
Преобразование энергии
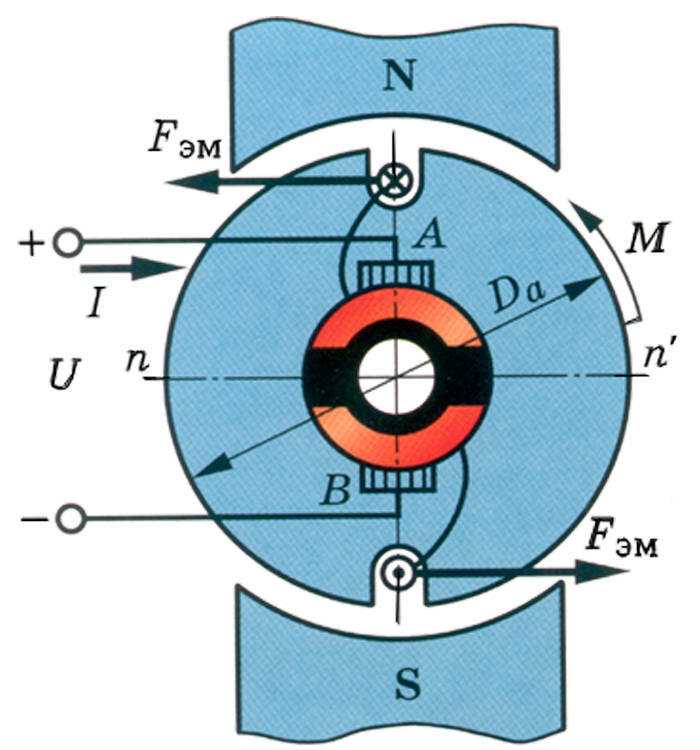
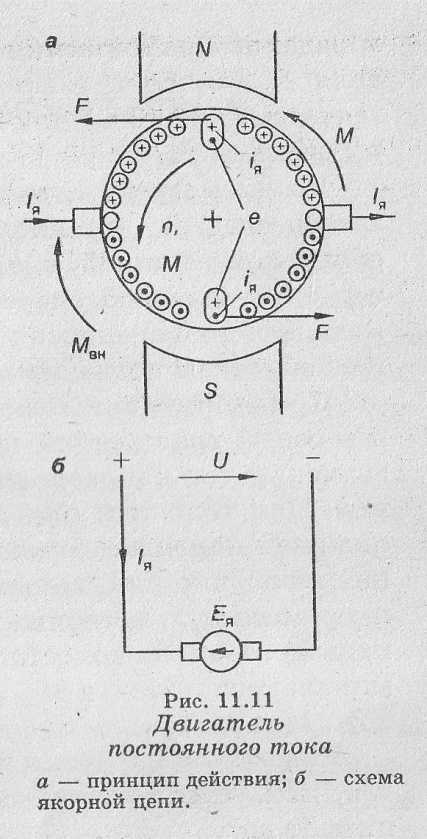
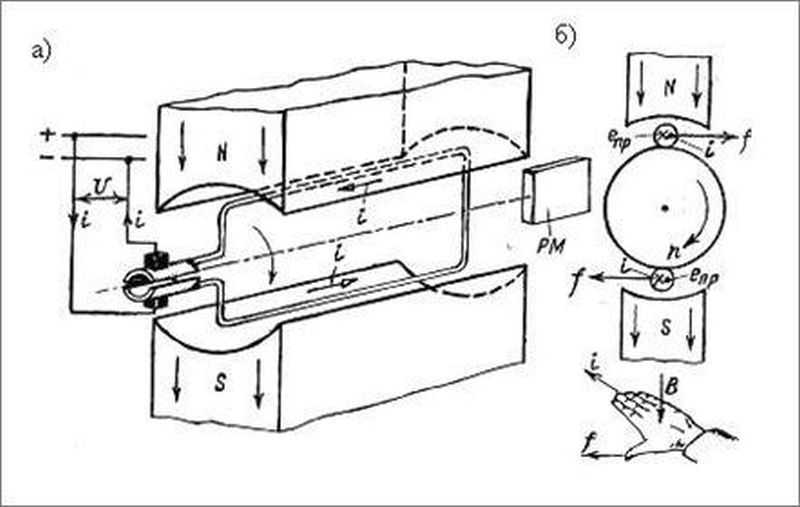
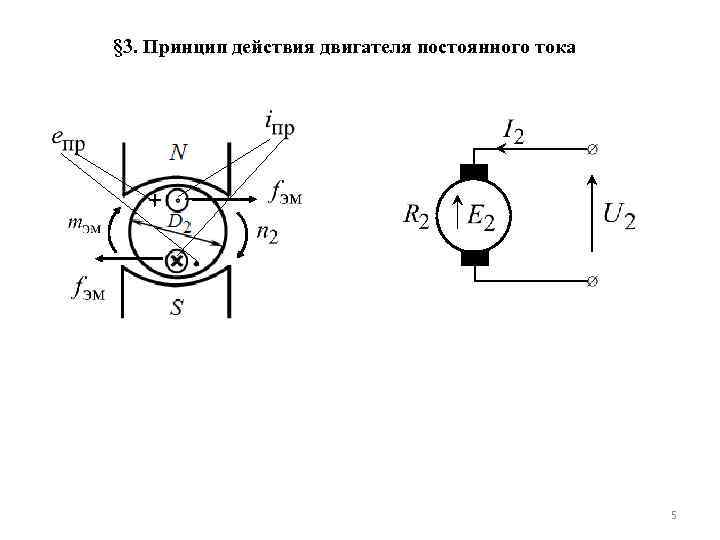
На рисунке 5 показаны направления действия механических и электрических величин в якоре генератора и двигателя постоянного тока.
Рисунок 5. Направление э. д. с., тока и моментов в генераторе (а) и двигателе (б) постоянного тока
Согласно первому закону Ньютона в применении к вращающемуся телу, действующие на это тело движущие и тормозные вращающие моменты уравновешивают друг друга. Поэтому в генераторе при установившемся режиме работы электромагнитный момент
| Mэм = Mв — Mтр — Mс, | (7а) |
где Mв – момент на валу генератора, развиваемый первичным двигателем, Mтр – момент сил трения в подшипниках, о воздух и на коллекторе электрической машины, Mс – тормозной момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря. Эти потери мощности появляются в результате вращения сердечника якоря в неподвижном магнитном поле полюсов. Возникающие при этом электромагнитные силы оказывают на якорь тормозящее действие и в этом отношении проявляют себя подобно силам трения.
В двигателе при установившемся режиме работы
| Mэм = Mв + Mтр + Mс, | (7б) |
где Mв – тормозной момент на валу двигателя, развиваемый рабочей машиной (станок, насос и т. п.).
В генераторе Mэм является тормозным, а в двигателе – вращающим моментом, причем в обоих случаях Mв и Mэм противоположны по направлению.
Развиваемая электромагнитным моментом Mэм мощность Pэм называется электромагнитной мощностью и равна
| Pэм = Pэм × Ω, | (8) |
где
| Ω = 2 × π × n, | (9) |
представляет собой угловую скорость вращения.
Подставим в выражение (8) значение Mэм и Ω из равенств (5) и (9) и учтем, что линейная скорость на окружности якоря
Тогда получим
| Pэм = 2 × B × l × Dа × Iа × π × n = 2 × B × l × v × Iа |
или на основании выражения (1)
| Pэм = Eа × Iа. | (10) |
В обмотке якоря под действием э. д. с. Eа и тока Iа развивается внутренняя электрическая мощность якоря
| Pа= Eа × Iа. | (11) |
Согласно равенствам (10) и (11), Pэм = Pа, т. е. внутренняя электрическая мощность якоря равна электромагнитной мощности, развиваемой электромагнитным моментом, что отражает процесс преобразования механической энергии в электрическую в генераторе и обратный процесс в двигателе.
Умножим соотношения (3) и (6) на Iа. Тогда для генератора будем иметь
| Uа × Iа = Eа × Iа – Iа2 × rа | (12) |
и для двигателя
| Uа × Iа = Eа × Iа + Iа2 × rа. | (13) |
Левые части этих выражений представляют собой электрические мощности на зажимах якоря, первые члены правых частей – электромагнитную мощность якоря и последние члены – электрические потери мощности в якоре.
Приведенные соотношения действительны и при более сложной обмотке якоря, так как э. д. с. и моменты отдельных проводников складываются. Эти соотношения являются выражением закона сохранения энергии и отражают процесс преобразования энергии в машине постоянного тока.
Согласно им механическая мощность, развиваемая на валу генератора первичным двигателем, за вычетом механических и магнитных потерь, превращается в электрическую мощность в обмотке якоря, а электрическая мощность за вычетом потерь в этой обмотке выдается во внешнюю цепь. В двигателе электрическая мощность, подводимая к якорю из внешней цепи, частично расходуется на потери в обмотке якоря, а остальная часть этой мощности превращается в мощность электромагнитного поля и последняя – в механическую мощность, которая за вычетом потерь на трение и потерь в стали якоря передается рабочей машине.
Установленные выше применимо к машине постоянного тока общие закономерности превращения энергии в равной степени относятся также к машинам переменного тока.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.





В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
106 thoughts on “Двигатель постоянного тока. Характеристики и регулирование”
Я очень ждал статей про двигатели. Специалист по электроприводу научил нас как работать с AVR, а про моторчики нифига не написал. Еще будут статьи на эту тему?
Мне порвала шаблон обратная зависимость между магнитным потоком возбуждения и скоростью вращения. По формуле я вижу, что это так, но понять не могу. Особенно удивил уход вразнос при отключении обмотки возбуждения. Если нет магнитного потока статора, то от чего «отталкивается» ротор? Как двигатель может вообще работать в таком режиме?
Отталкивается от остаточного возбуждения. Намагниченности полюсов
Но ты обрати внимание, что момент там тоже уходит в ноль. Так что либо отталкиваться бешеным током, либо снижать момент до нуля
Да, про момент я заметил. Понятно, что разгон будет происходить только без нагрузки и только, если источник питания способен выдать нужный ток.
Статьи может быть будут еще, не скажу. Я, на самом деле, за 7 лет изрядно эту тему подзабыл за неиспользованием. Особенно касаемо всякого продвинутого регулирования и динамики привода. Так что не такой я уж специалист по приводу
Можно и без продвинутого регулирования для начала. Меня совсем базовые вещи интересуют. Типа, какие бывают способы управления и, соответственно, какие драйверы их реализуют, чем отличаются, плюсы, минусы, подводные камни. Для коллекторных и бесколлекторных двигателей постоянного тока
На что следует обратить внимание при разработке схем с электродвигателями, чтобы не сжечь все нафиг. В общем, такая статья в раздел «Начинающим»
Но и более емкие статьи я бы с удовольствием прочитал.
Ну базовые вещи я уже описал А дальше додумываешь сам. Напряжение можно рулить ШИМом. Можно обратную связь по току-моменту замутить. Обращаться с ними также как с любой индуктивностью, о чем я тоже уже писал. Не расписывал только H-мосты самодельные. Но тут тема такая, на всех не угодишь, слишком они разные бывают.
Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ. Я БУДУ ЧИТАТЬ ДО КОНЦА, ПРЕЖДЕ ЧЕМ КОММЕНТИРОВАТЬ.
Модели — не игрушки. Совсем другие требования, и другие цены. А в дешевых игрушках, — как правило, дешевые коллекторные движки с проволочными щетками. Да и в самых дешевых моделях вертолета с соосными винтами (по сути, те же игрушки) — тоже коллекторные.
Имеется двигатель постоянного тока мощностью 60Вт, напряжение питания 48В. Как его можно переделать чтобы питать от 12В не потеряв в мощности?
Применение магнитных цепей
Магнитные цепи находят очень большое поле применения, а именно, они используются для надежного пропускания магнитного потока по специальному проводнику с минимальными или, в некоторых случаях, определенными потерями. В электротехнической промышленности широко используется взаимная зависимость магнитной и электрической энергий, переход из одного состояния в другое. На подобном принципе работают, например, трансформаторы, разные электродвигатели, генераторы и другие устройства.
Конечно, можно продолжительное время говорить об устройствах, разных типах магнитопроводов (про которые речь пойдет далее), но наша первичная цель — рассмотреть выводы основных характеристик магнитных цепей. Продолжаем!
7.8. ТАХОГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
Тахогенераторами называют электрические машины малой мощности, работающие
в генераторном режиме и служащие для преобразования частоты его вращения
в электрический сигнал.
Тахогенераторы постоянного тока по принципу действия и конструктивному
оформлению являются электрическими коллекторными машинами.
Выходной характеристикой тахогенератора является зависимость величины
на-пряжения на зажимах якоря Uя от частоты его вращения n при постоянном
магнитном потоке возбуждения Ф и постоянном сопротивлении нагрузки Rнагр
На рис. 7.8.1 показана выходная характеристика тахогенератора при различных
Rнагр.
Модель ДПТ
Из теоретических основ видно, что для электродвигателя присутствие постоянного магнитного поля обязательно. Для этого в маломощных ДПТ применяют постоянные магниты. Для средне- и высокомощных агрегатов требовались бы очень громоздкие магниты, поэтому их заменяют обмоткой возбуждения, иногда – индуктором. По ним пропускают ток, и они формируют магнитное поле.



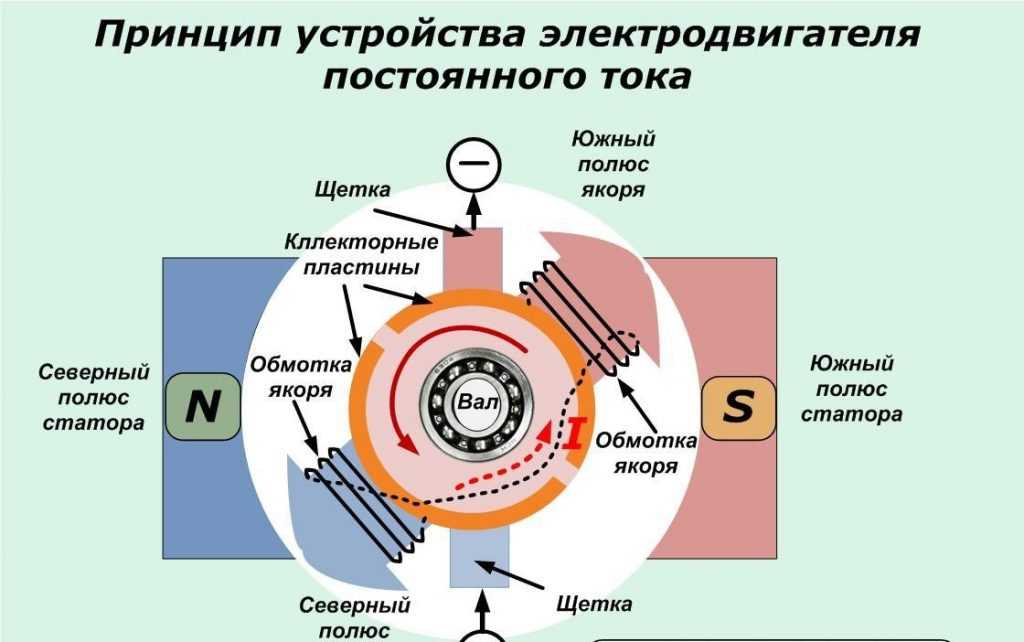
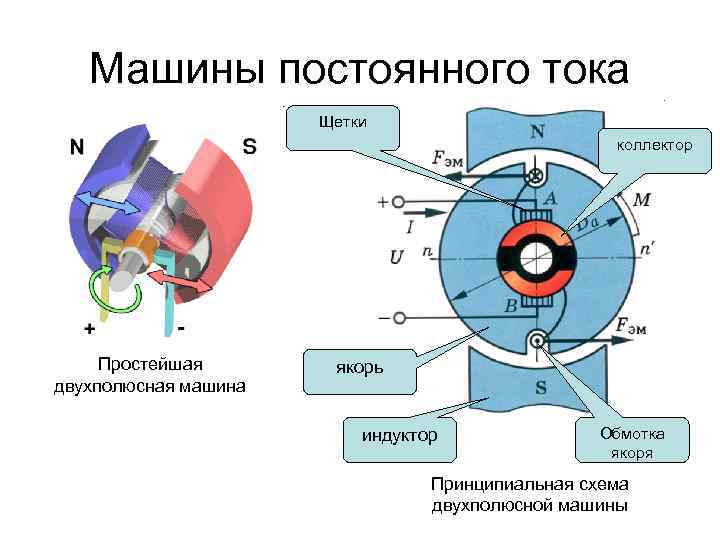
Элеентарная модель ДТП – это однородное магнитное поле, внутрь которого поставлена рамка. По ней пускают ток. Сначала она оборачивается, а достигнув положения «горизонтально» – останавливается. Такое положение называют мертвой точкой. Останавливается рамка потому, что по одной стороне ток течет в одну сторону, а с другой – в противоположную. Это значит, что они образуют взаимообратные поля. Они возмещают действия друг друга, и движение прекращается. Чтобы оно было бесконечным, необходима еще одна рамка, сцепленная с первой. Тогда всегда какая-то из двух рамок будет создавать разнородность в поле, которая будет заставлять двигаться рамочную систему целиком.
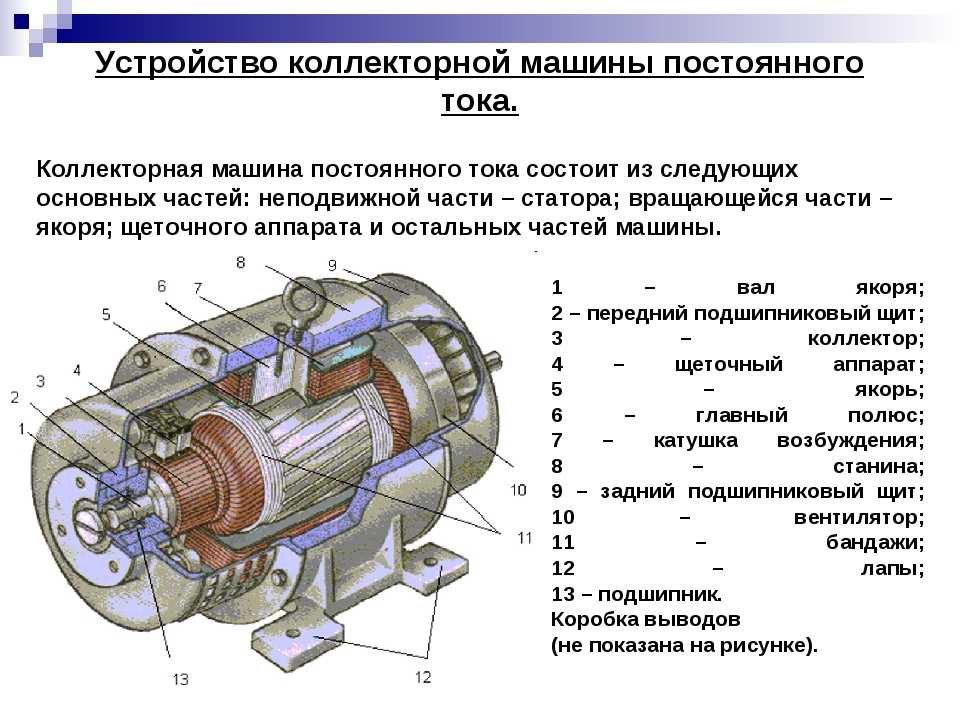
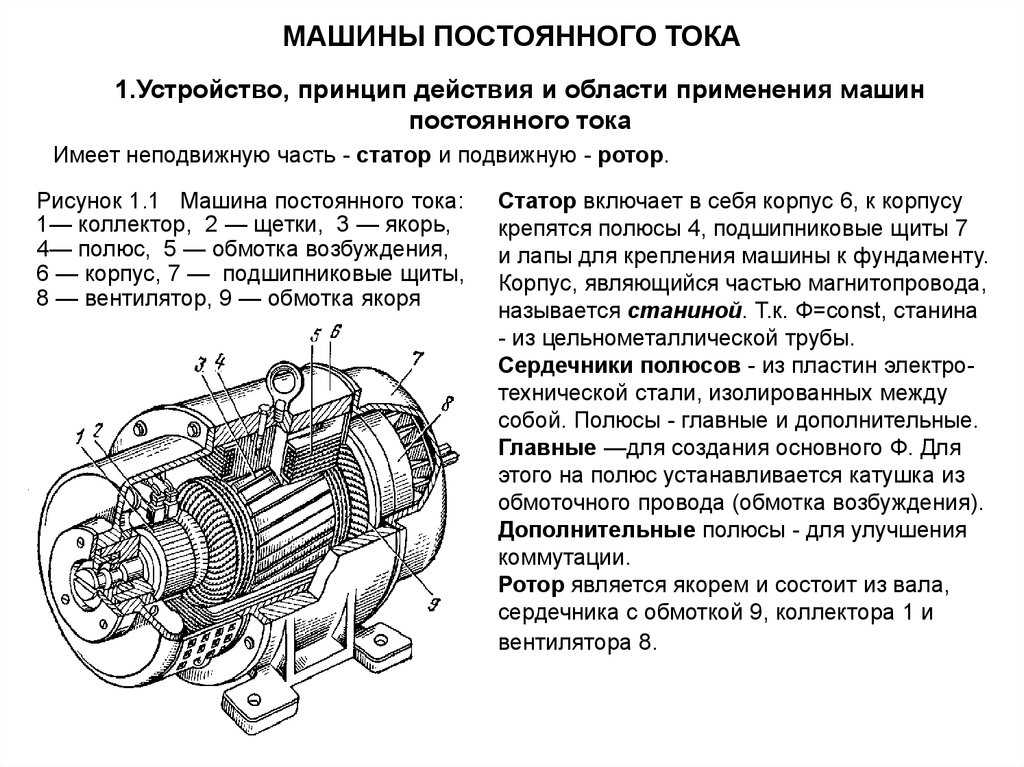
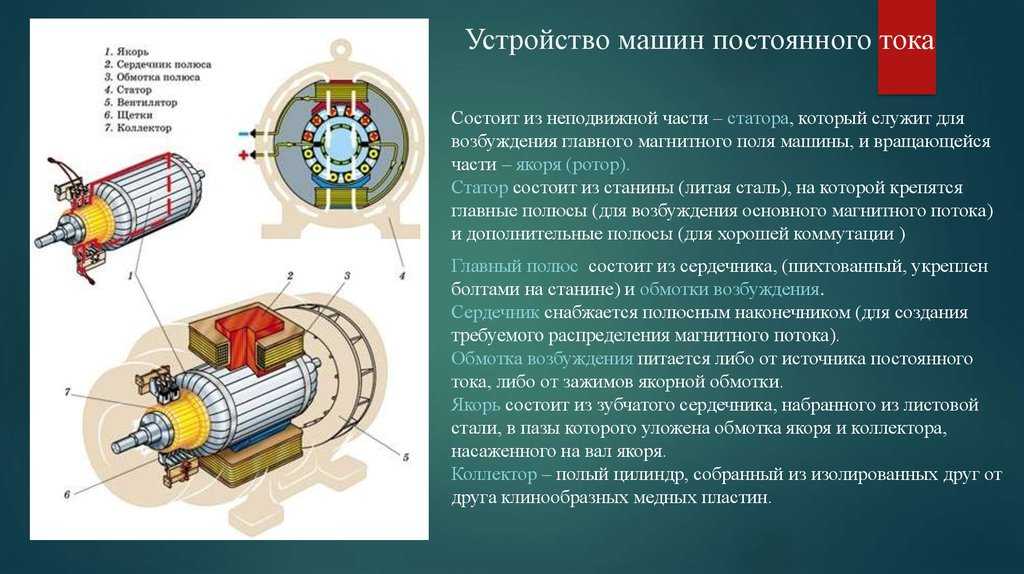
Устройство и описание ДПТ
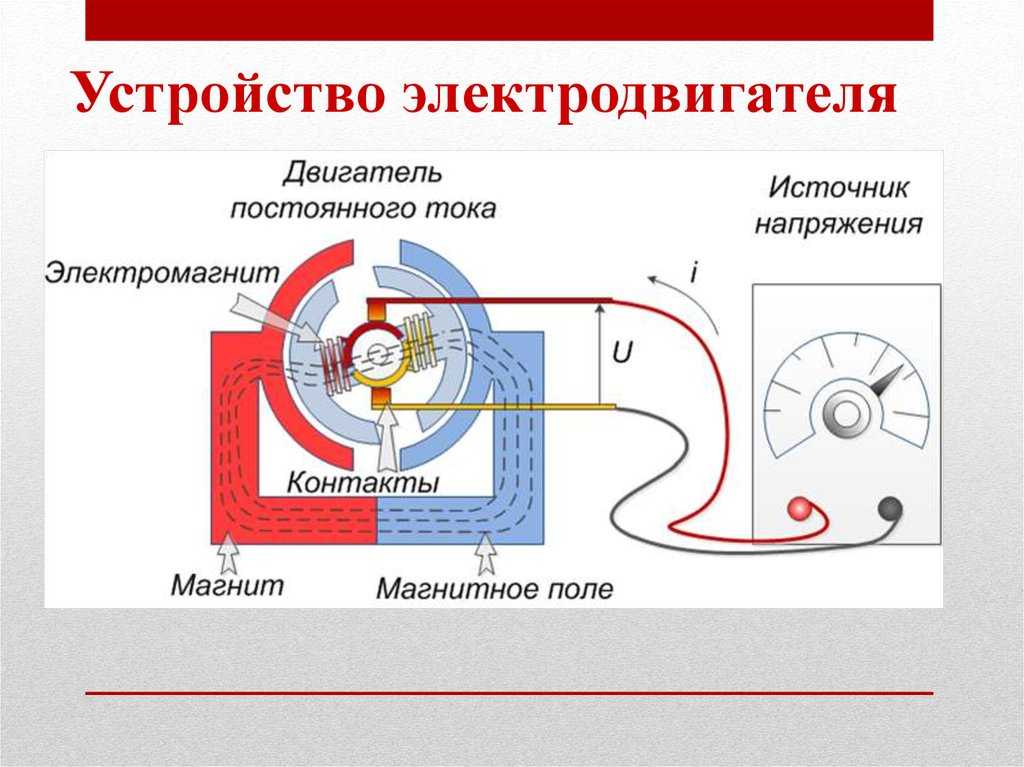
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
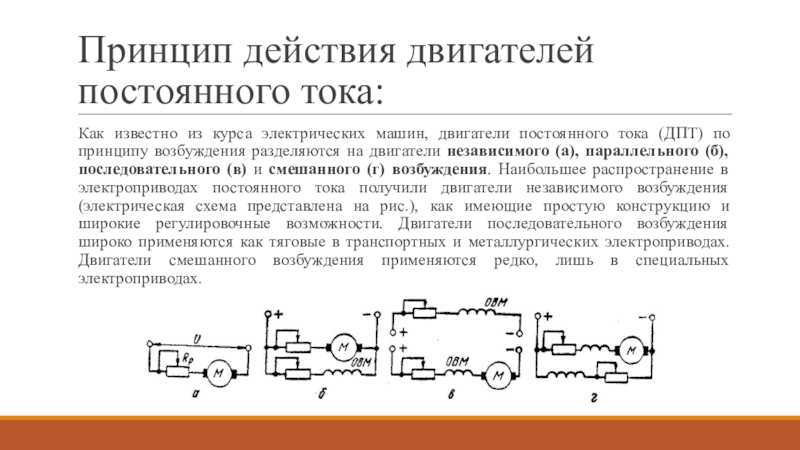
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
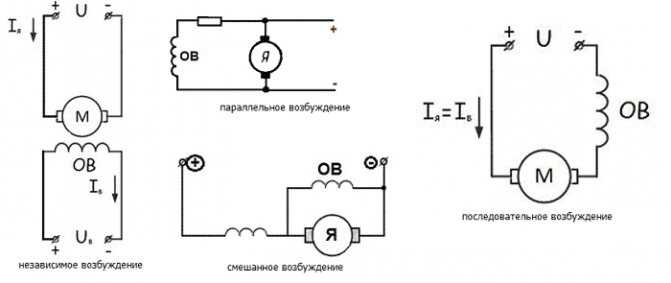
Рисунок 2. Схемы подключения обмоток статора ДПТ
У каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.

Рисунок 3. Ротор с тремя обмотками

Рисунок 4. Якорь со многими обмотками
Подобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
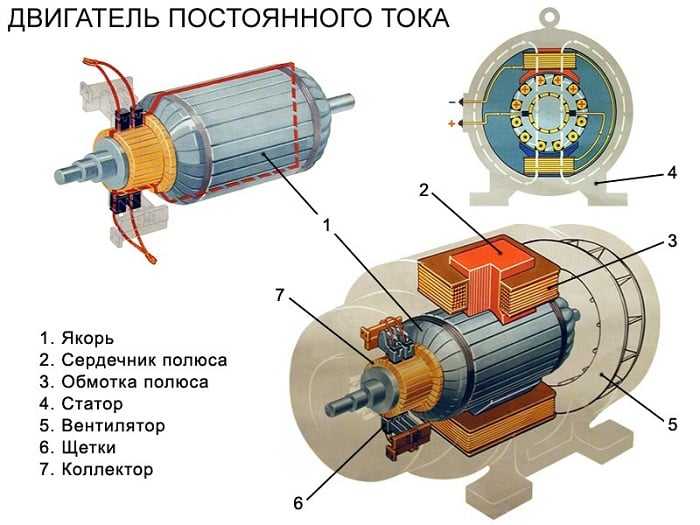
Рисунок 5. Схема электромотора с многообмоточным якорем
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.


Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Модель ДПТ
Из теоретических основ видно, что для электродвигателя присутствие постоянного магнитного поля обязательно. Для этого в маломощных ДПТ применяют постоянные магниты. Для средне- и высокомощных агрегатов требовались бы очень громоздкие магниты, поэтому их заменяют обмоткой возбуждения, иногда – индуктором. По ним пропускают ток, и они формируют магнитное поле.
Элеентарная модель ДТП – это однородное магнитное поле, внутрь которого поставлена рамка. По ней пускают ток. Сначала она оборачивается, а достигнув положения «горизонтально» – останавливается. Такое положение называют мертвой точкой. Останавливается рамка потому, что по одной стороне ток течет в одну сторону, а с другой – в противоположную. Это значит, что они образуют взаимообратные поля. Они возмещают действия друг друга, и движение прекращается. Чтобы оно было бесконечным, необходима еще одна рамка, сцепленная с первой. Тогда всегда какая-то из двух рамок будет создавать разнородность в поле, которая будет заставлять двигаться рамочную систему целиком.
Коллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
7.9. МИКРОДВИГАТЕЛИ, ПРИМЕНЯЕМЫЕ В ДЕТСКОМ ТЕХНИЧЕСКОМ ТВОРЧЕСТВЕ
Разнообразие изделий детского технического творчества не позволяет
остановиться на конкретных решениях.
В структурные композиции любого подвижного объекта почти всегда входит
электродвигатель. Именно он преобразует электрическую энергию в механическое
движение.
Разновидность электропривода модели в первую очередь зависит от источника
питания.
Если модель работает автономно, то, естественно, для нее необходим и
автоном-ный источник питания. Это, как правило, электрохимическая батарейка
или аккумулятор.
При выборе схемы электропривода необходимо лишь согласовать напряжение
электродвигателя с источником питания.
В стационарных установках используется обычная электросеть напряжением
220, 127 В. Для понижения напряжения до безопасного уровня применяются
понижающие трансформаторы и иногда выпрямители переменного тока в постоянный.
Такие приборы могут не входить в конструкцию изделия и являются вспомогательными.
Ниже в табл. 7.9.1 приводится техническая характеристика наиболее применяемых
в техническом творчестве электродвигателей.
Преимущества и недостатки

Оборудование данной категории отлично справляется с отрицательным воздействием факторов окружающей среды. Способствует этому наличие полностью закрытого корпуса. Конструкция электродвигателей постоянного тока предусматривает наличие уплотнений, что исключают проникновение влаги в систему.
Защита в виде надежных изоляционных материалов дает возможность задействовать максимальный ресурс агрегатов. Допускается применение подобного оборудования при температурных условиях в пределах от -50 до +50 о С и относительной влажности воздуха порядка 98 %. Запуск механизма возможен после периода длительного простоя.
Среди недостатков электрических двигателей постоянного тока на первое место выходит достаточно быстрый износ щеточных узлов, что требует соответствующих расходов на обслуживание. Сюда же относится крайне ограниченный срок службы коллектора.
Источник
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть с постоянными магнитами и с обмотками возбуждения.
Коллекторный двигатель с постоянными магнитами
Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. Индуктор этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора . КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
Преимущества:лучшее соотношение цена/качество
высокий момент на низких оборотах
быстрый отклик на изменение напряжения
постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
- По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:
- независимого возбуждения
- последовательного возбуждения
- параллельного возбуждения
- смешанного возбуждения
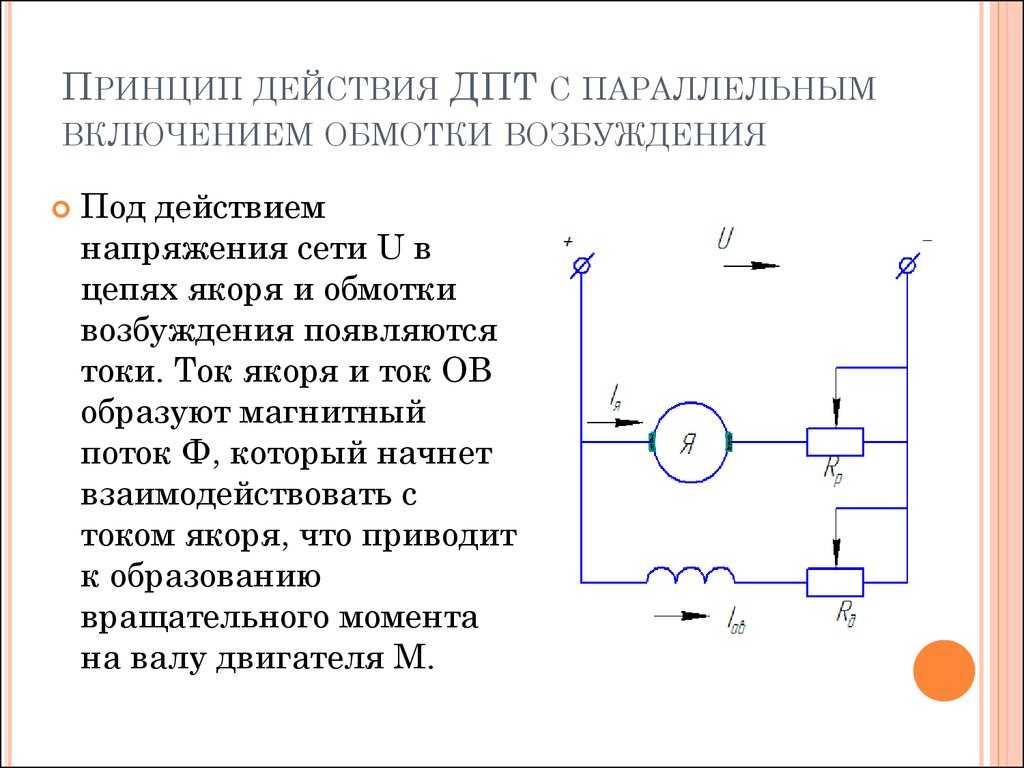
Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой якоря (рисунок выше). Обычно напряжение возбуждения UОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы .
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения
питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается.При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
Преимущества:практически постоянный момент на низких оборотах
хорошие регулировочные свойства
отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
Недостатки:дороже КДПТ ПМ
двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет механическую характеристику с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с КДПТ ПМ, двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным. Недостатками двигателя параллельного возбуждения являются более высокая себестоимость и возможность выхода двигателя из под контроля, в случае если ток индуктора снизится до нуля, что в свою очередь может привести к поломке двигателя .
![Как работает электродвигатель [для чайников]](https://oksimetr.ru/wp-content/uploads/7/f/5/7f5d0c5a26882809f0c84eed4ec2aacd.jpeg)

https://youtube.com/watch?v=uPdv7l9zx2c
Как устроены магнитные цепи?
Магнитную цепь, на самом деле, не так сложно представить, как может показаться человеку, который о них впервые слышит. Обычно магнитные цепи представляют из себя некоторые фигуры из ферромагнитного сердечника с источником или несколькими источниками ПОтока. Пожалуй, один из самых простых примеров с одним источником, который можно взять на вооружение, проиллюстрирован ниже:
Перед продолжением обусловимся, что среди электротехников сердечник называют магнитопроводом. Часть магнитопровода, на которой отсутствуют обмотки и которая служит для замыкания магнитной цепи, называется «ярмо».
Начнем с тороидального сердечника. Такой тороидальный сердечник может служить формой для катушки, как бы странно это не звучало. Но что за катушка? Ну, первое что приходит в голову — провод, образующий витки. Хорошо, но какого его предназначение? Вернемся к электрическим цепям и вспомним, что существуют источники тока / напряжения, так называемые активные элементы. Так вот, в магнитных цепях роль источника выполняют катушки с током, накрученные на основной элемент магнитной цепи — ферромагнитный магнитопровод.
Вспомним теперь про ферромагнитные материалы. Почему именно они? Дело в том, что благодаря высокому значению магнитной проницаемости, что сигнализирует о хорошей намагниченности ферромагнетика, силовые линии магнитного поля практически не выходят за пределы сердечника, либо не выходят вовсе. Однако это будет справедливо лишь тогда, когда наш сердечник замкнутый, либо имеет небольшие зазоры. То есть, ферромагнетики обладают сильно выраженными магнитными свойствами, когда как у парамагнетиков и диамагнетиков они значительно слабее, что можно наблюдать на следующем графике зависимости намагниченности от напряженности магнитного поля:
Вещества, которые входят в конструкцию магнитопровода, могут обладать не только сильномагнитными свойствами, но также и слабомагнитными. Однако мы рассматриваем сердечник из ферромагнитного материала.
Ещё из школьного курса мы представляем себе картину с линиями магнитной индукции соленоида, мы можем визуально представить его поле и понимаем, что концентрация силовых линий, их насыщенность, наибольшая в центре рассматриваемого соленоида
Тут очень важно вспомнить правило буравчика, чтобы правильно указать направление силовых линий
Отсюда становится ясно, что катушки-источники порождают магнитное поле, а следовательно и поток линий магнитной индукции. Такие линии будут циркулировать по нашему сердечнику, словно повторяя его форму
Именно поэтому нам важно условие замкнутости сердечника и материал, из которого он сделан. Положим, что наш воображаемый сердечник замкнут
Из этого следует, что и силовые линии замкнуты, а следовательно выполняется теорема Гаусса для магнитного поля, которая гласит: поток линий магнитной индукции через замкнутую поверхность равен нулю. Стоит учесть, что поток адаптируется под площадь сечения.*
Ну и в конечном счете ферромагнитный сердечник поток куда-то передает! Аналогичным образом замкнутый проводник позволяет передать электрический ток.
Отлично! Мы разобрались с тем, что такое магнитные цепи и даже вспомнили про теорему Гаусса и ферромагнетики. Теперь поговорим о том, какие следствия вытекают из теоремы Гаусса и возможности пренебрежения полем вне сердечника и в зазорах.
1] Магнитные потоки Ф1 и Ф2 через произвольные сечения будут равны между собой.
2] В узле (разветвлении) сердечника алгебраическая сумма потоков (с учетом их направлений) будет равна нулю… Мне одному это что-то напоминает?
То есть мы окончательно сформулировали, что замкнутая (или почти замкнутая) система из ферромагнитных сердечников может рассматриваться как проводящая цепь. В нашем случае — магнитная.

![Как работает электродвигатель [для чайников]](https://oksimetr.ru/wp-content/uploads/b/e/2/be2f33e728f9a717f51554c31859e981.jpeg)
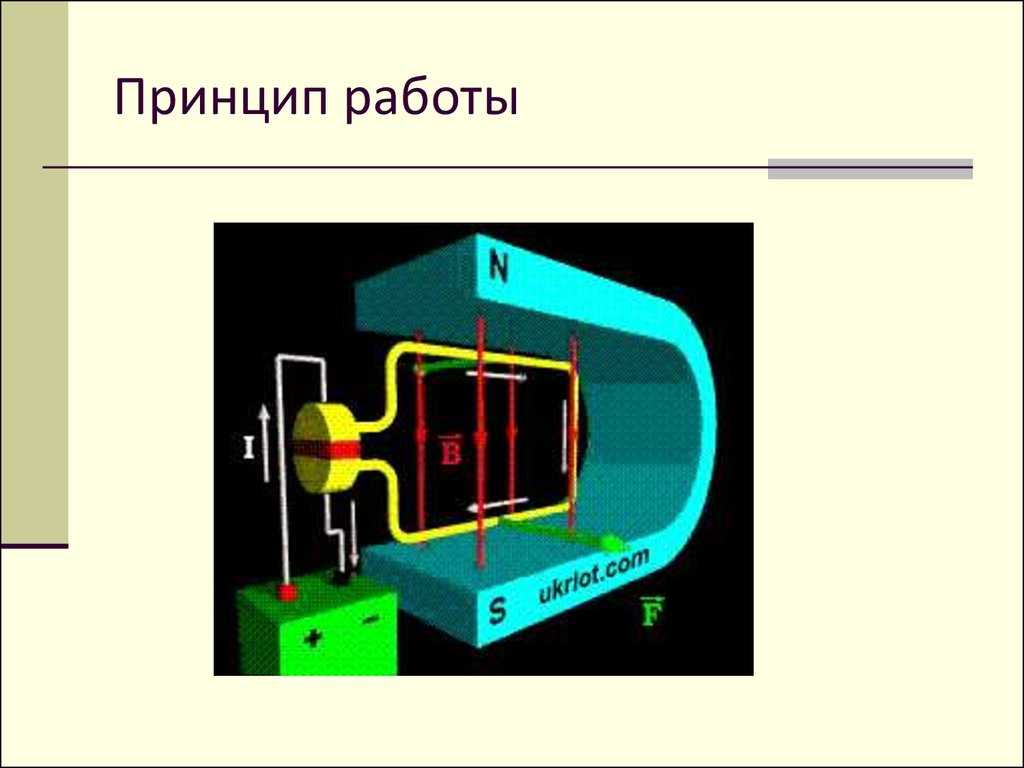


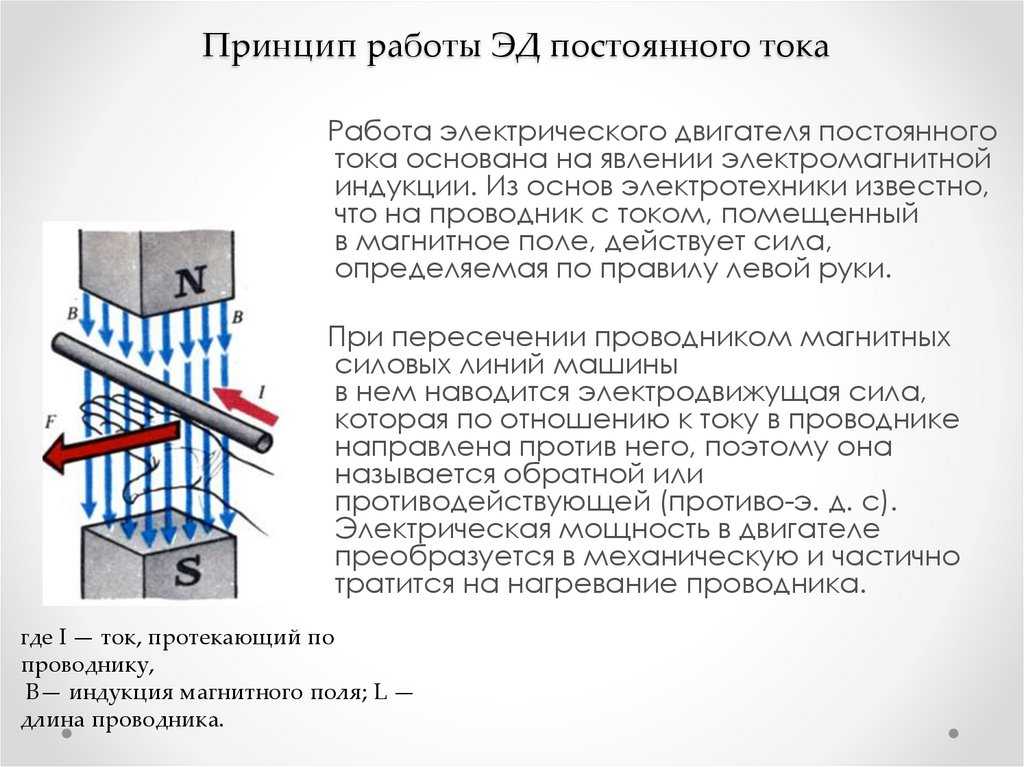
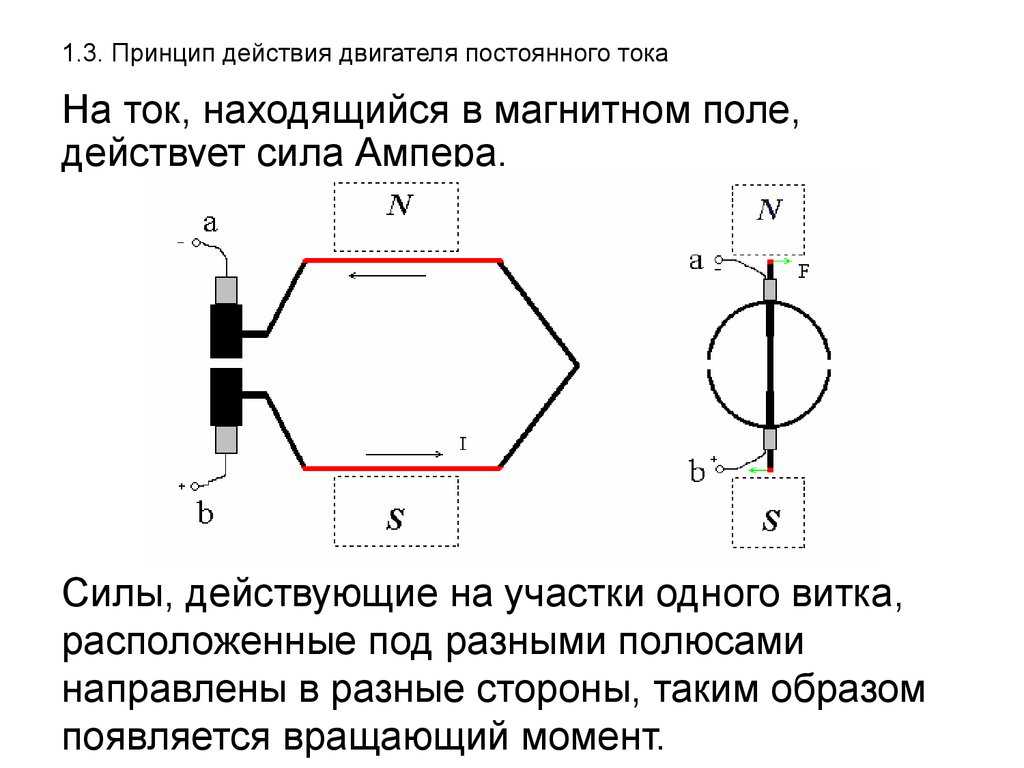
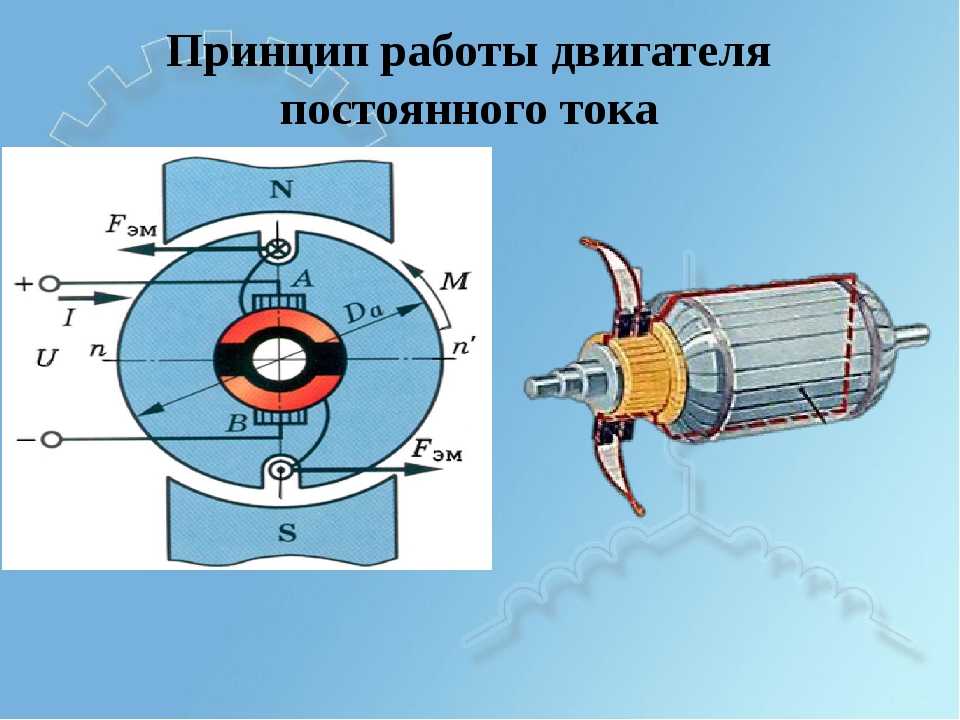
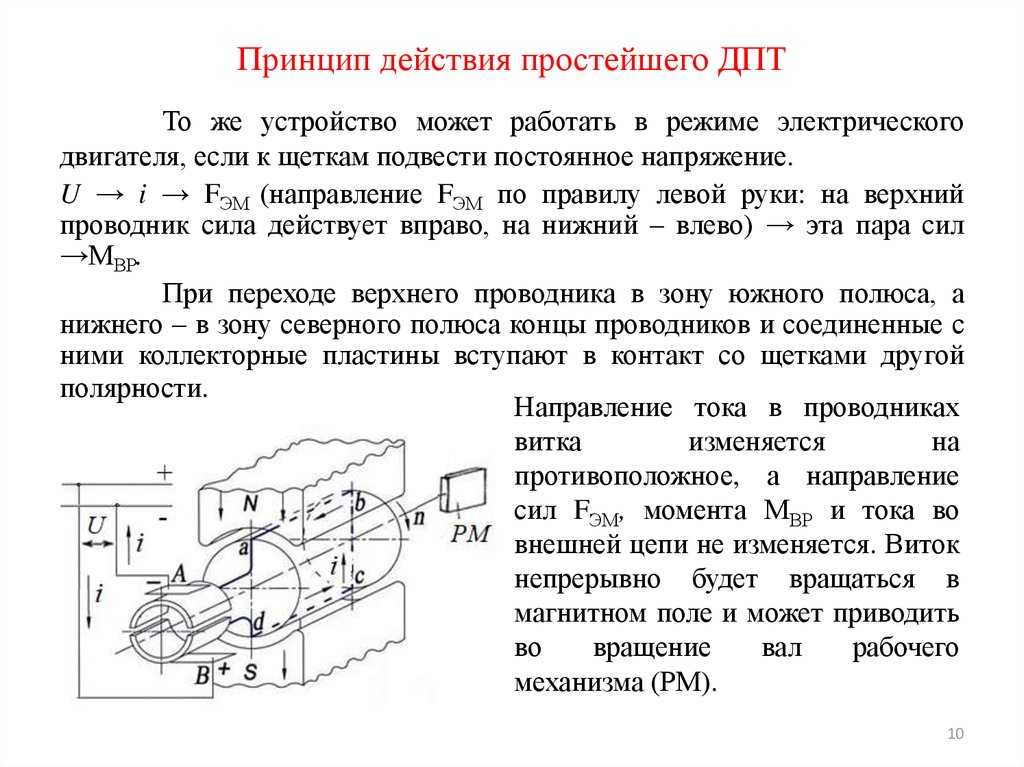
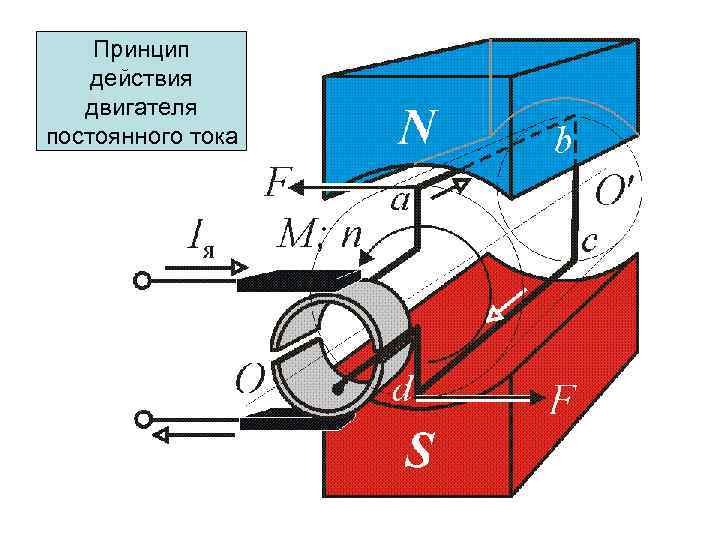
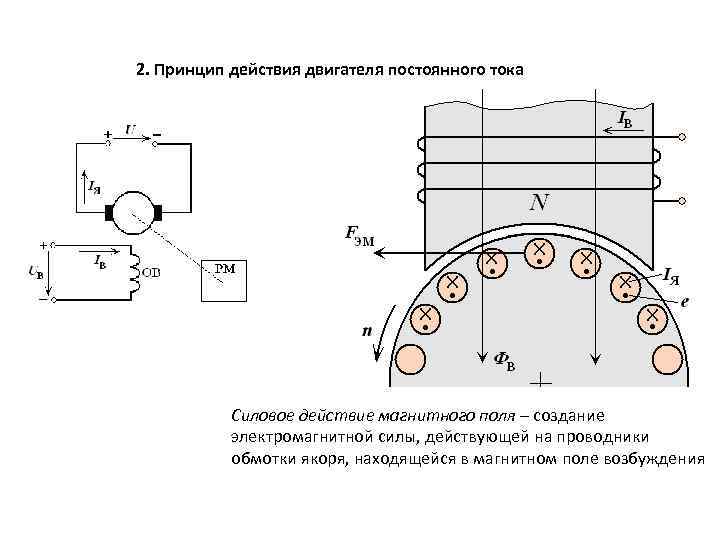
Принцип работы
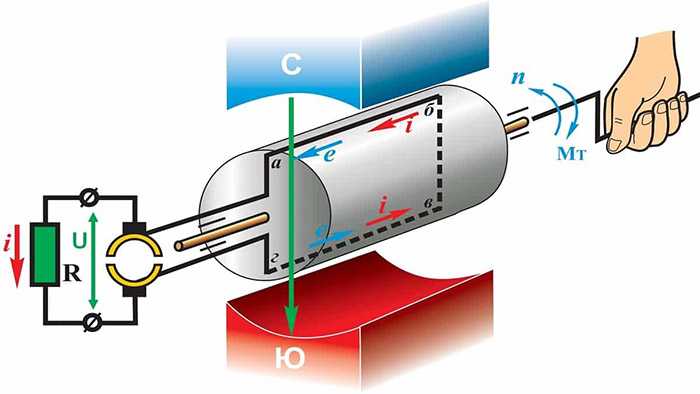
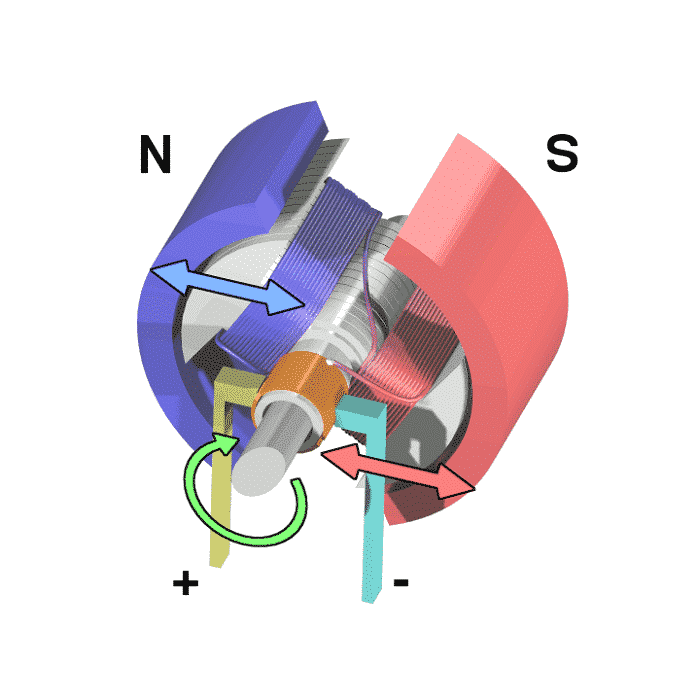
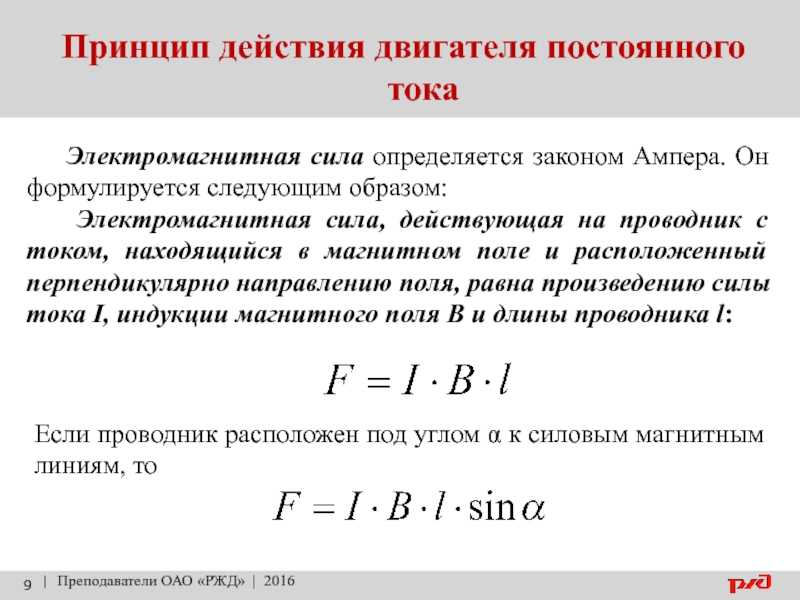
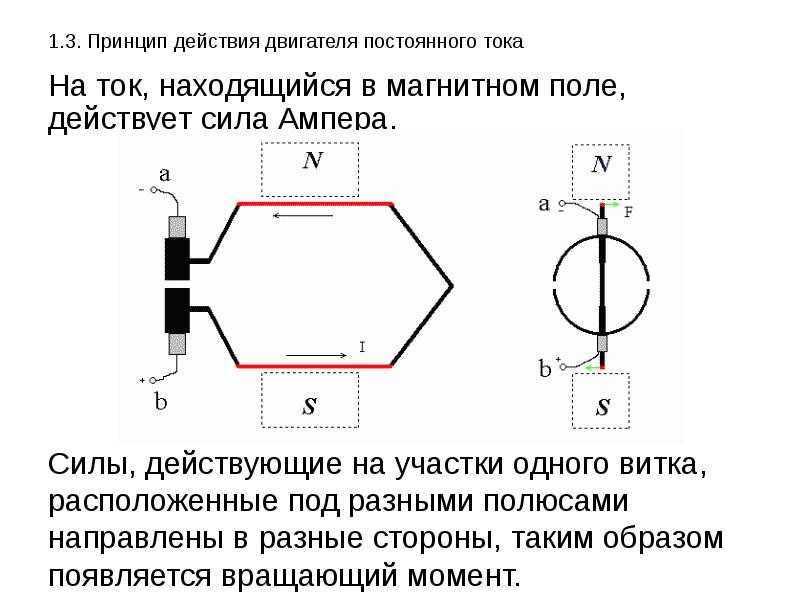
На провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами.
Схематически принцип работы изображён на рис. 6.
Рис. 6. Принцип работы ДПТ
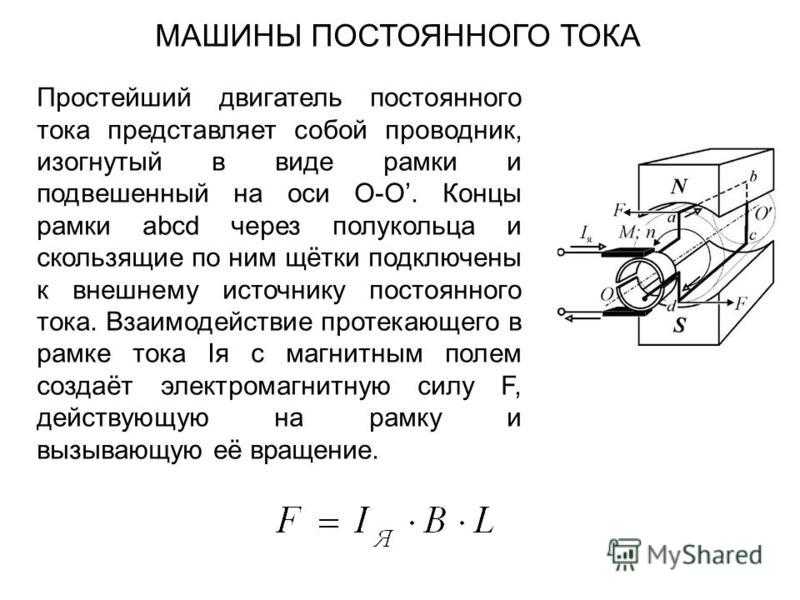
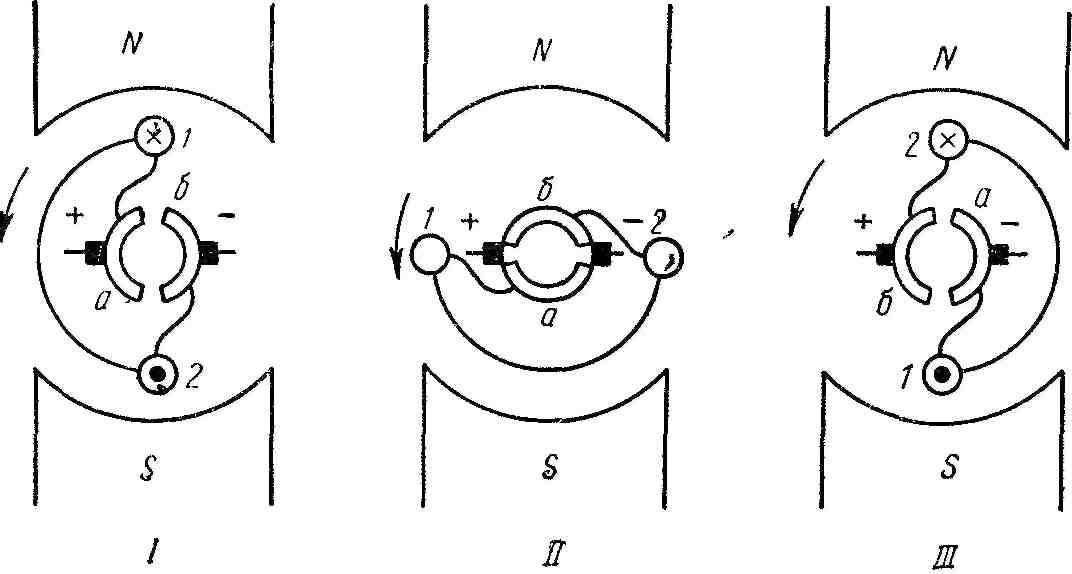
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.





