
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
Подключение шагового двигателя к Ардуино на базе L298
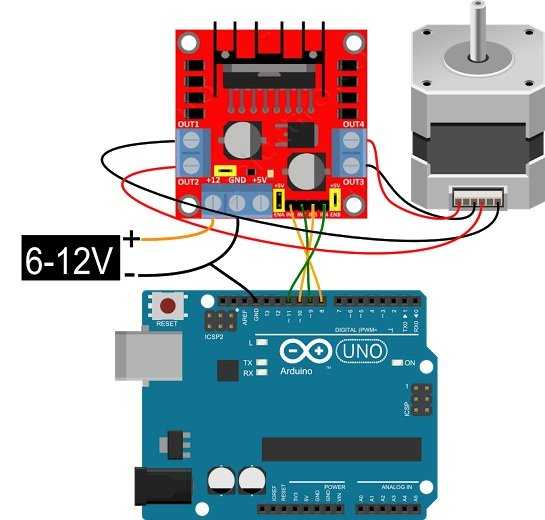
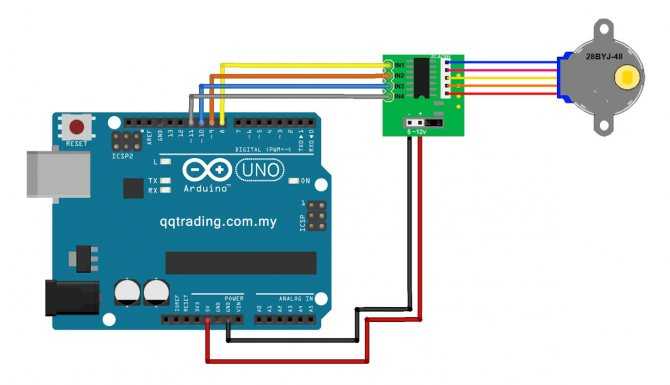
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
Подключение шагового двигателя к Ардуино
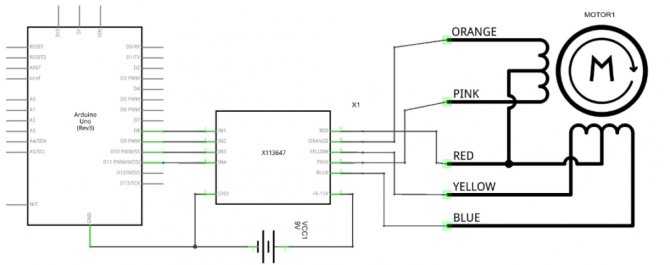
Принципиальная схема подключения.
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.
Модель своими руками
Сделать электродвигатель (вентильный) своими руками довольно сложно. В первую очередь для сборки потребуется магнитный статор. В некоторых случаях ротор используют со стальным якорем. Далее потребуется заготовить вал с головкой. По диаметру он должен подходить под кольцо. Статор в данном случае обязан быть с первичной обмоткой, которая может выдерживать напряжение в 220 В.
Для подключения двигателя вентильного типа понадобится проводник. Подсоединяться он обязан к клеммной коробке. У некоторых модификаций вал крепится на диске. Таким образом, процесс набора оборотов происходит быстро. Для того чтобы избежать случаев коротких замыканий в цепи, используют уплотнитель.
Смотреть галерею
Типы шаговых двигателей
Шаговый двигатель с постоянным магнитом
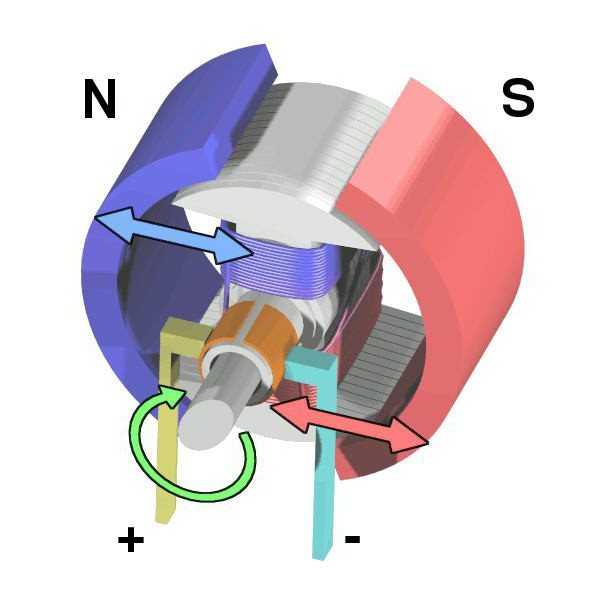
Ротор такого мотора несет постоянный магнит в форме диска с двумя или большим количеством полюсов. Работает точно также как описано выше. Обмотки статора будут притягивать или отталкивать постоянный магнит на роторе и создавать тем самым крутящий момент. Ниже представлена схема шагового двигателя с постоянным магнитом.
Обычно, величина шага таких двигателей лежит в диапазоне 45-90°.
Шаговый двигатель с переменным магнитным сопротивлением
У двигателей этого типа на роторе нет постоянного магнита. Вместо этого, ротор изготавливается из магнитомягкого металла в виде зубчатого диска, типа шестеренки. Статор имеет более четырех обмоток. Обмотки запитываются в противоположных парах и притягивают ротор. Отсутствие постоянного магнита отрицательно влияет на величину крутящего момента, он значительно снижается. Но есть и большой плюс. У этих двигателей нет стопорящего момента. Стопорящий момент — это вращающий момент, создаваемый постоянными магнитами ротора, которые притягиваются к арматуре статора при отсутствии тока в обмотках. Можно легко понять, что это за момент, если попытаться повернуть рукой отключенный шаговый двигатель с постоянным магнитом. Вы почувствуете различимые щелчки на каждом шаге двигателя. В действительности то, что вы ощутите и будет фиксирующим моментом, который притягивает магниты к арматуре статора. Ниже показана работа шагового двигателя с переменным магнитным сопротивлением.
Шаговые двигатели с переменным магнитным сопротивлением обычно имеют шаг, лежащий в диапазоне 5-15°.
Гибридный шаговый двигатель
Данный тип шаговых моторов получил название «гибридный» из-за того, что сочетает в себе характеристики шаговых двигателей и с постоянными магнитами и с переменным магнитным сопротивлением. Они обладают отличными удерживающим и динамическим крутящим моментами, а также очень маленькую величину шага, лежащую в пределах 0.9-5°, обеспечивая великолепную точность. Их механические части могут вращаться с большими скоростями, чем другие типы шаговых моторов. Этот тип двигателей используется в станках ЧПУ high-end класса и в роботах. Главный их недостаток — высокая стоимость.
Обычный мотор с 200 шагами на оборот будет иметь 50 положительных и 50 отрицательных полюсов с 8-ю обмотками (4-мя парами). Из-за того, что такой магнит нельзя произвести, было найдено элегантное решение. Берется два отдельных 50-зубых диска. Также используется цилиндрический постоянный магнит. Диски привариваются один с положительному, другой к отрицательному полюсам постоянного магнита. Таким образом, один диск имеет положительный полюс на своих зубьях, другой — отрицательный.

Два 50-зубых диска помещены сверху и снизу постоянного магнита
Фокус в том, что диски размещаются таким образом, что если посмотреть на них сверху, то они выглядят как один 100-зубый диск! Возвышения на одном диске совмещаются со впадинами на другом.
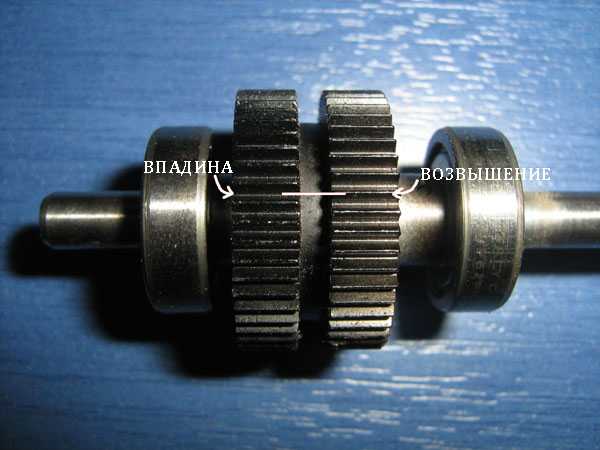
Впадины на одном диске выровнены с возвышениями на другом
Ниже показана работа гибридного шагового двигателя, имеющего 75 шагов на оборот (1.5° на шаг). Стоит заметить, что 6 обмоток спарены, каждая имеет обмотку с противоположной стороны. Вы наверняка ожидали, что катушки расположены под углом в 60° следом друг за другом, но, на самом деле, это не так. Если предположить, что первая пара — это самая верхняя и самая нижняя катушки, тогда вторая пара смещена под углом 60+5° по отношению к первой, и третья смещена на 60+5° по отношению ко второй. Угловая разница и является причиной вращения мотора. Режимы управления с полным и половинным шагом могут использоваться, впрочем как и волновое управление для снижения энергопотребления. Ниже продемонстрировано полношаговое управление. В полушаговом режиме, число шагов увеличится до 150!
Не пытайтесь следовать за обмотками, чтобы понаблюдать, как это работает. Просто сфокусируйтесь на одной обмотке и ждите. Вы заметите, что всякий раз, когда обмотка задействована, есть 3 положительных полюса (красный) в 5° позади, которые притягиваются по направлению вращения и другие 3 отрицательных полюса (синий) в 5° впереди, которые толкаются в направлении вращения. Задействованная обмотка всегда находится между положительным и отрицательным полюсами.
Гибридный шаговый двигатель
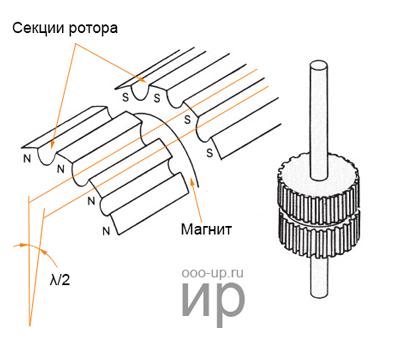
Гибридный шаговый двигатель был создан с целью объединить лучшие свойства обоих шаговых двигателей: и , что позволило добиться меньшего угла шага. Ротор гибридного шагового двигателя представляет из себя цилиндрический постоянный магнит, намагниченный вдоль продольной оси с радиальными зубьями из магнитомягкого материала.
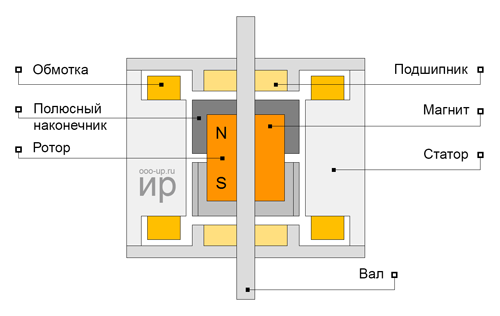
Конструкция гибридного шагового двигателя (осевой разрез)
Статор обычно имеет две или четыре фазы распределенные между парами явно выраженных полюсов. Обмотки статора могут иметь центральное ответвление для униполярного управления. Обмотка с центральным ответвлением выполняется с помощью бифилярной намотки.
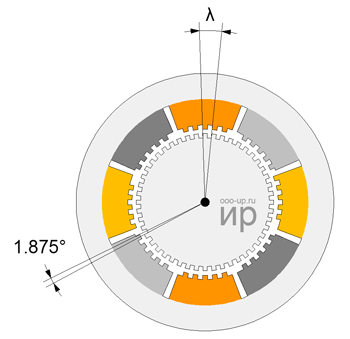
Гибридный шаговый двигатель (радиальный разрез)
Заметьте что 48 зубьев на одной секции ротора смещены на половину зубцового деления λ относительно другой секции (рисунок ниже). Из-за этого смещения ротор фактически имеет 96 перемежающихся полюсов противоположной полярности.
Ротор гибридного шагового двигателя
Зубья на полюсах статора соответствуют зубьям ротора, исключая отсутствующие зубья в пространстве между полюсами. Таким образом один полюс ротора, скажем южный полюс, можно выровнять со статором в 48 отдельных положениях. Однако зуб южного полюса ротора смещен относительно северного зуба на половину зубцового деления. Поэтому ротор может быть выставлен со статором в 96 отдельных положениях.
Соседние фазы статора гибридного шагового двигателя смещены друг относительно друга на одну четверть зубцового деления λ. В результате ротор перемещается с шагом в четверть зубцового деления во время переменного возбуждения фаз. Другими словами для такого двигателя на один оборот приходится 2×96=192 шага.
- Шаговый гибридный двигатель имеет:
- шаг меньше, чем у реактивного двигателя и двигателя с постоянными магнитами;
- ротор — постоянный магнит с тонкими зубьями. Северные и южные зубья ротора смещены на половину зубцового деления для уменьшения шага;
- полюсы статора имеют такие же зубья как и ротор;
- статор имеет не менее чем две фазы;
- зубья соседних полюсов статора смещены на четверть зубцового деления для создания меньшего шага.
ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
Н.И.Волков, В.П.Миловзоров. Электромашинные устройства автоматики: Учеб. для вузов по спец. «Автоматика и телемеханика».- 2-е изд.- М.:Высш.шк., 1986.
Преимущества схемы тиристорного преобразователя: автор В Соломыков
Эта разработка позволяет максимально эффективно сохранить мощность асинхронного двигателя при его подключении в однофазную сеть. Она является прообразом современных частотных преобразователей, но выполнена на старой и доступной элементной базе.
Тиристорный преобразователь позволяет сделать формы напряжений на каждой фазе очень похожими на идеальные, гармоничные синусоиды, под которые и создается асинхронный электродвигатель.
Питание от сети 220 вольт происходит через защиту — автоматический выключатель SF1 и диодный мост на базе Д233В.
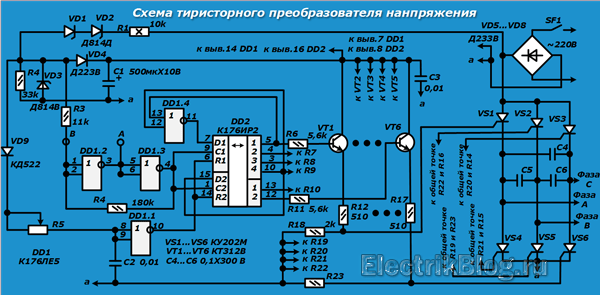
Силовые выходные цепи образуются работой тиристорных ключей VS1-VS6.
Сдвиг фаз токов для питания каждой обмотки двигателя своим напряжением создается работой двух микросхем:
- DD1 — К176ЛЕ5;
- DD2 — К176 ИР2.
Они формируют такты сдвига напряжений сигналов в регистрах, а их сочетания подаются на входы управления тиристорами VS1÷VS6 через индивидуальные транзисторы VT1÷VT6 по запланированной временной диаграмме.
Логическая часть
Микросхема К176ИР2 вырабатывает по 2 раздельных 4-х разрядных регистра сдвига с четырьмя выходами Q от любого триггера. Каждый триггер двухступенчатый, типа D.
Ввод данных в регистр происходит через вход D. Также имеется вход для тактовых импульсов типа C. Они поступают через вход D 1-го триггера, а затем смещаются по ходу вправо на один такт.
Обнуление данных на выходе регистра Q происходит при поступлении на вход R (асинхронный сброс) напряжения логического уровня.
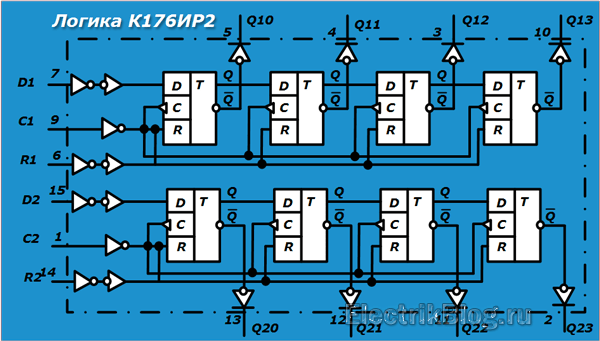
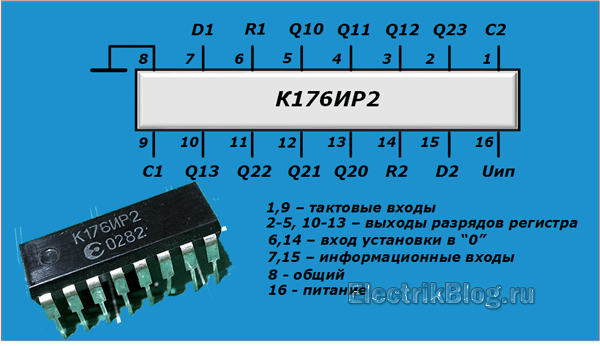
Таблица данных К176ИР2 и состояний регистров
|
Число разрядов |
4х2 |
Входы |
Выход |
|||
|
Сторона сдвига |
Направо |
C |
D |
R |
Q0 |
Qn |
|
Тип ввода |
Последовательно |
∫ |
H |
Н |
H |
Qn-1 |
|
Тип вывода |
Параллельно |
∫ |
B |
H |
B |
Qn-1 |
|
Тактовая частота |
2,5MHz |
∫ |
X |
H |
Q1 |
Qn не меняется |
|
Рабочая температура |
-45÷+85 |
X |
X |
B |
H |
H |
Работой микросхемы К176ИР2 управляет элементы DD1 на сборке К176ЛЕ5.
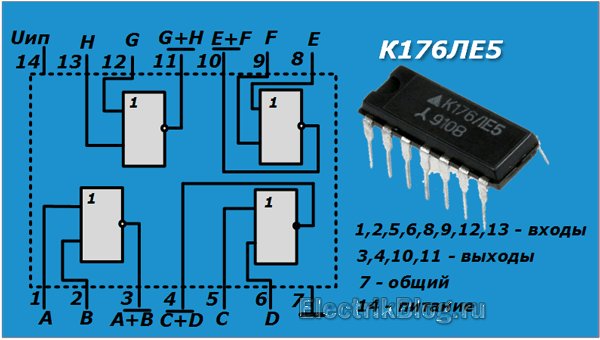
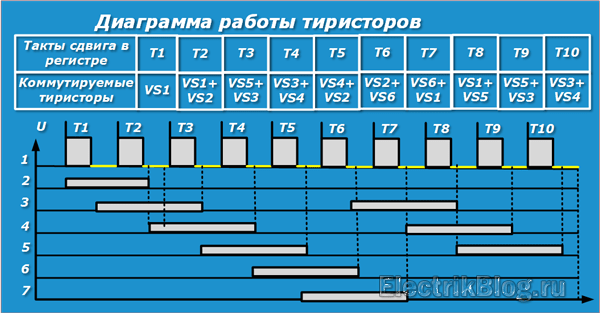
Они обеспечивают подачу импульсов на управляющие электроды тиристоров по следующей временной диаграмме.
Силовая часть схемы, принципы ее управления и наладки
При подаче напряжения на схему обнуляется регистр сдвига микросхемы DD2 до окончания заряда емкости C2 по цепочке через R5. В момент заряда срабатывает логический элемент DD1.1, разрешающий сдвиг импульса регистру DD2.
При переходе регистра в положение «логической 1» подается сигнал на базу его биполярного транзистора (VT1÷VT6). Последний открывается и подает команду на управляющий электрод своего тиристора.
В результате работы этой цепочки между выходными силовыми клеммами создается трехфазное напряжение (довольно близкое к синусоидальной форме) со сдвигом векторов между собой на 120 градусов.
Асинхронный двигатель, работающий по этой схеме, развивает наибольшую мощность по сравнению с тремя предыдущими вариантами.
Частота коммутации тиристоров подбирается экспериментально при наладке за счет выбора номиналов емкостей С4, С5, С6. Их номиналы зависят от мощности электродвигателя.
Емкость конденсаторов предварительно рассчитывают по формуле:
При номинальной частоте вращения ротора выставляют n=1.
Резисторы R3 и R4 после окончания настройки устройства демонтируют, а вместо R4 запаивают конденсатор с емкостью 0,68 микрофарад.
Затем к точкам A и B припаивают регулировочный резистор на 15 килоом. Его назначение — точное выставление частоты вращения ротора у двигателя.
Все четыре схемы, которые я привел, не содержат дефицитных деталей и могут быть собраны в домашних условиях людьми с начальным уровнем навыков электрика.
Для продвинутых мастеров могу порекомендовать схему, по которой выполнил подключение трехфазного двигателя к однофазной сети без конденсаторов на современной электронной базе владелец сайта Радиокот.
Он фактически собрал частотный преобразователь, которому отдал много времени. К тому же простым паяльником и обычным цифровым мультиметром там отделаться не получится. Нужны практические навыки, специальный инструмент, осциллограф для наладки.
Все это я написал, чтобы подвести вас к выводу: запустить асинхронный двигатель на 3 фазы в сеть 220 вольт без потерь мощности можно только через промышленный частотный преобразователь.
Рекомендую посмотреть два коротких видеоролика по этой теме и сравнить результат.
Видео владельца Kick Ass с самодельным регулятором по схеме В Голик.
https://youtube.com/watch?v=mu4V84Pq10I
Видео владельца Capricorn WorkShop о самом простом частотном преобразователе.
https://youtube.com/watch?v=1Q_Xa59Pzb4
Выводы сделайте сами. А если остались еще вопросы и неясности, или заметили случайную ошибку, то воспользуйтесь разделом комментариев. Обязательно обсудим.
5.2. ПРИНЦИП ОБРАЗОВАНИЯ ВРАЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ МАШИНЫ
На статоре трехфазного
двигателя расположены 3 обмотки (фазы), которые смещены в пространстве по отношению
друг к другу на 120 эл. градусов. Токи, подаваемые в фазные обмотки, отодвинуты
друг от друга во времени на 1/3 периода (рис. 5.2.1.).
Используя график изменения
трехфазного тока, проставим на нем несколько отметок времени; tl,
t2, t3,…tn. Наиболее удобными будут отметки,
когда один из графиков пересекает ось времени.
Теперь рассмотрим электромагнитное
состояние обмоток статора в каждые из принятых, моментов времени.
Рассмотрим вначале точку
t1. Ток в фазе А равен нулю, в фазе С он будет положительным — (+)
, а в фазе В — отрицательным (·) (рис. 5.2.2, а).
Поскольку каждая фазная обмотка имеет замкнутую форму, то конец фазной обмотки
В-У будет иметь противоположный знак, т.е. У — (+), а конец Z обмотки C-Z — (·).
Известно, что вокруг проводника
с током всегда образуется магнитное поле. Направление его определяется правилом
правоходового винта («буравчика»).
Проведем силовую магнитную
линию вокруг проводников С и У и, соответственно, В и Z (см. штриховые линии
на рис. 5.2.2 a).
Рассмотрим теперь момент
времени t2. В это время тока в фазе В не будет. В проводнике А фазы
А-Х он будет иметь знак (+), а в проводнике С фазы C-Z он будет иметь знак (·).
Теперь проставим знаки:
в проводнике Х — (·), а в проводнике Z — (+).
Проведем силовые линии
магнитного поля в момент времени t2 (рис. 5.2.2,б). Заметим при этом,
что вектор F совершил поворот.
Аналогичным образом проведем
анализ электромагнитного состояния в фазных обмотках статора в момент времени
t3,…tn (рис. 5.2.2, б, в, г, д).
Из рисунков 5.2.2 наглядно видно, что магнитное поле в обмотках и его поток Ф
совершают круговое вращение.
Частота вращения магнитного поля статора определяется следующей формулой:
где f — частота тока питающей сети, Гц; p — число пар полюсов.
Если принять f=50 Гц, то
для различных чисел пар полюсов (р=1, 2, 3, 4, )
n1=3000, 1500, 1000, 750, об/мин.
Системы управления с разомкнутой цепью (без обратной связи)
Чаще всего это оборудование управляется специальной электронной схемой. Питается оно только от источника переменного тока. Такие двигатели часто используются в схемах, где требуется управление частотой вращения. Это позволяет избежать необходимости использования дорогого и сложного контура обратной связи, да и защита электродвигателя становится проще (требуется только предусмотреть быстрое обесточивание).
Данный принцип работы применяют в схемах с разомкнутой связью. Следует помнить, что указанная схема (без контура обратной связи) выгодна с экономической точки зрения, но у нее есть ряд существенных ограничений.
Так, поворот ротора является достаточно нестабильным, колебательным, отчего частота вращения и прочие характеристики движения ни в коем случае не могут быть настолько же точными, каковыми они являются в двигателях постоянного тока с контуром обратной связи. Для расширения сферы применения шагового двигателя требуется изыскивать способы снижения вибрации.
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003

Описание драйвера шаговых двигателей UNL2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
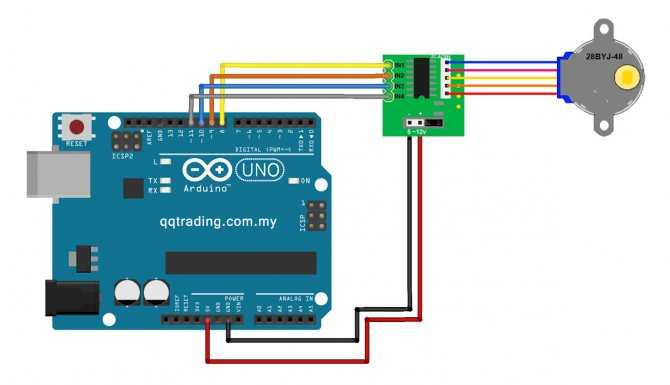
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
Подключение шагового двигателя к Ардуино
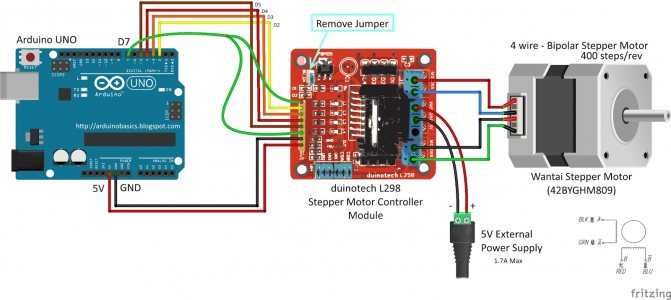
Еще один вариант схемы с использованием L298:
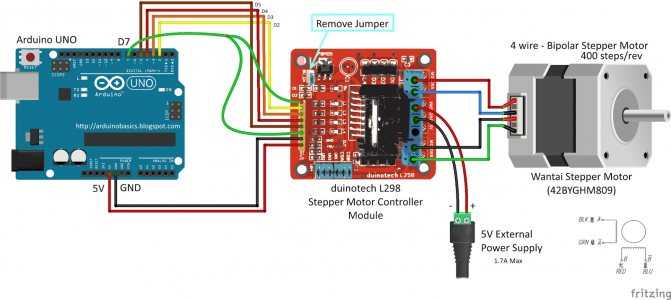
Подключение шагового двигателя к Ардуино на базе L298
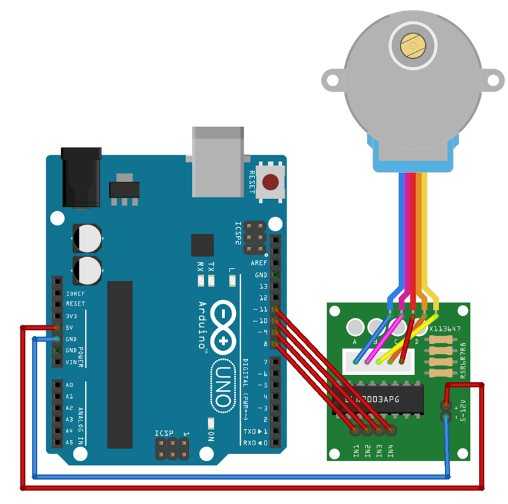
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
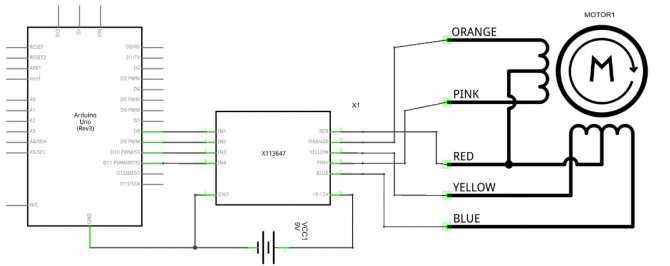
Принципиальная схема подключения.
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.
Требования
Сколько рабочих циклов в минуту нужно сделать двигателю? Какой крутящий момент нужен? Какая максимальная скорость требуется?
Эти критические вопросы не могут быть решены просто путем выбора двигателя с заданной мощностью из каталога.
Выходная мощность электрической машины представляет собой комбинацию крутящего момента и скорости, которая может быть рассчитана путем умножения скорости, крутящего момента и констант, вносящих поправки в режим работы электрической машины (естественно это все очень поверхностно. Необходимы точные математические расчеты для каждого типа электродвигателя).
Однако из-за характера этого расчета существует множество различных комбинаций крутящего момента и скорости (кратковременная работа с перегрузкой или недогрузкой), которые влияют на выходную мощность. Таким образом, разные двигатели с одинаковой номинальной мощностью могут работать по-разному из-за комбинации скорости и крутящего момента.
Инженеры должны знать, насколько быстро должен двигаться груз определенного размера, прежде чем уверенно выбирать двигатель, который будет работать лучше. Выполняемая работа также должна попадать в кривую крутящего момента / скорости двигателя. Эта кривая (механическая характеристика электродвигателя) показывает, как крутящий момент двигателя изменяется в зависимости от скорости. Используя предположения «наихудшего случая» (другими словами, определяя максимальный / минимальный крутящий момент и скорость, которые потребуются для работы), инженеры могут быть уверены, что выбранный двигатель имеет механическую характеристику, способную приводить в движение груз при этом не выходить с номинального режима работы (например, перегрев, если мощность электрической машины занижена).

Инерция нагрузки является еще одним фактором, который следует учитывать, прежде чем погрузиться в процесс принятия решения о выборе двигателя. Необходимо рассчитать коэффициент инерции, который представляет собой сравнение инерции нагрузки и инерции двигателя. Одно эмпирическое правило гласит, что если инерция нагрузки в 10 раз превышает инерцию ротора, то настройка электрический машины может быть куда более сложной и производительность производственного механизма может ухудшиться. Но это правило варьируется не только от технологии к технологии, но и от поставщика к поставщику и даже от продукта к продукту
Важность точности позиционирования рабочего органа также повлияет на это решение. Некоторые механизмы поддерживают соотношение 30: 1, в то время как прямые привода работают до 200: 1
Многим инженерам не нравится определять размер двигателя, который превышает соотношение 10 к 1.
Наконец, существуют ли физические ограничения, которые ограничивают тип электродвигателя. Электрические машины бывают разных форм и размеров. В некоторых случаях электродвигатели являются большими и громоздкими, и есть определенные операции, которые не могут вместить двигатель определенного размера. Прежде чем принять обоснованное решение о наилучшем типе машины, ее массогабаритные показатели должны быть оценены и поняты.
Как только инженеры ответят на все эти вопросы — скорость, крутящий момент, мощность, инерция нагрузки и массогабаритные показатели, — они смогут сосредоточиться на наиболее эффективном по размеру двигателе. Однако процесс принятия решений на этом не заканчивается. Инженеры также должны выяснить, какой тип электродвигателя лучше всего подходит для применения. В течение многих лет выбор типа сводился к одному из двух вариантов для большинства применений: серводвигатель или шаговый двигатель с разомкнутым контуром управления.

Что такое асинхронный двигатель и принцип его действия
Любой электродвигатель — устройство для преобразования электрической энергии в механическую. Электрический двигатель состоит из неподвижной (статор) и подвижной части (ротор). Строение статора таково, что он имеет вид полого цилиндра, внутри которого имеется обмотка. В это цилиндрическое отверстие вставляется подвижная часть — ротор. Он также имеет вид цилиндра, но меньшего размера. Между статором и ротором имеется воздушный зазор, позволяющий ротору свободно вращаться. Ротор вращается из-за наводимых магнитным полем статора токов. По способу вращения двигатели делят на синхронные и асинхронные.

Так выглядит разобранный асинхронный двигатель с короткозамкнутым ротором
Асинхронный электродвигатель отличается тем, что частота вращения ротора и магнитного поля, создаваемого статором, у него неравны. То есть, ротор вращается несинхронно с полем, что и дало название этому типу машин. Характерно, в рабочем режиме скорость его вращения меньше. Второе название этого типа двигателей — индукционные. Это название связано с тем, что движение происходит за счёт наводимых на нём токов индукции.

Асинхронный двигатель в разобранном виде: основные узлы и части
Коротко описать принцип работы асинхронного двигателя можно так. При включении мотора на обмотки статора подаётся ток, из-за чего возникает переменное магнитное поле. В область действия силовых линий этого попадает ротор, который начинает вращаться вслед за переменным полем статора.
https://youtube.com/watch?v=uXwamyaiUKo
Использование
В машиностроении наибольшее распространение получили высокомоментные двухфазные гибридные шаговые электродвигатели с угловым перемещением 1,8°/шаг (200 шагов/оборот) или 0,9°/шаг (400 шаг/об). Точность выставления шага определяется качеством механической обработки ротора и статора электродвигателя. Производители современных шаговых электродвигателей гарантируют точность выставления шага без нагрузки до 5 % от величины шага.
Дискретность шага создаёт существенные вибрации, которые в ряде случаев могут приводить к снижению крутящего момента и возбуждению механических резонансов в системе. Уровень вибраций удаётся снижать при использовании режима дробления шага или при увеличении количества фаз.
Режим дробления шага (микрошаг) реализуется при независимом управлении током обмоток шагового электродвигателя. Управляя соотношением токов в обмотках можно зафиксировать ротор в промежуточном положении между шагами. Таким образом можно повысить плавность вращения ротора и добиться высокой точности позиционирования. Качество изготовления современных шаговых двигателей позволяет повысить точность позиционирования в 10—20 раз.
Шаговые двигатели стандартизованы (NEMA) по посадочным размерам и размеру фланца: NEMA 17, NEMA 23, NEMA 34 и др. — размер фланца 42, 57, 86 и 110 мм соответственно. Шаговые электродвигатели NEMA 23 могут создавать крутящий момент до 30 кгс⋅см, NEMA 34 до 120 кгс⋅см и до 210 кгс⋅см для двигателей с фланцем 110 мм.
Шаговый электродвигатель с интегрированным контроллером
Шаговые двигатели создают сравнительно высокий момент при низких скоростях вращения. Момент существенно падает при увеличении скорости вращения. Однако, динамические характеристики двигателя могут быть существенно улучшены при использовании драйверов со стабилизацией тока на основе ШИМ.
Шаговые электродвигатели применяются в приводах машин и механизмов, работающих в старт-стопном режиме, или в приводах непрерывного движения, где управляющее воздействие задаётся последовательностью электрических импульсов, например, в станках с ЧПУ. В отличие от сервоприводов, шаговые приводы позволяют получать точное позиционирование без использования обратной связи от датчиков углового положения.
Шаговые двигатели применяются в устройствах компьютерной памяти — НГМД, НЖМД, устройствах чтения оптических дисков.
Датчик поворота
Шаговые двигатели с постоянными магнитами могут использоваться в качестве датчиков угла поворота благодаря возникновению ЭДС на обмотках при вращении ротора. При этом, несмотря на удобство пользования и хорошую точность и повторяемость, необходимо учитывать, что:
- без вращения вала нет ЭДС; определить положение стоящего вала нельзя;
- возможна остановка вала в зоне неустойчивого равновесия (промежуточно между полюсами) ШД. Последующий пуск вала приведёт к тому, что, в зависимости от чувствительности компаратора, будет пропуск этого полюса, или два импульса вместо одного. В обоих случаях все дальнейшие отсчёты будут с ошибкой на один шаг. Для практически полного, но не 100 %, устранения такого поведения необходимо применить муфту с соответствующим гистерезисом (угловым люфтом).