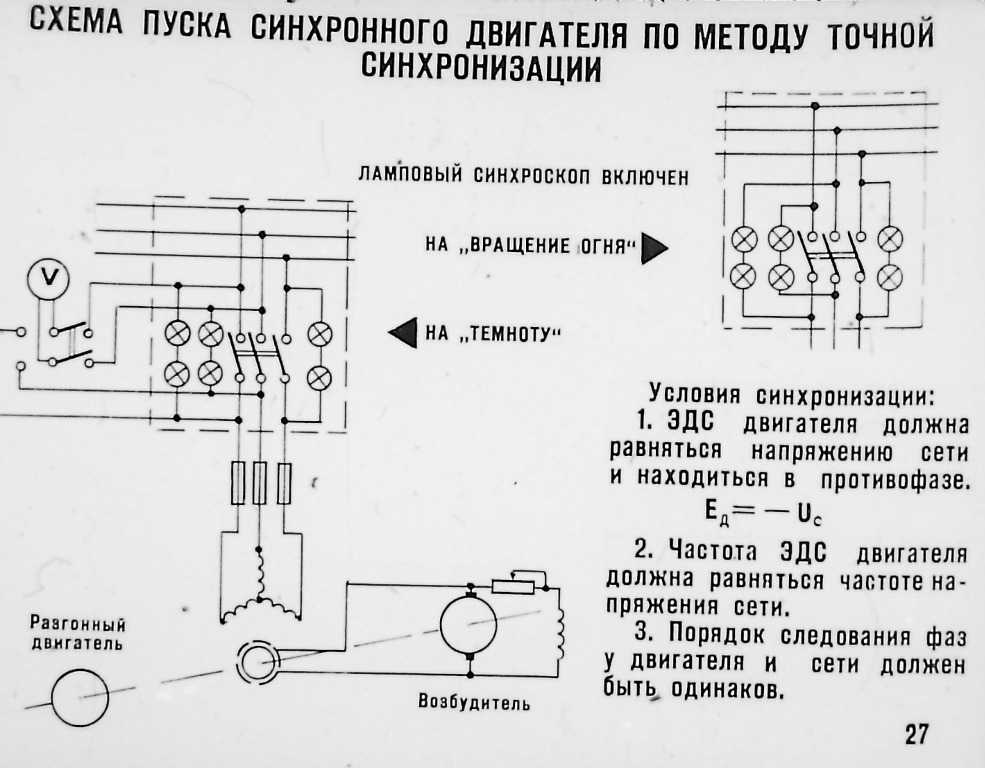
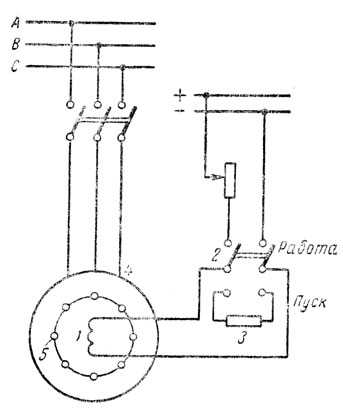
Запуск с помощью разгонного двигателя
Этот метод пуска редко применяется на практике, потому что его сложно реализовать технически. Требуется дополнительный электродвигатель, который механически соединен с ротором синхронного двигателя.
С помощью разгонного двигателя раскручивается ротор до значений близких к скорости вращения поля статора (к синхронной скорости). После чего на обмотку возбуждения ротора подают постоянное напряжение.
Контроль осуществляется по лампочкам, которые включены параллельно рубильнику, подающему напряжение на обмотки статора. Рубильник должен быть отключен.
В первоначальный момент лампы мигают, но при достижении номинальных оборотов они перестают гореть. В этот момент подают напряжение на обмотки статора. После чего синхронный электродвигатель может работать самостоятельно.
Затем дополнительный мотор отключается от сети, а в некоторых случаях его отсоединяют механически. В этом состоят особенности пуска с разгонным электродвигателем.
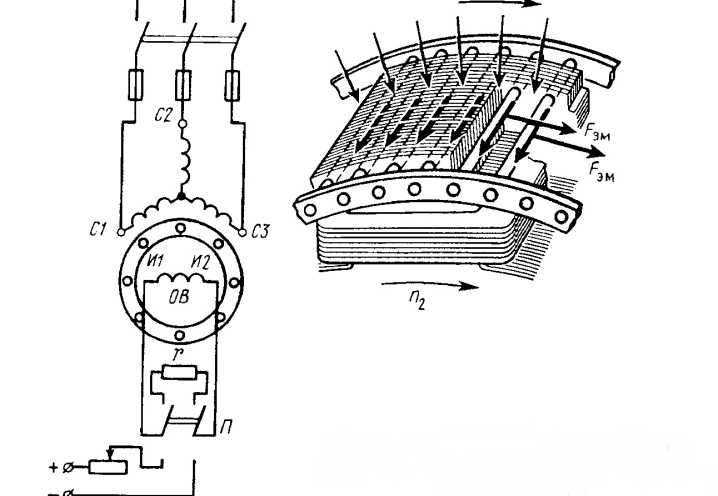
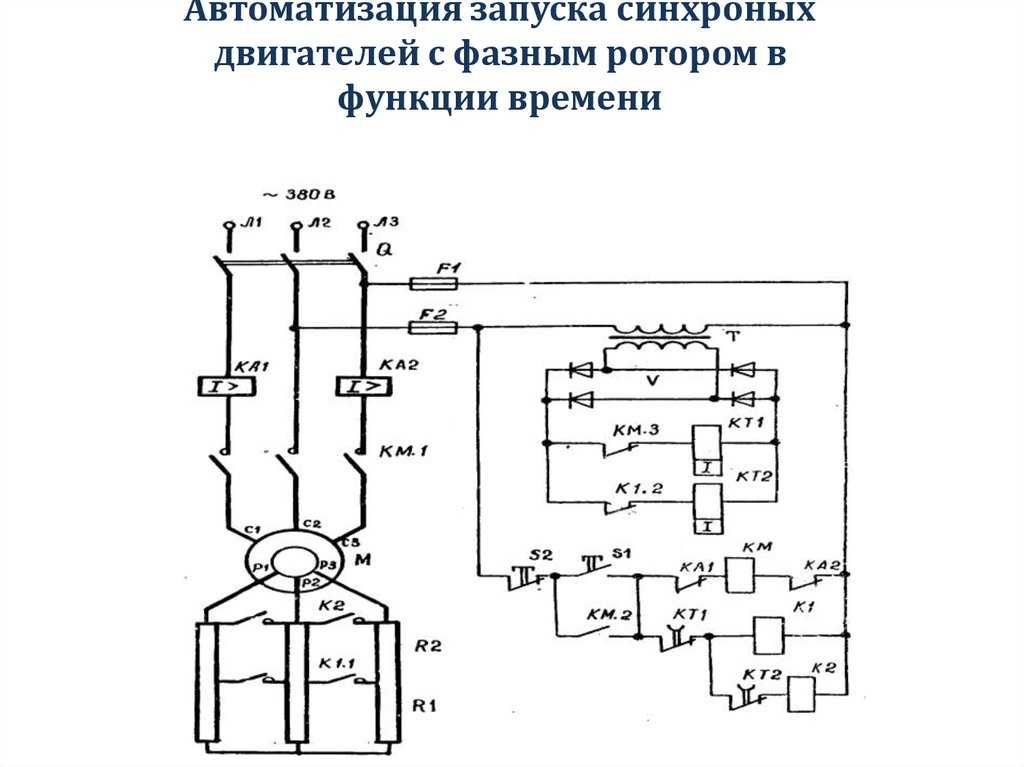
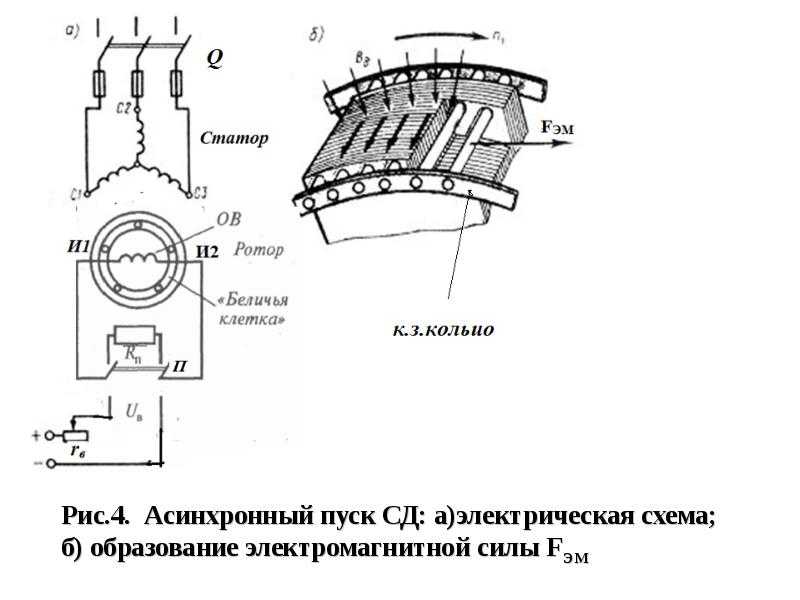
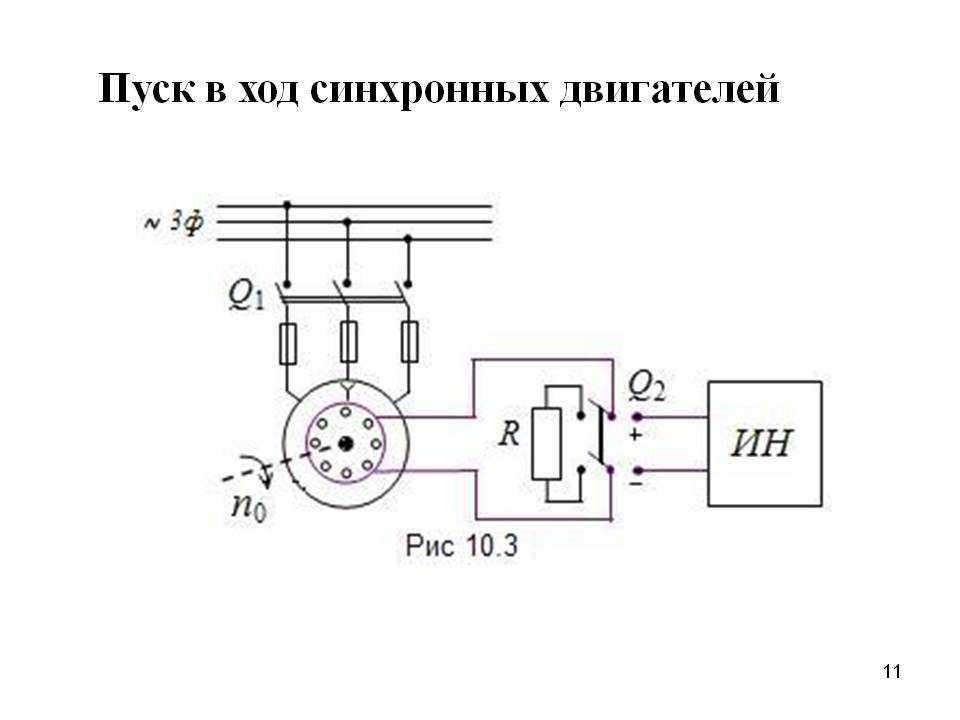
Асинхронный запуск
Метод асинхронного пуска на сегодня самый распространенный. Такой запуск стал возможен после изменения конструкции ротора. Его преимущество в том, что не нужен дополнительный разгонный двигатель, так как дополнительно к обмотке возбуждения в ротор вмонтировали короткозамкнутые стержни беличьей клетки, что дало возможность запускать его в асинхронном режиме. При таком условии этот способ пуска и получили широкое распространение.
Сразу же рекомендуем просмотреть видео по теме:
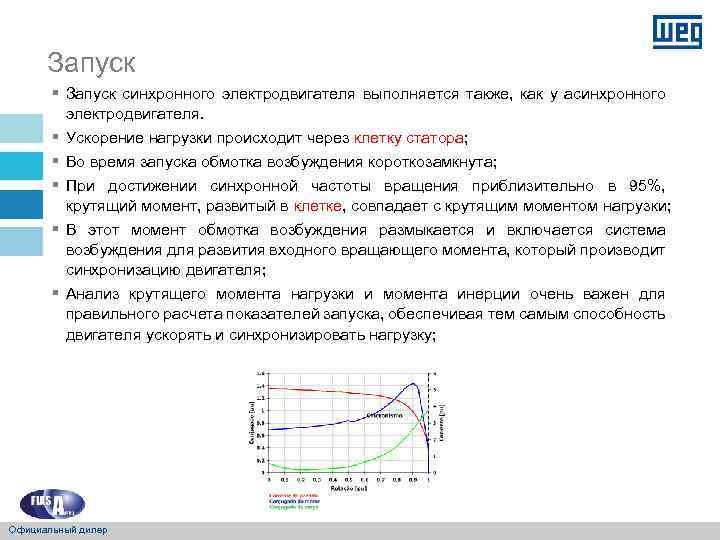
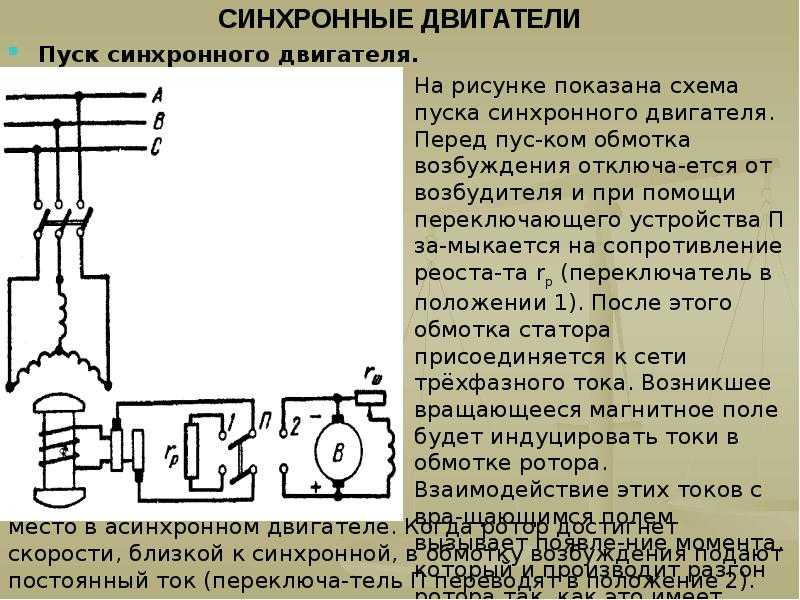
При подаче напряжения на обмотку статора происходит разгон двигателя в асинхронном режиме. После достижения оборотов близких к номинальным, включается обмотка возбуждения.
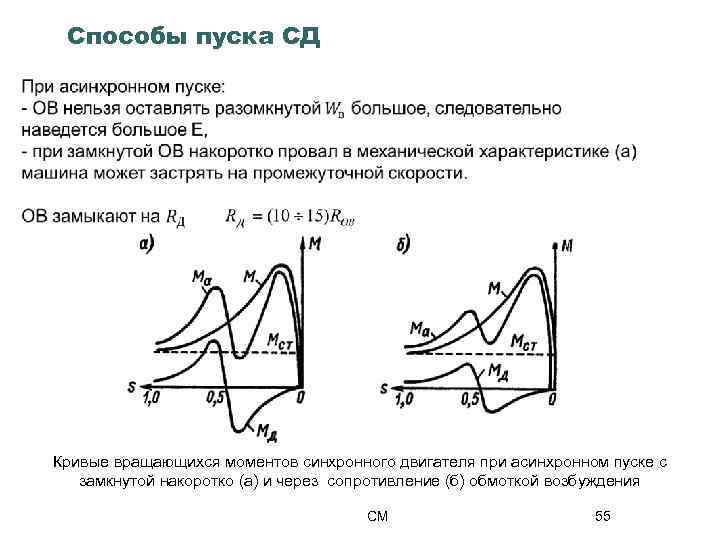
Электрическая машина входит в режим синхронизма. Но не все так просто. Во время пуска в обмотке возбуждения возникает напряжение, которое возрастает с ростом оборотов. Оно создает магнитный поток, который воздействует на токи статора.
При этом возникает тормозящий момент, который может приостановить разгон ротора. Для уменьшения вредного воздействия обмотки возбуждения подключают к разрядному или компенсационному резистору. На практике эти резисторы представляют собой большие тяжелые ящики, где в качестве резистивного элемента используются стальные спирали. Если этого не сделать, то из-за возрастающего напряжения может произойти пробой изоляции. Что повлечет выход оборудования из строя.
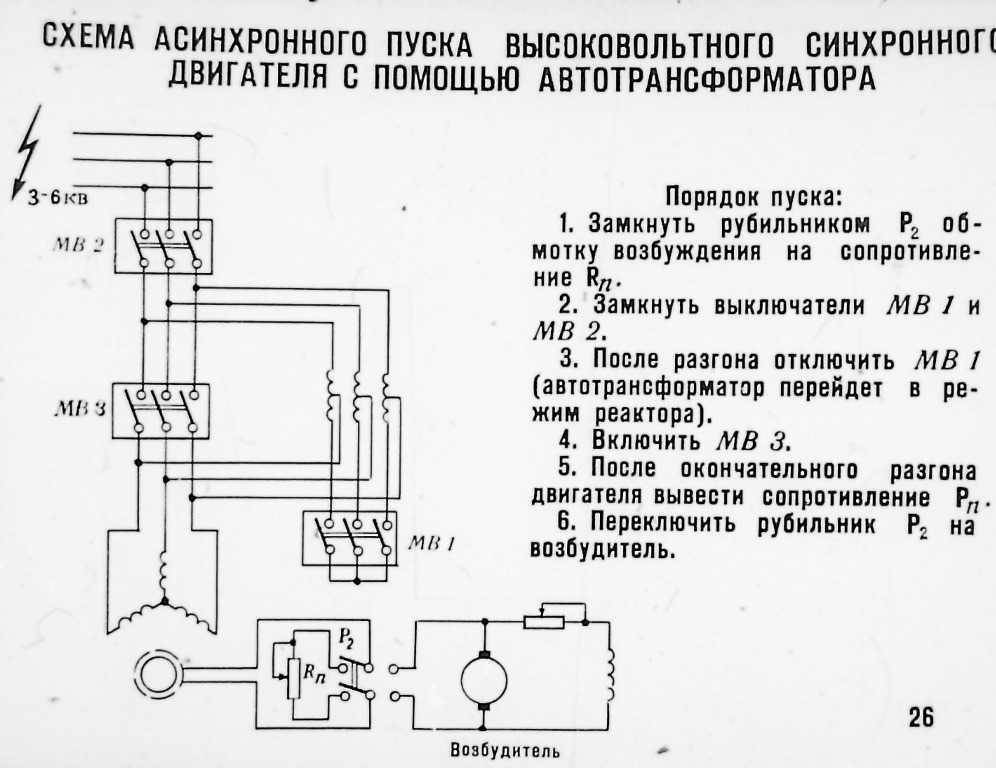
После достижения подсинхронной частоты вращения, от обмотки возбуждения отключаются резисторы, и на нее подается постоянное напряжение от генератора (в системе генератор-двигатель) или от тиристорного возбудителя (такие устройства называются ВТЕ, ТВУ и так далее, в зависимости от серии). В результате чего двигатель переходит в синхронный режим.
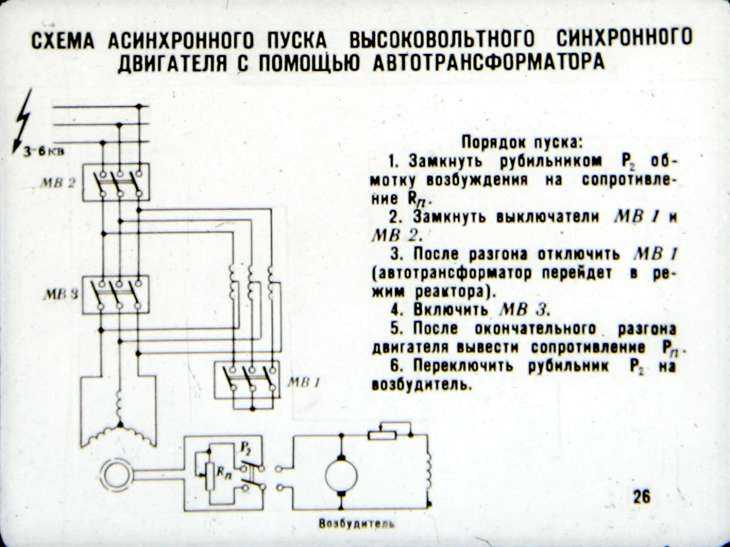
Недостатками этого метода являются большие пусковые токи, что вызывает значительную просадку напряжения питающей сети. Это может повлечь за собой остановку других синхронных машин, работающих на этой линии, в результате срабатывания защит по низкому напряжению. Для уменьшения этого воздействия цепи обмоток статора подключают к компенсационным устройствам, которые ограничивают пусковые токи.
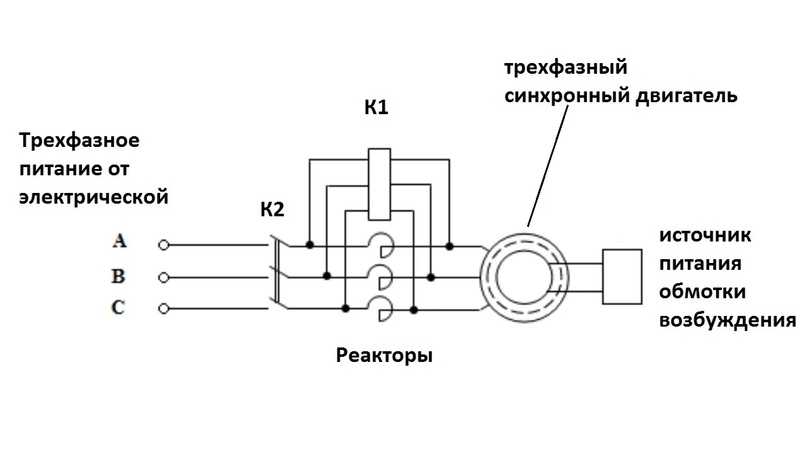
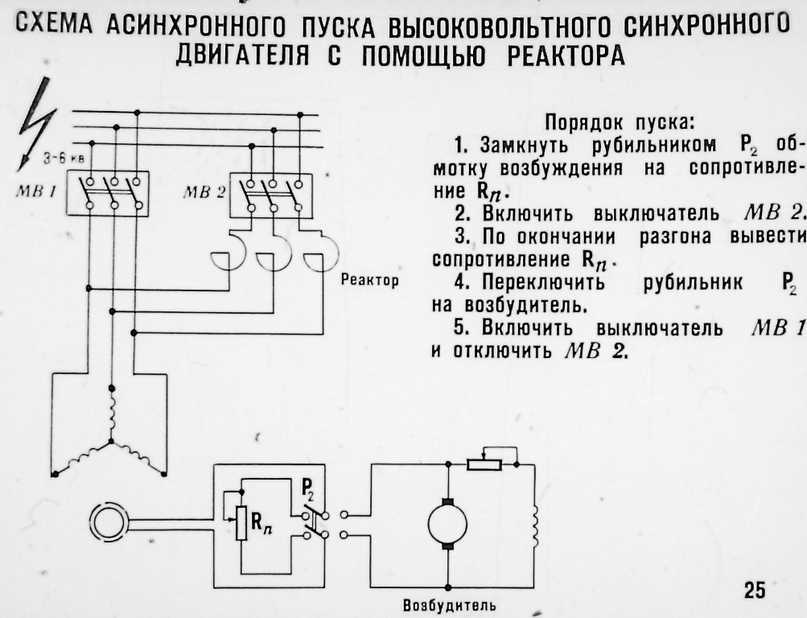
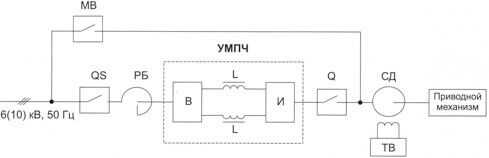
Частотный пуск
Частотный пуск синхронных двигателей применяется для запуска устройств большой мощности (от 1 до 10 МВт) с рабочим напряжением 6, 10 Кв, как в режиме легкого запуска (с вентиляторным характером нагрузки), так и с тяжелым пуском (приводов шаровых мельниц). Для этих целей выпускаются устройства мягкого частотного пуска.
Принцип работы аналогичен высоковольтным и низковольтным устройствам, работающим по схеме преобразователя частоты. Они обеспечивают пусковой момент до 100% от номинала, а также обеспечивают запуск нескольких двигателей от одного устройства. Пример схемы с устройством плавного пуска вы видите ниже, оно включается на время запуска двигателя, а затем выводится из схемы, после чего двигатель включается в сеть напрямую.
Момент электродвигателя
Мощность связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени.
Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц.


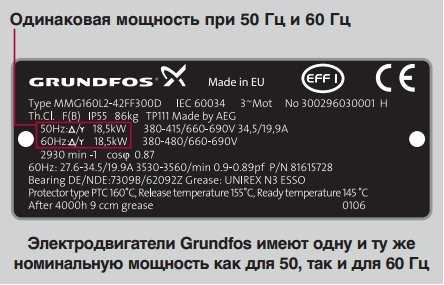
Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц.
Графическое представление вращающего момента электродвигателя изображено на рисунке.
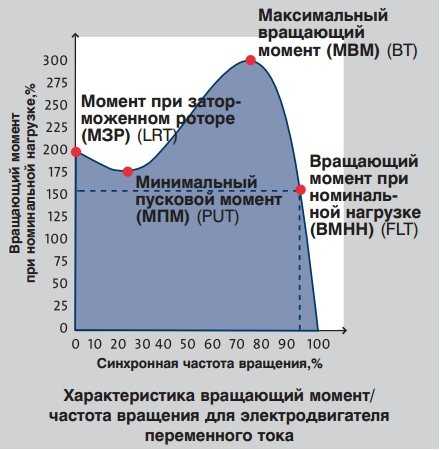
Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока.
Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен.
Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент.
Блокировочный момент (Мблок): Максимальный вращающий момент — момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом.
Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке.
Что такое максимальный момент асинхронного двигателя
В рамках современной теории асинхронных электрических машин применяют ряд терминов связанных с понятием момента. Часть этих терминов относится к моменту создаваемому на валу (на роторе) электродвигателя. Другая группа терминов определяет моменты создаваемые механической нагрузкой подключенной к валу электрического двигателя.
Эти термины определяют как сам момент развиваемый двигателем, так и различный состояния момента на выходном валу двигателя. Под состоянием подразумевается значение момента в кретических точках. Например номинальный момент или пусковой момент.
Вот перечень терминов, которые нам приходилось встречать в литературе:
Электромагнитный момент под которым понимают момент ротора двигателя возникающий при воздействии электромагнитного поля. Данный термин часто заменяют синонимами: вращающий момент или крутящий момент. На нашем сайте есть более полная статья про электромагнитный момент асинхронного двигателя.
Пусковой момент — это значение момента в момент трогания ротора. Данный момент в литературе часто называют моментом трогания или начальным пусковым моментом электродвигателя. Более полную информацию можно получить в материале про пусковой момент асинхронника.
Номинальный момент — значение момента создаваемое электромагинитным полем на валу двигателя при номинальных параметрах двигателя и номинальных внешинх условиях. Дополнительные сведения про термин номинальный момент можно получить в статье про асинхронные двигатели и их номинальный момент.
Под критическим моментом понимают наивысшее или максимльно возможное значение. В случае если момент нагрузки превысит величину критического момента, то двигатель остановится. Поэтому в литературе в качестве синонима встречается так же термин: максимальный вращающий момент электродвигателя переменного тока. Данный термин подробно рассмотрен в статье про критический момент асинхронного двигателя.
Тормозной момент — момент возникающий под действием электромагнитных сил на роторо асинхронного двигателя и противоположный по знаку вращающему моменту. Часто встречается в литературе термин синоним: тормозящий момент. Подробное обсуждение понятия тормозной момент асинхронного двигателя здесь.
Момент нагрузки, называемый еще и момент сопротивления — параметр относящийся к механической системе подключенной к валу асинхронного двигателя. Здесь более полный анализ термина момент сопротивления.
Другие статьи про момент электродвигателя на нашем сайте:
Источник
Вращающий момент, развиваемый на валу асинхронного электродвигателя в условиях нулевой скорости вращения ротора (когда ротор еще неподвижен) и установившегося в обмотках статора тока, — называется пусковым моментом асинхронного двигателя.
Пусковой момент иногда называют еще моментом трогания или начальным моментом. При этом подразумевается, что напряжение и частота питающего напряжения приближены к номиналу, причем соединение обмоток выполнено правильно. В номинальном режиме работы данный двигатель будет работать именно так, как предполагали разработчики.

Численное значение пускового момента
Пусковой момент вычисляется по приведенной формуле. В паспорте электродвигателя (паспорт предоставляется производителем) указана кратность пускового момента.


Обычно значение величины кратности лежит в пределах от 1,5 до 6, в зависимости от типа двигателя
И при выборе электродвигателя для своих нужд, важно убедиться, что пусковой момент окажется больше статического момента планируемой проектной нагрузки на валу. Если это условие не соблюсти, то двигатель попросту не сможет развить рабочий момент при вашей нагрузке, то есть не сможет нормально стартонуть и разогнаться до номинальных оборотов
Давайте рассмотрим еще одну формулу для нахождения пускового момента. Она будет вам полезной для теоретических расчетов. Здесь достаточно знать мощность на валу в киловаттах и номинальные обороты, — все эти данные указаны на табличке (на шильдике). P2-номинальная мощность, F1-номинальные обороты. Итак, вот эта формула:
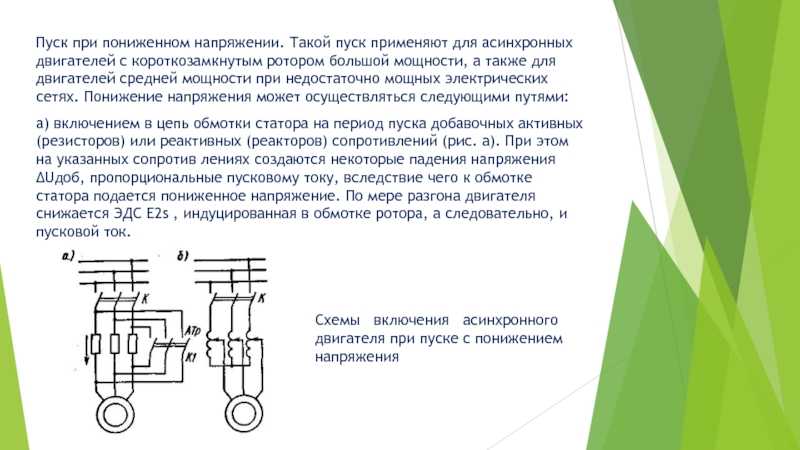
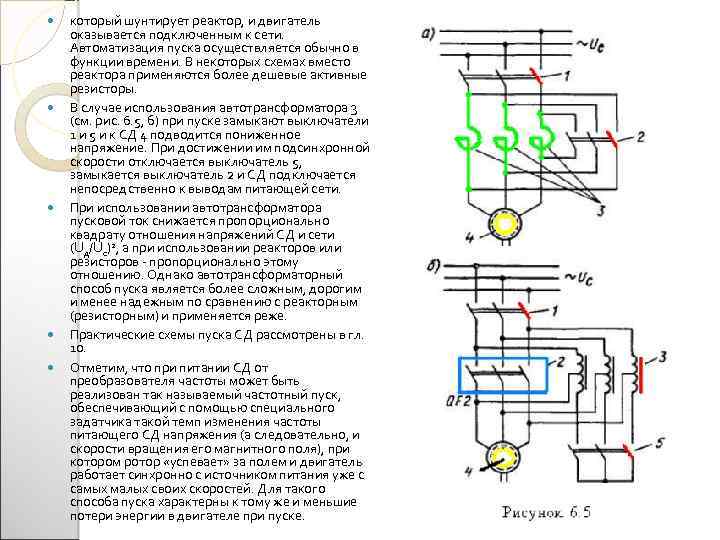
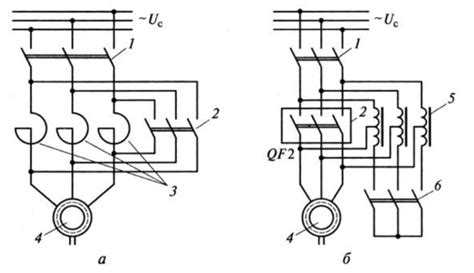
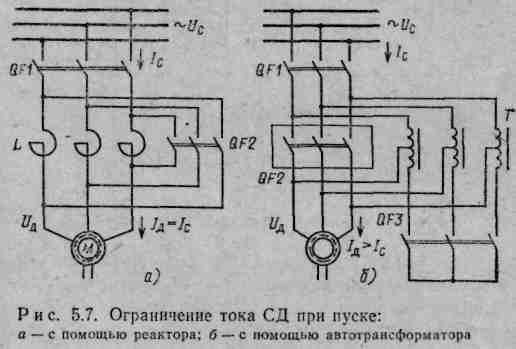
Пуск с понижением напряжения
Подходит для запуска электродвигателя высокой мощности, но так же оптимален для аналогов средней, если напряжение в рабочей сети не позволяем разогнать мотор с помощью прямого пуска.
Для понижения напряжения существует три способа:
- Переключение намоток статора с треугольника (нормальная схема) на звезду (пусковая схема). Запуск начинается со звезды, а при достижении номинальной частоты происходит переключение на треугольник. При этом напряжение, питающее фазы статорных обмоток, падает в 1,73 раз. Это позволяет уменьшиться во столько же раз фазным токам, а линейные сокращаются втрое.
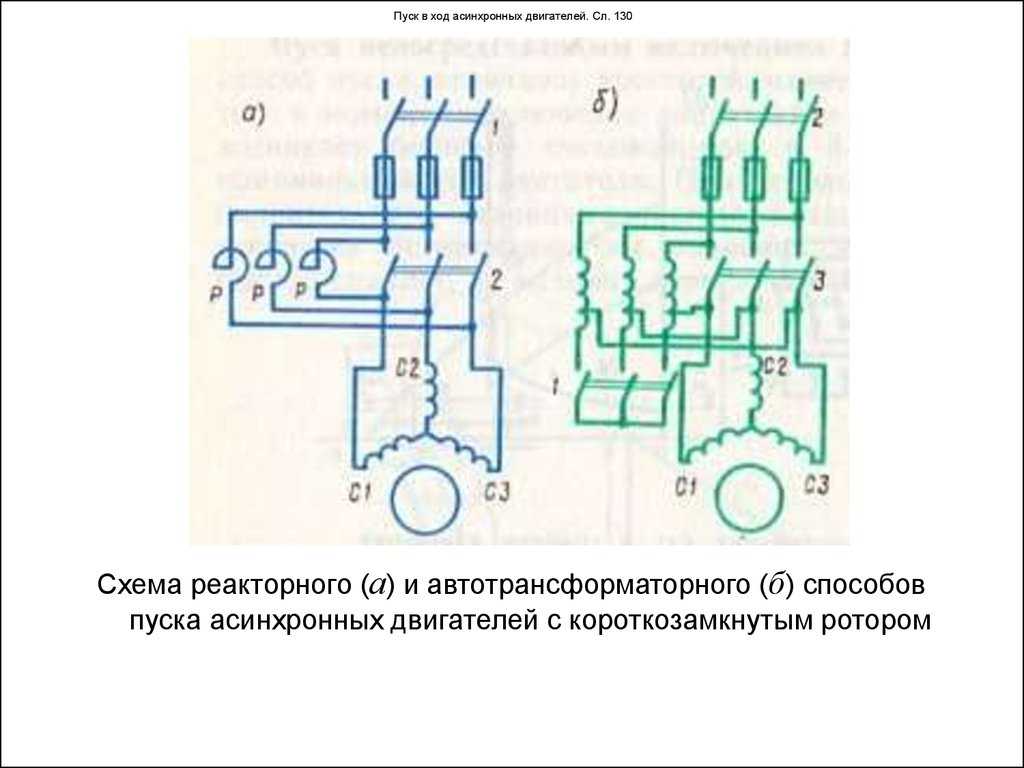
- Запуск с добавочным сопротивлением, приводящим к падению вольтажа на статорной обмотке (рисунок а). На момент пуска в электроцепь включают реакторы или резисторы (реактивное и активное сопротивление соответственно).
- Пуск с подключением через трансформатор понижающего типа с несколькими автоматически переключаемыми ступенями (рисунок б).
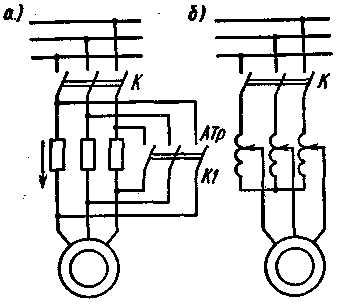
Главное преимущество – возможность разгона двигателя почти при том же напряжении, которое необходимо для нормальной работы. К недостаткам относится лишь падение Мп и Ммакс (максимальный момент). Эти величины прямо пропорционально зависят от напряжения: чем меньше Вольт, тем меньше моменты. Поэтому с нагрузкой мотор не запустится.
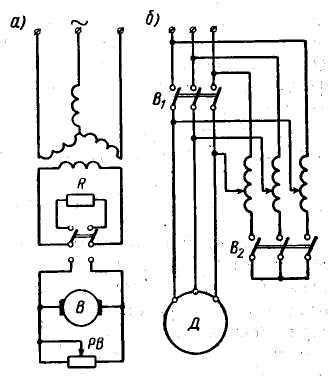
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Производители электродвигателей
Российские производители электродвигателей
| Регион | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Краснодарский край | Армавирский электротехнический завод | |||||||||
| Свердловская область | Баранчинский электромеханический завод | |||||||||
| Владимир | Владимирский электромоторный завод | |||||||||
| Санкт-Петербург | ВНИТИ ЭМ | |||||||||
| Москва | ЗВИМосковский электромеханический завод имени Владимира Ильича | |||||||||
| Пермь | ИОЛЛА | |||||||||
| Республика Марий Эл | Красногорский завод «Электродвигатель» | |||||||||
| Воронеж | МЭЛ | |||||||||
| Новочеркасск | Новочеркасский электровозостроительный завод | |||||||||
| Санкт-Петербург | НПО «Электрические машины» | |||||||||
| Томская область | НПО Сибэлектромотор | |||||||||
| Новосибирск | НПО Элсиб | |||||||||
| Удмуртская республика | Сарапульский электрогенераторный завод | |||||||||
| Киров | Электромашиностроительный завод Лепсе | |||||||||
| Санкт-Петербург | Ленинградский электромашиностроительный завод | |||||||||
| Псков | Псковский электромашиностроительный завод | |||||||||
| Ярославль | Ярославский электромашиностроительный завод |
Аббревиатура:
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СРД — синхронный реактивный двигатель
- СГД — синхронный гистерезисный двигатель
- УД — универсальный двигатель
- КДПТ — коллекторный двигатель постоянного тока
- КДПТ ОВ —
- КДПТ ПМ —
Производители электродвигателей ближнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Беларусь | Могилевский завод «Электродвигатель» | |||||||||
| Беларусь | Полесьеэлектромаш | |||||||||
| Украина | Харьковский электротехнический завод «Укрэлектромаш» | |||||||||
| Молдова | Электромаш | |||||||||
| Украина | Электромашина | |||||||||
| Украина | Электромотор | |||||||||
| Украина | Электротяжмаш |
Производители электродвигателей дальнего зарубежья
| Страна | Производитель | Асинхронный двигатель | Синхронный двигатель | УД | КДПТ | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| СДОВ | СДПМ, серво | СРД, СГД | Шаговый | |||||||
| Швейцария | ABB Limited | |||||||||
| США | Allied Motion Technologies Inc. | |||||||||
| США | Ametek Inc. | |||||||||
| США | Anaheim automation | |||||||||
| США | Arc System Inc. | |||||||||
| Германия | Baumueller | |||||||||
| Словения | Domel | |||||||||
| США | Emerson Electric Corporation | |||||||||
| США | General Electric | |||||||||
| США | Johnson Electric Holdings Limited | |||||||||
| Германия | Liebherr | |||||||||
| Швейцария | Maxon motor | |||||||||
| Япония | Nidec Corporation | |||||||||
| Германия | Nord | |||||||||
| США | Regal Beloit Corporation | |||||||||
| Германия | Rexroth Bosch Group | |||||||||
| Германия | Siemens AG | |||||||||
| Бразилия | WEG |
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
И.В.Савельев. Курс общей физики, том I. Механика, колебания и волны, молекулярная физика.-М.:Наука, 1970.
ГОСТ 29322-92 (МЭК 38-83) Стандартные напряжения.
ГОСТ 16264.0-85 Электродвигатели малой мощности
А.И.Вольдек, В.В.Попов. Электрические машины. Машины переменного тока: Учебник для вузов.- СПб.: Питер, 2007.
Paul Waide, Conrad U. Brunner. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. International Energy Agency Working Paper, Energy Efficiency Series.: Paris, 2011.
Dr. J. Merwerth. The hybrid-synchronous machine of the new BMW i3 & i8 challenges with electric traction drives for vehicles. BMW Group, Workshop University Lund: Lund, 2014.





