
Краткая история создания
Первопроходцем в истории создания электрических двигателей стал М.Фарадей. Создать полноценную рабочую модель он не смог, зато именно ему принадлежит открытие, которое сделало это возможным. В 1821 году он провел опыт с использованием заряженной проволоки, помещенной в ртуть в ванную с магнитом. При взаимодействии с магнитным полем металлический проводник начинал вращаться, превращаю энергию электрического тока в механическую работу. Ученые того времени работали над созданием машины, работа которой основывалась бы на этом эффекте. Они хотели получить двигатель, работающий по принципу поршневого, то есть, чтобы рабочий вал двигался возвратно-поступательно.
В 1834 году был создан первый электрический двигатель постоянного тока, который разработал и создал русский ученый Б.С.Якоби. Именно он предложил заменить возвратно-поступательное движение вала его вращением. В его модели два электромагнита взаимодействовали между собой, вращая вал. В 1839 году он же успешно испытал лодку, оснащенную ДПТ. Дальнейшая история этого силового агрегата, по сути – это совершенствование двигателя Якоби.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
Способы возбуждения машин постоянного тока и их классификация
Ток, протекающий в обмотке возбуждения основных полюсов, создает магнитный поток . Электрические машины постоянного тока следует различать по способу возбуждения и схеме включения обмотки возбуждения. Генераторы постоянного тока могут выполняться с независимым, параллельным, последовательным и смешанным возбуждением. Следует заметить, что теперь применение в качестве источников энергии генераторов постоянного тока очень ограничено.
Обмотка возбуждения генератора постоянного тока с независимым возбуждением получает питание от независимого источника — сети постоянного тока, специального возбудителя , преобразователя и др. (рис. 1, а). Эти генераторы применяются в мощных системах, когда напряжение возбуждения должно быть выбрано отличным от напряжения генератора, в системах регулирования скорости вращения двигателей, которые питаются от генераторов и других источников.
Значение тока возбуждения мощных генераторов составляет 1,0—1,5% от тока генераторов и до десятков процентов для машин мощностью порядка десятков ватт.
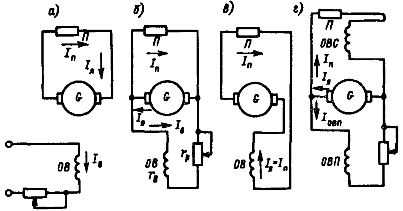
Рис. 1. Схемы генераторов постоянного тока: а — с независимым возбуждением; б — с параллельным возбуждением; в — с последовательным возбуждением; г — со смешанным возбуждением П — потребители
У г енератора с параллельным возбуждением обмотка возбуждения включается на напряжение самого генератора (смотрите рис. 1,б). Ток якоря I я равен сумме токов нагрузки I п и тока возбуждения I в: I я = I п + I в
Генераторы выполняются обычно для средних мощностей.
Обмотка возбуждения генератора с последовательным возбуждением включена последовательно в цепь якоря и обтекается током якоря (рис. 1, в). Процесс самовозбуждения генератора протекает очень бурно. Такие генераторы практически не используются. В самом начале развития энергетики применялась система передачи энергии с последовательно включенными генераторами и двигателями последовательного возбуждения.
Генератор со смешанным возбуждением имеет две обмотки возбуждения — параллельную ОВП и последовательную ОВС обычно с согласным включением (рис. 1, г). Параллельная обмотка может быть включена до последовательной («короткий шунт») или после нее («длинный шунт»). МДС последовательной обмотки обычно невелика и рассчитана только на компенсацию падения напряжения в якоре при нагрузке. Такие генераторы теперь также практически не применяются.
Схемы возбуждения двигателей постоянного тока подобны схемам для генераторов. Двигатели постоянного тока большой мощности выполняются обычно с независимым возбуждением . У двигателей параллельного возбуждения обмотка возбуждения получает питание от того же источника энергии, что и двигатель. Обмотка возбуждения включается непосредственно на напряжение источника энергии, чтобы не сказывалось влияние падения напряжения в пусковом сопротивлении (рис. 2).
Рис. 2. Схема двигателя постоянного тока с параллельным возбуждением
Ток сети Ic составляется из тока якоря I я и тока возбуждения I в.
Схема двигателя последовательного возбуждения подобна схеме на рис. 1, в. Благодаря последовательной обмотке вращающий момент при нагрузке возрастает больше, чем у двигателей параллельного возбуждения, при этом скорость вращения уменьшается. Это свойство двигателей определяет их широкое применение в приводах электровозной тяги: в магистральных электровозах, городском транспорте и др. Падение напряжения в обмотке возбуждения при номинальном токе составляет единицы процентов от номинального напряжения.
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
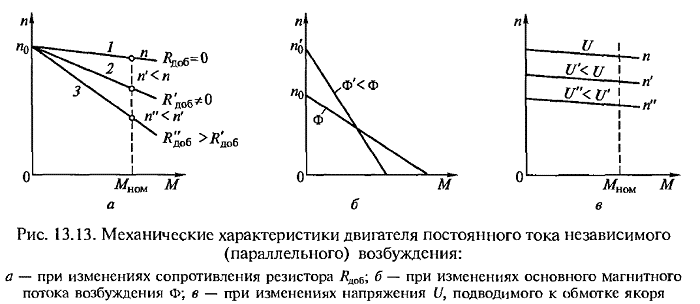
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
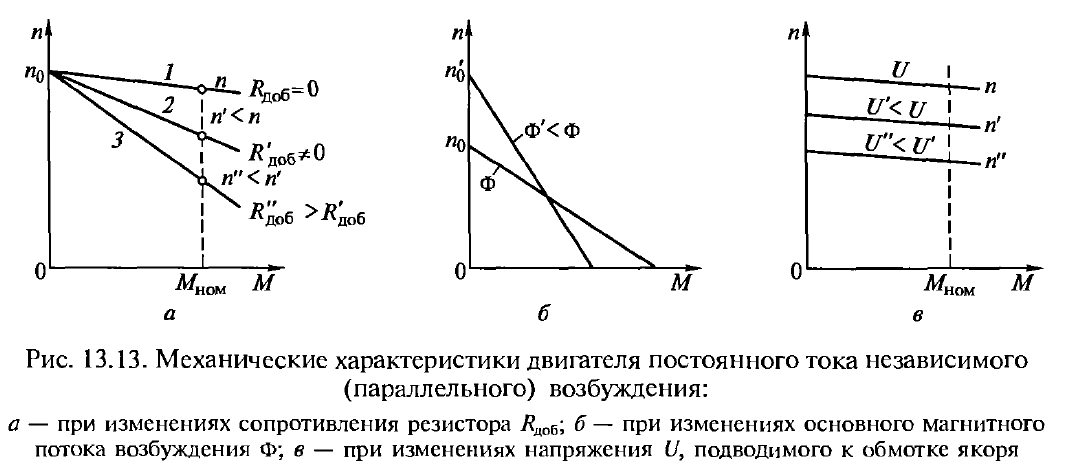
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдобдля получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n — частота вращения холостого хода, об/мин.
Частота вращения холостого хода nпредставляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n, a Δn остается неизменным . В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман
М.М.Справочникпоэлектрическиммашинам Источник
Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
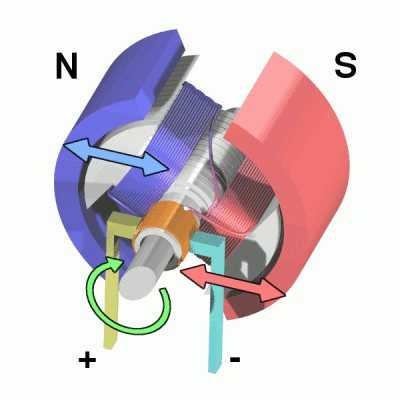
Картинка кликабельна.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Динамическое торможение.
Необходимость в таком торможении возникает в том случае, когда после отключения двигателя от сети его якорь под действием кинетической энергии движущихся масс электропривода продолжает вращаться. Если при этом обмотку якоря, отключив от сети, замкнуть на резистор rт, то двигатель перейдет в генераторный режим (обмотка возбуждения должна оставаться включенной в сеть). Вырабатываемая при этом электроэнергия не возвращается в сеть, как это происходит при рекуперативном торможении, а преобразуется в теплоту, которая выделяется в сопротивлении
В режиме динамического торможения ЭДС якоря не меняет своего направления, но поскольку якорь отключен от сети (U = 0), то ток якоря изменит направление, так как будет создаваться ЭДС Еа
т.е. станет отрицательным. В результате электромагнитный момент также
изменит направление и станет тормозящим (рис. 13.15, б). Процесс торможения продолжается до полной остановки якоря (n = 0).
6.1. Генераторы с независимым возбуждением.
В подобных генераторах обмотка возбуждения питается от отдельного источника,
вследствие чего ток возбуждения не зависит от напряжения генератора,
а следовательно, от условий нагрузки (рис.6.4).
Это дает возможность в очень широких пределах менять магнитный поток,
а следовательно, и ЭДС, возникающую на обмотке якоря. Зависимость ЭДС
от тока возбуждения при постоянном числе оборотов называется характеристикой
холостого хода (рис. 6.5).
Наличие остаточной намагниченности системы возбуждения приводит к
тому, что при отсутствии тока возбуждения, ЭДС возбуждения в якоре не
равна 0, а равна остаточной ЭДС, Е. С ростом тока возбуждения
магнитное поле возрастает и приводит к магнитному насыщению системы
возбуждения, вследствие чего, при значительных токах возбуждения ЭДС
не возрастает.
Вид этой характеристики аналогичен подобной характеристике синхронного
генератора.
Важной характеристикой генератора является внешняя зависимость напряжения
U на выходе генератора от силы тока якоря (рис.6.6.А). Эта зависимость
определяется соотношением:. где Е — ЭДС якоря, Iн — ток нагрузки, Rя
— сопротивление обмотки якоря и представляет собой прямую (рис
6.6.Б
пунктир)
где Е — ЭДС якоря, Iн — ток нагрузки, Rя
— сопротивление обмотки якоря и представляет собой прямую (рис. 6.6.Б
пунктир).
Однако, при значительных токах нагрузки появляется насыщение магнитной
системы и возникает размагничивающее действие реакции якоря, что приводит
к уменьшению суммарного магнитного потока, а следовательно ЭДС и выходного
напряжения быстрее, чем по прямой линии.
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
где: n — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Принцип работы
На провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами.
Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
I = U / (Rобм + Rреостата)
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
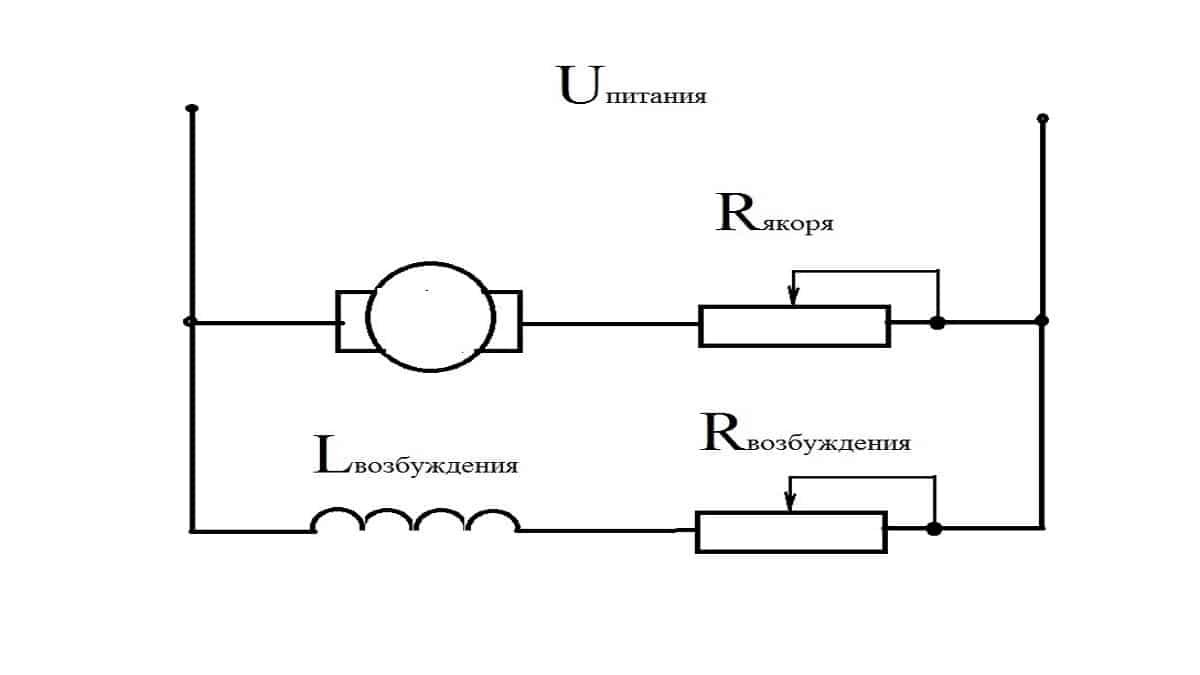
Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
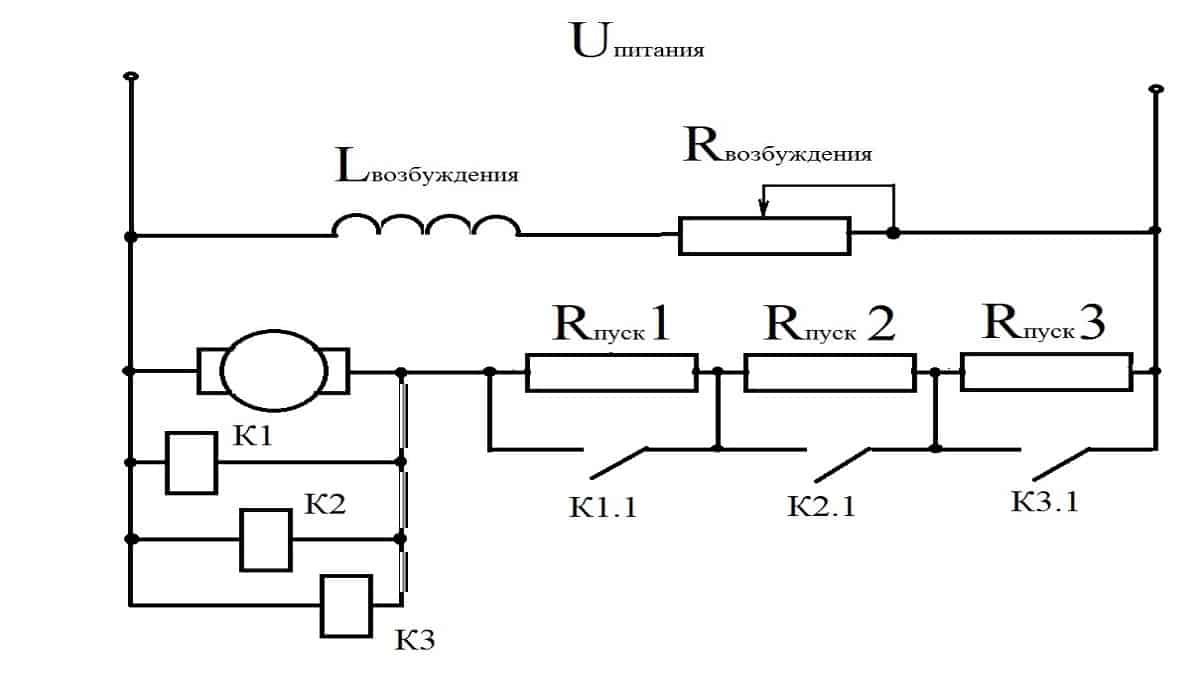
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.
- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.
- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.
Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
Запуск ДПТ с последовательным возбуждением
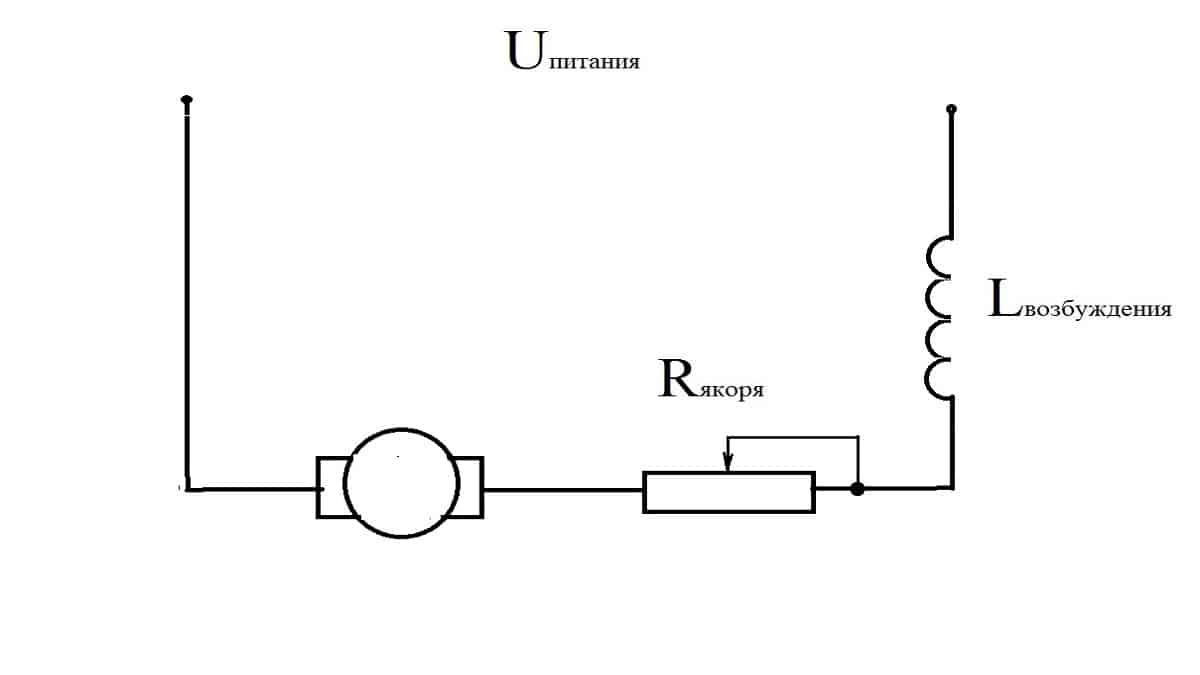
Рис. 3. Запуск ДПТ с последовательным возбуждением На рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
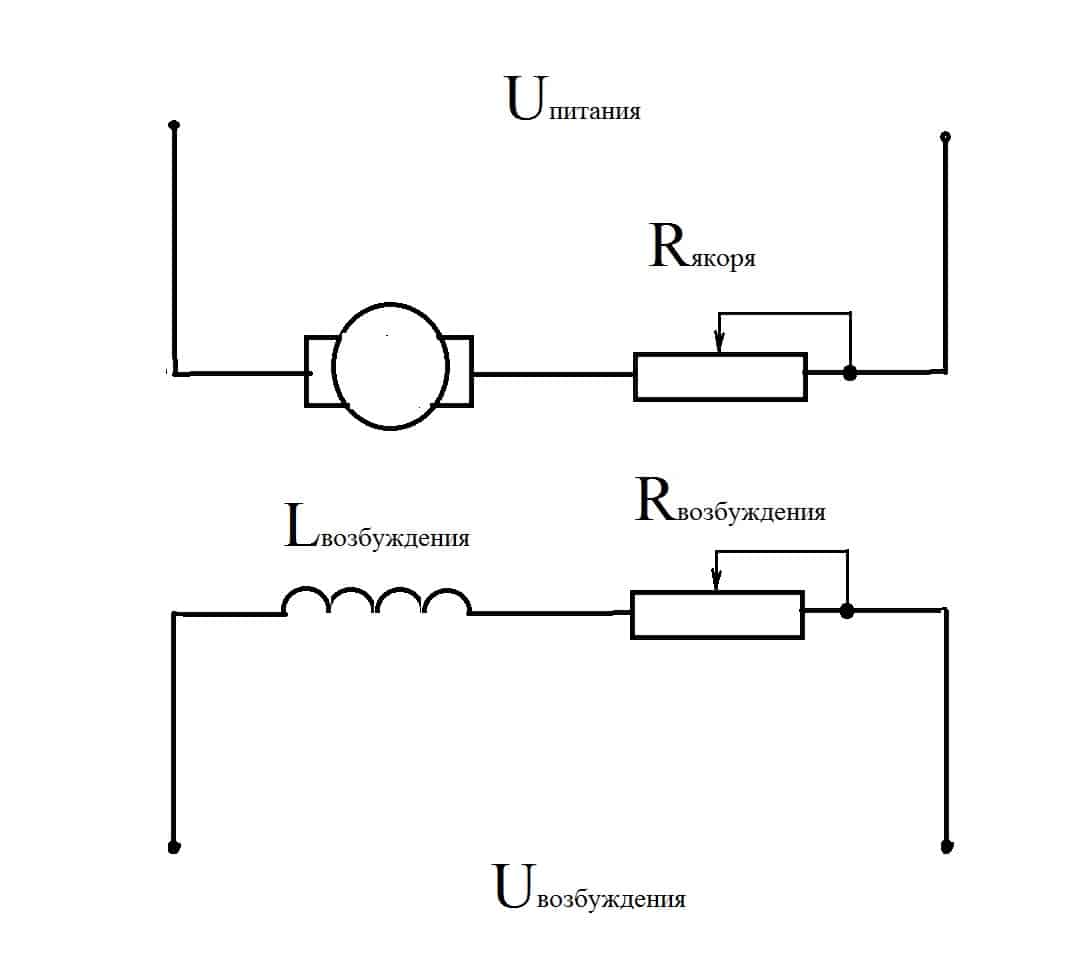
Рис. 4. Запуск ДПТ с независимым возбуждением
На схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
Примеры механических характеристик ДПТ независимого возбуждения
Регулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
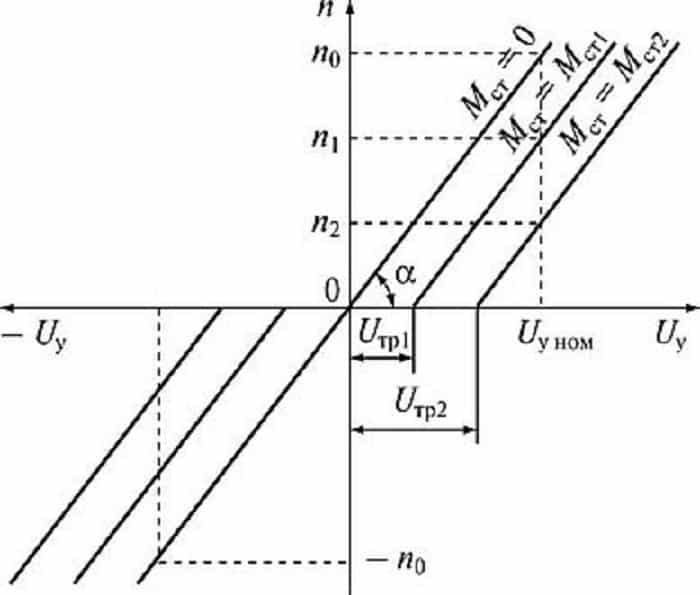
Пример регулировочных характеристик двигателя с якорным управлением
Благодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения
В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения
Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Электрический двигатель постоянного тока
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.