Синхронные двигатели переменного тока
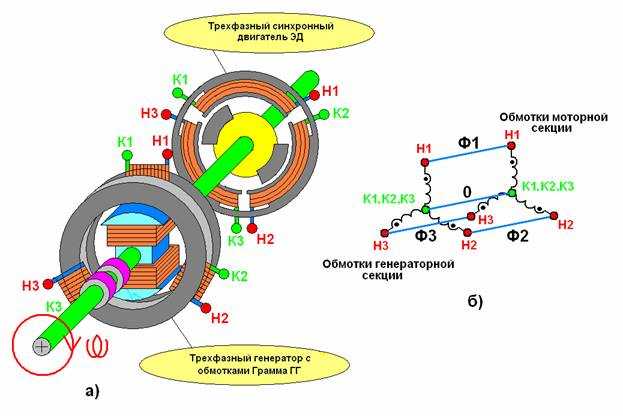
Как и в асинхронных электродвигателях, вращение ротора в синхронных машинах достигается взаимодействием полей ротора и статора. Скорость вращения ротора таких электрических машин равна частоте магнитного поля, создаваемого обмотками статора.
Обмотка неподвижной части двигателя рассчитана на питание от трехфазного напряжения. К электромагнитам ротора подключается постоянное напряжение. Различают явнополюсные и неявнополюсные обмотки. В синхронных двигателях малой мощности используют постоянные магниты.
Запуск и разгон синхронной машины осуществляется в асинхронном режиме. Для этого на роторе двигателя имеется обмотка конструкции “беличья клетка”. Постоянное напряжение подается на электромагниты только после разгона до номинальной частоты асинхронного режима. Синхронные двигатели имеют следующие особенности:
- Постоянная скорость вращения при переменной нагрузке.
- Высокий к.п.д. и коэффициент мощности.
- Небольшая реактивная составляющая.
- Допустимость перегрузки.
К недостаткам синхронных электродвигателей относятся:
- Высокая цена, относительно сложная конструкция.
- Сложный пуск.
- Необходимость в источнике постоянного напряжения.
- Сложность регулировки скорости вращения и момента на валу.
Все недостатки электрических машин переменного тока можно исправить установкой устройства плавного пуска или частотного преобразователя. Обоснование выбора того или иного устройства обусловлено экономической целесообразностью и требуемыми характеристиками электропривода.
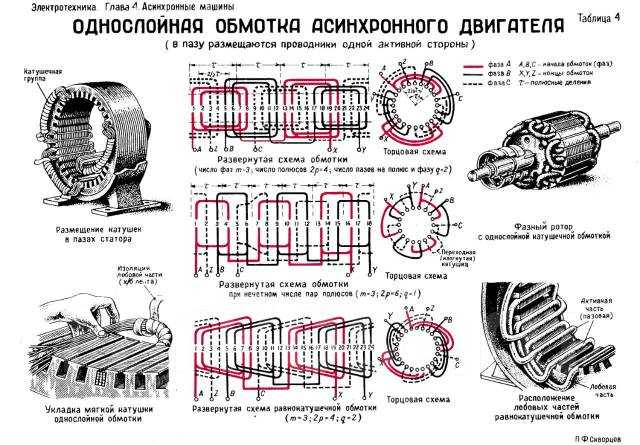
Всыпные, шаблонные, стержневые обмотки
По технологии изготовления и конструктивным особенностям также различают шаблонные, стержневые и всыпные обмотки.
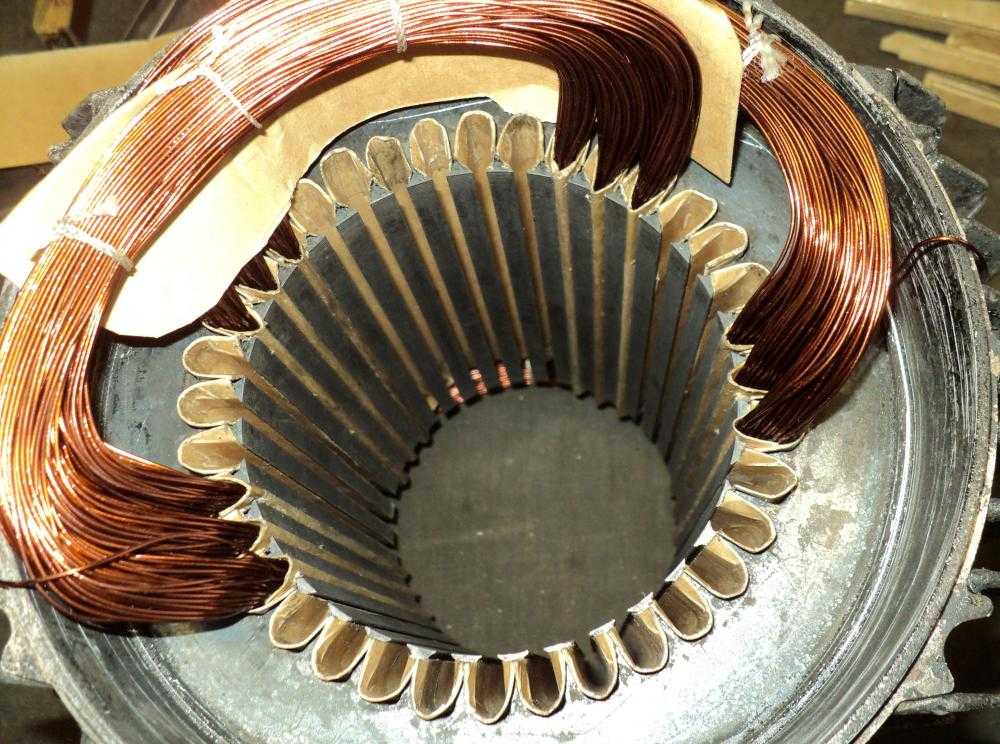
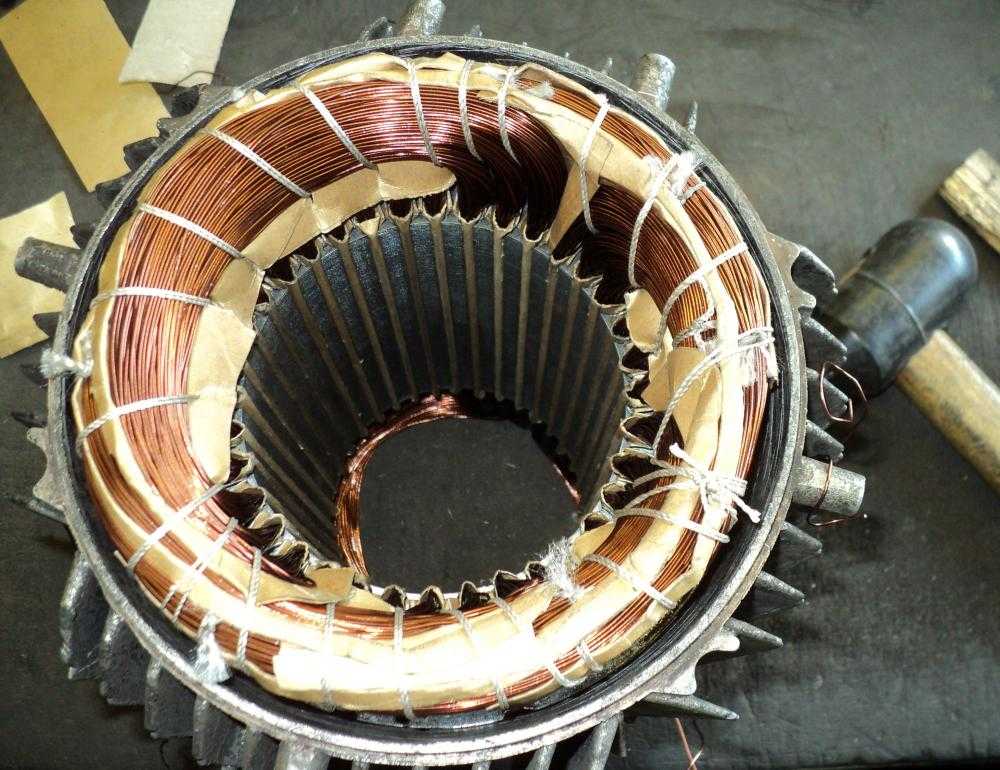
- Всыпные обмотки используются в статерах низковольтных электродвигателей; в зависимости от мощности применяются однослойные (до 7 кВт) или двухслойные (до 10 кВт) обмотки. Их использование характерно и для роторов мощностью до 100 кВт. Всыпные обмотки не имеют формы с точно установленными размерами. Такие обмотки всыпаются по одному проводнику (круглый изолированный провод) через узкие шлицы в полузакрытые пазы сердечников.
- Шаблонные, или жесткие обмотки производятся из прямоугольных или круглых проводов определенных размеров. Они формуются, при этом проводники изолируются общей изоляцией. Укладка происходит в открытые или полуоткрытые пазы. Использование данного вида обмоток характерно для статоров свыше 100 кВт и фазных роторов от 10 до 100 кВт.
- Применение стержневых обмоток характерно, в основном, для роторных машин с двигателями мощностью более 100 кВт.
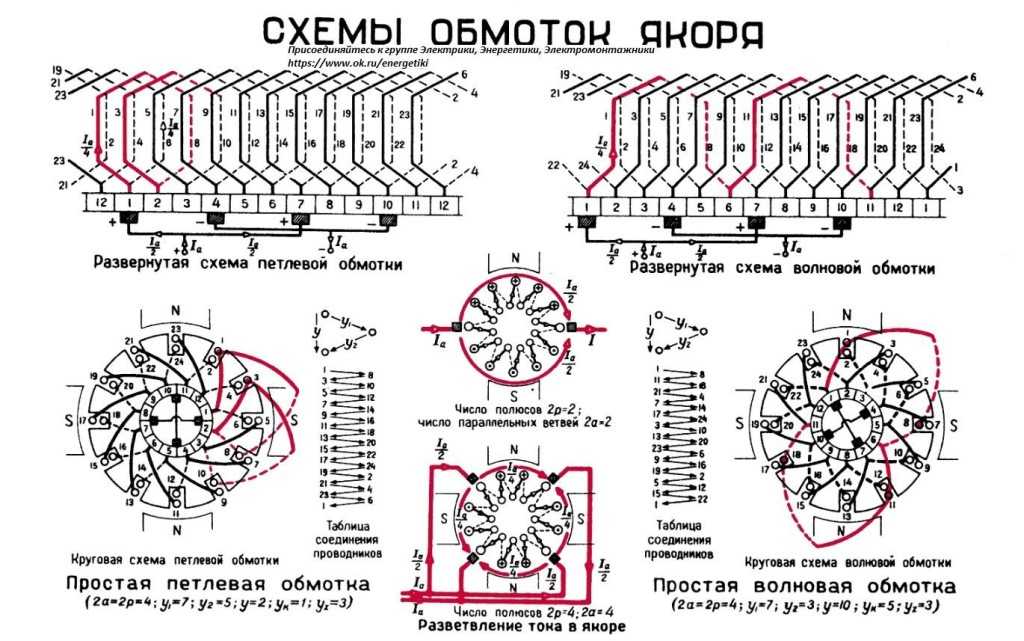
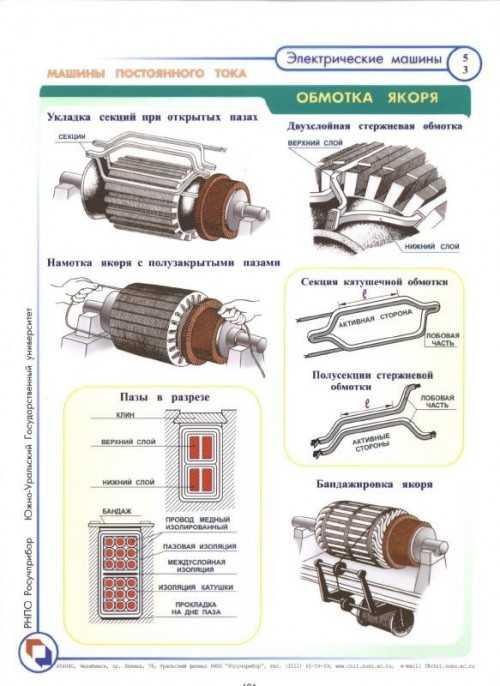
В маломощных машинах постоянного тока (до 10 кВт) используются, в основном, всыпные якорные обмотки, укладываемые в полузакрытые пазы. Для якорей более мощных двигателей применяются многовитковые или одновитковые катушки с шаблонной обмоткой, для двигателей еще большей мощности используются стержневые обмотки с высокой электрической и механической прочностью и дополнительной витковой изоляцией. В процессе перемотки трансформаторов или электродвигателей, специалисты точно определяют тип обмотки для дальнейшей надлежащей работы.
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией1 (вентильный2, 3) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители,транзисторы | Более сложнаяэлектроника | Сложная электроника (ЧП) |
Примечание:
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря .
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля .
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
Аббревиатура:
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП —
- СДПМВ —
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
Простейшие виды обмоток
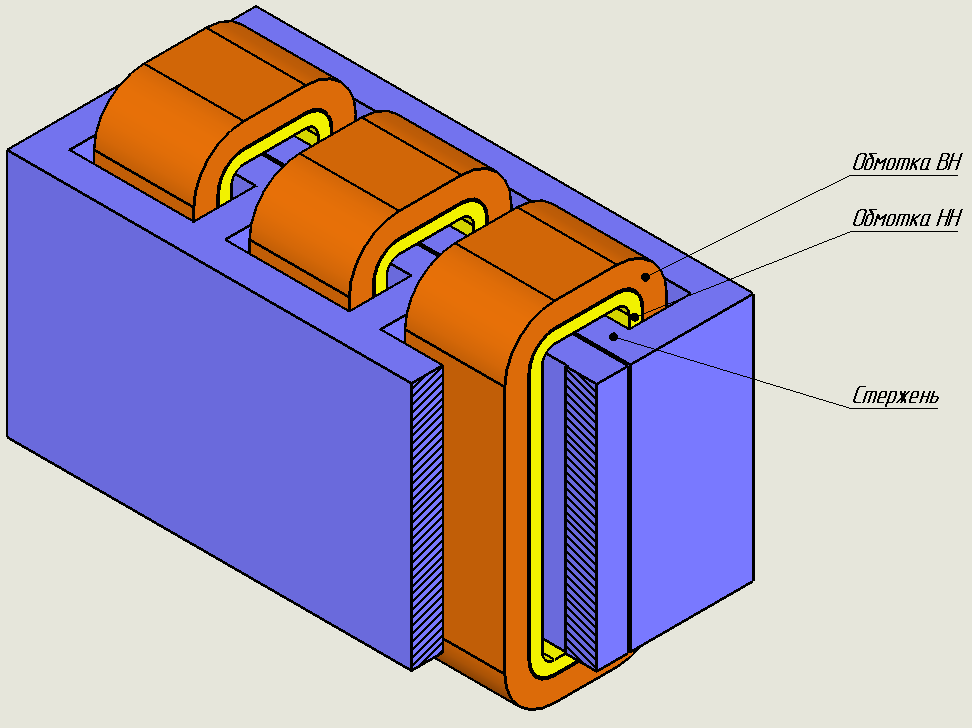
Схема броневого типа трехфазного трансформатора.
Есть три основных варианта обмоток для трансформатора. Это соединение звездой, зигзагом и треугольником. Каждая характеризуется определенными параметрами, которые выполняют свои функции
Поэтому чрезвычайно важно подобрать тип соединения правильно. Чтобы понимать, о чем идет речь, рассмотрим все три варианта более подробно
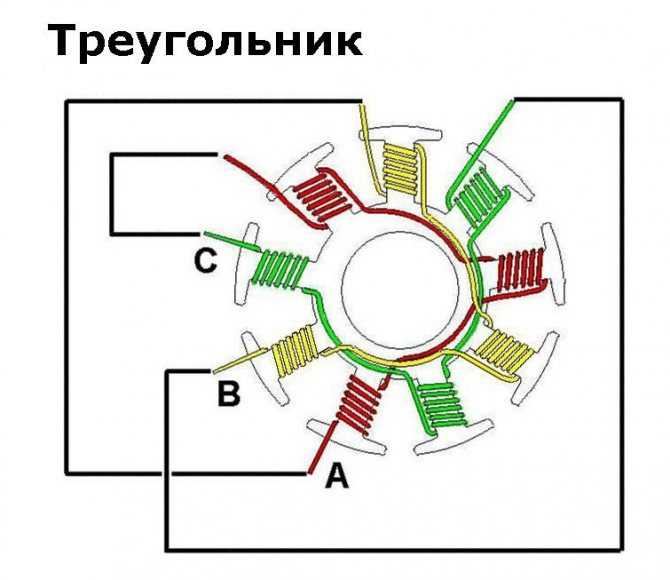
Соединение обмоток треугольником (D, d) делается в виде кольца, где все три фазы соединены последовательно. Оно является самым распространенным и востребованным на сегодняшний день. Соединение дает возможность циркулировать свободно току внутри кольца. Это так называемая третья гармоника. Если хотя бы на одной части трансформатора не будет обеспечен такой треугольник (или кольцо), то ток внутри свободно перемещаться не сможет, что очень сильно исказит напряжение.
Соединение обмоток звездой (Y, y) представляет собой наличие в единственной нейтральной точке всех концов обмотки. В итоге получается фигура, похожая на звезду, в середине которой всегда будет сохраняться нейтралитет. Оно позволяет максимально защитить прибор от перенапряжения. Также можно будет всегда создать необходимое по параметрам заземление.
Соединение обмоток трансформатора зигзагом (Z, z) в обязательном порядке должно иметь два отвода, в которых будут циркулировать токи нулевой последовательности.
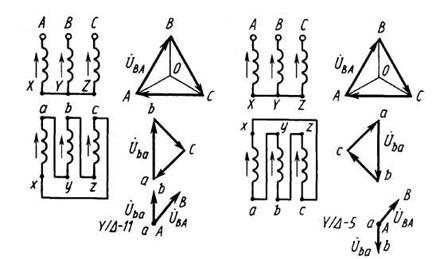
Рисунок 1. Схема соединения обмоток для трансформаторных установок вида Yd.
Так будет происходить хорошая балансировка токов и напряжений в трансформаторе. При этом сопротивление будет полностью зависеть от магнитного рассеивания между отводами зигзагом.
Итак, можно сделать вывод, что для стандартного трехфазного трансформатора могут быть комплексно использованы все три схемы. При этом для стороны с наибольшим напряжением предпочтительно выбрать соединение звездой, а остальные стороны сделать зигзагообразной и треугольной обмотками.
Основные типы однофазных индукционных электродвигателей
Бытовая техника и приборы низкой мощности работают от однофазного переменного тока, кроме того, не везде может быть обеспечено трёхфазное электропитание. Поэтому однофазные электродвигатели переменного тока получили широкое распространение, особенно в США. Очень часто электродвигателям переменного тока отдают предпочтение, так как их отличает прочная конструкция, низкая стоимость, к тому же они не требуют технического обслуживания.
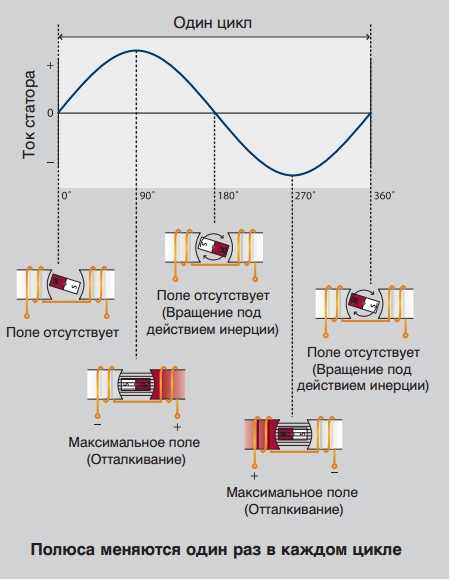
Как видно из названия, однофазный индукционный электродвигатель работает по принципу индукции; тот же принцип действует и для трёхфазных электродвигателей. Однако между ними есть различия: однофазные электродвигатели, как правило, работают при переменном токе и напряжении 110 -240 В, поле статора этих двигателей не вращается. Вместо этого каждый раз при скачке синусоидального напряжения от отрицательного к положительному меняются полюса.
В однофазных электродвигателях поле статора постоянно выравнивается в одном направлении, а полюса меняют своё положение один раз в каждом цикле. Это означает, что однофазный индукционный электродвигатель не может быть пущен самостоятельно.
Теоретически, однофазный электродвигатель можно было бы запустить при помощи механического вращения двигателя с последующим немедленным подключением питания. Однако на практике пуск всех электродвигателей осуществляется автоматически.
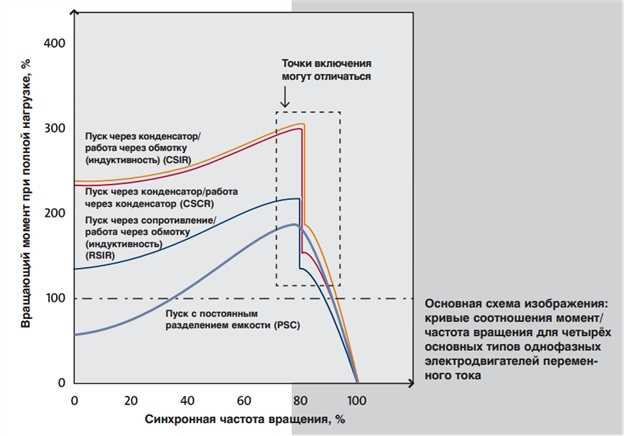
Выделяют четыре основных типа электродвигателей:
• индукционный двигатель с пуском через конденсатор / работа через обмотку (индуктивность) (CSIR),
• индукционный двигатель с пуском через конденсатор/работа через конденсатор (CSCR),
• индукционный двигатель с реостатным пуском (RSIR) и
• двигатель с постоянным разделением емкости (PSC).
На приведённом ниже рисунке показаны типичные кривые соотношения вращающий момент/частота вращения для четырёх основных типов однофазных электродвигателей переменного тока.
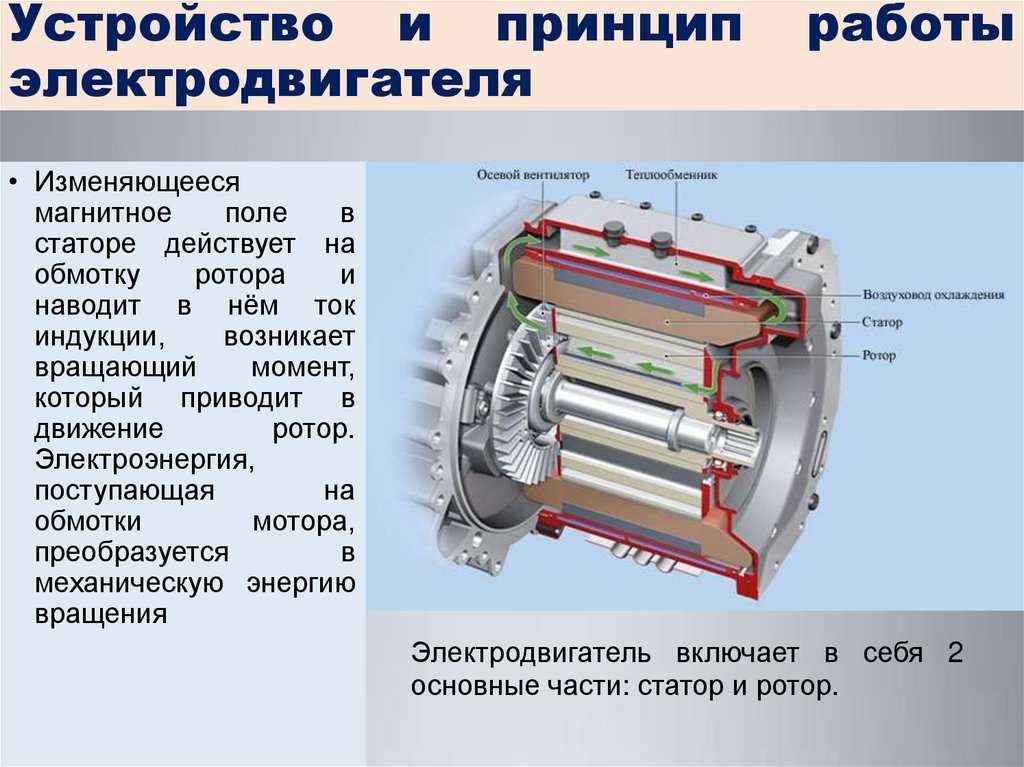
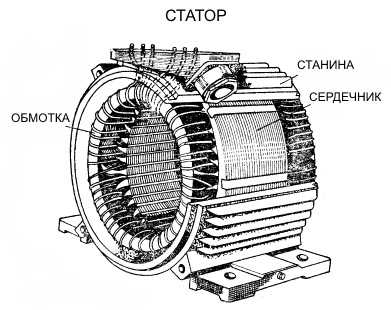
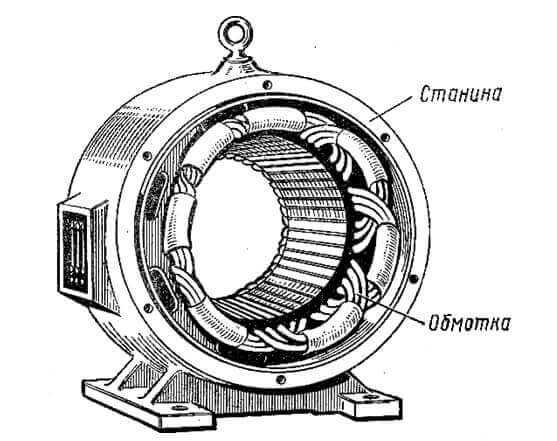
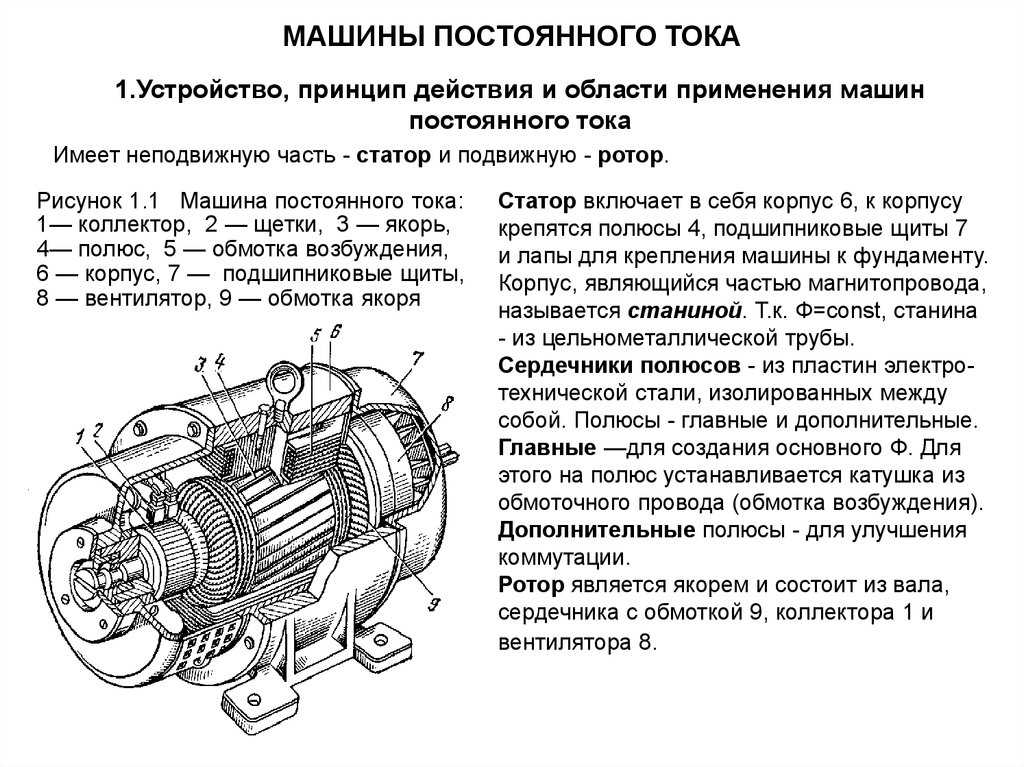
Устройство и принцип работы
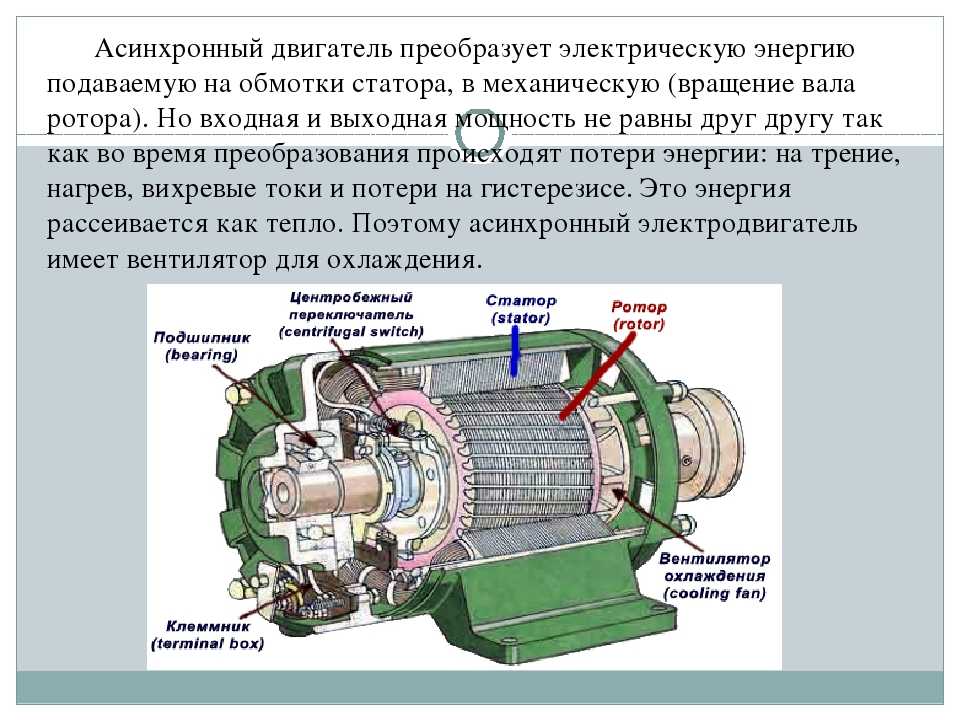
Основная движущая сила любого электрического двигателя – электромагнитная индукция. Электромагнитная индукция, если описать ее в двух словах – это появление силы тока в проводнике, помещенном в переменное магнитное поле. Источником переменного магнитного поля является неподвижный корпус двигателя с размещенными на нем обмотками – статор, подключенный к источнику переменного тока. В нем расположен подвижный элемент – ротор, в котором и возникает ток. По закону Ампера на заряженный проводник, помещенный в магнитное поле, начинает действовать электродвижущая сила – ЭДС, которая вращает вал ротора. Таким образом, электрическая энергия, которая подается на статор, превращается в механическую энергию ротора. К вращающемуся валу можно подключать различные механизмы, выполняющие полезную работу.
Электродвигатели переменного тока делятся на синхронные и асинхронные. Разница между ними в том, что в первых ротор и магнитное поле статора вращаются с одной скоростью, а во вторых ротор вращается медленнее, чем магнитное поле. Отличаются они и по устройству, и по принципу работы.
Асинхронный двигатель
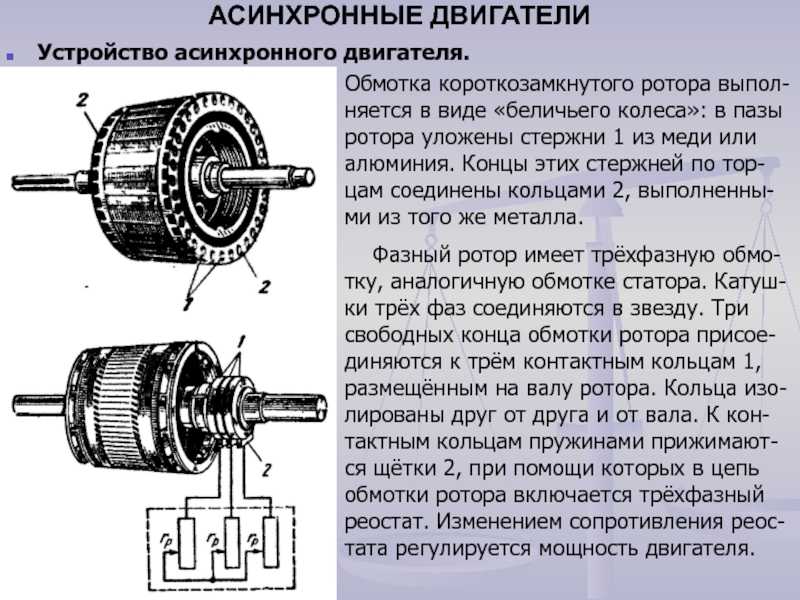
Устройство асинхронного двигателя
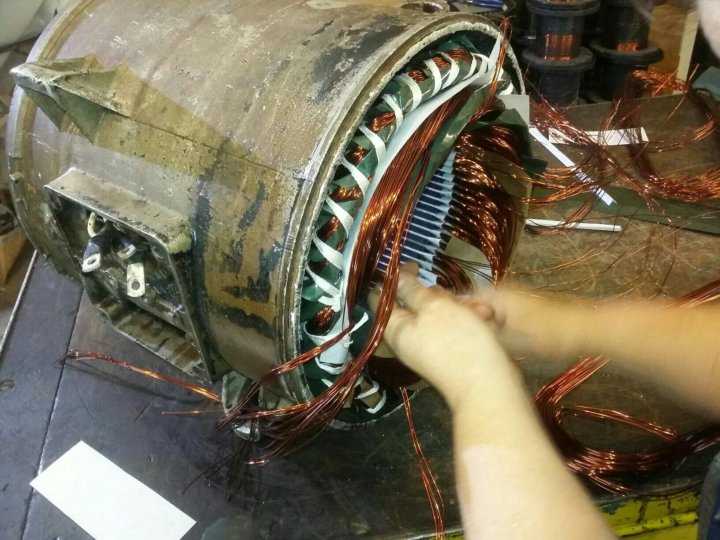
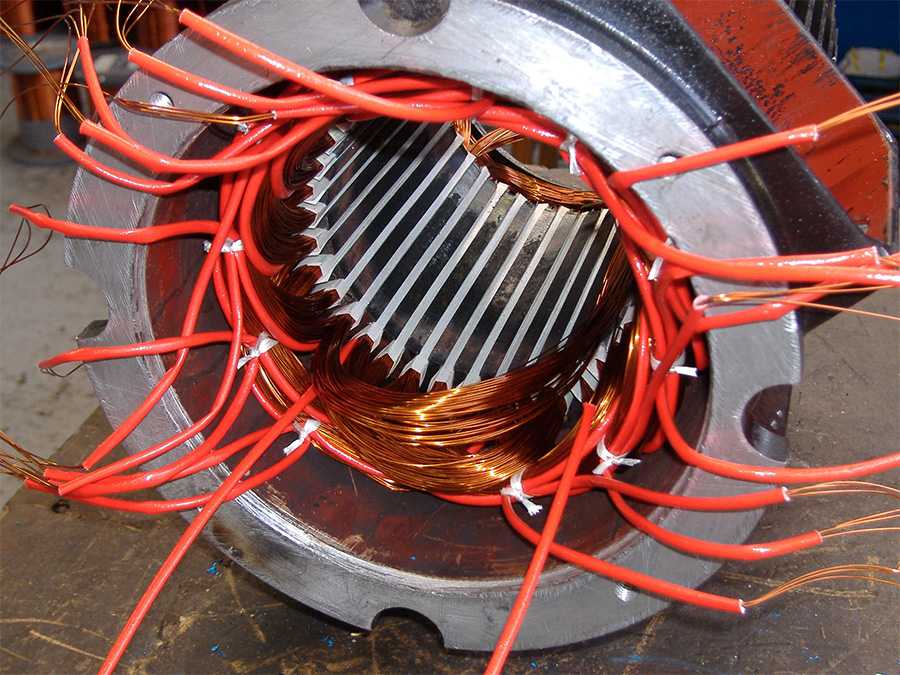
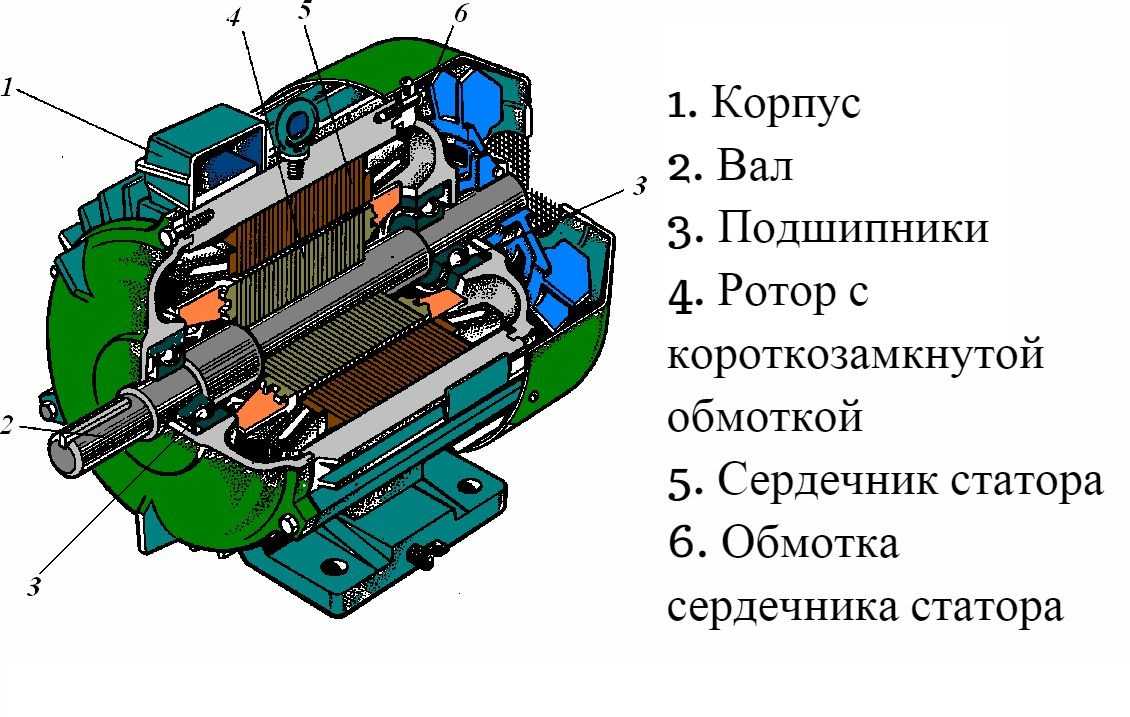
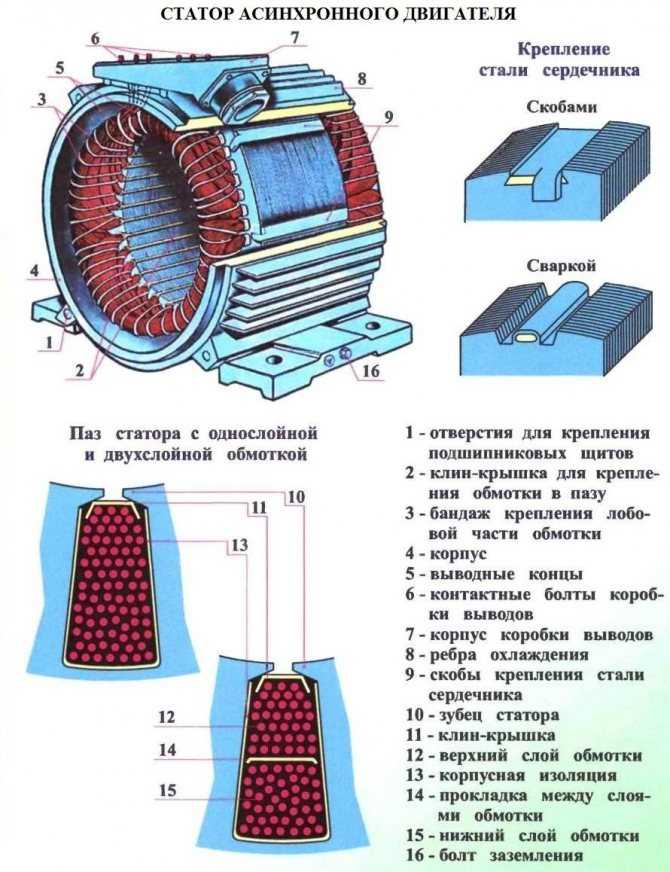
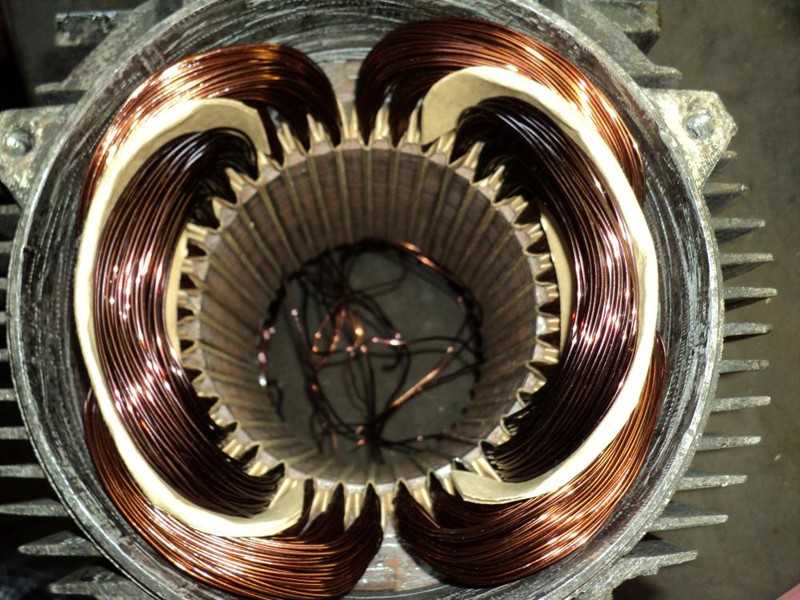
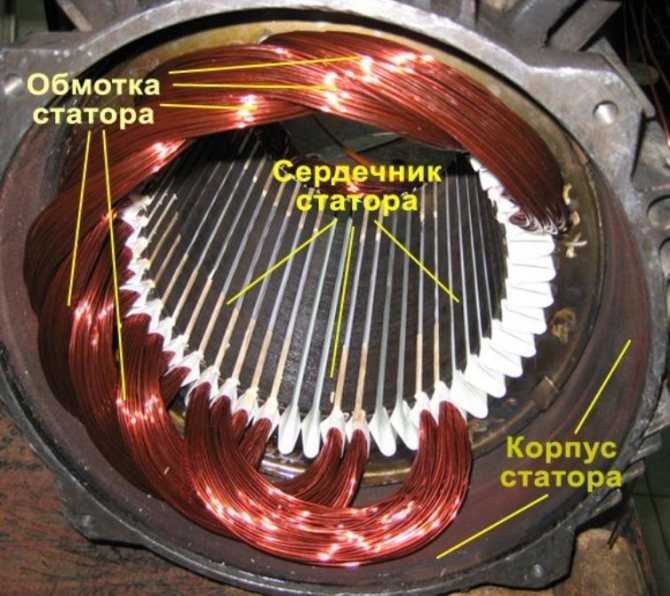
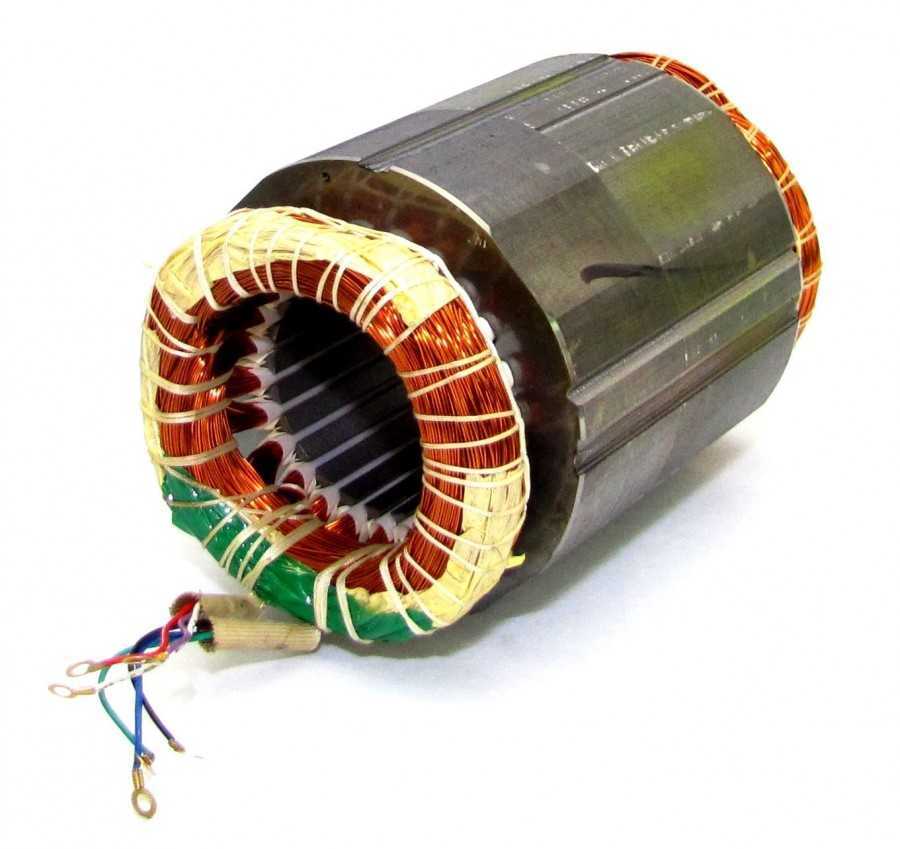
На статоре асинхронного двигателя закреплены обмотки, создающие переменное вращающееся магнитное поле, концы которой выводятся на клеммную коробку. Поскольку при работе двигатель нагревается, на его валу устанавливается вентилятор системы охлаждения.
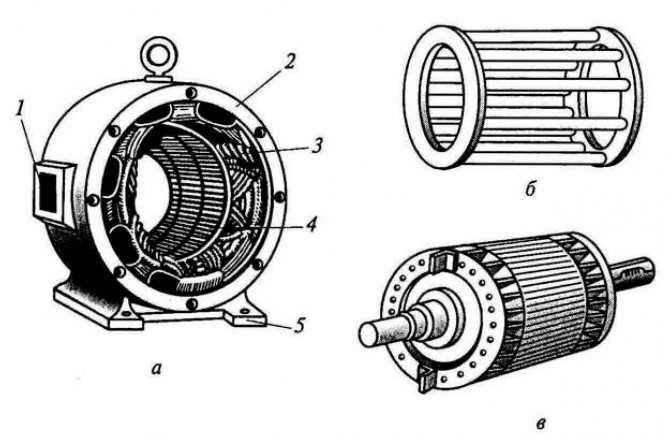
Ротор асинхронного двигателя выполнен с валом как одно целое. Он представляет собой металлические стержни, замкнутые между собой с двух сторон, из-за чего такой ротор еще именуется короткозамкнутым. Своим видом он напоминает клетку, поэтому его часто называют «беличьим колесом» Более медленное вращение ротора в сравнении с вращением магнитного поля – результат потери мощности при трении подшипников. Кстати, если бы не было этой разницы в скорости, ЭДС бы не возникала, а без нее не было бы и тока в роторе и самого вращения.







Магнитное поле вращается за счет постоянной смены полюсов. При этом соответственно меняется направление тока в обмотках. Скорость вращения вала асинхронного двигателя зависит от числа полюсов магнитного поля.
Синхронный двигатель
Устройство синхронного двигателя
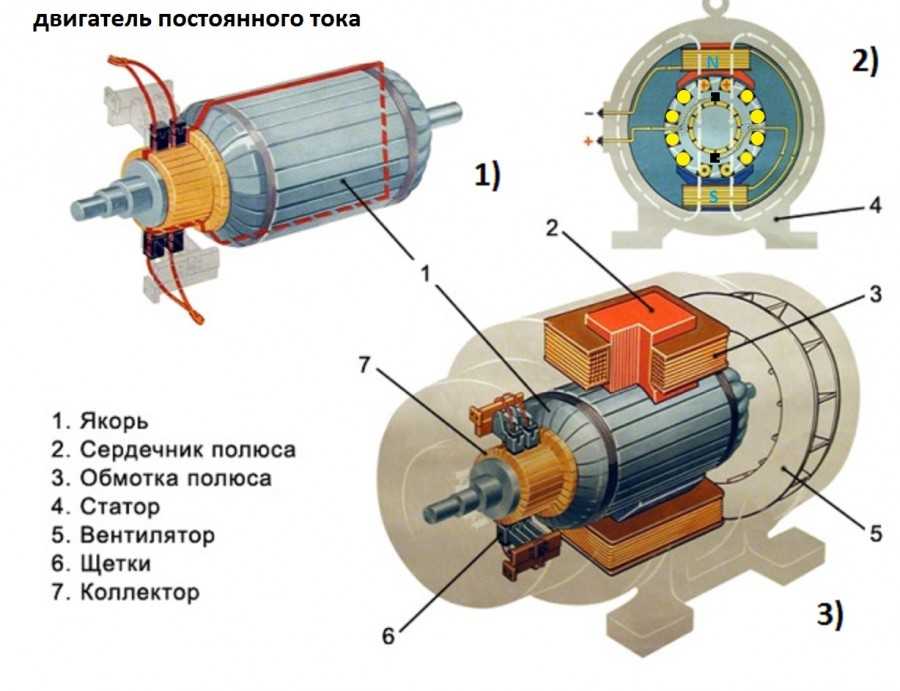
Устройство синхронного электродвигателя немного отличается. Как понятно из названия, в этом двигателе ротор вращается с одной скоростью с магнитным полем. Он состоит из корпуса с закрепленными на нем обмотками и ротора или якоря, снабженного такими же обмотками. Концы обмоток выводятся и закрепляются на коллекторе. На коллектор или токосъемное кольцо подается напряжение посредством графитовых щеток. При этом концы обмоток размещены таким образом, что одновременно напряжение может подаваться только на одну пару.
В отличие от асинхронных на ротор синхронных двигателей напряжение подается щетками, заряжая его обмотки, а не индуцируется переменным магнитным полем. Направление тока в обмотках ротора меняется параллельно с изменением направления магнитного поля, поэтому выходной вал всегда вращается в одну сторону. Синхронные электродвигатели позволяют регулировать скорость вращения вала путем изменения значения напряжения. На практике для этого обычно используются реостаты.
В чём отличие трёхфазных двигателей
Принцип работы трёхфазного двигателя не отличается от двухфазного, однако разницу можно заметить в конструкции. Вместо двух магнитных потоков их три, при этом они смещены относительно друг друга в пространстве и времени, что позволяет создать магнитный поток, вращающийся в нужном направлении и с нужной скоростью.
Стоит отметить, что при вращении поток создаёт ЭДС в роторных проводниках. В результате ротор продолжает вращаться даже в том случае, если пусковой момент превышает тормозной. Это явление получило название скольжения, который является если не ключевым, то очень важным параметром для двигателя. Именно от него зависит безопасность работы, поскольку достижение критического уровня скольжения снижает стабильность, и двигатель может пострадать от опрокидывания.
Таким образом, принцип асинхронного трёхфазного двигателя строится на взаимодействии ротора, создающего магнитное поле, и токов, которые присутствуют в данном поле. При этом без разницы частот вращения полей движение не начнётся. В широком применении униполярные трёхфазные двигатели применяются в циркулярке.
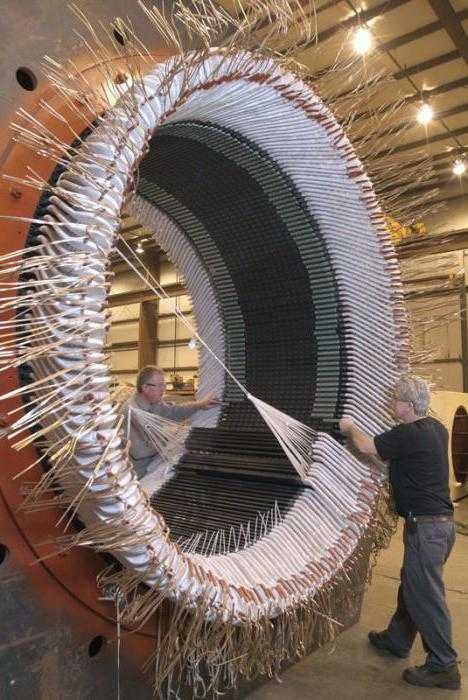
Всыпные, шаблонные, стержневые обмотки
По технологии изготовления и конструктивным особенностям также различают шаблонные, стержневые и всыпные обмотки.
- Всыпные обмотки используются в статерах низковольтных электродвигателей; в зависимости от мощности применяются однослойные (до 7 кВт) или двухслойные (до 10 кВт) обмотки. Их использование характерно и для роторов мощностью до 100 кВт. Всыпные обмотки не имеют формы с точно установленными размерами. Такие обмотки всыпаются по одному проводнику (круглый изолированный провод) через узкие шлицы в полузакрытые пазы сердечников.
- Шаблонные, или жесткие обмотки производятся из прямоугольных или круглых проводов определенных размеров. Они формуются, при этом проводники изолируются общей изоляцией. Укладка происходит в открытые или полуоткрытые пазы. Использование данного вида обмоток характерно для статоров свыше 100 кВт и фазных роторов от 10 до 100 кВт.
- Применение стержневых обмоток характерно, в основном, для роторных машин с двигателями мощностью более 100 кВт.
В маломощных машинах постоянного тока (до 10 кВт) используются, в основном, всыпные якорные обмотки, укладываемые в полузакрытые пазы. Для якорей более мощных двигателей применяются многовитковые или одновитковые катушки с шаблонной обмоткой, для двигателей еще большей мощности используются стержневые обмотки с высокой электрической и механической прочностью и дополнительной витковой изоляцией. В процессе перемотки трансформаторов или электродвигателей, специалисты точно определяют тип обмотки для дальнейшей надлежащей работы.
Источник
Скольжение S
Параметр скольжения есть во всех асинхронных силовых агрегатах. Возникает данное явление из-за разницы в частоте вращения магнитного поля статора и ротора. Индуцируемая в стержнях ЭДС может появляться только при их движении относительно магнитного поля. Ротор при этом немного отстает.
Если скорости вращения одинаковы, в стержнях клетки не индуцируется ток, что делает невозможным дальнейшее движение. Поэтому в любом исполнении и рабочей нагрузке ротор движется с немного меньшей скоростью, чем магнитное поле.
Измерение скольжения производится в процентах. На холостом ходу данный показатель стремится к 0. При застопоренном роторе (КЗ) параметр равен 1. В асинхронной системе с короткозамкнутым ротором параметр скольжения зависит от нагрузки.
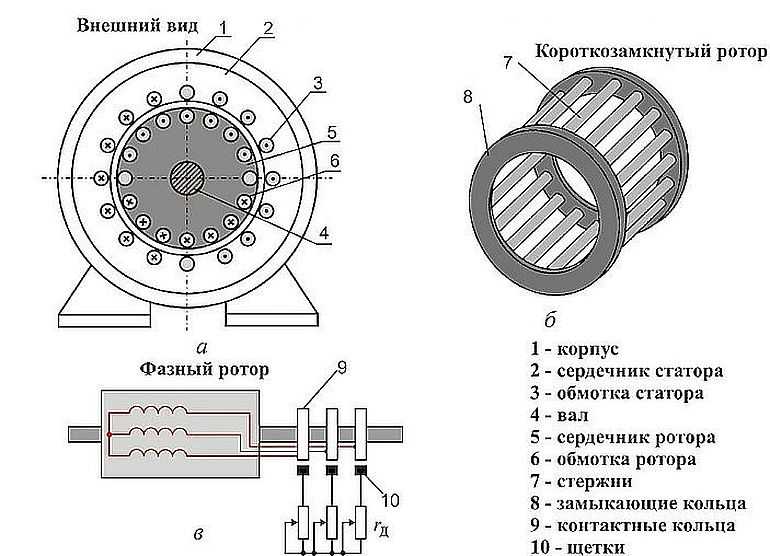
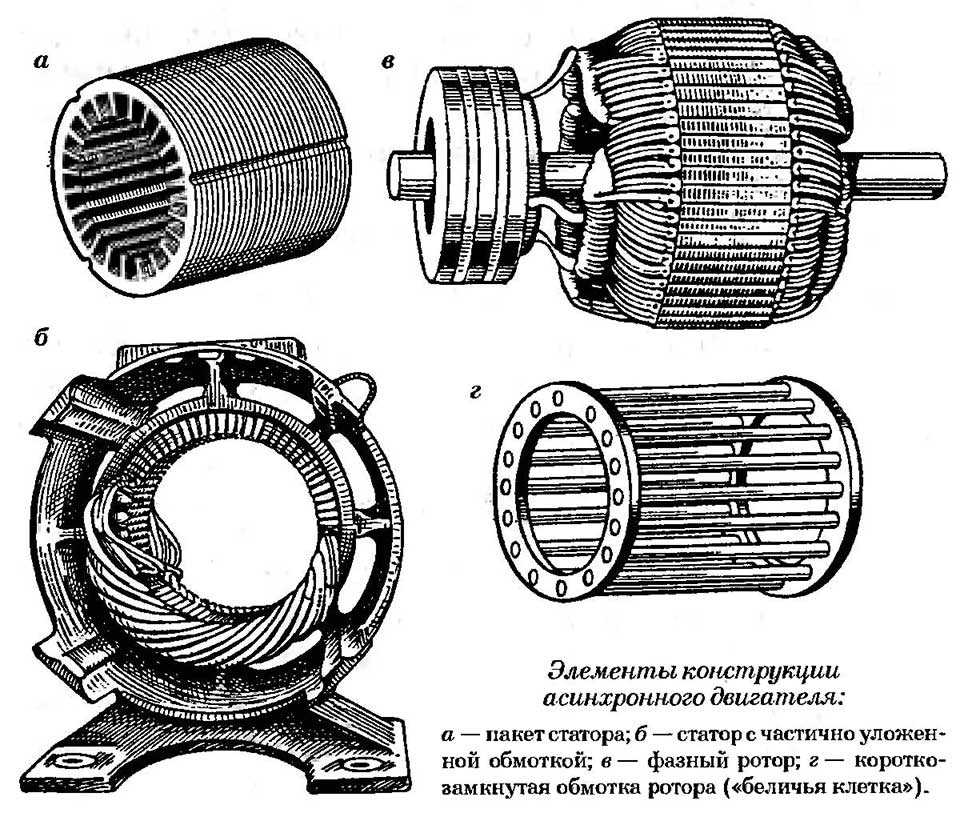
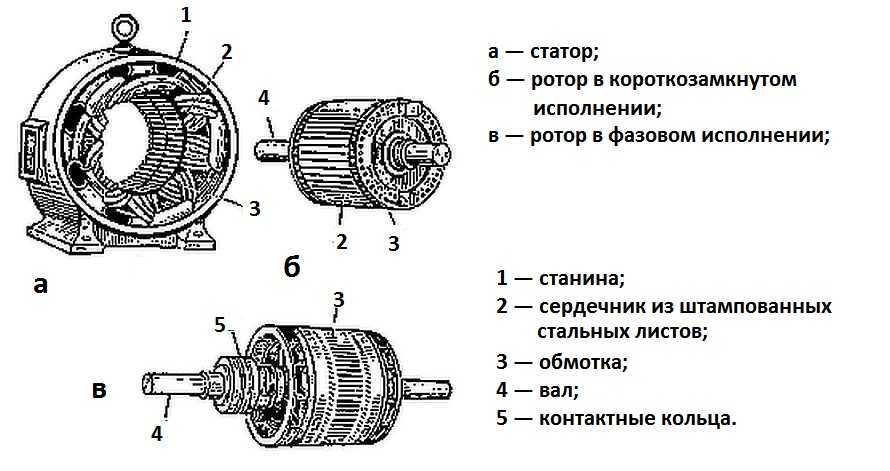
Различия между короткозамкнутым и фазным ротором
Система такого мотора построена на основе трех обмоток статора, формирующих разное количество магнитных полюсов (в зависимости от конструкции, выбранной в процессе проектирования). Объем полюсов на обмотках оказывает влияние на номинальный режим работы. Роторная система же может быть выполнена в 2 вариантах – короткозамкнутом и фазном.
Короткозамкнутый ротор
При помещении в движущееся магнитное поле статора, замкнутый виток проводника начнет индуцировать ЭДС, вследствие чего будет вырабатываться ток. Из-за этого замкнутый контур начинает подвергаться воздействию сил Ампера, поворачиваясь в том же направлении, что и у магнитных полей статора.
В этом заключается основной принцип работы короткозамкнутого электродвигателя. Вместо замкнутого контура в конструкции применяется набор стержней из меди или алюминия, замкнутых накоротко кольцами. Переменное напряжение при прохождении по статорным обмоткам создает вращающееся магнитное поле. На замкнутых контурах роторной конструкции появляется ток, и вся система приходит в движение. Вращение происходит за счет разной величины индуцируемого тока на парах стержней, что постоянно меняется в зависимости от расположения парных элементов относительно магнитного поля.





Для устранения пульсации и сохранения постоянности крутящего момента стержни «беличьей клетки» располагаются не параллельно валу. Небольшой наклон также снижает действие высших гармоник при работе электродвигателя.
Фазный ротор

Асинхронные модели с фазным ротором конструктивно имеют полноценную обмотку. В роторной конструкции предусмотрены специальные пазы, в которых укладываются провода. Выводы от обмотки подключены к контактным кольцам, которые расположены на валу. При этом поверхности данных элементов изолированы друг от друга и от вала. Конструкция обмотки составлена 3 частями, каждая из которых отвечает за отдельную фазу. Наиболее распространенным способом подключения является звезда. Фазные системы более сложны, чем короткозамкнутые и имеют большую себестоимость. Однако они предоставляют больше возможностей по регулировке рабочего момента на валу.
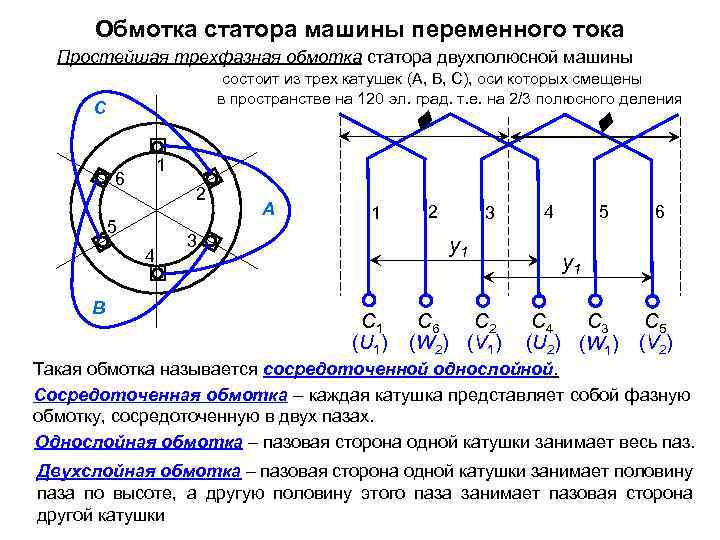
Статорная обмотка в фазном электродвигателе представляет собой аналог ротора на короткозамкнутой конструкции. Она создает разное количество парных полюсов, объем которых зависит от набора катушек, сдвинутых относительно друг друга на определенную величину (120о, 60о, 40о и т.д.). Регулировка рабочего момента осуществляется посредством управления напряжением на обмотках.
Асинхронные электродвигатели
Благодаря дешевизне и простоте конструкции электрические машины такого типа получили самое широкое распространение. Их принципиальное отличие – наличие так называемого скольжения. Это разность между частотой вращения магнитного поля неподвижной части электрической машины и скоростью вращение ротора. Напряжение на вращающейся части индуцируется за счет переменного магнитного поля обмоток статора двигателя. Вращение вызывает взаимодействие поля электромагнитов неподвижной части и магнитного поля ротора, возникающего под влиянием наведенных в нем вихревых токов. По особенностям обмоток статора выделяют:
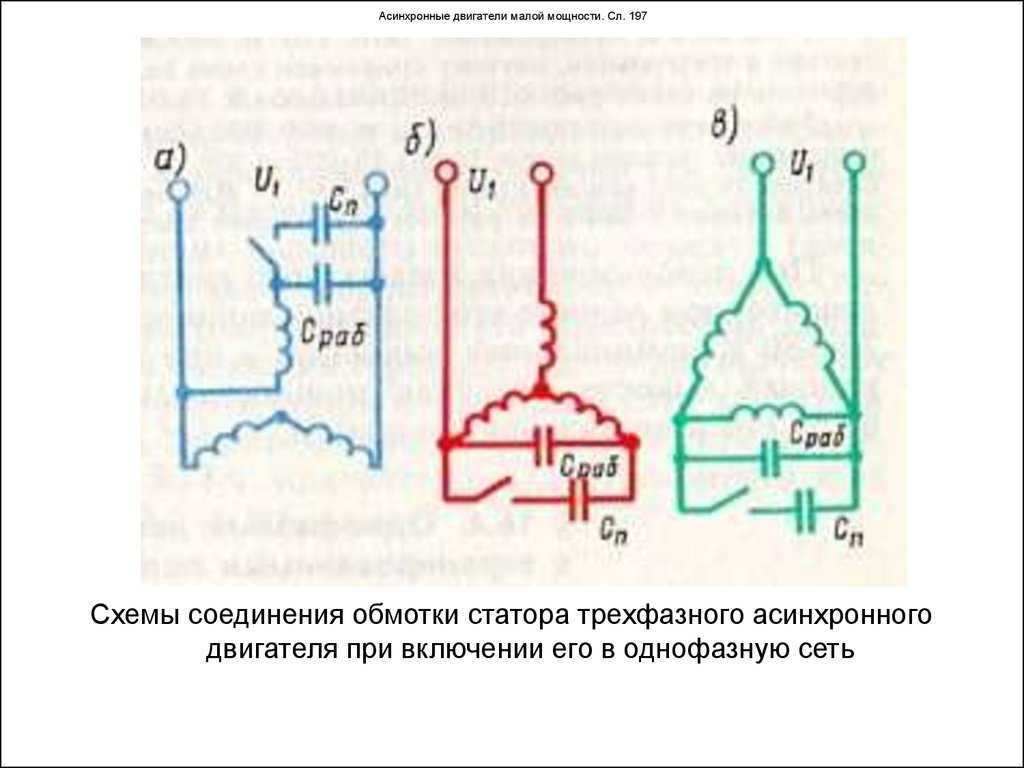
- Однофазные двигатели переменного тока. Двигатели такого типа требуют для пуска наличия внешнего фазосдвигающего элемента. Это может быть пусковой конденсатор или индуктивное устройство. Область применения однофазных двигателей – маломощные приводы.
- Двухфазные электрические машины. Такие двигатели имеют 2 обмотки со смещенными относительно друг друга фазами. Их также используют для бытовых устройств и оборудования, имеющего небольшую мощность.
- Трех- и многофазные электродвигатели. Наиболее распространенный тип асинхронных машин. Электрические двигатели такого типа имеют от 3-х и более обмоток статора, сдвинутых по фазе на определенный угол.
По конструкции ротора асинхронные электрические машины делят на двигатели с короткозамкнутым и фазным ротором.
Обмотка ротора электрических машин первого типа представляет собой несколько неизолированных стержней, выполненных из сплавов меди или алюминия, замкнутых с двух сторон кольцами (конструкция “беличья клетка”). Асинхронные двигатели такого типа обладают следующими преимуществами:
- Достаточно простая схема пуска. Такие электрические машины можно подключать непосредственно к электрической сети через аппараты коммутации.
- Допустимость кратковременных перегрузок.
- Возможность изготавливать электрические машины высокой мощности. Двигатель такого типа не содержит скользящих контактов, препятствующих наращиванию мощности.
- Относительно простое ТО и ремонт. Асинхронные электромашины имеют несложную конструкцию.
- Невысокая цена. Двигатели асинхронного типа стоят дешевле синхронных машин и ДПТ.

Электрические машины с короткозамкнутым ротором имеют свои недостатки:
- Предельная скорость вращения составляет не более 3000 об/мин при входе в синхронный режим.
- Технически сложная реализация регулирования частоты вращения.
- Высокие пусковые токи при прямом запуске.
Электродвигатели с фазным ротором частично лишены недостатков, присущих машинам с ротором конструкции “беличья клетка”. Вращающаяся часть электрической машины такого типа имеет обмотки, соединенные в схему “звезда”. Напряжение подводится к обмотке через 3 контактных кольца, закрепленных на роторе и изолированных от него.
Такие электродвигатели обладают следующими достоинствами:
- Возможность ограничивать пусковые токи при помощи резистора, включенного в цепь электромагнитов ротора.
- Больший, чем у электромашин с короткозамкнутым ротором, пусковой момент.
- Возможность регулировки скорости.

Недостатками таких двигателей являются относительно большие габариты и масса, высокая цена, более сложный ремонт и сервисное обслуживание.
Двигатели, применяемые в промышленности
В промышленности успешно применяются оба типа двигателей: и асинхронные с короткозамкнутым ротором, и синхронные коллекторные.
Первый тип устройств имеет важные достоинства:
- Низкая цена;
- Надежность и долговечность;
- Простота эксплуатации.
Имеются и минусы:
- Невозможность плавного регулирования оборотов якоря;
- Невысокая скорость вращения – предел 3000 об./мин. в сетях с частотой 50Гц;
- Большие пусковые токи.
Однако достоинства этих изделий многократно превосходят их недостатки.
К сведению. Асинхронные двигатели применяются в тех устройствах, где требуются постоянные режимы работы промышленного или транспортного оборудования. Например, в приводах всевозможных насосов, ленточных транспортеров, в системах вентиляции, в подъемных механизмах. Ниша асинхронных электрических машин занимает 65-75 % от общего объема применяемых электромоторов.




Синхронные, коллекторные двигатели имеют свои достоинства:
- Возможность плавного бесступенчатого изменения скорости вращения;
- Большая мощность;
- Большая скорость вращения.
Недостатки, присущие коллекторным электромоторам:
- Относительно высокая стоимость;
- Скользящие контакты коллектора якоря, снижающие надежность эксплуатации и уменьшающие ресурс машины;
- Необходимость частого обслуживания.
Они применяются там, где необходимо плавное изменение угловых скоростей: это приводы станков, тяговые моторы электротранспорта, точные системы монтажа.
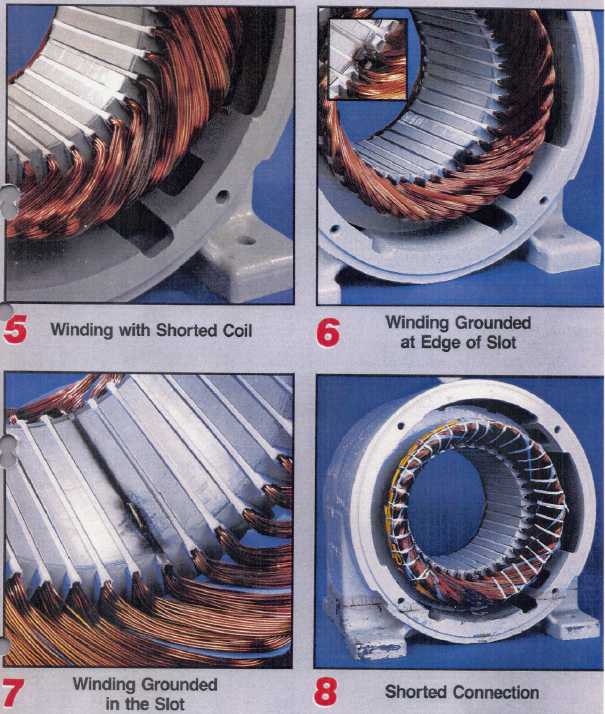
Оба типа двигателей находят массовое применение в промышленности и быту. Для их длительной и безотказной работы необходимо проведение регламентных работ, при необходимости и восстановительного ремонта, включающего перемотку обмоток статора и ротора.
Стоит ли выполнять перемотку самостоятельно?
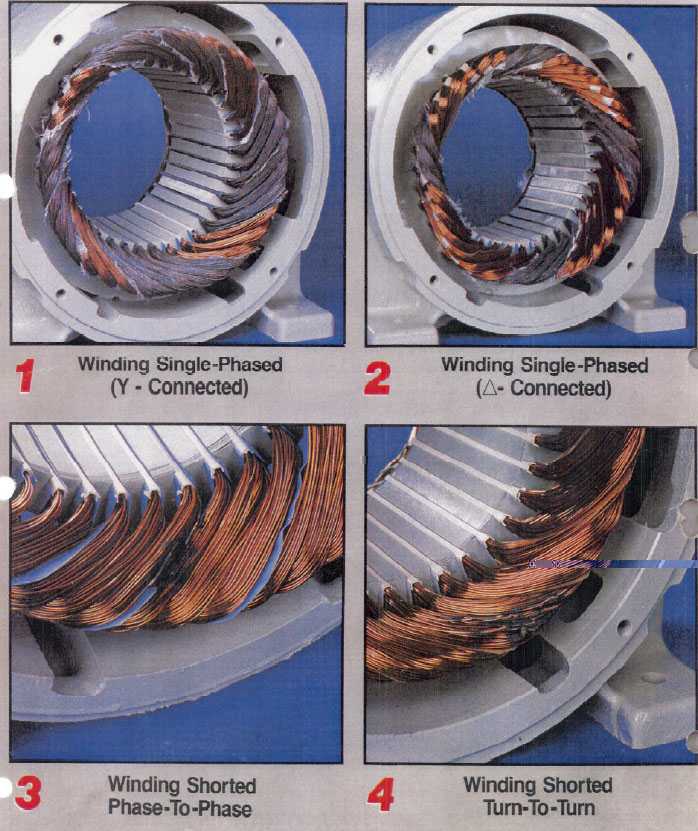
Ремонтируя статор асинхронного электродвигателя, который чаще всего сегодня применяется в бытовой и промышленной технике, недостаточно опытный мастер может столкнуться с рядом трудностей. В этом случае он может обратиться в сервисные службы, где специалисты за отдельную плату выполнят перемотку в соответствии со всеми правилами.
Обратиться к профессионалам следует в том случае, если у мастера нет даже минимального опыта в проведении ремонтных работ электродвигателя. Если нет достаточного количества времени и желания производить подобную процедуру самостоятельно, также следует доверить перемотку специалистам. В этом случае затраты будут определяться на основе мощности двигателя и количества его оборотов в минуту.
Перемотка электродвигателей, цена которой сегодня установлена сервисными центрами, обойдется около 2-4 тыс. руб. Однако для более мощных двигателей расценки значительно увеличиваются. Процедура может достигать 135 тыс. руб. за перемотку больших промышленных двигателей.
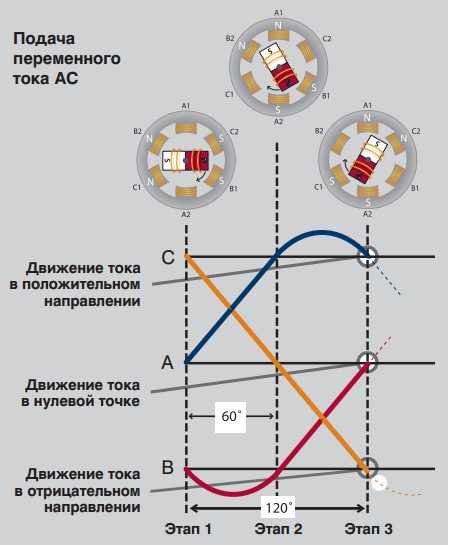
Чередование полюсов с помощью переменного тока
Чередование полюсов с помощью переменного тока
Полярность постоянно меняется с помощью переменного тока (AC). Далее мы увидим, как ротор заменяется магнитом, который вращается под действием индукции. Здесь важную роль играет переменный ток, поэтому будет полезно привести здесь краткую информацию о нём:
Переменный ток — AC
Под переменным током понимается электрический ток, периодически изменяющий свое направление в цепи так, что среднее значение силы тока за период равно нулю. Вращающееся магнитное поле можно создать с помощью трёхфазного питания. Это означает, что статор подсоединяется к источнику переменного тока с тремя фазами. Полный цикл определяется как цикл в 360 градусов. Это значит, что каждая фаза расположена по отношению к другой под углом в 120 градусов. Фазы изображаются в виде синусоидальных кривых, как представлено на рисунке.
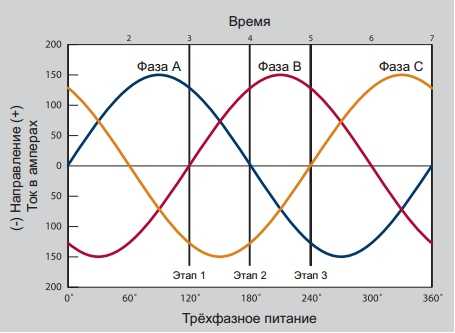
Трёхфазный переменный ток
Трёхфазное питание — это непрерывный ряд перекрывающихся напряжений переменного тока (AC).
Смена полюсов
На следующих страницах объясняется, как взаимодействуют ротор и статор, заставляя электродвигатель вращаться.

Для наглядности мы заменили ротор вращающимся магнитом, а статор — катушками. В правой части страницы приведено изображение двухполюсного трёхфазного электродвигателя. Фазы соединены парами: 1-й фазе соответствуют катушки A1 и A2, 2-й фазе — B1 и B2 , а 3-й соответствуют C1 и C2. При подаче тока на катушки статора одна из них становится северным полюсом, другая — южным. Таким образом, если A1 — северный полюс, то A2 — южный.




Питание в сети переменного тока
Обмотки фаз A, B и C расположены по отношению друг к другу под углом в 120 градусов.

Количество полюсов электродвигателя определяется количеством пересечений поля обмотки полем ротора. В данном случае каждая обмотка пересекается дважды, что означает, что перед нами двухполюсный статор. Таким образом, если бы каждая обмотка появлялась четыре раза, это был бы четырехполюсный статор и т.д.
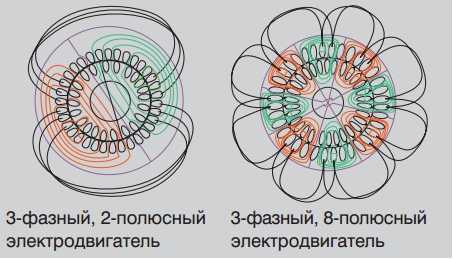
Когда на обмотки фаз подаётся электрический ток, вал электродвигателя начинает вращаться со скоростью, обусловленной числом полюсов (чем меньше полюсов, тем ниже скорость)
Вращение ротора
Ниже рассказывается о физическом принципе работы электродвигателя (как ротор вращается внутри статора). Для наглядности, заменим ротор магнитом. Все изменения в магнитном поле происходят очень быстро, поэтому нам необходимо разбить весь процесс на этапы. При прохождении трёхфазного переменного тока по обмоткам статора в нем создается магнитное поле, в результате чего возникают механические усилия, заставляющие ротор вращаться в сторону вращения магнитного поля.
Начав вращение, магнит будет следовать за меняющимся магнитным полем статора. Поле статора меняется таким образом, чтобы поддерживалось вращение в одном направлении.
Какой должна быть намотка
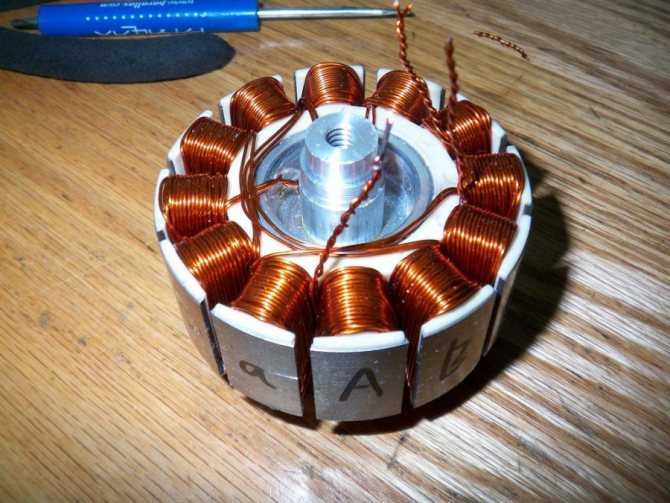
Обмотка – это кусок проводника, зафиксированный кольцами в корпусе двигателя. Ее установка требует соблюдения ряда условий:
- Проволока однородная на всем покрываемом участке;
- Форма и площадь сечения проводника соответствуют друг другу;
- Поверх наносится слой изоляции (лака);
- Соединение должно обеспечивать надежный контакт.
В большинстве случаев схема соединения обмоток двигателя представлена в виде звезды или треугольника, однако существуют и другие варианты. Концы проводников подключают на специальные внешние колодки с клеммами, редко соединения наблюдаются внутри корпуса.