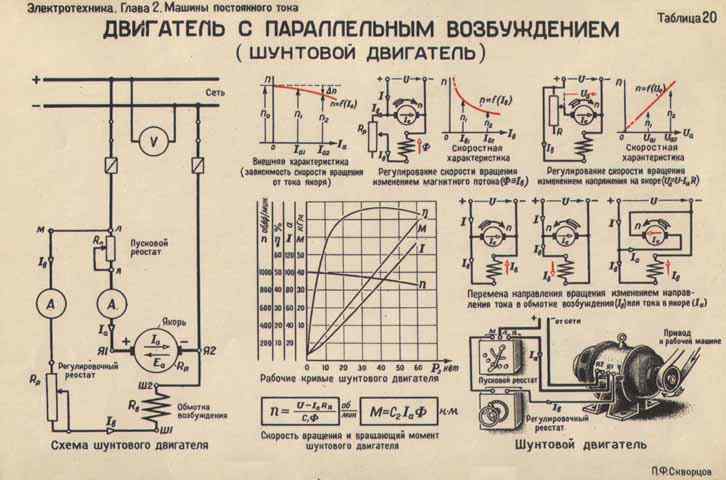
Разновидности подходов к регулированию частоты вращения
Для агрегатов параллельного типа используются способы управления скоростью функционирования изменением:
- магнитного потока главных полюсов,
- сопротивления цепи якоря,
- подаваемого на него напряжения.
Объектом воздействия являются обмотка возбуждения, обмотка якоря, его рабочее напряжение.
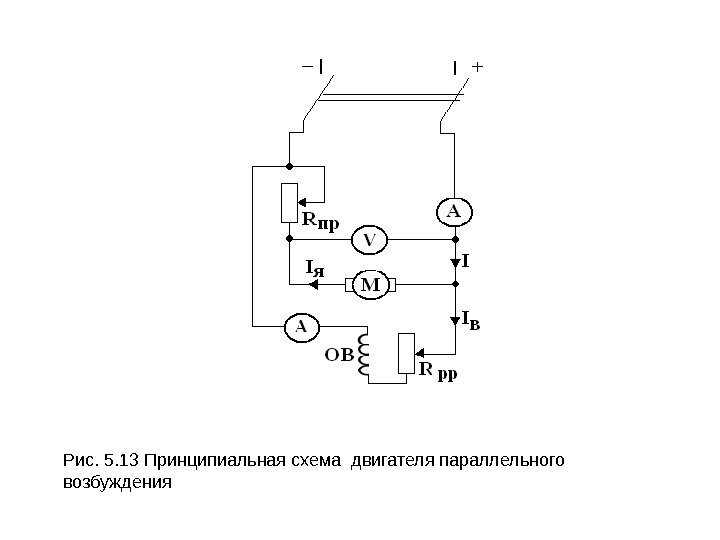
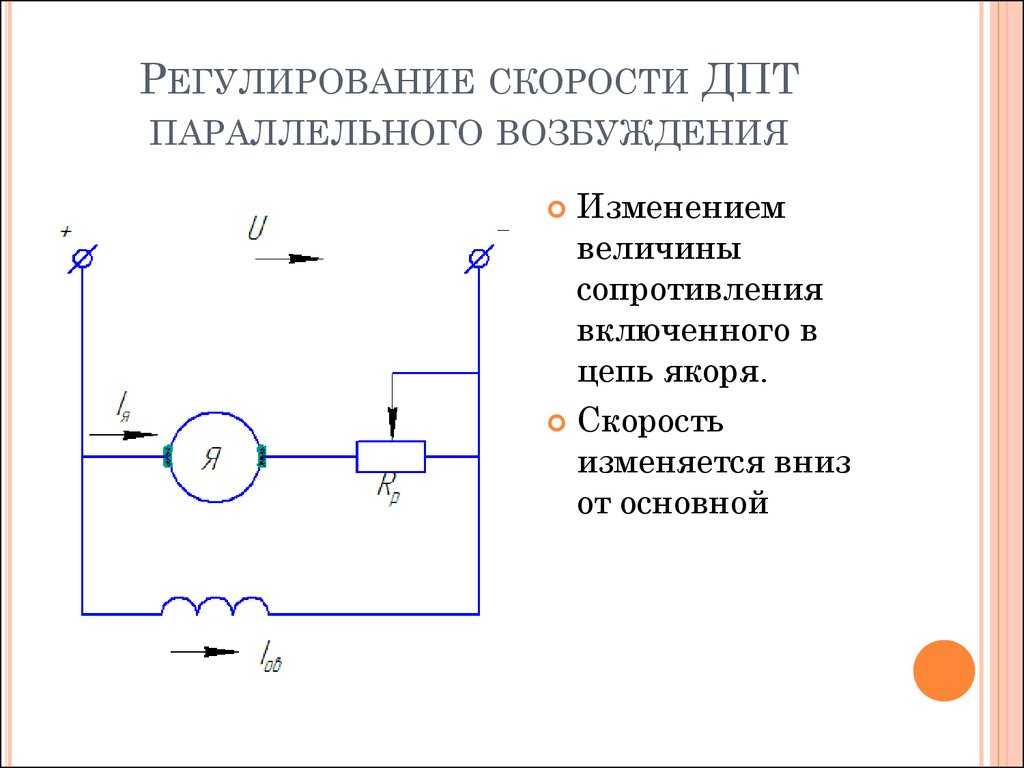
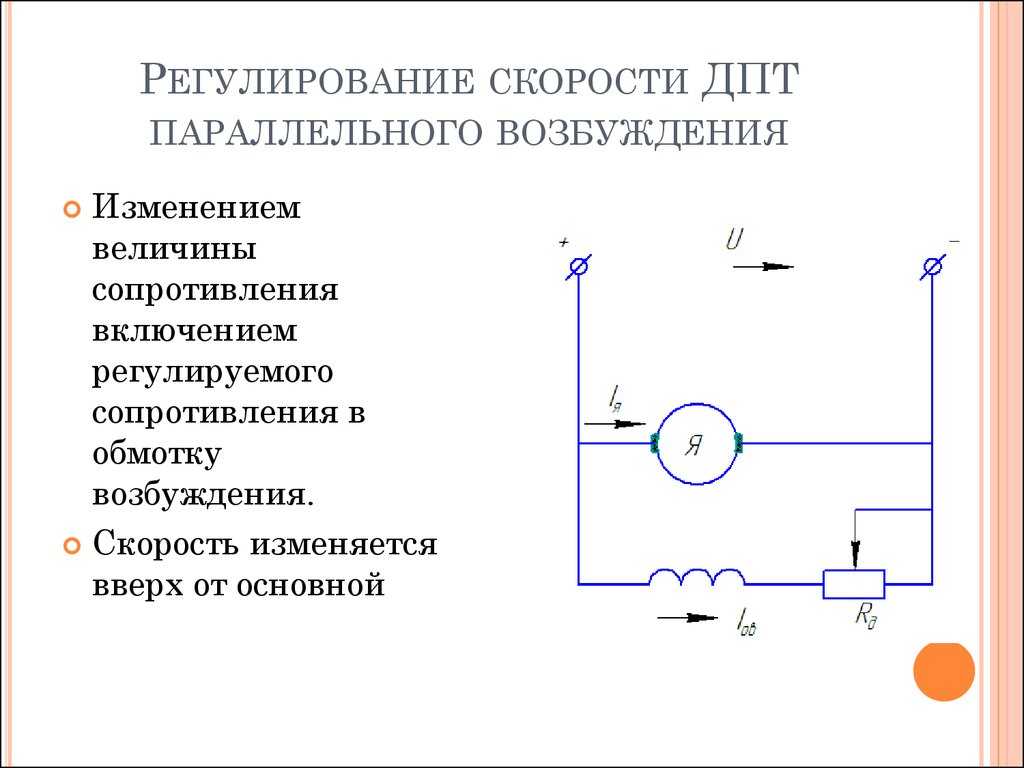
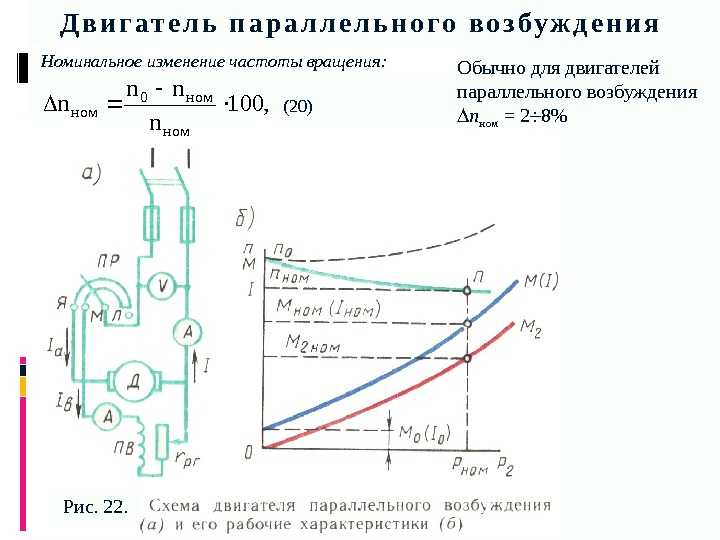
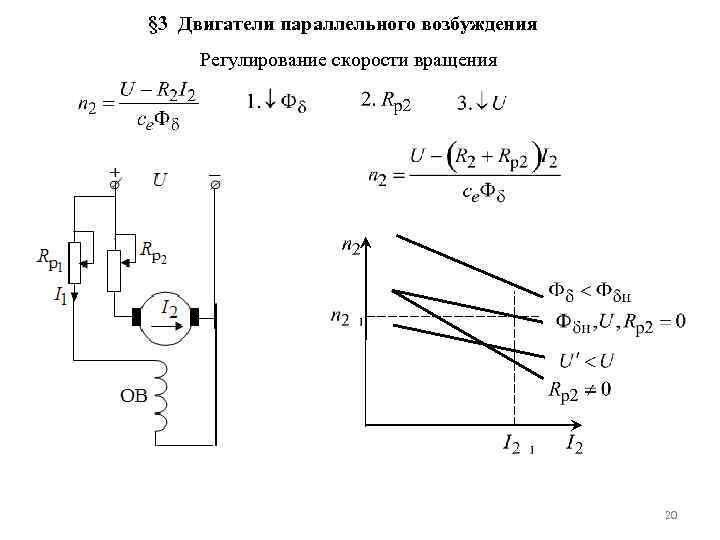
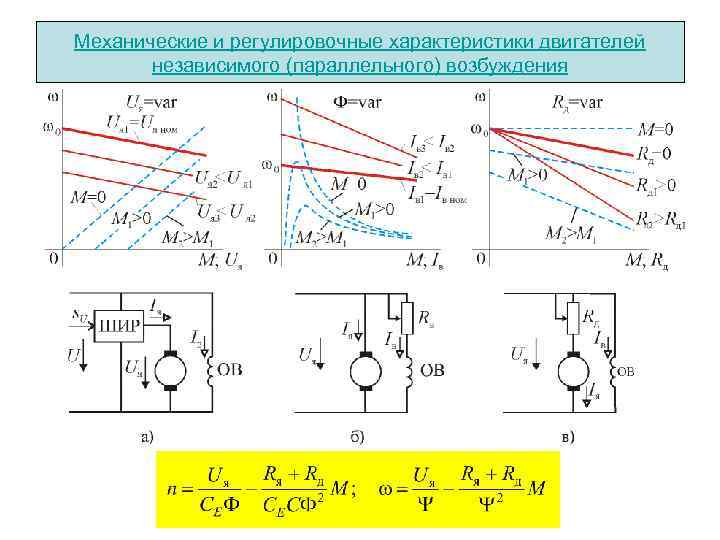
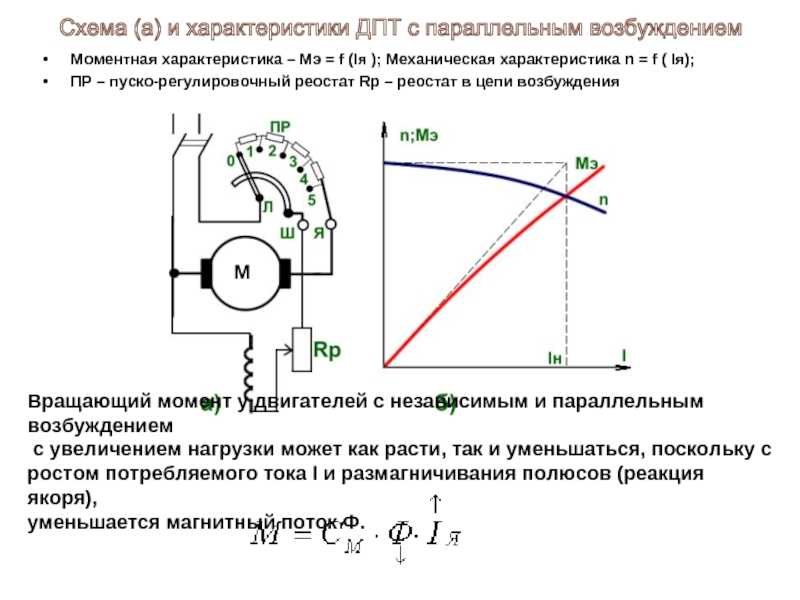
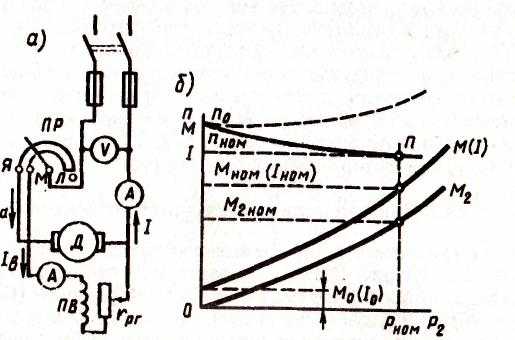
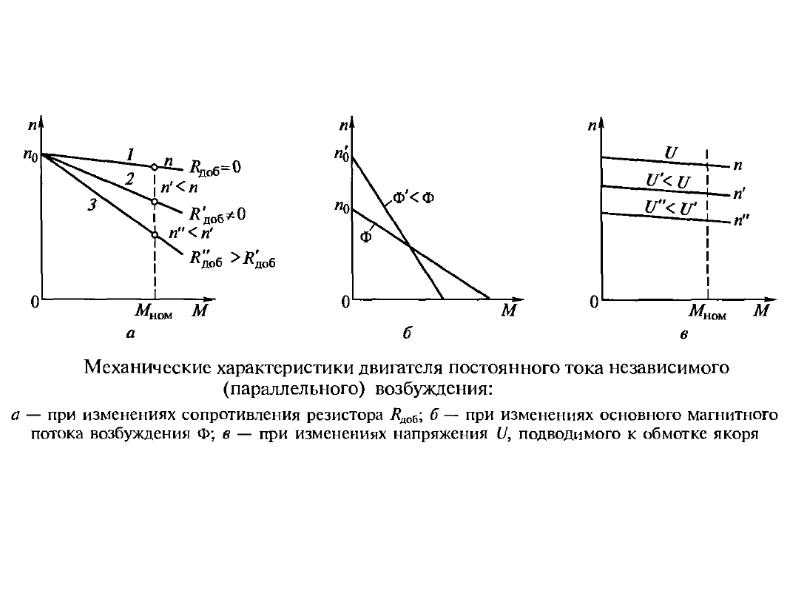
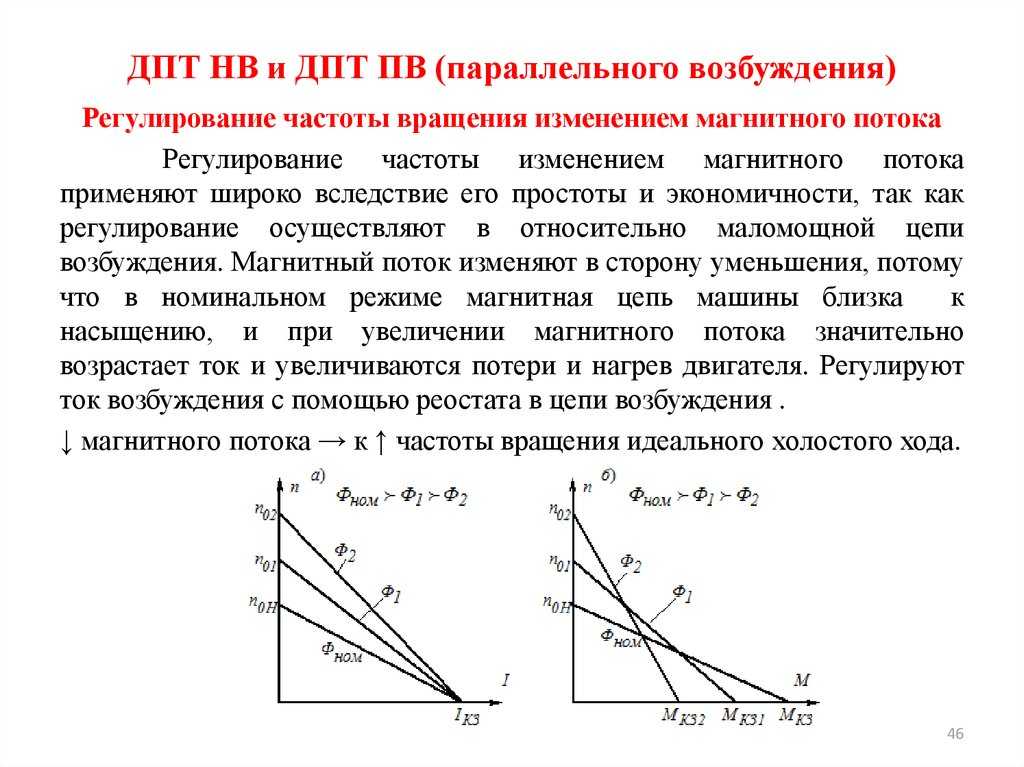
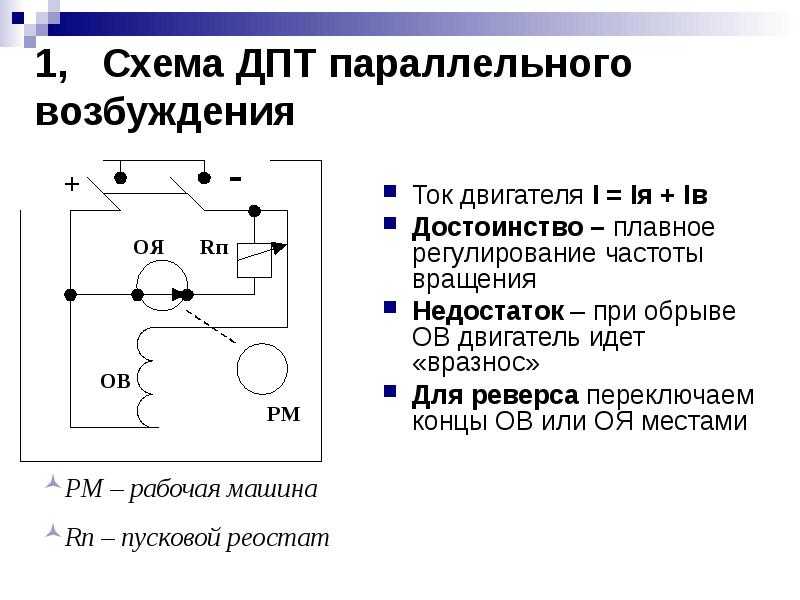
Изменение магнитного потока осуществляется с помощью последовательного реостата RР. При увеличении его сопротивления ОВ пропускает меньший ток, что сопровождается уменьшением магнитного потока. Внешним проявлением такого действия становится наращивание оборотов Я на холостом ходу. Исследование показывает, что происходит увеличение угла наклона характеристики.
https://youtube.com/watch?v=6hZe2Eyk6_Q
Второй принцип основан на включении в цепь питания якоря дополнительного последовательного регулировочного реостата. При увеличении его сопротивления скорость вращения Я уменьшается, тогда как его естественная механическая характеристика приобретает больший наклон. Из-за последовательного включения с основной обмоткой реостата дополнительного сопротивления, на котором рассеивается значительная мощность, происходит заметное падение экономичности.
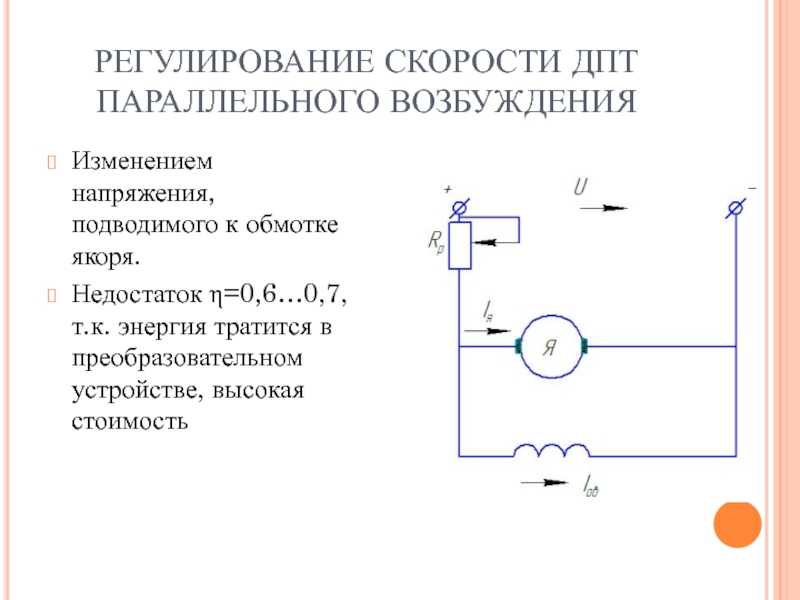
Третий принцип сопровождается определенным усложнением схемных решений и требует применения отдельного регулируемого источника питания с сохранением возможности раздельного регулирования. В случае его применения в реальных условиях возможно только уменьшение частоты вращения вала.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
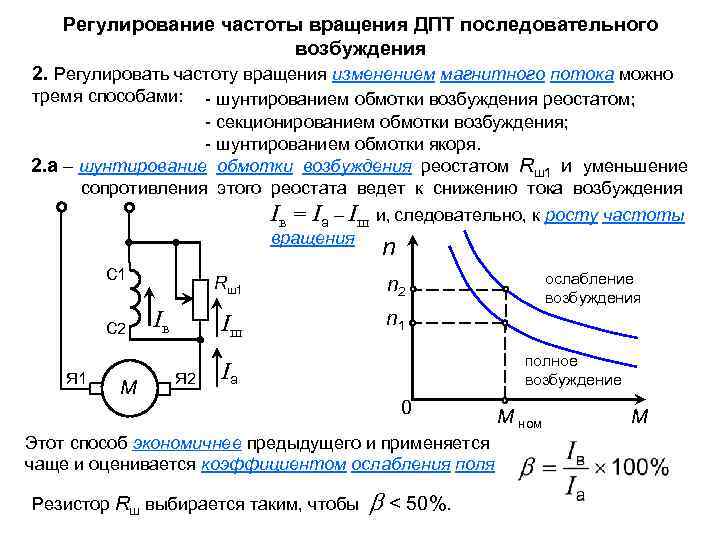
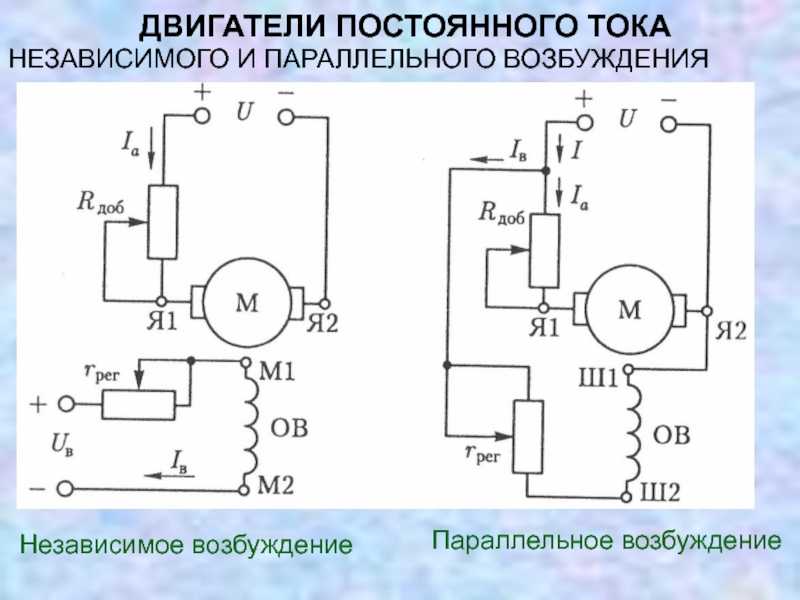
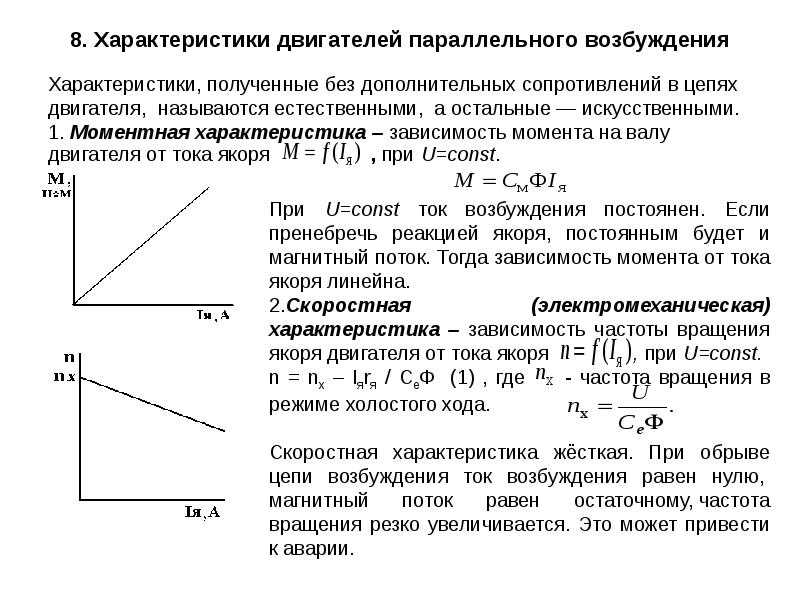
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Прямой пуск
Данный метод основан на прямом подключении якорной обмотки к электрической сети при номинальном напряжении двигателя. Прямой пуск можно применять только в случае наличия стабильного питания мотора, жестко связанного с приводом.
Этот способ является одним из самых простых. Температура при прямом пуске повышается, по сравнению с прочими способами, незначительно.
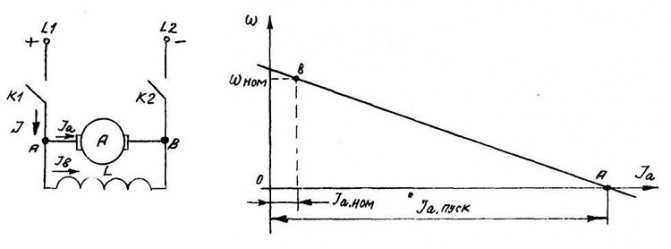
Схема прямого пуска
Метод прямого пуска наиболее предпочтителен при отсутствии специальных ограничений на ток, поступающий от электросети.
Если электродвигатель работает в режиме частых запусков и отключений, его необходимо снабдить простейшим оборудованием. Его роль может выполнять расцепитель с ручным управлением. Напряжение в этом случае подается на клеммы электромотора.
Прямой пуск можно применять только на маломощных двигателях, поскольку пик нагрузки а крупных моделях может превышать номинальную нагрузку в 50 раз.
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.

Расчет электрической величины в этом случае будет производиться по формуле:
I = U / (Rобм + Rреостата)
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
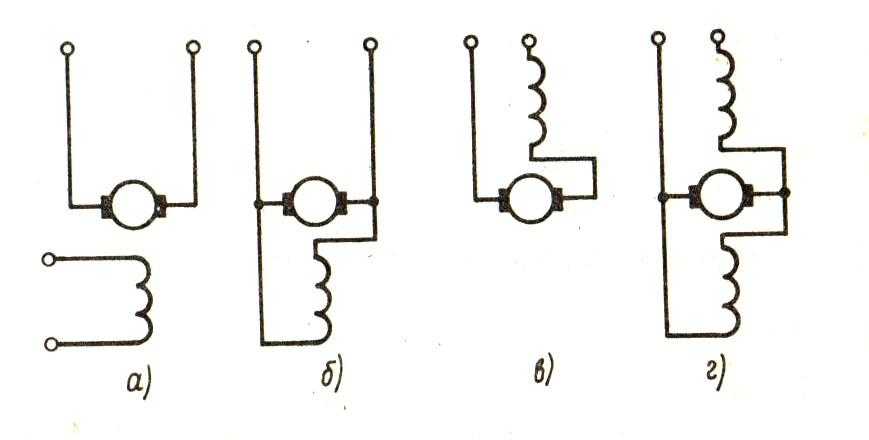
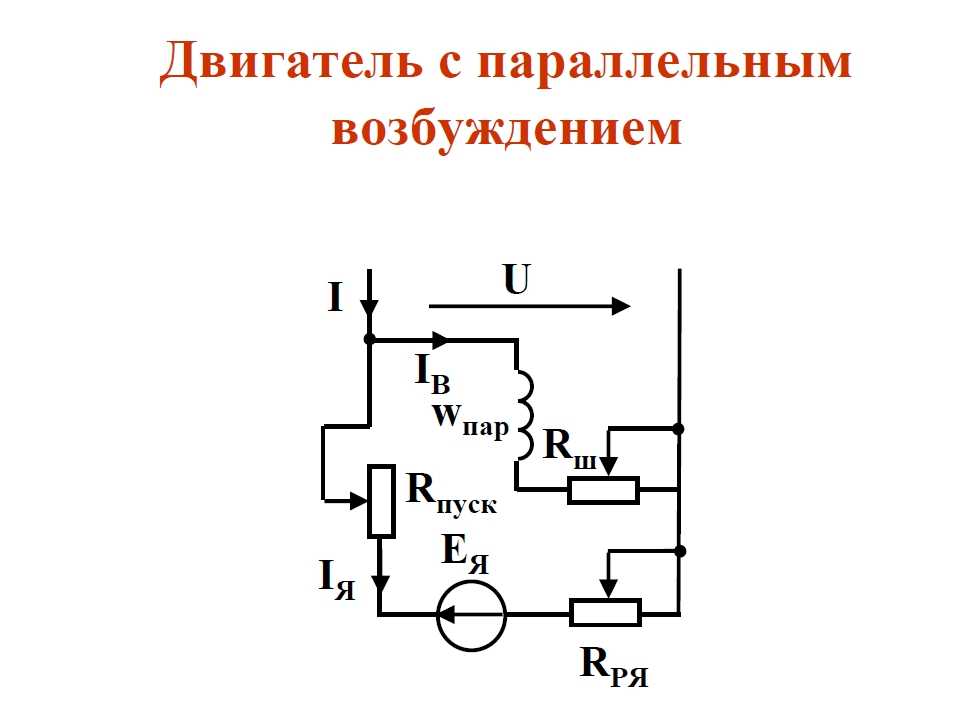
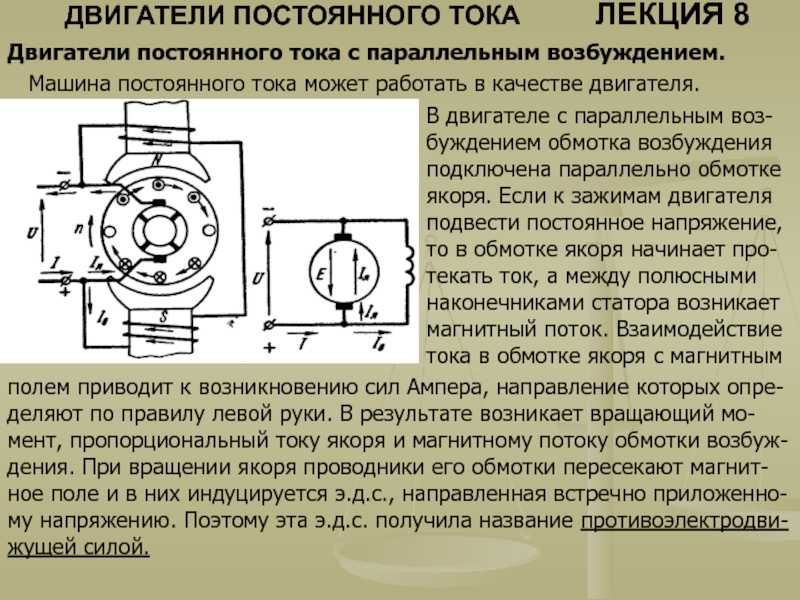
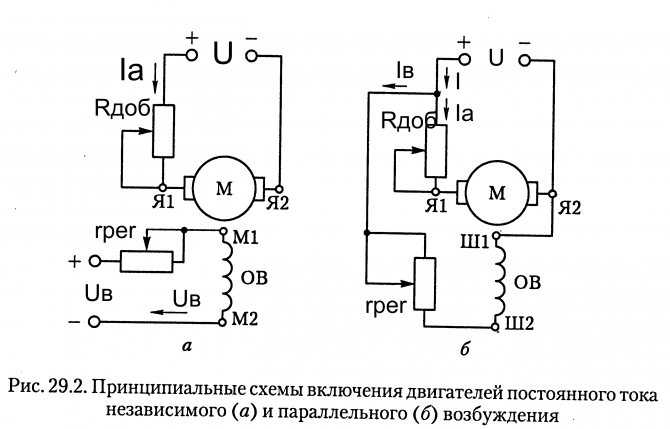
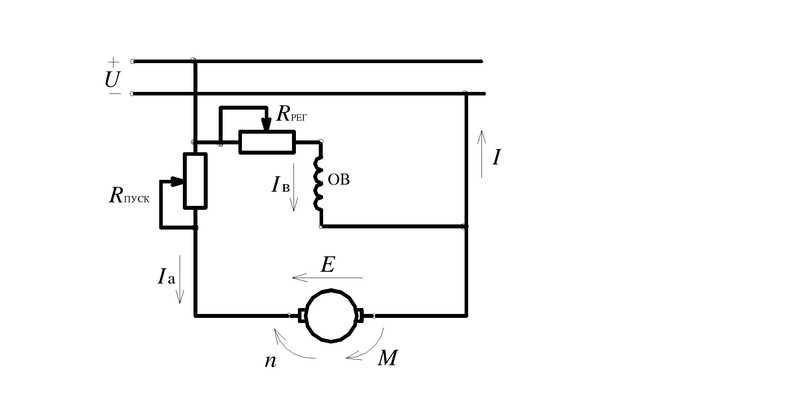
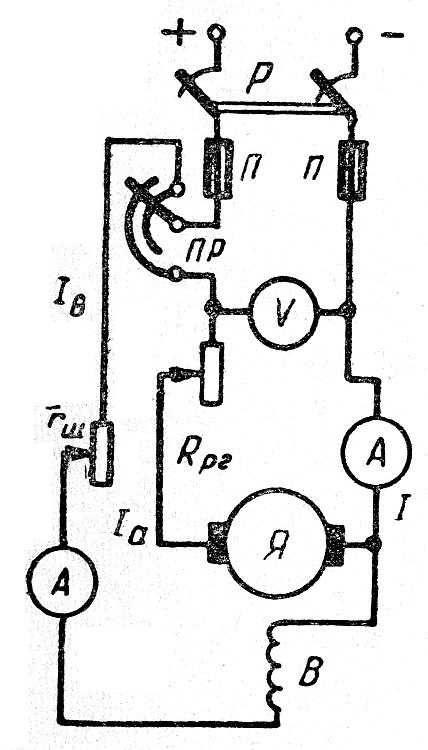
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.
- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.
- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.
Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
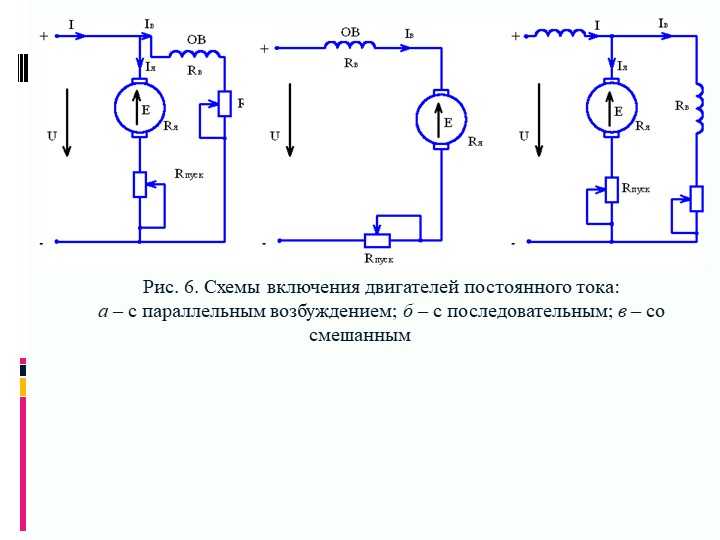
Запуск ДПТ с последовательным возбуждением
Рис. 3. Запуск ДПТ с последовательным возбуждением На рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
Рис. 4. Запуск ДПТ с независимым возбуждением
На схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.


Принцип преобразования энергии
Принцип работы электродвигателя любого типа заключается в использовании электромагнитной индукции, возникающей внутри устройства после подключения в сеть. Для того чтобы понять, как эта индукция создается и приводит элементы двигателя в движение, следует обратиться к школьному курсу физики, объясняющему поведение проводников в электромагнитном поле.
Итак, если мы погрузим проводник в виде обмотки, по которому движутся электрические заряды, в магнитное поле, он начнет вращаться вокруг своей оси. Это связано с тем, что заряды находятся под влиянием механической силы, изменяющей их положение на перпендикулярной магнитным силовым линиям плоскости. Можно сказать, что эта же сила действует на весь проводник.
Схема, представленная ниже, показывает токопроводящую рамку, находящуюся под напряжением, и два магнитных полюса, придающие ей вращательное движение.
Картинка кликабельна.
Именно эта закономерность взаимодействия магнитного поля и токопроводящего контура с созданием электродвижущей силы лежит в основе функционирования электродвигателей всех типов. Для создания аналогичных условий в конструкцию устройства включают:
- Ротор (обмотка) – подвижная часть машины, закрепленная на сердечнике и подшипниках вращения. Она исполняет роль токопроводящего вращательного контура.
- Статор – неподвижный элемент, создающий магнитное поле, воздействующее на электрические заряды ротора.
- Корпус статора. Оснащен посадочными гнездами с обоймами для подшипников ротора. Ротор размещается внутри статора.
Для представления конструкции электродвигателя можно создать принципиальную схему на основе предыдущей иллюстрации:
После включения данного устройства в сеть, по обмоткам ротора начинает идти ток, который под воздействием магнитного поля, возникающего на статоре, придает ротору вращение, передаваемое на крутящийся вал. Скорость вращения, мощность и другие рабочие показатели зависят от конструкции конкретного двигателя и параметров электрической сети.
Работа машины постоянного тока в режиме генератора
§ 110. РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА В РЕЖИМЕ ГЕНЕРАТОРА Якорь генератора приводится во вращение каким-либо двигателем, развивающим вращающий момент М1. При перемещении проводников обмотки якоря в магнитном поле полюсов в них индуктируется э.д.с, направление которой определяется правилом правой руки (рис. 142). Если якорь вращается с числом оборотов в минуту п, то в его обмотке индуктируется э. д. с.
Если обмотку якоря через щетки замкнуть на какой-либо приемник энергии г (сопротивление нагрузки), то через этот приемник и обмотку якоря будет протекать ток Iя, который в обмотке якоря имеет направление, совпадающее с направлением э.д.с. В результате взаимодействия этого тока с магнитным полем полюсов создается электромагнитный момент Мэ, направление которого определяется правилом левой руки.
Таким образом, развиваемый машиной электромагнитный момент является тормозным, направленным встречно направлении вращения якоря машины, так что для вращения последнего первичный двигатель должен развивать вращающий момент М1 достаточный для преодоления электромагнитного тормозного момента,
следовательно, машина потребляет механическую энергию.
В случае равновесия моментов, т. е. М1== Мэ, якорь машины вращается с неизменно скоростью. При нарушении равновесия моментов число оборотов якоря начнет изменяться. Если почему-либо момент первичного двигателя уменьшится, т. е. станет меньше электромагнитного момента генератора (М1 Мэ) число оборотов якоря, а также э. д. с. и ток в его обмотке будут увеличиваться, что вызывает увеличение тормозного электромагнитного момента.
При нарушении равновесия моментов число оборотов якоря, э.д.с. и ток в его обмотке претерпевают изменения до восстановления равновесия моментов, т. е. пока электромагнитный момент генератора не станет равным вращающему моменту первичного двигателя.
Таким образом, любое изменение момента первичного двигателя, т. е. потребляемой генератором мощности, вызывает соответствующее изменение как электромагнитного момента генератора, так и вырабатываемой им мощности. Так же при изменениях нагрузки генератора потребуется соответствующее изменение момента первичного двигателя для поддержания постоянства числа оборотов якоря генератора.
Ток обмотки якоря Iя, протекающий при нагрузке генератора, встречает на своем пути сопротивление внешней нагрузки rн, сопротивление обмотки якоря rоб и сопротивление переходных контактов между щетками и коллектором rщ. Обозначив через rя внутреннее сопротивление машины, представляющее собой сумму сопротивлений обмотки якоря и щеточных контактов (rоб+rщ), для тока в якоре можем записать следующее выражение:
Сопротивление rщ непостоянно и зависит от большого числа факторов, как-то: величины и направления тока, состояния коллектора, силы нажатия щеток на коллектор, скорости вращения, радение напряжения в щеточных контактах остается примерно нанесенным при изменениях нагрузки (принимается равным 2 в на пару угольных и графитных щеток).
Поэтому внутреннее сопротивление машины rя также не являйся величиной постоянной при изменении нагрузки генератора.
Так как Iяrн=U, где (U— напряжение на зажимах генератора при нагрузке, то получим следующее уравнение равновесия э.д.с. лля генератора:

Из уравнения равновесия э.д.с. легко получить уравнение мощностей, т. е.
где Р2 — полезная мощность генератора, отдаваемая потребителю электрической энергии,
Рэ— внутренняя или электромагнитная мощность генератора, преобразованная им в электрическую,
Роб —потери мощности в обмотке якоря и щеточных контактах.
При холостом ходе генератора электромагнитная мощность равна нулю (Рэ=0), но для вращения якоря машины первичный двигатель должен затратить некоторую мощность Р, расходуемую на покрытие потерь холостого хода. Мощность Р складывается из потерь механических на трение в подшипниках и трение о воздух вращающихся частей машины Рмех и из потерь в стали на
гистерезис и вихревые токи Pст.В генераторах с самовозбуждением мощность Р включает также мощность, затраченную на создание магнитного потока, т. е. на возбуждение машины.
При нагрузке генератора первичный двигатель затрачивает мощность Р1 = Рэ + Ро.
Электромагнитный момент машины
где
— угловая скорость якоря.
то электромагнитный момент машины определится следующим выражением:
Величины а, р
иN постоянны для данной машины, поэтому выражение представляет собой некоторый постоянный для данной машины коэффициент и электромагнитный момент равен:
Принцип работы стартера
Принцип работы стартера в двух словах можно описать так:
При нажатии на исполнительное устройство (в качестве которого может выступать: кнопка, ключ зажигания…) питание от АБ через реле стартера подается на обмотку тягового реле 5. Якорь тягового реле под воздействием силы электромагнитной индукции смещается, замыкая контактной пластиной «пяткой»7 силовые контакты 8, одновременно перемещая через рычаг 4 шестерню 3 (бендикс) и переводя ее в зацепление с маховиком 12 двигателя. При замыкании контактов 8 питание от АБ поступает на обмотку стартера 9, приводя во вращение якорь и соответственно шестерню вошедшую в зацепление с венцом маховика, которая проворачивает коленчатый вал двигателя через маховик, запуская двигатель. После начала работы двигателя, (что определяется либо частотой вращения двигателя, либо временем задержки вращения стартера) питания на реле стартера снимается и механизм привода выводит шестерню стартера из зацепления с зубчатым венцом маховика.
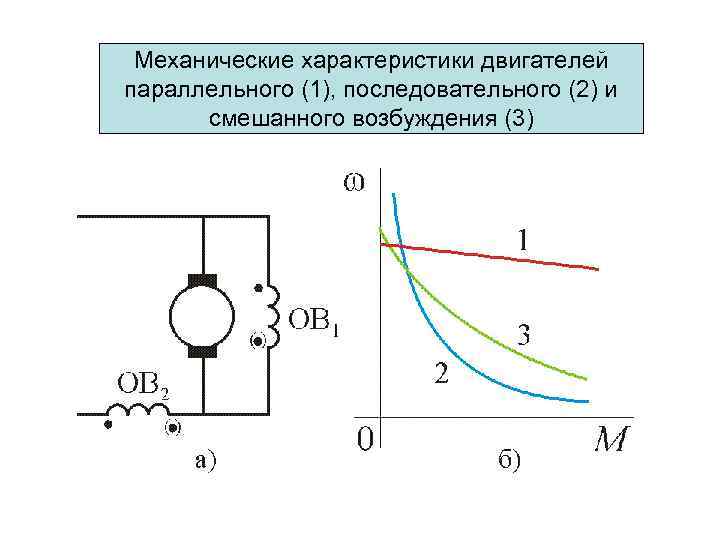
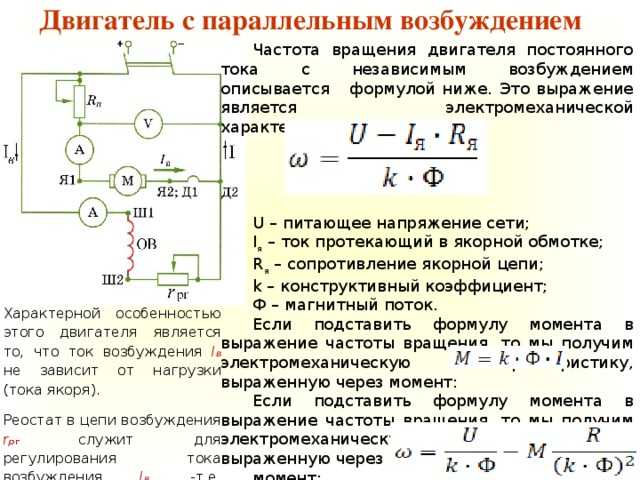
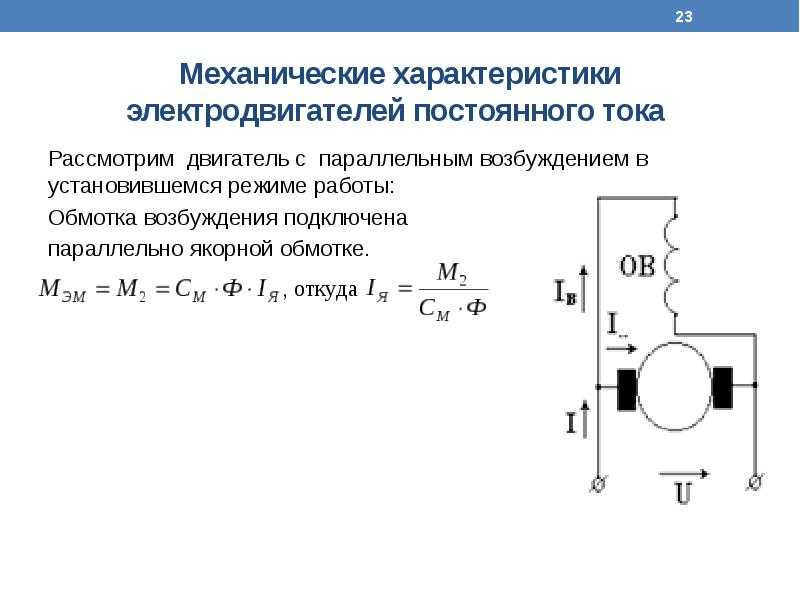
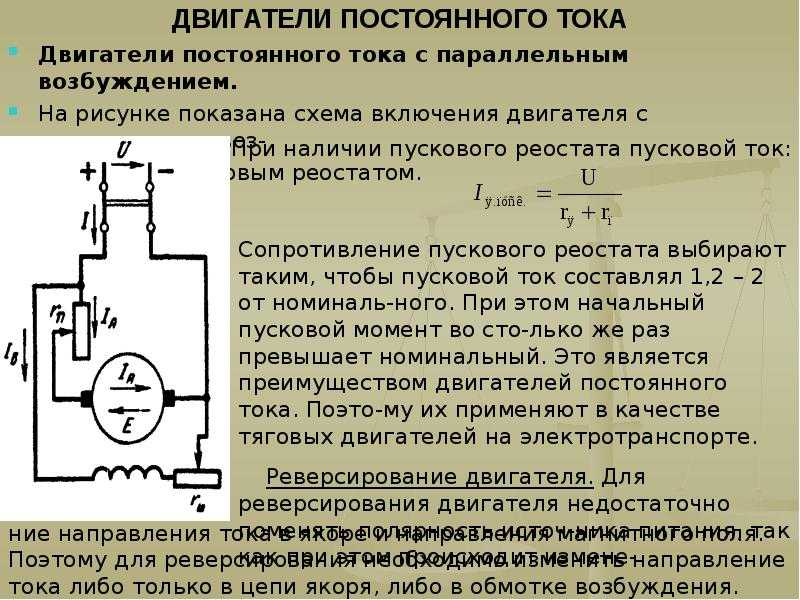
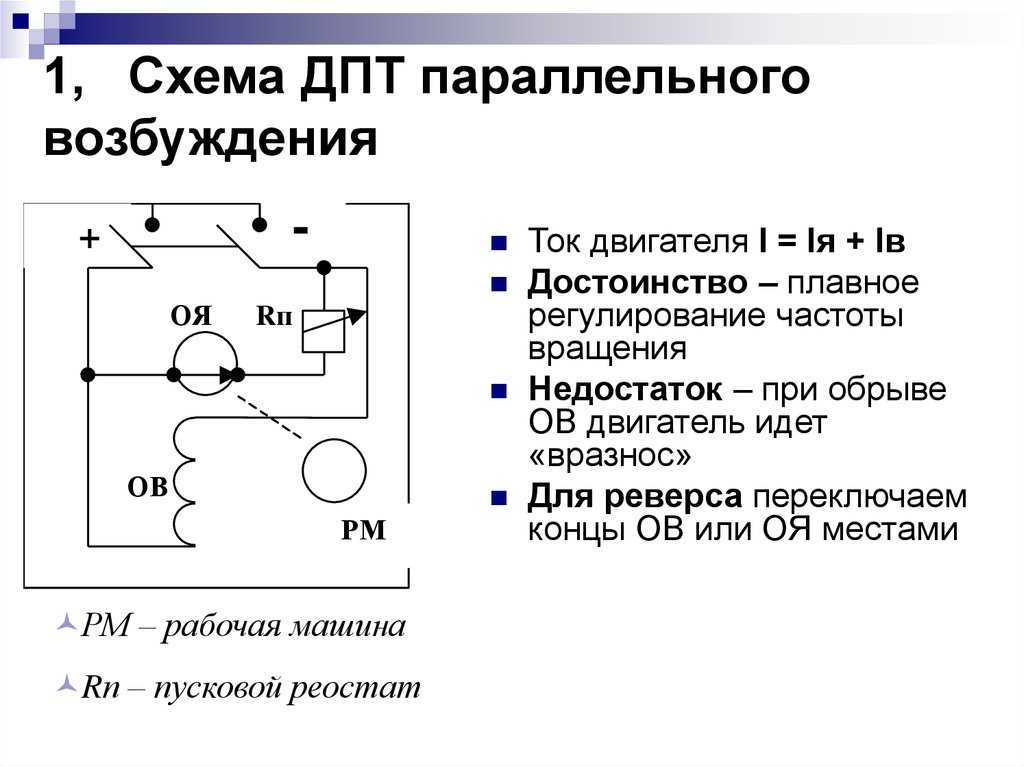
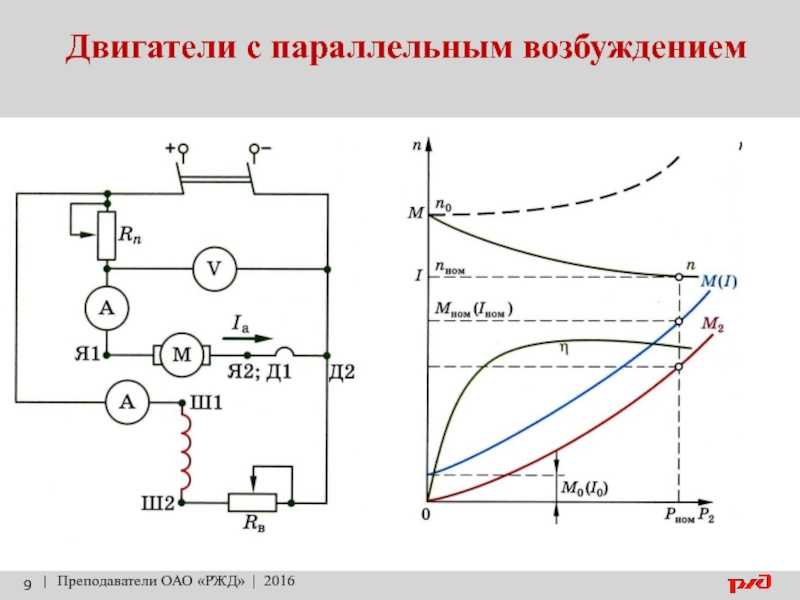
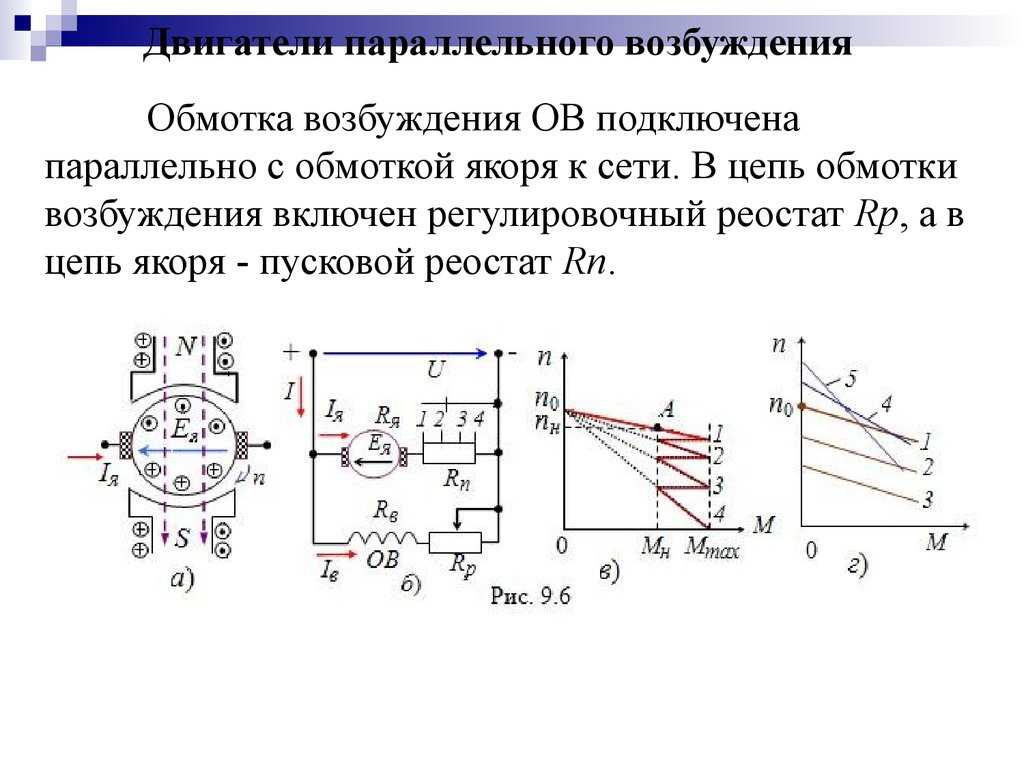
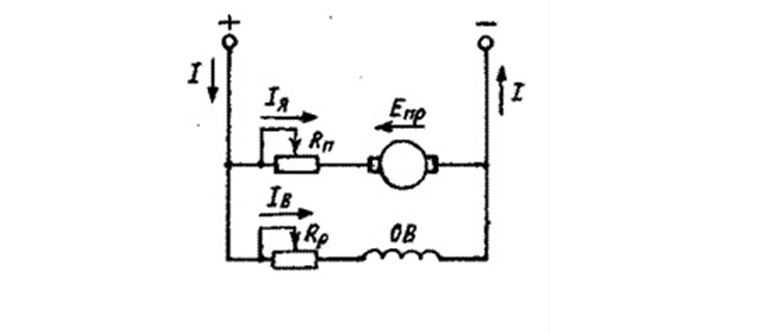
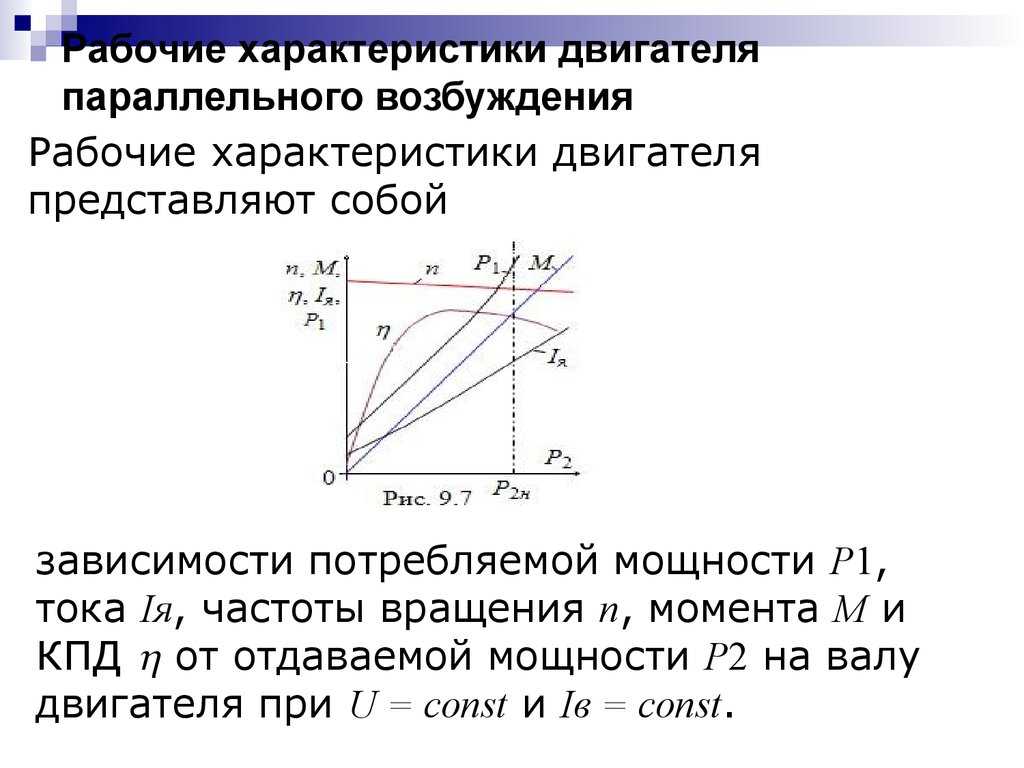
Характеристики двигателя постоянного тока с параллельным возбуждением
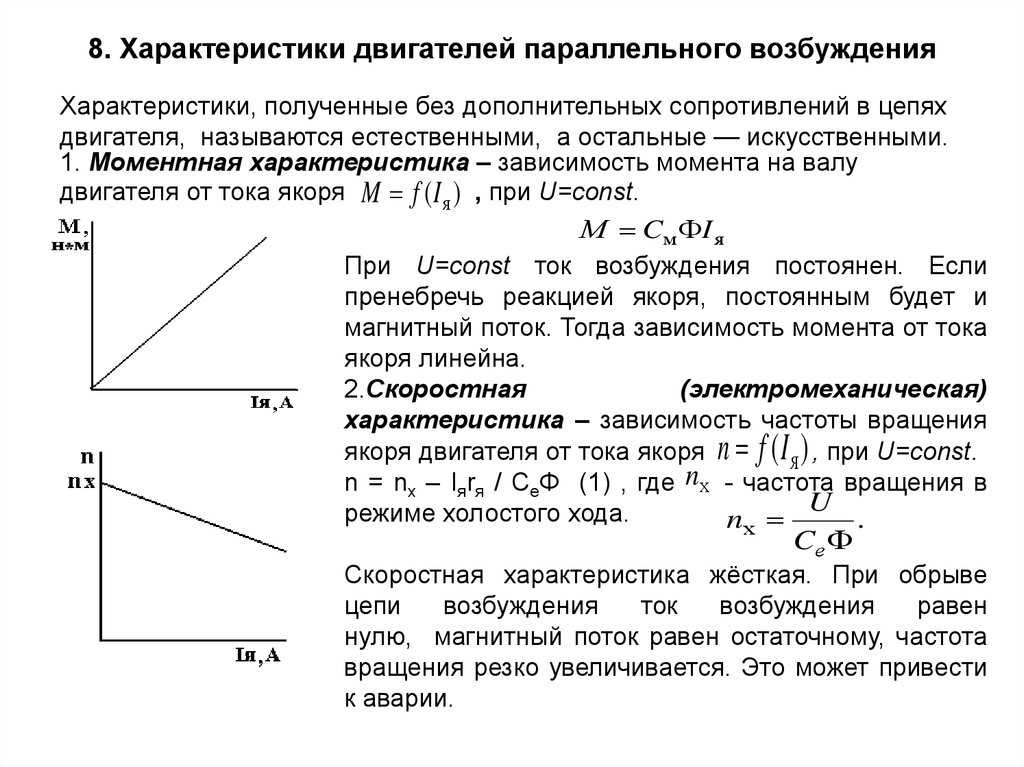
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Электродвигатели постоянного тока. Устройство и работа. Виды
Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов.
Устройство и принцип работы
Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность.
Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом.
Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы.
7.6. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ
Простейшим усилителем мощности является обычный генератор постоянного
тока с независимым возбуждением. Коэффициент усиления машины определяется
отношением тока, протекаемого в обмотке якоря, к току возбуждения:
В таком исполнении коэффициент усиления равен порядка 15 — 30.
Усилительную способность генератора можно увеличить, если использовать
каскадную схему включения генераторов. В этом случае с выхода первого
генератора подключается обмотка возбуждения второго, а выход со второго
генератора будет превышать по мощности вход первого в 1000 и более раз.
Каскадная схема применяется редко из-за своей громоздкости и дороговизны.
Чаще используют так называемые электромашинные усилители (ЭМУ). Элек-трическая
схема ЭМУ приведена на рис. 7.6.1.
Конструктивно электромашинный усилитель представляет собой коллекторную
машину постоянного тока с независимым возбуждением, имеющую два комплекта
щеток (продольные 1-1′ и поперечные 2-2′).
Ток, протекающий по обмотке возбуждения Iв, создает продольный магнитный
поток Фd, направленный по оси полюсов машины. При вращении якоря на
поперечных щетках 2-2′ появляется ЭДС Е2 = С n Фd
Так как они замкнуты накоротко, то в обмотке якоря появляется большой
ток I2. Этот ток создает в обмотке якоря сильное поперечное
магнитное поле реакции якоря Фq, неподвижное в пространстве
и направленное по оси щеток 2-2′. Под действием магнитного потока Фq
в якорной обмотке ме-жду щетками 1-1′ возникает ЭДС Е1 =
С n Фq >>Е2, так как Фq >>Фd.
При подключении к щеткам 1-1′ нагрузки Rн в цепи потечет
ток Iя превышающий ток Iв в десятки тысяч раз.
Электромашинные усилители применяют для автоматического управления мощными
электродвигателями.
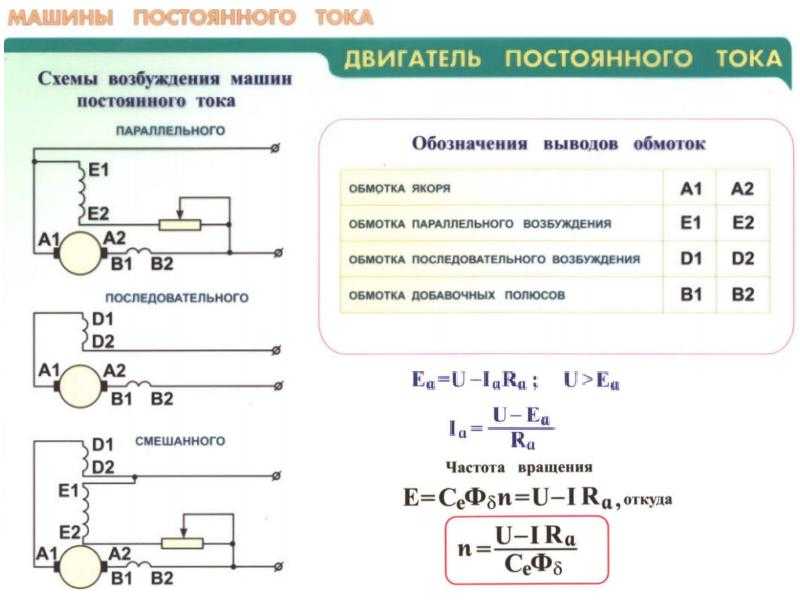
Способы возбуждения машин постоянного тока
Согласно третьему закону электромеханики все электрические машины обратимы. Иначе говоря, они могут работать и как генератор, и как двигатель. Этой способностью электрические машины выгодно отличаются от других преобразователей энергии. Например, от дизельных двигателей или двигателей внутреннего сгорания. Ярким примером работы электромашины в разных режимах является двигатель электровоза. При движении электровоза его двигатель забирает электроэнергию из сети, как и любой другой электродвигатель. Но при торможении он наоборот отдает электроэнергию в сеть. То есть, работает в генераторном режиме.
Электрические машины постоянного тока тоже не являются исключением из этого правила. К примеру, если по обмоткам возбуждения и якоря пропустить постоянный ток, то ротор будет вращаться. (Чем отличается ротор от якоря можно прочитать здесь .) То есть, электрическая машина постоянного тока в данном случае будет электродвигателем.
Однако, если к обмотке возбуждения подключить источник постоянного тока и при этом вращать ротор, то в обмотке якоря создается переменная ЭДС. Иначе говоря, по обмотке якоря начинает протекать переменный электрический ток . Это ток снимают посредством проводников с щетками подключенными к контактным кольцам ротора. Если контактные кольца заменить полукольцами, то появляется возможность снимать выпрямленный электрический ток. То есть, в этом случае электромашина постоянного тока будет работать в режиме генератора.
Наличие магнитного поля позволяет обеспечивать работу электрических машин. Обычно магнитное поле у машин постоянного тока создается обмоткой возбуждения. Разумеется, что обмотка возбуждения питается постоянным током. От того, каким образом подключается в цепь обмотка возбуждения, по большому счету зависят основные свойства машины постоянного тока. Иначе говоря, электрические машины постоянного тока подразделяются по способу возбуждения.

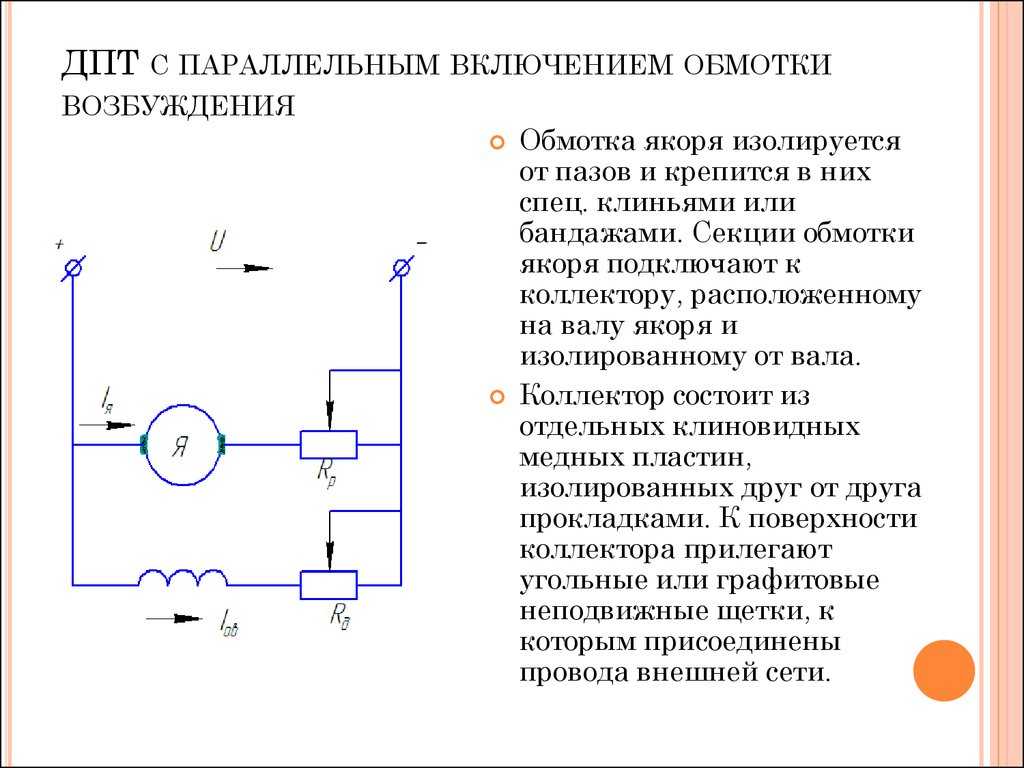
Устройство и принцип работы
ДПТ по своему строению напоминает синхронный электродвигатель переменного тока, разница между ними только в типе потребляемого тока. Двигатель состоит из неподвижной части – статора или индуктора, подвижной части – якоря и щеточноколлекторного узла. Индуктор может быть выполненным в виде постоянного магнита, если двигатель маломощный, но чаще он снабжается обмоткой возбуждения, имеющей два или больше полюса. Якорь состоит из набора проводников (обмоток), закрепленных в пазах. В простейшей модели ДПТ использовались только один магнит и рамка, по которой проходил ток. Такую конструкцию можно рассматривать только в качестве упрощенного примера, тогда как современная конструкция – это усовершенствованный вариант, имеющий более сложное устройство и развивающий необходимую мощность.Принцип работы ДПТ основан на законе Ампера: если в магнитное поле поместить заряженную проволочную рамку, она начнет вращаться. Ток, проходя по ней, образует вокруг себя собственное магнитное поле, которое при контакте с внешним магнитным полем начнет вращать рамку. В случае с одной рамкой вращение будет продолжаться, пока она не займет нейтральное положение параллельно внешнему магнитному полю. Чтобы привести систему в движение, нужно добавить еще одну рамку. В современных ДПТ рамки заменены якорем с набором проводников. На проводники подается ток, заряжая их, в результате чего вокруг якоря возникает магнитное поле, которое начинает взаимодействовать с магнитным полем обмотки возбуждения. В результате этого взаимодействия якорь поворачивается на определенный угол. Далее ток поступает на следующие проводники и т.д.
Для попеременной зарядки проводников якоря используются специальные щетки, выполненные из графита или сплава меди с графитом. Они играют роль контактов, которые замыкают электрическую цепь на выводы пары проводников. Все выводы изолированы между собой и объединены в коллекторный узел – кольцо из нескольких ламелей, находящееся на оси вала якоря. Во время работы двигателя щетки-контакты поочередно замыкают ламели, что дает возможность двигателю вращаться равномерно. Чем больше проводников имеет якорь, тем более равномерно будет работать ДПТ.Двигатели постоянного тока делятся на:
— электродвигатели с независимым возбуждением;
— электродвигатели с самовозбуждением (параллельные, последовательные или смешанные).
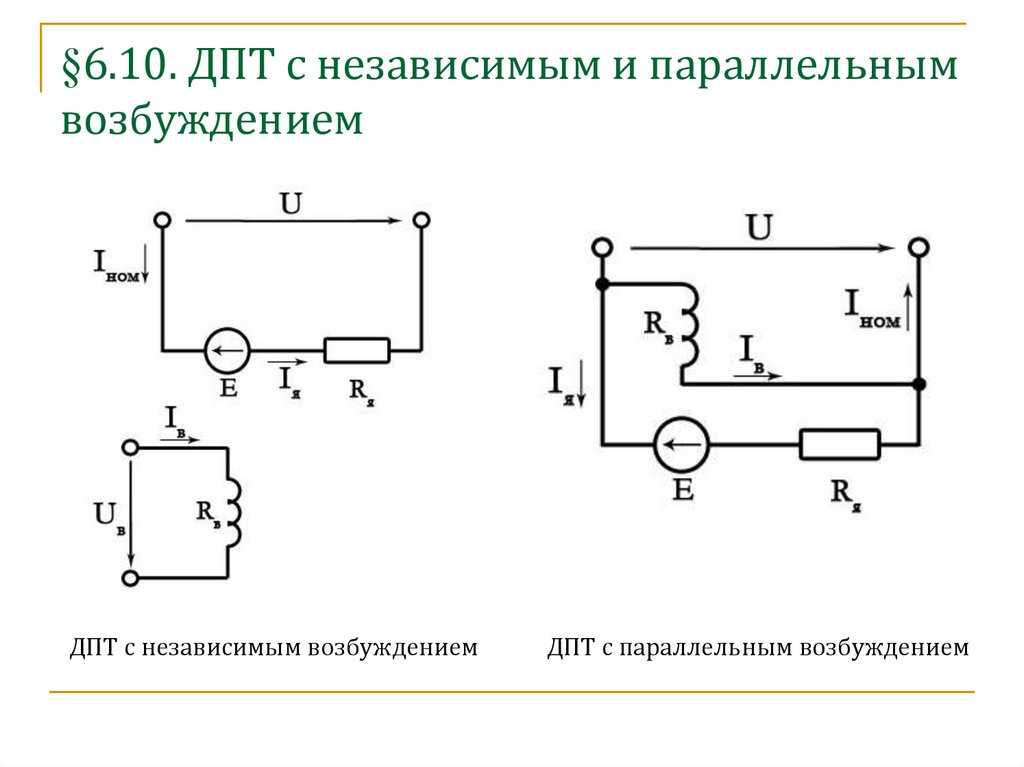
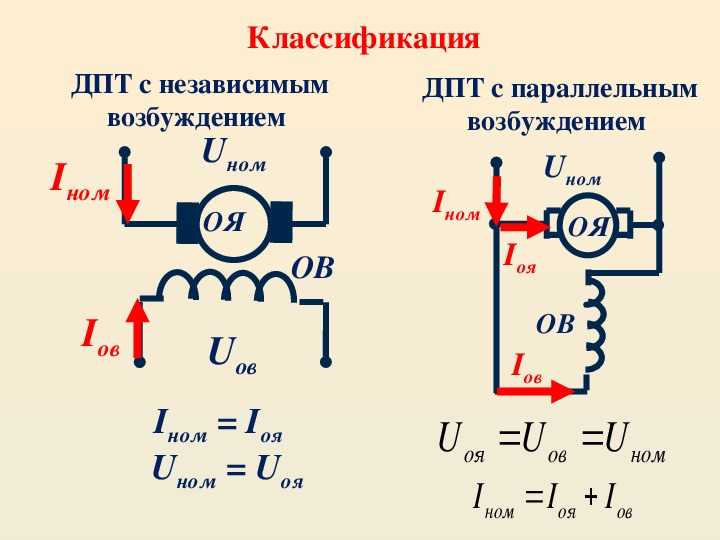
Схема ДПТ с независимым возбуждением предусматривает подключение обмотки возбуждения и якоря к разным источникам питания, так что между собой они не связаны электрически.
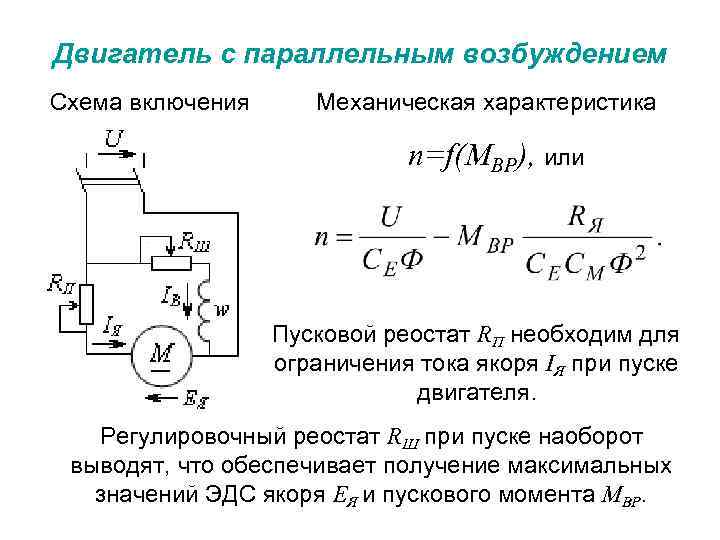
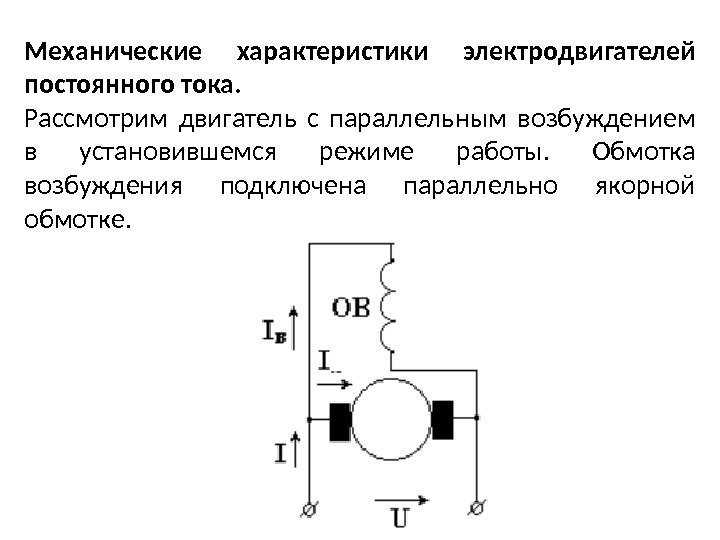
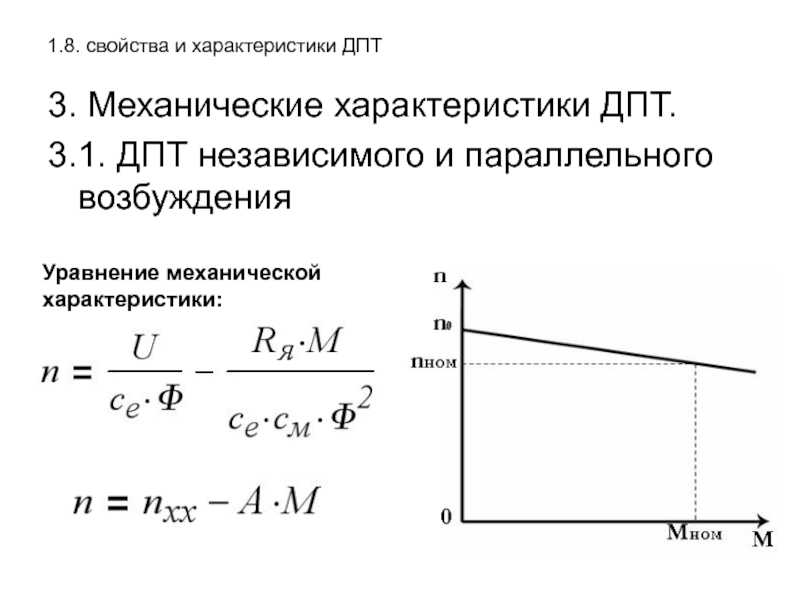
Параллельное возбуждение реализовывается путем параллельного подключения обмоток индуктора и якоря к одному источнику питания. Двигатели этих двух типов обладают жесткими рабочими характеристиками. У них частота вращения рабочего вала не зависит от нагрузки, и ее можно регулировать
Такие двигатели нашли применение в станках с переменной нагрузкой, где важно регулировать скорость вращения вала
При последовательном возбуждении якорь и обмотка возбуждения подключены последовательно, поэтому значение электрического тока у них одинаковое. Такие двигатели более «мягкие» в работе, имеют больший диапазон регулирования скоростей, но требуют постоянной нагрузки на вал, иначе скорость вращения может достичь критической отметки
У них высокое значение пускового моменты, что облегчает запуск, но при этом скорость вращения вала зависит от нагрузки. Применяются они на электротранспорте: в кранах, электропоездах и городских трамваях.
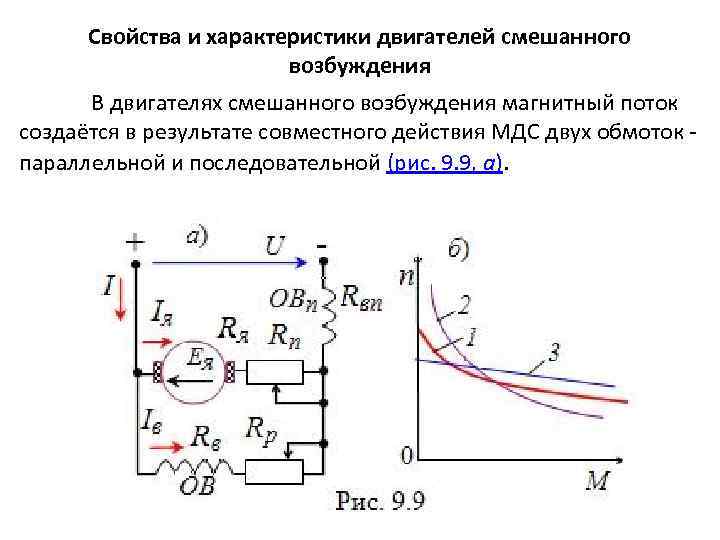
Смешанный тип, при котором одна обмотка возбуждения подключается к якорю параллельно, а вторая – последовательно, встречается редко.