
Управление двигателем постоянного тока
Принципиальная электрическая схема управления электродвигателями постоянного тока с реверсом
Итак, как вы уже поняли, основной принцип работы двигателя постоянного тока заключается в инвертировании направления тока в якорной цепи, иначе бы возникало торможение, приводящее к стопорению мотора. Таким образом, реализуется вращение мотора в одну сторону, но такой режим не единственный, и двигатель можно заставить вращаться в обратном направлении.
Для этого достаточно поменять направление тока в возбуждающей обмотке, или сменить местами щетки, через которые подается питание на обмотку ротора.
Однако это не все моменты, которые требуется регулировать в таком двигателе. Когда вам требуется четко управлять оборотами такого агрегата, или организовать специальный режим управления оборотами, помимо тумблеров и переключателей в схему управления включаются более сложные элементы.
Система управления может быть по-настоящему сложной
- При этом следует учитывать следующие недостатки коллекторных двигателей: низкий момент на малых оборотах вращения двигателя, из-за чего приборам требуется редуктор, что удорожает и усложняет конструкцию; генерация сильных помех; ну и низкая надежность коллектора, про что мы писали выше.
- Также в расчет берется то, что потребление тока и скорость вращения вала зависят и от механической нагрузки на валу.
- Итак, основной параметр, определяющий скорость вращения вала – это подаваемое напряжение на обмотку, поэтому, следуя логике, для управления этим параметром применяются устройства, регулирующие выходное напряжение.
Схемы управления двигателем на базе интегральной микросхемы LM317
Такими устройствами являются регулируемые стабилизаторы напряжения. На сегодняшний день целесообразнее использовать дешевые компенсационные интегральные стабилизаторы, типа LM Схема управления с таким устройством показана на схеме выше.
Компактный стабилизатор
- Схема довольно примитивная, но, кажется, достаточно простой, а главное эффективной и недорогой. Мы видим, что ограничение выходного напряжения регулируется дополнительным резистором, обозначенным как Rlim, расчет сопротивления которого имеется в спецификации. При этом стоит понимать, что он ухудшает характеристику всей схемы, как стабилизатора.
- Мы видим, что представлено два варианты схемы, какая из них будет показывать себя лучше? Вариант «а» выдает линейную характеристику удобного регулирования, благодаря чему очень популярен.
- Вариант «б», наоборот», характеристику имеет нелинейную. Фактическая разница будет заметна при выходе из строя переменного резистора: в первом случае мы получим максимальную скорость вращения, а во втором – наоборот, минимальную.
https://youtube.com/watch?v=uPdv7l9zx2c
Не будем больше углубляться в дебри, так как статья у нас по большей части ознакомительная. Мы разобрали принципы действия двигателей постоянного тока, а это уже что-то. Если вопрос вас заинтересовал, то обязательно просмотрите следующее видео. А на этом мы прощаемся с вами! Всего хорошего!
Главные полюса
Тяговый электродвигатель, работающий на постоянном токе, включает в свою конструкцию обмотку возбуждения, где и появляется магнитодвижущая сила, создающая, в свою очередь, магнитное поле. В состав обмотки входят катушки, надеваемые на сердечники основных полюсов. На стороне сердечника, направленной к якорю, устанавливается полюсный наконечник, он же башмак. С его помощью осуществляется равномерное распределение магнитного потока по всей поверхности якоря. Перечисленные детали отмечены на предыдущем рисунке вместе со станиной.
На практике довольно редко используется схема, включающая в себя полюсный сердечник и полюсный башмак. Как правило, они объединяются в единое целое и образуют главный полюс. За счет этого в сердечнике полюса наступает снижение вихревых потоков, вызываемых действием пульсаций магнитной индукции в наконечниках из-за зубчатой поверхности якоря.
Для сборки полюса используются стальные лакированные листы, которые затем попадают под пресс высокого давления. Сквозь сердечник пропускаются болты или специальные заклепки, чтобы стянуть всю конструкцию. Их равномерное распределение позволяет успешно выдерживать упругость сжатых полос. Крепление полюсов к станине осуществляется с помощью болтов или шпилек.
Коллекторный электродвигатель
Коллекторный электродвигатель постоянного тока, работавший от гальванической батареи, впервые применил в 1838 г. рус. электротехник
Б. С. Якоби, установив его на судне. ТЭД для тяги на ж. д. демонстрировался в кон. 70-х гг. 19 в. В 80-е гг. ТЭД начали использовать на городском рельсовом транспорте — трамвае, а затем и на ж.-д. подвижном составе. Коллекторные ТЭД для трамваев строили на Рижском электромашиностроительном заводе (РЭЗ), Петроградском заводе «Электросила» и на Московском заводе «Динамо». В 1929 г. на заводе «Динамо» построены тяговые двигатели мощностью 340 кВт на напряжение 1500 В для магистральных электровозов ВЛ19. С конца 40-х гг. производство коллекторных ТЭД для электровозов в основном осуществлялось на Новочеркасском и Тбилисском заводах, для тепловозов — на Харьковском, для моторных вагонов магистральных железных дорог и линий метрополитена — на Рижском и Московском заводах. Пассажирские электровозы для ж. д. России поставлялись также из Чехословакии (все серии ЧС). В начальный период электрификации рос. железных дорог на переменном токе небольшие партии электровозов с коллекторными ТЭД были закуплены во Франции и Германии. С начала 90-х гг. коллекторные ТЭД в России изготовляют на НЭВЗ (для электровозов), заводе «Электросила» и РЭЗ, небольшие партии — на Новосибирском заводе «Сибстанкоэлектропривод» (для моторных вагонов).
Основные части коллекторного ТЭД — неподвижный индуктор и вращающийся якорь (рис. 5.56).
Индуктор, создающий магнитный поток — это стальной (литой или сварной) массивный корпус с главными и дополнительными полюсами. Якорь, вращаясь в индукторе, преобразует механическую энергию в электрическую (режим генератора). Якорь имеет стальной сердечник с обмоткой, подсоединенной к коллектору. Коллектор, набранный из отдельных пластин, необходим для изменения направления тока (коммутации) в проводнике якорной обмотки, чтобы не менялось направление вращающего момента при перемещении этого проводника под полюс другой полярности. Процесс коммутации может сопровождаться искрением под щетками; расстройство коммутации при определенных условиях приводит к возникновению на коллекторе электрической дуги (круговой огонь), повреждающей коллектор и щетки. Мощность коллекторных ТЭД ограничена условиями коммутации. ТЭД постоянного тока питаются непосредственно от контактной сети напряжением 3000 В с допустимым повышением до 4000 В (за рубежом есть линии на 1500 В), максимальная мощность до 1000 кВт (на грузовых и скоростных пассажирских электровозах). Двигатели соединяют последовательно по два и более для понижения номинального напряжения на коллекторе до
1500 В, реже до 750 В (хуже по эксплуатационным показателям; используется главным образом на моторных вагонах).
Изоляцию обмоток от корпуса рассчитывают на максимальное напряжение в контактной сети.
Напряжение между коллекторными пластинами
Реакция якоря в определенных условиях может вызвать нежелательные по своим последствиям явления.
К числу таких явлений относится прежде всего увеличение напряжения между коллекторными пластинами вследствие искажения поля под воздействием поперечной реакции якоря.
При холостом ходе максимальное напряжение между соседними пластинами в случае, например, применения простой петлевой обмотки
uк = 2 × Bδ × wс × lδ × vа .
где wс – число витков секции, Bδ – магнитная индукция в воздушном зазоре, lδ – расчетная длина якоря, vа – окружная скорость вращения якоря.
При нагрузке максимальная индукция под одним из краев полюса (смотрите рисунок 1, в, в статье “Влияние реакции якоря на магнитный поток машины”) достигает некоторого значения Bδ макс и
uк.макс = 2 × Bδ макс × wс × lδ × vа .
Следовательно,
| uк.макс / uк = Bδ макс / Bδ . | (1) |
Среднее напряжение между соседними коллекторными пластинами
uк.ср = 2 × Bδ ср × wс × lδ × vа = 2αδ × Bδ × wс × lδ × vа ,
где αδ – коэффициент полюсной дуги,
и поэтому
| (2) |
При расчете машин постоянного тока число коллекторных пластин K выбирается таким образом, чтобы среднее напряжение между соседними коллекторными пластинами
| (3) |
не превышало 18 – 22 В.
Согласно выражениям (2) и (3),
| (4) |
Предельное значение uк.макс ограничивается возможностью возникновения электрической дуги между смежными пластинами. Поэтому обычно требуется, чтобы uк.макс ≤ 30 – 50 В.
Недопустимое повышение uк.макс может произойти либо вследствие увеличения Bδ макс под воздействием реакции якоря (например, значительная перегрузка машины), либо вследствие уменьшения Bδ (двигатели с регулированием скорости в широких пределах).
Искажение кривой поля тем значительнее, чем меньше воздушный зазор. Зазор в машинах средней и большой мощности выбирают обычно таким, чтобы при номинальном режиме индукция под краем полюса (x = bδ / 2) не меняла своего направления (“опрокидывание” поля). Согласно выражению (6), в статье “Влияние реакции якоря на магнитный поток машины”, для этого необходимо, чтобы сумма намагничивающих сил зазора и зубцов
При диаметре якоря Dа = 10 – 50 см обычно δ ≈ 0,009 × Dа. Здесь Aа – линейная нагрузка якоря, bδ – расчетная полюсная дуга.
Питание
Питание ТЭД осуществляется от контактной сети (ЭПС) и от находящегося на подвижном составе источника энергии (электромашинного генератора, аккумулятора). По роду тока различают ТЭД коллекторные постоянного тока (пульсация тока до 10%), коллекторные пульсирующего тока с питанием от однофазного выпрямителя, и бесколлекторные переменного тока асинхронные (однофазные, многофазные) и синхронные (вентильные) с преобразованием однофазного тока в многофазный (обычно в трехфазный). Выпрямители и преобразователи размещены на подвижном составе, что позволяет регулировать напряжение на ТЭД. При питании током постоянного напряжения от контактной сети регулировка напряжения на ТЭД до 1970-х гг. осуществлялась переключением двигателей на последовательное или параллельное соединение и включением в цепь пусковых резисторов. С нач. 70-х гг. на электровозах ВЛ80Р и в дальнейшем осуществляется обычно бесступенчатая плавная регулировка напряжения расположенными на ЭПС полупроводниковыми управляемыми выпрямителями или преобразователями.
Синхронный (вентильный) двигатель
Синхронный (вентильный) ТЭД по принципу действия подобен машине постоянного тока, в которой механический коллектор заменен системой силовых управляемых вентилей преобразовательной установки.
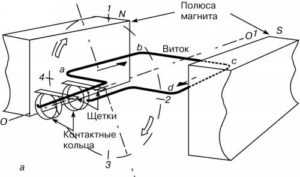
На статоре располагается многофазная обмотка, на роторе — обмотка возбуждения постоянного тока, электроэнергия к которой подводится через специальные кольца и щетки. Переключение вентилей происходит при малой частоте вращения по сигналам от датчиков контроля положения ротора, установленных внутри электродвигателя, или по противоэдс при более высокой скорости. Непрерывное вращение ротора обеспечивается поочередным переключением выводов статорной обмотки согласно программе управления вентилями преобразователя. Регулирование вентильного ТЭД осуществляется по напряжению, частоте и силе тока возбуждения (три независимых канала регулирования). В системе управления вентильным ТЭД могут быть использованы микропроцессоры.
Пуск при пониженном напряжении цепи якоря
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения.
Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения.
Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения.
Характеристики двигателя постоянного тока с параллельным возбуждением
Формула общего тока, идущего от источника, выводится согласно первому закону Кирхгофа и имеет вид: I = Iя + Iв, где Iя — ток якоря, Iв – ток возбуждения, а I – ток, который двигатель потребляет от сети. Следует отметить, что при этом Iв не зависит от Iя, т.е. ток возбуждения не зависит от нагрузки. Величина тока в обмотке возбуждения меньше тока якоря и составляет примерно 2-5% от сетевого тока.
В целом, данные электродвигатели отличаются следующими весьма полезными тяговыми параметрами:
- Высокая экономичность (поскольку ток якоря не проходит через обмотку возбуждения).
- Устойчивость и непрерывность рабочего цикла при колебаниях нагрузки в широких пределах (т.к. величина момента сохраняется даже в случае изменения числа оборотов вала).
При недостаточном моменте пуск осуществляется посредством перехода на смешанный тип возбуждения.
Сферы применения двигателя
Поскольку частота вращения подобных двигателей остается почти постоянной даже при изменении нагрузки, а также может изменяться при помощи регулировочного реостата, они широко применяются в работе с:
- вентиляторами;
- насосами;
- шахтными подъемниками;
- подвесными электрическими дорогами;
- станками (токарными, металлорежущими, ткацкими, печатными, листоправильными и пр.).
Таким образом, этот вид двигателей в основном используется с механизмами, требующими постоянства скорости вращения или ее широкой регулировки.
Регулирование частоты вращения
Регулирование скорости – это целенаправленное изменение скорости электродвигателя в принудительном порядке при помощи специальных устройств или приспособлений. Оно позволяет обеспечить оптимальный режим работы механизма, его рациональное использование, а также уменьшить расход энергии.
Существует три основных способа регулирования скорости двигателя:
- Изменение магнитного потока главных полюсов. Осуществляется при помощи регулировочного реостата: при увеличении его сопротивления магнитный поток главных полюсов и ток возбуждения Iв уменьшаются. При этом увеличивается число оборотов якоря на холостом ходу, а также угол наклона механической характеристики. Жесткость механических характеристик сохраняется. Однако увеличение скорости может привести к механическим повреждениям агрегата и к ухудшению коммутации, поэтому не рекомендуется увеличивать частоту вращения этим методом более чем в два раза.
- Изменение сопротивления цепи якоря. К якорю последовательно подключается регулировочный реостат. Скорость вращения якоря уменьшается при увеличении сопротивления реостата, а наклон механических характеристик увеличивается. Регулировка скорости вышеуказанным способом:
- способствует уменьшению частоты вращения относительно естественной характеристики;
- связана с большой величиной потерь в регулировочном реостате, следовательно, неэкономична.
- Безреостатное изменение подаваемого на якорь напряжения. В этом случае необходимо наличие отдельного источника питания с регулируемым напряжением, например, генератора или управляемого вентиля.
Двигатель с независимым возбуждением
Двигатель постоянного тока независимого возбуждения как раз и реализует третий принцип регулирования скорости. Его отличие в том, что обмотка возбуждения и магнитное поле главных полюсов подключаются к разным источникам. Ток возбуждения является неизменной характеристикой, а магнитное поле меняется. При этом изменяется число оборотов вала на холостом ходу, жесткость характеристики остается прежней.
Таким образом, принцип работы дпт с независимым возбуждением является достаточно сложным вследствие независимой работы двух источников, тем не менее, его главное преимущество – большая экономичность.
Тепловые характеристики
Тепловые характеристики и кривые нагревания и охлаждения обмоток (якоря, компенсационной, главных и дополнительных полюсов) показывают зависимости температур обмоток (либо чаще — превышение температуры обмотки над температурой окружающей среды) в зависимости от силы тока нагрузки или от времени при различной силе тока. Аэродинамические характеристики определяются зависимостью пропускаемого через двигатель количества воздуха от давления его в коллекторной камере.
Конструкция ТЭД должна исключать возможность случайного соприкосновения обслуживающего персонала с вращающимися частями, обеспечивать удобное техническое обслуживание и ремонт, удовлетворять требованиям пожарной безопасности. Основные показатели надежности ТЭД — вероятность безотказной работы, наработка на отказ, установленный срок службы до списания и т.д.
Устройство ТЭД
Тяговый электродвигатель, по сути, представляет собой электродвигатель с передачей вращающего момента на движитель транспортного средства (колесо, гусеницу или гребной винт).
В конце XIX века было создано несколько моделей безредукторных ТЭД, когда якорь насаживается непосредственно на ось колёсной пары. Однако даже полное подрессоривание двигателя относительно оси не избавляло конструкцию от недостатков, приводящих к невозможности развить приемлемую мощность двигателя. Проблема была решена установкой понижающего редуктора, что дало возможность значительно увеличить мощность и развить достаточную для массового применения ТЭД на транспортных средствах силу тяги.
Помимо основного режима тяговые электродвигатели могут работать в режиме генератора (при электрическом торможении, рекуперации).
Существенным моментом использования ТЭД является необходимость обеспечения плавного пуска-торможения двигателя для управления скоростью транспортного средства. Вначале регулирование силы тока осуществлялось за счёт подключения дополнительных резисторов и изменения схемы коммутации силовых цепей (при наличии нескольких ТЭД — переключения их по мере разгона с последовательного соединения на последовательно-параллельное, и далее на параллельное). С целью уйти от бесполезной нагрузки и повысить КПД стали применять импульсный ток, регулировка которого не требовала резисторов. В дальнейшем стали использоваться электронные схемы, обслуживаемые микропроцессорами. Для управления данными схемами (вне зависимости от их устройства) применяются контроллеры, управляемые человеком, определяющим требуемую скорость транспортного средства.
Материалы, применяемые в электрических машинах, при нормальных и аварийных режимах работы должны соответствовать ГОСТ 12.1.044.
Значение сопротивления изоляции обмоток устанавливают в соответствующей нормативно-технической документации или в рабочих чертежах. Для городского электротранспорта после испытаний на влагостойкость сопротивление должно быть не менее 0,5 Мом.
Вибрация, создаваемая ТЭД, должна устанавливаться по ГОСТ 20815 в соответствующей нормативно-технической документации.
Линейный электродвигатель
Линейный электродвигатель является составной частью линейного электропривода и служит для непосредственного преобразования электрической энергии в энергию поступательного движения транспортного средства, т. е. без механической передачи. В линейный привод входит также аппаратура управления и регулирования скорости. Линейный электродвигатель (рис. 5.59) содержит питаемый электрическим током первичный элемент (индуктор), являющийся статором, и вторичный элемент в виде реактивной полосы, выполняющей роль ротора. Индуктор и реактивная полоса разделены воздушным зазором. Неподвижный элемент магнитной системы линейного электродвигателя разомкнут и имеет развернутую в плоскости обмотку произвольной длины, создающую бегущее магнитное поле, а подвижный элемент движется относительно неподвижного (см. рис.).
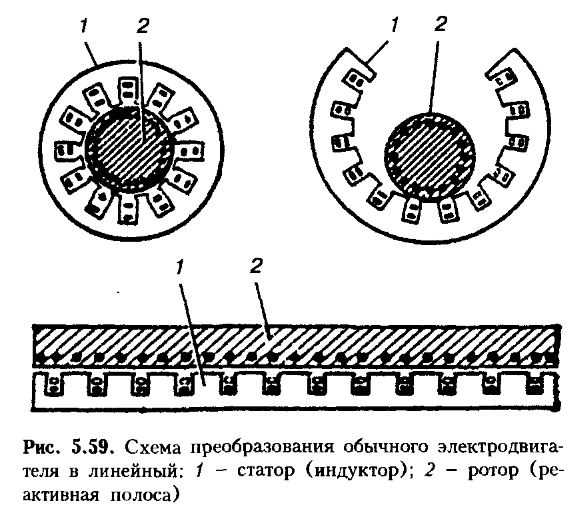
Линейный электродвигатель может быть асинхронным и синхронным. Реактивная полоса асинхронного линейного электродвигателя (наиболее распространенная схема), выполненная в виде бруска обычно прямоугольного сечения без обмоток, закрепляется вдоль путепровода, над которым перемещается электровоз, несущий подвижную часть (индуктор) двигателя. Магнитопровод индуктора выполнен с развернутыми многофазными обмотками, питаемыми от источника переменного тока. Вследствие взаимодействия магнитного поля индуктора с полем реактивной полосы возникают силы, которые заставляют перемещаться с ускорением индуктор линейного электродвигателя относительно неподвижной реактивной полосы до тех пор, пока скорости перемещения индуктора и бегущего магнитного поля реактивной полосы не уравняются. Преимуществом такой конструкции является размещение в путепроводе более простой в
изготовлении, чем индуктор, реактивной полосы. Возможна схема, в которой в путепроводе размещается индуктор, при этом не требуется передачи электроэнергии на движущийся объект, нет контактного рельса на трассе и токоприемников на подвижном составе. Однако в этом случае вдоль трассы необходимо разместить большое число индукторов. Такая схема целесообразна при большой частоте следования транспортных средств или при подвижном составе большой длины. Применяется и комбинированный вариант, например, с размещением индукторов в путепроводе на участках разгона, торможения, подъема и спуска; на остальной части трассы используется индуктор, установленный на подвижном составе. Линейный электродвигатель получает питание от преобразователя или непосредственно от промышленной сети переменного тока (линейный асинхронный привод).
Управление силой тяги и скоростью движения осуществляется системой автоматического управления и регулирования путем изменения частоты напряжения и силы тока в обмотках двигателя.
Линейный электропривод обеспечивает также торможение подвижного состава, например, противовключением. Достоинствами привода являются отсутствие вращающихся частей, механической передачи, простота в эксплуатации, большой ресурс работы. К недостаткам относятся более низкие по сравнению с обычным электроприводом энергетические показатели, связанные с разомкнутостью магнитной цепи и большими рабочими зазорами, сложность и высокая стоимость изготовления и др. Линейные электродвигатели могут применяться на поездах высокоскоростного наземного транспорта, относящихся к левитирующим транспортным системам. Общий кпд таких систем с линейным электродвигателем при оптимизации его показателей не уступает кпд обычного тягового электропривода вследствие исключения промежуточных звеньев передачи силы тяги и отсутствия проскальзывания при механическом контакте между ходовой частью и путепроводом.
Тяговые электродвигатель асинхронного типа
На железнодорожном транспорте асинхронный тяговый двигатель долгое время не мог использоваться из-за отсутствия в электроснабжении подвижного состава переменного трехфазного тока. Постепенно развивающееся электротехническое производство позволило создать и усовершенствовать электронику полупроводникового типа.

Таким образом, были созданы преобразователи тока и напряжения, обладающие мощностью, достаточной, чтобы обеспечить энергией асинхронный тяговый двигатель. Ведущую роль в этом деле сыграли мощные транзисторы.
Данные устройства оказались просты и надежны в эксплуатации. У них заметно снизились габаритные размеры и вес в сравнении с двигателями постоянного тока. Асинхронный тяговый двигатель не требует особого технического обслуживания, способен переходить в генераторный режим без специального переключения, а лишь под действием повышенной частоты вращения ротора. Подобная схема существенно упрощает использование системы электрического торможения.
https://youtube.com/watch?v=bxbqSMdPh1Y
Генератор постоянного тока: устройство и принцип действия

Принцип работы электродвигателя
Устройство генератора: принцип работы

Виды электродвигателей: устройство, принцип работы
Двигатель постоянного тока

Электродвигатель АИР
Электровоз постоянного тока
В кузове данного локомотива расположены:
- мотор-вентиляторы, необходимые для охлаждения тяговых электродвигателей и пусковых сопротивлений,
- мотор-компрессор, который качает воздух в главные резервуары, расположенные под кузовом электровоза,
- аккумуляторная батарея,
- быстродействующий выключатель (БВ) – аппарат служащий для подключения силовой цепи электровоза к контактному проводу (через токоприемник, конечно) и защищающий электрические цепи от перегрузок, путем их быстрого отключения от сети
Компрессор электровоза
и многие другие необходимые для работы электровоза аппараты. Количество мотор-вентиляторов на «постоянниках» невелико, обычно один или два, мотор-компрессор также один на секцию, на пассажирских электровозах устанавливается, как правило, два мотор-компрессора.
Все силовые и низковольтные цепи управления коммутируются контроллером машиниста, установленного в кабине, а также посредством кнопочных выключателей, кнопок и т.д. Напряжение в цепях управления составляет 50 вольт постоянного тока, им же происходит заряд аккумуляторной батареи. Ток для питания цепей управления вырабатывается генератором управления.
Интересный вопрос: Почему бы не подвести напрямую к контроллеру машиниста силовые цепи?
Конечно, нельзя подвести в кабину машиниста к контроллеру силовые кабели, это очень опасно, поэтому вся регулировка напряжения на ТЭД и многое другое производится через низковольтные цепи управления, посредством реле со своими блокировками в цепях, контакторами электропневматическими, электромагнитными, пневматическими блокировками и т.д.
Все силовые контакторы имеют устройства для дугогашения, тяговые электродвигатели подключаются к силовой цепи пневматическими контактами с дугогашением, называемыми «линейными». Электродвигатели вентиляторов и компрессоров работают на постоянном токе. Все высоковольтное оборудование электровозов как постоянного, так и переменного тока располагается в высоковольтных камерах (ВВК), которые обычно поделены на отсеки – блоки силовых аппаратов (БСА).
Силовые цепи (машинное отделение электровоза)
Электробезопасность
Так вот, просто так в ВВК никто не зайдет, потому что они закрываются подвижными металлическими сетчатыми дверями (как в купе), именуемыми на языке профессионалов «шторками». Как только машинист поднимает токоприемник, то сразу получает питание вентиль защиты, который открывает доступ воздуха к пневматическим цилиндрам блокировок ВВК, а те в свою очередь выпускают штока, которые заходят в пазы на специальных кронштейнах, приваренных к шторкам и все, ВВК надежно закрыты и заблокированы.
Если шторку, где- то не закрыли полностью, шток блокировки уперся в торец двери, то токоприемник не поднимется, придется искать неплотность и заново закрывать шторки. А теперь попасть в ВВК можно будет только тогда, когда машинист опустит токоприемник.
Электровозостроительные предприятия
Электровозы строились и во времена СССР и сейчас электровозостроительными заводами: Новочеркасским (НЭВЗ), Тбилисским (ТЭВЗ), который по понятным причинам мы потеряли. Данными заводами были спроектированы и созданы электровозы, которые наиболее широко работали и работают на отечественных железных дорогах: постоянники – ВЛ8; ВЛ10; ВЛ10У; ВЛ11; ВЛ15; 2ЭС4К и 3ЭС4К «Дончак»; переменники – ВЛ60 (пассажирская модификация ВЛ60 п/к), ВЛ80Т, С, Р, ВЛ85, ВЛ65, ЭП1, 1М, 1П, «Ермаки» — Э5К, 2ЭС5К, 3ЭС5К, 4ЭС5К, электровозы двойного питания – ВЛ82, ВЛ82М и ЭП20 «Олимп». Я не буду показывать здесь экспериментальные электровозы, созданные в единственном или нескольких экземплярах, им на нашем сайте посвящены отдельные статьи, надо просто поискать. С потерей ТЭВЗа в России появились новые электровозостроительные заводы, которые отметились очень мощными грузовыми серийными электровозами, обоих систем тока. Это машиностроительный концерн «Синара – Уральские локомотивы», с заводом, расположенным в городе Верхняя Пышма на Урале. Его продукцию составляют такие электровозы постоянного тока, как 2ЭС6 и 2ЭС10 «Гранит», на котором установлены асинхронные тяговые электродвигатели.
Новочеркасский электровозостроительный завод НЭВЗ
Теперь влился в дружную семью электровозостроительных заводов и наш лидер по производству тепловозов – Коломенский тепловозостроительный завод. Им на базе тепловоза ТЭП 70 БС (кузов, тележки) создан пассажирский электровоз постоянного тока ЭП2К, надо отметить, что это первый отечественный пассажирский электровоз постоянного тока, да это так. Если пассажирские поезда на переменном токе водил ВЛ60 П/К, то всю нагрузку по вождению пассажирских поездов в СССР и по настоящее время приняли на себя наши собратья из ЧССР – «Чехи». Это замечательное семейство пассажирских электровозов постоянного и переменного тока строилось на заводах «Шкода» в Праге (Чехославакия), жалко, что теперь это два разных государства. Эти электровозы достойны уважения, красивые, мощные, скоростные и надежные. Они и по сей день водят пассажирские поезда по железным дорогам России. Практически всем знакома эта марка – «ЧС», выведенная железными буквами на передней части этих электровозов. Познакомимся с ними, постоянники – ЧС1; ЧС2; ЧС2Т; ЧС3; ЧС6; ЧС7; ЧС200 (ЧС3, ЧС6, ЧС7, ЧС200 выполнены двухсекционными); переменники – ЧС4; ЧС4Т и двухсекционный ЧС8.
- Электровоз ЧС4
- Электровоз ЧС2
Помимо электровозов в Чехословакии строились для наших дорог и маневровые, всем известные, тепловозы с электрической передачей: ЧМЭ2; ЧМЭ3; ЧМЭ3Т и ЧМЭ5, они и сейчас производят маневровую работу на многих дорогах России. Да что там говорить, даже на узкоколейных наших железных дорогах работал «чех» — узкоколейный тепловоз ТУ3. Хотя это тепловозное отступление от электровозной темы я сделал специально, для расширения кругозора читателей.
На этом я завершаю тему электровозов, надеюсь, что мое повествование было развернутым и понятным. Теперь путешествуя по железным дорогам нашей великой России, вы нет, нет, да и посмотрите на электровоз, ведущий ваш поезд и уже с определенным пониманием отнесетесь к тому, почему и как вы едете по стальной магистрали.
Предыдущие части:
- Устройство электровоза (Часть 1)
- Электровозы постоянного тока — Устройство электровоза (Часть 2)
- Электровозы переменного тока — Устройство электровоза (Часть 3)
- Электровозы переменного тока — Устройство электровозов (Часть 4)
Эксплуатационные свойства
Эксплуатационные свойства тяговых двигателей могут быть универсальными, то есть присущими всем видам ЭПС, и частными, то есть присущими ЭПС определенных видов. Некоторые эксплуатационные свойства могут быть взаимопротиворечивыми.
Пример частных свойств: высокая перегрузочная способность двигателей, необходимая для получения высоких пусковых ускорений пригородных электропоездов и поездов метрополитена; возможность продолжительной реализации наибольшей возможной силы тяги для грузовых электровозов; низкая регулируемость ТЭД пригородных поездов и поездов метрополитена в сравнении с ТЭД электровозов.
ТЭД пульсирующего тока
ТЭД пульсирующего тока питается от однофазного выпрямителя ЭПС; пульсация тока частотой 100 Гц при номинальной нагрузке 20-30%. Номинальное напряжение на коллекторе 750-1000 В, максимальное 1200 В. На электровозах сила тока ТЭД — до 1200 А, мощность — до 1000 кВт, на моторных вагонах — до 400-600 А и 300 кВт. Напряжение ТЭД регулируется переключением обмоток тягового трансформатора или изменением угла открытия тиристоров (при питании от управляемого выпрямителя).
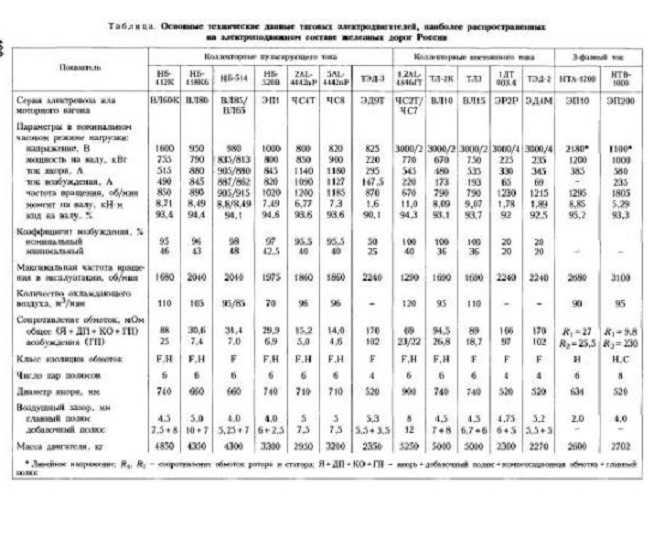
Недостатком любых конструкций коллекторных ТЭД является ненадежный в работе коллекторно-щеточный узел, ограничивающий мощность и частоту вращения (допустимая линейная скорость на поверхности коллектора 50-60 м/с) и требующий регулярного обслуживания при эксплуатации. Основные технические данные ТЭД, применяемых на ЭПС локомотивного парка России и других стран СНГ, приведены в таблице.
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:

Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже: