
Устройство синхронного двигателя
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.
Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Двигатели, применяемые в промышленности
В промышленности успешно применяются оба типа двигателей: и асинхронные с короткозамкнутым ротором, и синхронные коллекторные.
Первый тип устройств имеет важные достоинства:
- Низкая цена;
- Надежность и долговечность;
- Простота эксплуатации.
Имеются и минусы:
- Невозможность плавного регулирования оборотов якоря;
- Невысокая скорость вращения – предел 3000 об./мин. в сетях с частотой 50Гц;
- Большие пусковые токи.
Однако достоинства этих изделий многократно превосходят их недостатки.
К сведению. Асинхронные двигатели применяются в тех устройствах, где требуются постоянные режимы работы промышленного или транспортного оборудования. Например, в приводах всевозможных насосов, ленточных транспортеров, в системах вентиляции, в подъемных механизмах. Ниша асинхронных электрических машин занимает 65-75 % от общего объема применяемых электромоторов.
Синхронные, коллекторные двигатели имеют свои достоинства:
- Возможность плавного бесступенчатого изменения скорости вращения;
- Большая мощность;
- Большая скорость вращения.
Недостатки, присущие коллекторным электромоторам:
- Относительно высокая стоимость;
- Скользящие контакты коллектора якоря, снижающие надежность эксплуатации и уменьшающие ресурс машины;
- Необходимость частого обслуживания.
Они применяются там, где необходимо плавное изменение угловых скоростей: это приводы станков, тяговые моторы электротранспорта, точные системы монтажа.
Оба типа двигателей находят массовое применение в промышленности и быту. Для их длительной и безотказной работы необходимо проведение регламентных работ, при необходимости и восстановительного ремонта, включающего перемотку обмоток статора и ротора.
Подключение асинхронного двигателя к трехфазной сети
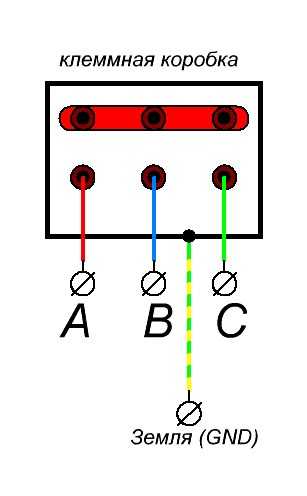
Остановимся более подробно на подключении двигателя. Завод-производитель, как правило, маркирует не только клеммы в клеммной коробке, но и концы проводов. В реальности это либо алюминиевые скобки, либо пластиковые или картонные бирки с номером провода. Обмотки в современных двигателях указывается, как U, V, W. Начало обмоток цифрой «1», а конец — цифрой «2». Как вы уже знаете, асинхронный двигатель может быть включен по схеме «звезда», а также по схеме «треугольник». В 90% случаев используется именно подключение «звезда».
Итак, у нас обмотки двигателя соединены по схеме «звезда». Куда же нам подать напряжение, чтобы двигатель начал свое вращение?

Оказывается, все просто. Так как в трехфазной сети у нас в основном 4 провода ( Фаза A, Фаза B, Фаза C, Земля), то соответственно, мы должны задействовать все 4 провода.
Есть также небольшой нюанс при подключении асинхронного двигателя к трехфазной сети. Допустим, если мы подключили двигатель по схеме выше, то у нас вал будет вращаться в одну сторону, допустим, по часовой стрелке.
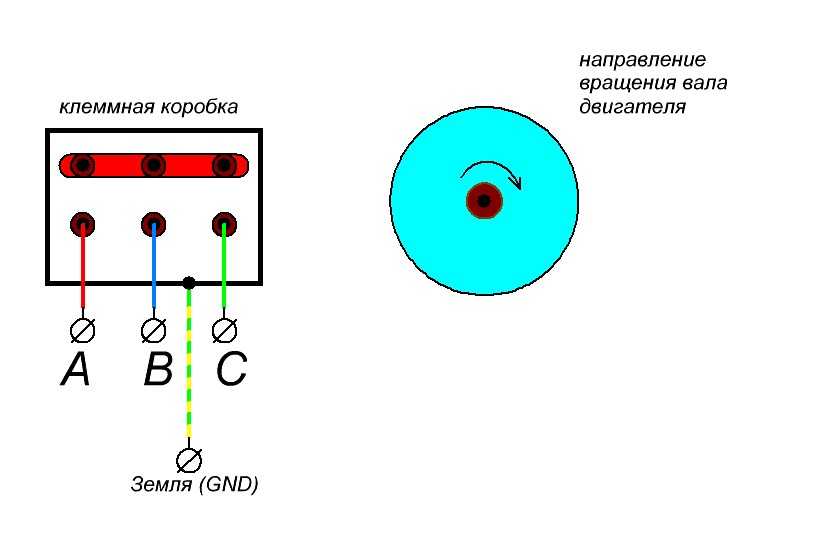
Но если мы поменяем две любые фазы местами, то двигатель начнется вращаться в противоположном направлении. Такой эффект называется реверсивным включением асинхронного двигателя.

Все то же самое касается и при подключении асинхронного двигателя по схеме «треугольник». Имейте ввиду, что при включении двигателя в этом режим, мы на шильдике должны посмотреть допустимое напряжение, на которое рассчитан этот двигатель по схеме соединения «треугольник». Если по схеме «звезда» мы можем подать на такой двигатель питание 380 Вольт, то по схеме «треугольник» только 220 Вольт.


Недостатки асинхронных двигателей
Есть у электродвигателей такой конструкции и свои недостатки. К ним можно отнести потери на тепло. Они, действительно, могут перегреваться, особенно – под нагрузкой. Для этого их корпуса нередко делают ребристыми – чтобы они лучше излучали тепло в окружающее пространство. Также асинхронный прибор часто снабжается сидящим на том же валу вентилятором для обдува ротора, потому что корпус может отводить тепло только от статора, так как воздушного зазора между ними нет, чего не скажешь о роторе.
Невозможность стабильно держать частоту вращения делает асинхронный двигатель неприменимым в некоторых устройствах.
Подключение асинхронного двигателя
Трехфазный переменный ток
Электрическая сеть трехфазного переменного тока получила наиболее широкое распространение среди электрических систем передачи энергии. Главным преимуществом трехфазной системы по сравнению с однофазной и двухфазной системами является ее экономичность. В трехфазной цепи энергия передается по трем проводам, а токи текущие в разных проводах сдвинуты относительно друг друга по фазе на 120°, при этом синусоидальные ЭДС на разных фазах имеют одинаковую частоту и амплитуду.
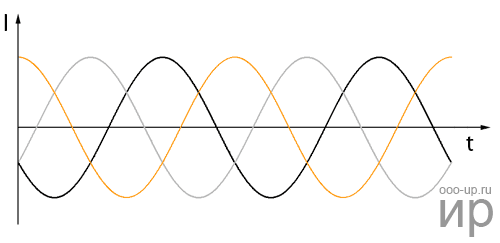 Трехфазный ток (разница фаз 120°)
Трехфазный ток (разница фаз 120°)
Звезда и треугольник
Трехфазная обмотка статора электродвигателя соединяется по схеме «звезда» или «треугольник» в зависимости от напряжения питания сети. Концы трехфазной обмотки могут быть: соединены внутри электродвигателя (из двигателя выходит три провода), выведены наружу (выходит шесть проводов), выведены в распределительную коробку (в коробку выходит шесть проводов, из коробки три).
Фазное напряжение
— разница потенциалов между началом и концом одной фазы
Другое определение для соединения «звезда»: фазное напряжение это разница потенциалов между линейным проводом и нейтралью (обратите внимание, что у схемы «треугольник» отсутствует нейтраль)
Линейное напряжение
— разность потенциалов между двумя линейными проводами (между фазами).
| Звезда | Треугольник | Обозначение |
| Uл, Uф — линейное и фазовое напряжение, В, | ||
| Iл, Iф — линейный и фазовый ток, А, | ||
| S — полная мощность, Вт | ||
| P — активная мощность, Вт |
Внимание: Несмотря на то, что мощность для соединений в звезду и треугольник вычисляется по одной формуле, подключение одного и того же электродвигателя разным способом в одну и туже электрическую сеть приведет к потреблению разной мощности. При этом не правильное подключение электродвигателя, может привести к расплавлению обмоток статора
Пример: Допустим электродвигатель был подключен по схеме «звезда» к трехфазной сети переменного тока Uл=380 В (соответственно Uф=220 В) и потреблял ток Iл=1 А. Полная потребляемая мощность: S = 1,73∙380∙1 = 658 Вт.
Теперь изменим схему соединения на «треугольник», линейное напряжение останется таким же Uл=380 В, а фазовое напряжение увеличится в корень из 3 раз Uф=Uл=380 В. Увеличение фазового напряжения приведет к увеличению фазового тока в корень из 3 раз. Таким образом линейный ток схемы «треугольник» будет в три раза больше линейного тока схемы «звезда». А следовательно и потребляемая мощность будет в 3 раза больше:
S = 1,73∙380∙3 = 1975 Вт.
Таким образом, если двигатель рассчитан на подключение к трехфазной сети переменного тока по схеме «звезда», подключение данного электродвигателя по схеме «треугольник» может привести к его поломке.
Если в нормальном режиме электродвигатель подключен по схеме «треугольник», то для уменьшения пусковых токов на время пуска его можно соединить по схеме звезда. При этом вместе с пусковым током уменьшится также пусковой момент.
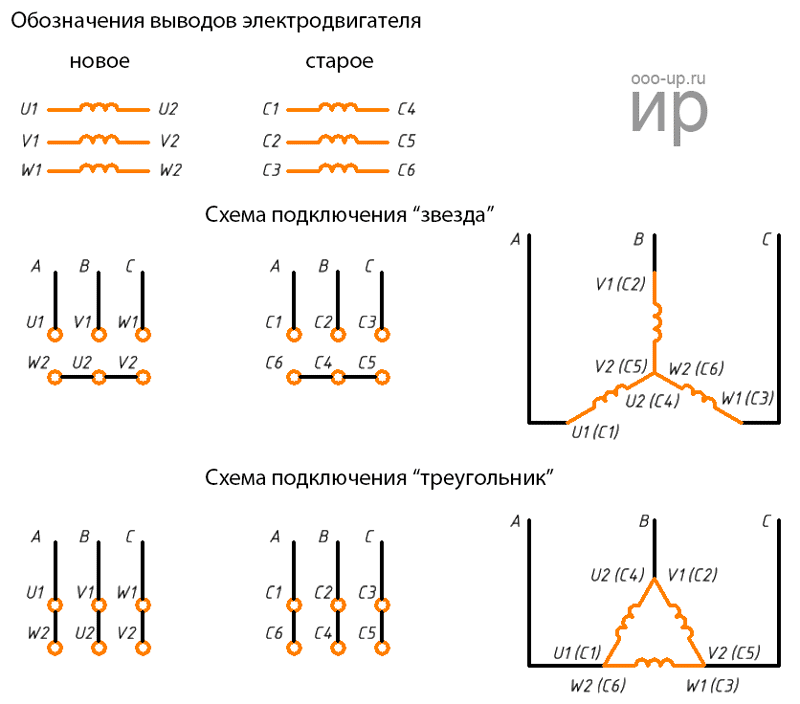 Подключение электродвигателя по схеме звезда и треугольник
Подключение электродвигателя по схеме звезда и треугольник
Обозначение выводов статора трехфазного электродвигателя
Обозначение выводов обмоток статора вновь разрабатываемых
трехфазных машин согласно
ГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | U1 | U2 |
| вторая фаза | V1 | V2 |
| третья фаза | W1 | W2 |
| Соединение в звезду (число выводов 3 или 4) | ||
| первая фаза | U | |
| вторая фаза | V | |
| третья фаза | W | |
| точка звезды (нулевая точка) | N | |
| Соединение в треугольник (число выводов 3) | ||
| первый вывод | U | |
| второй вывод | V | |
| третий вывод | W |
Обозначение выводов обмоток статора ранее разработанных
и модернизируемых трехфазных машин согласноГОСТ 26772-85
| Схема соединения обмоток, наименование фазы и вывода | Обозначение вывода | |
| Начало | Конец | |
| Открытая схема (число выводов 6) | ||
| первая фаза | C1 | C4 |
| вторая фаза | C2 | C5 |
| третья фаза | C3 | C6 |
| Соединение звездой (число выводов 3 или 4) | ||
| первая фаза | C1 | |
| вторая фаза | C2 | |
| третья фаза | C3 | |
| нулевая точка | ||
| Соединение треугольником (число выводов 3) | ||
| первый вывод | C1 | |
| второй вывод | C2 | |
| третий вывод | C3 |
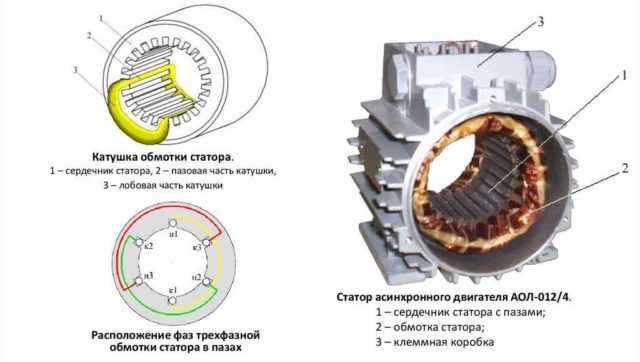
Статор
Статор асинхронного двигателя состоит из трёх частей: корпуса, сердечника и обмотки. Корпус статора служит в качестве опоры для электродвигателя. Изготавливают его из стали или чугуна, сваркой или литьём. К прочности корпуса предъявляются высокие требования, так как при работе возникают вибрации в результате которых может сместиться ротор, что приведёт к заклиниванию мотора и выходу его из строя.

Статор асинхронного двигателя
Есть и ещё одно требование — геометрия корпуса должна быть идеальной. Между обмоткой статора и ротором зазор делают в несколько миллиметров, так что малейшие отклонения могут быть критичны.
Сердечник статора
Сердечник статора асинхронного электродвигателя изготавливают из наборных металлических пластин. Так как сердечник является магнитопроводом, металл используется магнитная электротехническая сталь. Для уменьшения потерь из-за вихревых потоков сердечник набирается из пластин, покрытых слоем диэлектрика (лак).

Сердечник статора набирается из тонких металлических изолированных пластин
Толщина одной пластины — 0,35-0,5 мм. Они собираются в единый пакет, так чтобы пазы всех пластин совпадали. В эти пазы затем укладываются витки обмотки.
Обмотка статора и количество оборотов электродвигателя
Статор асинхронного электромотора чаще всего имеет трёхфазную обмотку возбуждения. Она называется так, потому что является причиной движения ротора. Обмотка статора состоит из катушек, навитых из медной проволоки которые укладываются в пазы сердечника. Каждая обмотка может состоять из нескольких витков проволоки или из одного витка. Провод используется специальный, с лаковым покрытием, которое изолирует витки друг от друга и от стенок сердечника.
Как уже говорили, чаще всего обмотка статора асинхронного двигателя имеет три фазы. В этом случае оси катушек расположены со сдвигом 120°. При таком строении магнитное поле имеет два полюса и делает один полный оборот за один цикл трёхфазного питания. При частоте в электросети равной 50 Гц, скорость вращения поля (и ротора) 50 об/сек или 3000 об/мин.
Укладка катушек обмотки статора асинхронного двигателя
Для уменьшения скорости вращения ротора в асинхронном двигателе обмотку делают с большим количеством полюсов. Так с четырехполюсным стартером скорость вращения будет вдвое меньше — 1500 об/мин. Обмотка с шестью полюсами статора даёт втрое меньшую скорость — 1000 об/мин. С восемью полюсами — в четыре раза меньше, т. е. 750 об/мин. Ещё более «медленные» электромоторы делают очень редко.
Концы обмоток статора выводятся на клеммную коробку корпуса. Тут они могут соединяться по принципу «звезда» или «треугольник» в зависимости от типа подаваемого питания (220 В или 380 В).
Принцип работы
Рассмотрим асинхронный двигатель принцип работы и устройство. Для корректного подключения агрегата к сети, обмотки соединяются по схеме «звезда» или «треугольник». Действие механизма основано на использовании вращающегося магнитного поля статора. Частота вращения многофазной обмотки переменного поля (n1) определяется по формуле:
Здесь:
- f – частота сети в Герцах;
- p – Количество пар полюсов (как правило, 1-4 пары, поскольку чем их больше, тем ниже мощность и КПД, использование полюсов даёт возможность не применять редуктор, при низкой частоте вращения).
Магнитное поле, пронизывающее статор с обмоткой пронизывает и обмотку ротора. За счёт этого индуцируется электродвижущая сила. Электродвижущая сила самоиндукции в обмотке статора (Е1) направлена навстречу приложенному напряжению сети, ограничивая величину тока в статоре. Поскольку обмотка ротора замкнута, или идёт через сопротивление (короткозамкнутый ротор в первом случае, фазный ротор во втором случае), то под действием электродвижущей силы ротора (Е2) в ней образуется ток. Взаимодействие индуцируемого тока в обмотке ротора и магнитного поля статора создаёт электромагнитную силу (Fэл). Направление силы определяется по правилу левой руки.
Согласно правилу: левая рука устанавливается таким образом, что бы магнитно силовые линии входили в ладонь, а вытянутые четыре пальца направлялись вдоль движения тока в обмотке. Тогда отведённый большой палец покажет направление действия электромагнитной силы для конкретного проводника с током.
Совокупность электромагнитных сил двигателя будет равна общему электромагнитному моменту (М), который приводит в действие вал электродвигателя с частотой (n2). Скорость ротора не равна скорости вращения поля, поэтому эта скорость называется асинхронной скоростью. Вращающий момент в асинхронном двигателе развивается только при асинхронной скорости, когда скорость вращения ротора не равна скорости вращения магнитного поля
Важно, что бы при работе двигателя скорость ротора была меньше скорости поля (n2
Таким образом, частота вращения ротора (обороты) будет равна:
Принцип работы асинхронного электрического двигателя легко объясняется с помощью устройства, называющегося диск Арго – Ленца.
Постоянный магнит закрепляют на оси, которая устанавливается в устройстве, способном обеспечить её вращение. Перед полюсами магнита (N-S) помещают диск, выполненный из меди. Диск так же крепится на оси и свободно вращается вокруг неё.
Если вращать магнит за рукоятку, диск тоже будет вращаться в том же направлении. Эффект объясняется тем, что магнитные линии поля, создаваемые магнитом, замыкаются от северного полюса к южному полюсу, пронизывая диск. Эти линии образуют в диске вихревые токи, которые взаимодействуя с полем, приводят к возникновению силы, вращающей диск. Закон Ленца гласит, что направление всякого индукционного тока противодействует величине, вызвавшей его. Вихревые токи пытаются остановить магнит, но поскольку это не возможно, диск следует за магнитом.
Примечательно, что скорость вращения диска всегда меньше скорости вращения магнита. В асинхронных электродвигателях магнит заменяет вращающееся магнитное поле, созданное токами трёхфазной обмотки статора.
Соединим статор и ротор. Что получится?
Таким образом, имеем асинхронный короткозамкнутый двигатель с ротором, в обмотке которого проходит электрический ток. Он и будет причиной возникновения магнитного поля вокруг якорной обмотки. Однако полярность этого потока будет отличаться от созданного статором. Соответственно, и сила, образуемая им, будет вступать в противодействие с той, которая вызвана магнитным полем первичной обмотки. Это и приведёт в движение ротор, так как на нём собрана вторичная катушка, и хвостовики вала якоря закреплены в корпусе двигателя на подшипниках.
Читать также: Как работает ручная ленточная пила
Рассмотрим ситуацию взаимодействия сил, возникающих от магнитных полей статора и ротора, с течением времени. Знаем, что магнитное поле первичной обмотки вращается и обладает определённой частотой. Созданная им сила будет перемещаться, имея аналогичную скорость. Это заставит асинхронный двигатель заработать. И его ротор будет свободно вращаться вокруг оси.
Определение и устройство
В справочниках и энциклопедиях приводят, такое определение:
«Коллекторным называется электродвигатель, у которого датчиком положения вала и переключателем обмоток является одно и то же устройство – коллектор. Такие двигатели могут работать либо только на постоянном токе, либо и на постоянном, и на переменном.»
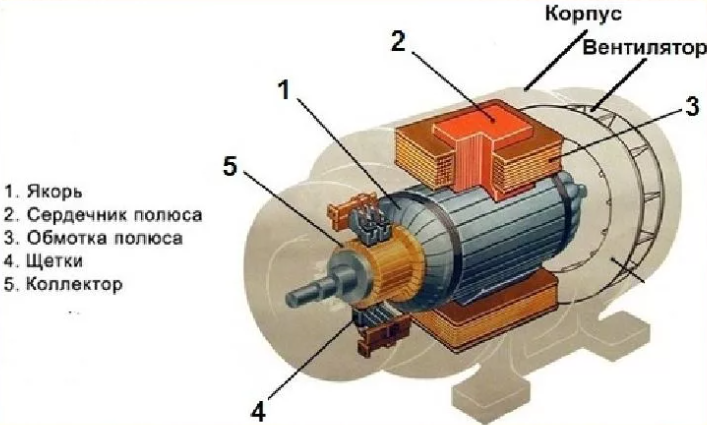
Коллекторный электродвигатель, как и любой другой, состоит из ротора и статора. В этом случае ротор – является якорем. Напомним, что якорем называется та часть электрической машины, которая потребляет основной ток, и в которой индуцируется электродвижущая сила.
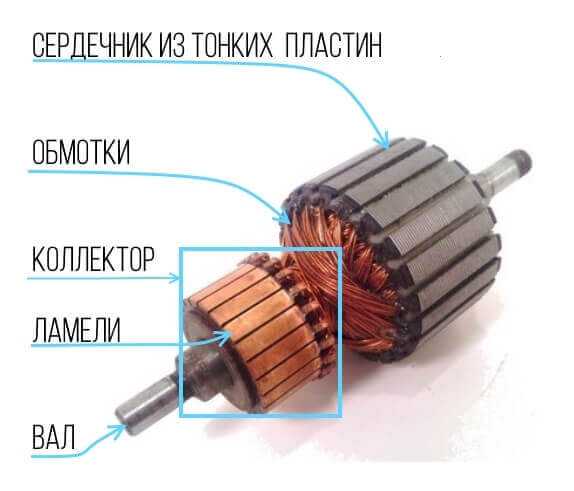
Для чего нужен и как устроен коллектор? Коллектор расположен на валу (роторе), и представляет собой набор продольно расположенных пластин, изолированных от вала и друг от друга. Их называют ламелями. К ламелям подключаются отводы секций обмоток якоря (устройство якорной обмотки КДПТ вы видите на группе рисунков ниже), а точнее к каждой из них подключен конец предыдущей и начало следующей секции обмотки.

Ток к обмоткам подаётся через щетки. Щётки образуют скользящий контакт и во время вращения вала соприкасаются то с одной, то с другой ламелью. Таким образом происходит переключение обмоток якоря, для этого и нужен коллектор.
Щеточный узел состоит из кронштейна с щеткодержателями, непосредственно в них и устанавливаются графитовые или металлографитовые щетки. Для обеспечения хорошего контакта щетки прижимаются к коллектору пружинами.
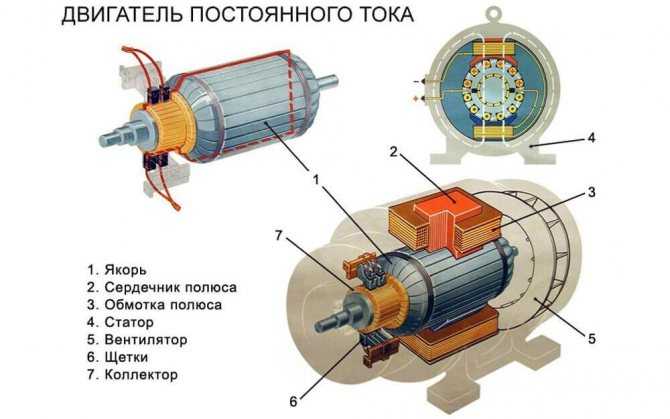
На статоре устанавливаются постоянные магниты или электромагниты (обмотка возбуждения), которые создают магнитное поле статора. В литературе по электрическим машинам вместо слова «статор» чаще используют термины «магнитная система» или «индуктор». На рисунке ниже изображена конструкция ДПТ в разных проекциях. Теперь же давайте разберемся как работает коллекторный двигатель постоянного тока!
Технические соответствия
По стандартам, установленным ГОСТ, АД с фазным ротором должен быть приведен в соответствие определенным параметрам для работы в конкретных условиях. Список требований включает:
- габаритные показатели и мощность;
- уровень защиты, соответствующий эксплуатационным условиям (наружная установка и внутри помещения);
- повышенная термостойкость изолирующего материала;
- режимы функционирования;
- охлаждающая система, собранная в соответствии с характеристиками силового агрегата;
- уровень шума, на холостом ходу не превышающий 2 класс.
Также АД должен быть собран в соответствии определенным климатическим условиям, в которых планируется его использовать. Отдельные модели рассчитаны на конкретный климат. Если для умеренных широт можно использовать большинство современных двигателей, то для территорий с повышенной или пониженной температурой необходимо применять строго соответствующую технику. В противном случае могут значительно снизиться эксплуатационные характеристики, работа станет нестабильной, возможен выход из строя.
Получение вращающегося магнитного поля
Рассматривая работу трехфазных трансформаторов, можно убедиться, что сумма мгновенных значений пульсирующих (переменных) магнитных потоков трех стержней всегда равна нулю. Происходит это потому, что оси трех обмоток AX, BY, CZ параллельны друг другу, как показано на рис. 1. Направление мгновенных токов нанесено для момента времени a диаграммы трехфазного тока (рис. 2). Такой же эффект получается, если обмотки расположены на одной, общей оси (рис. 3).
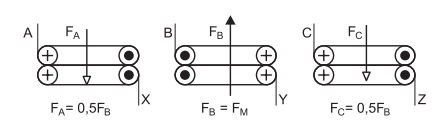
Рис. 1. Суммирование мгновенных значений магнитных потоков трехфазного генератора
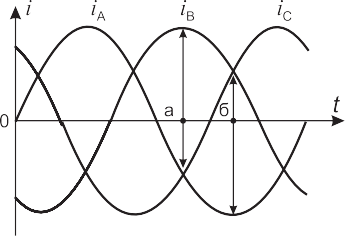
Рис. 2. Кривые трехфазного тока
Рис. 3. Суммирование магнитных потоков трех обмоток, расположенных на одной оси
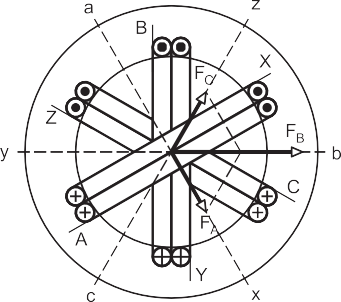
Рис. 4. Суммарный магнитный поток трехфазной обмотки асинхронного двигателя
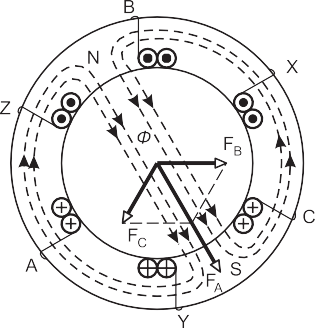
Рис. 5. Суммарный магнитный поток двигателя для момента времени б (рис. 2)
Однако дело существенно меняется, если обмотки расположены в пространстве под углом 120°, так же как и оси. Такое размещение обмоток на внутренней поверхности стального цилиндра показано на рис. 4. Токи в проводах обмотки нанесены для момента времени a диаграммы на рис. 2 и соответствуют показанным на рис. 3.
Намагничивающая сила обмотки BY – FBm направлена по оси обмотки by и имеет максимальное значение, так как iB= IBm. Намагничивающая сила обмотки AX – FAнаправлена по оси своей обмотки ax, но равна 0,5 FBm, так как ток iA= 0,5IBm. Точно так же FC= 0,5FBmи направлена по оси cx. Легко видеть, что при данном расположении намагничивающие силы создают суммарную н.с.:
F = FA+ FC+ FBm= 1,5FBm.
Если рассмотреть явление через 1/6 периода (точка б на рис. 2), то можно видеть (рис. 5), что результирующая н.с., сохранив свое значение, повернулась на 1/6 окружности, т.е. на 60°.
Вместе с н.с. трехфазной обмотки вращается и созданный ею суммарный магнитный поток Ф. При данной конструкции обмоток поток оказался двухполюсным (2р = 1), т.е. имеет одну пару полюсов, что и показано на рис. 5.
Легко видеть, что за один период тока магнитный поток сделает один оборот, а за f периодов в секунду или за f·60 периодов в минуту двухполюсный поток сделает:
Если сконструировать обмотки так, чтобы число пар полюсов было больше единицы (2р = 2, 3, 4…), то скорость вращения магнитного потока уменьшается во столько раз, во сколько 2р >
Итак, трехфазный ток, обтекая трехфазную обмотку, создает вращающийся с постоянной скоростью магнитный поток, сохраняющий свою амплитуду, в 1,5 раза большую амплитуды потока одной фазы
Ф = 1,5Ффзы.
Рис. 6. Статор асинхронного электродвигателя без обмотки
Рис. 7. Стальной лист статора
В асинхронных электродвигателях трехфазная обмотка располагается в пазах внутренней цилиндрической поверхности неподвижной части машины — статора (рис. 6). Статор состоит внешнего стального корпуса 1, в который запрессован стальной сердечник статора 2, имеющий пазы. Сердечник собирается из стальных штампованных листов (рис. 7) электротехнической стали, изолированных друг от друга с обеих сторон специальным лаком. Корпус статора у показанного электродвигателя с внешней стороны обдувается воздухом при помощи вентилятора, и для увеличения охлаждаемой поверхности она выполнена ребристой.
Так как внутри статора должна помещаться вращающаяся часть — ротор, то лобовые части обмотки, не лежащие в пазах, должны укладываться не так, как показано на рис. 4, а на торцевых сторонах сердечника статора 2 (рис. 8). Начала
фаз А, В, С смещены на 120 эл. градусов (рис. 8), а выводы от них помещены в распределительную коробку 3 (рис. 6).
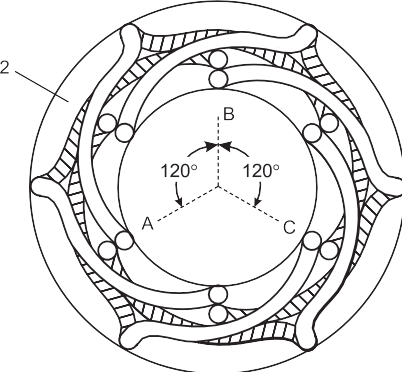
Рис. 8. Расположение обмоток статора в пазах
Назначение и сфера применения АД

Без асинхронного двигателя не обходится большинство предприятий.
Электродвигатели, которые называются асинхронными, применяются почти во всех отраслях промышленности и сельского хозяйства. Они тратят около 70% электричества, которое предназначено для превращения мощности тока в поступательное движение. Работа асинхронного двигателя считается наиболее эффективной в качестве электрической тяги. Без подобных машин не обходится большинство предприятий.
У данных устройств есть несколько положительных сторон:
- Простая и недорогая конструкция, поэтому производство машин не отнимает много времени и средств.
- Низкие расходы по эксплуатации обеспечены отказом от скользящего узелка токосъема, что и повышает надежность мотора.
- Доступность. Они продаются почти во всех магазинах по невысокой цене.
Данный вид машин бывает трехфазным или однофазным в зависимости от числа питающих частей. Если соблюдать правила техники безопасности и настроить электросеть, то трехфазный мотор может работать на однофазной сети.
Как устроен асинхронный двигатель
Первая главная деталь в электромоторе называется статором, вторая – ротором. Статор сделан в форме цилиндра из крепкого листа нержавеющей стали. Внутри сердечника статора установлены обмотки из специальных проводов. Оси проводов укладываются под углом в 120°. Для работы на разных электросетях концы кабелей скрепляются в виде треугольника или звезды.
Роторы в асинхронном двигателе подразделяются на 2 типа:
- Короткозамкнутый. Он является сердечником, в который заливается раскаленный металл. После этого в нем появляются железные стержни, замыкающиеся маленькими торцевыми колечками. Подобная схема конструкции именуется “беличьей клеткой”. В устройствах с высокой мощностью алюминий заменяется на медь.
- С фазами. Мотор имеет толстую трехфазную обмотку, которая почти не отличается от обмотки статора. В основном концы проводов скрепляются в форме звезды, а затем дополнительно закрепляются колечками. Используя щетку, которая подсоединена к обручам, к цепи можно подключить дополнительный резистор. Последний необходим для того, чтобы человек мог контролировать переменное сопротивление в фазе ротора.
5.18.4 Электромагнитная асинхронная муфта
Электромагнитная асинхронная муфта (рис. 5.18.4.1)
устроена по принципу асинхронного двигателя и служит для соединения двух частей
вала. На ведущей части вала 1 помещается полюсная система 2, представляющая
собой систему явно выраженных полюсов с катушками возбуждения. Постоянный ток
в катушке возбуждения подводится через контактные кольца 4. Ведомая часть муфты
3 исполняется по типу роторной обмотки двигателя.
Принцип работы муфты аналогичен работе асинхронного
двигателя, только вращающийся магнитный поток здесь создается механическим вращением
полюсной системы. Вращающий момент от ведущей части вала к ведомой передается
электромагнитным путем. Разъединение муфты производится отключением тока возбуждения.
Управление электрическим током позволяет осуществлять
дистанционное управление муфтой (плавно сцеплять и расщеплять ее). Поэтому ее
применяют в автоматике и телемеханике.
Конструкция простейшего электродвигателя
 Простейший электродвигатель
Простейший электродвигатель
Опять-таки, отметим, что рассматриваемая конструкция — это далеко не единственный вариант реализации подобных устройств. Однако, большая часть приборов работает именно так и среди бытовых приборов или в транспорте вы вряд ли обнаружите что-то другое. Поэтому, рассмотрим простейшую схему и элементарный вариант реализации прибора.
Конструкция самого простого электродвигателя является довольно примитивной. Он состоит из статора и ротора. Всё это убрано в корпус и подсоединяется проводами к источнику электрической энергии. Ещё есть подшипники, но это вещь сугубо механическая и нас сейчас не особенно интересует.
Части двигателя
Статор — это неподвижная часть. Преимущественно неподвижная часть представлена постоянными магнитами. Но бывает и обратный вариант, когда на статоре выполнена обмотка. Различие обусловлено тем, в сети какого типа работает двигатель — постоянного или переменного тока.
Ротор — это подвижная часть, которая, как правило является якорем, а на нем выполнена обмотка. К ротору подходят щётки, на которые подается электрический ток.
Щетки подключаются проводами к источнику питания. Именно они «передают электричество». Но щетки есть не во всех конструкциях двигателей.
Вся конструкция смонтирована в корпус и в закрытом виде представляет собой готовый к работе силовой агрегат. Иногда на ротор двигателя ещё добавляется крыльчатка вентилятора, которая обеспечивает циркуляцию воздуха через агрегат и его дополнительное охлаждение. Так обычно монтируются двигатели постоянного тока.
На валу двигателя мы получаем крутящий момент, который прекрасно можно использовать для своих нужд. Например, передать его посредством зубчатой передачи на редуктор или использовать непосредственно для получения полезной работы (как в вентиляторе дома).
Женщина доила корову, а воде отражалось всё наоборот. Такое может быть и с конструкцией электродвигателя. Тогда намотка там будет на статоре, вместо ротора. Это уже будут двигатели переменного тока. Сам же ротор будет выполнен или из постоянных магнитов, или выглядеть как короткозамкнутая клетка (её ещё именуют беличье колесо).

Бывает также, что и статор, и ротор электродвигателя представляют собой обмотки. Тогда картина незначительно меняется. Правда смысл всё равно сохраняется прежним. Про принципы конструирования таких машин мы поговорим чуть позже.