
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
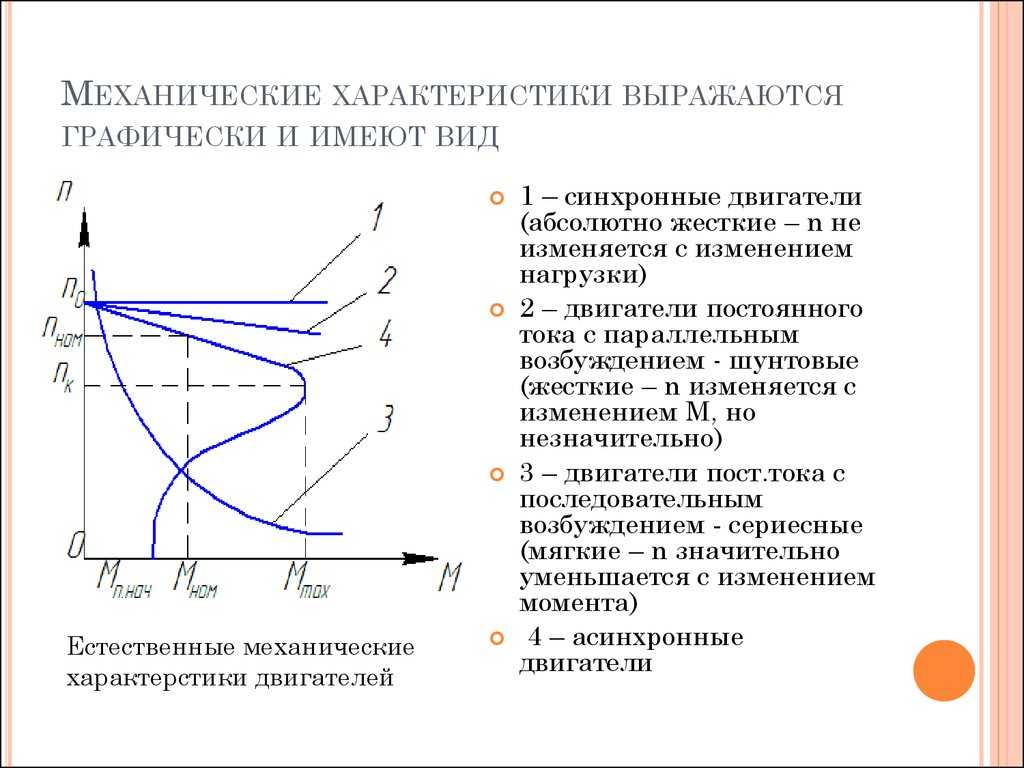
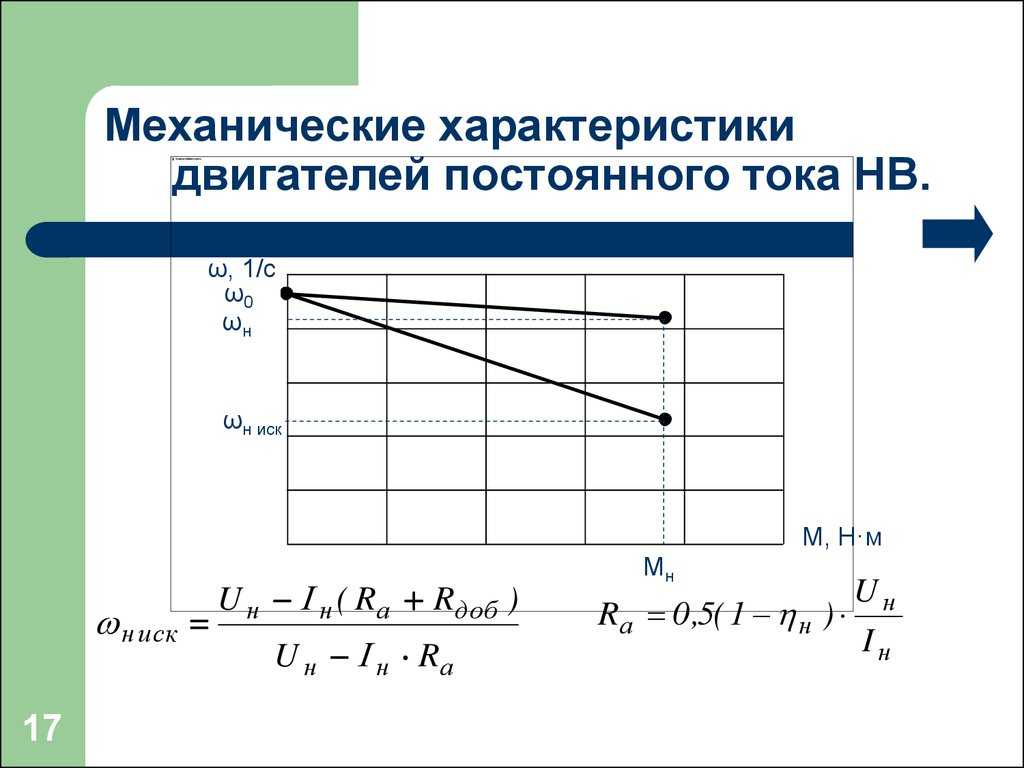
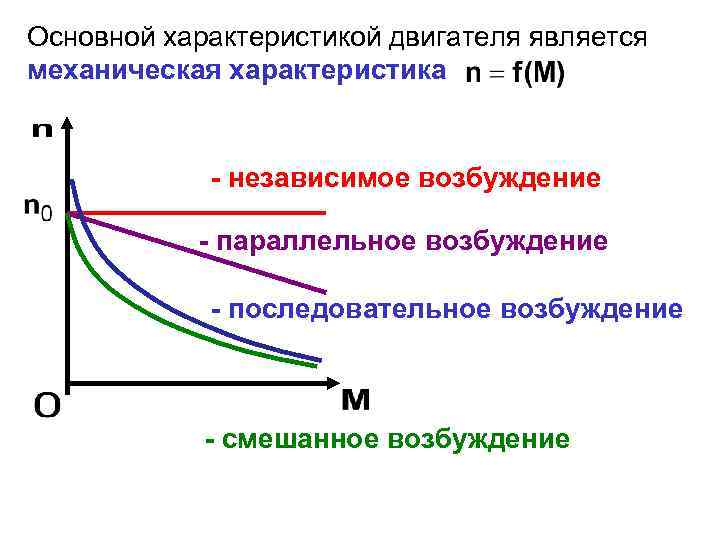
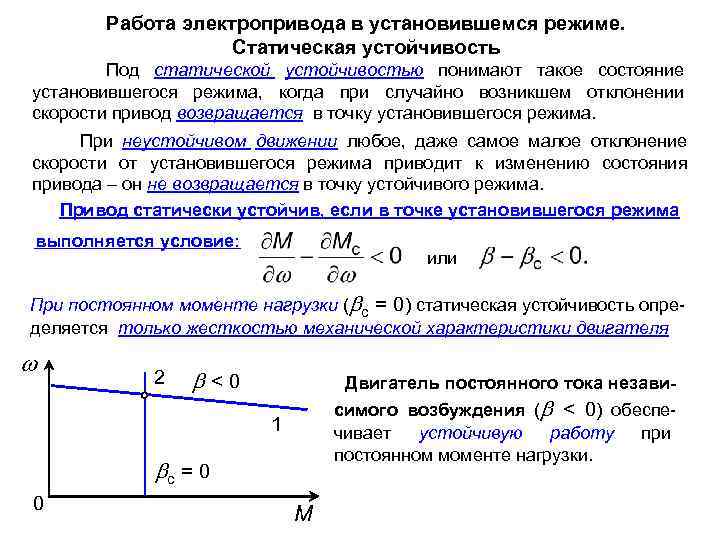
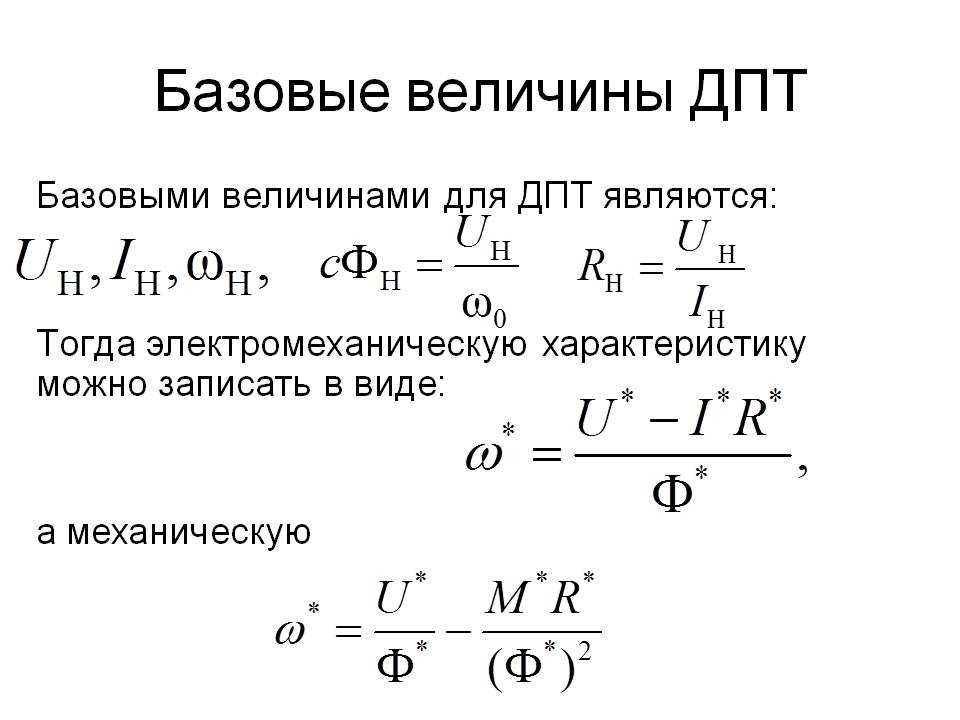
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Типы электродвигателей
Коллекторные электродвигатели
Коллекторная машина — вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором . В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.
Бесколлекторные электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина — вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов .
Классификация электродвигателей
| Вращающийся электродвигатель | ||||
|---|---|---|---|---|
| Само коммутируемый | Внешне коммутируемый | |||
| С механической коммутацией (коллекторный) | С электронной коммутацией1 (вентильный2, 3) | Асинхронный электродвигатель | Синхронный электродвигатель | |
| Переменного тока | Постоянного тока | Переменного тока4 | Переменного тока | |
|
|
|
|
|
| Простая электроника | Выпрямители,транзисторы | Более сложнаяэлектроника | Сложная электроника (ЧП) |
Примечание:
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, — датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря .
- Вентильный электродвигатель постоянного тока — электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля .
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
Аббревиатура:
- КДПТ — коллекторный двигатель постоянного тока
- БДПТ — бесколлекторный двигатель постоянного тока
- ЭП — электрический преобразователь
- ДПР — датчик положения ротора
- ВРД — вентильный реактивный двигатель
- АДКР —
- АДФР —
- СДОВ — синхронный двигатель с обмоткой возбуждения
- СДПМ — синхронный двигатель с постоянными магнитами
- СДПМП —
- СДПМВ —
- СРД — синхронный реактивный двигатель
- ПМ — постоянные магниты
- ЧП — частотный преобразователь
Особенности конструкции
Двигатели постоянного тока представлены вращающимися нагнетательными элементами, которые размещаются на поверхности статически закрепленной станины. Устройства подобного типа получили широкое применение и эксплуатируются при необходимости обеспечивать разнообразие скоростного регулирования в условиях стабильности вращательных движений привода.
С конструктивной точки зрения все виды ДПТ представлены:
- роторной или якорной частью в виде большого количества катушечных элементов, покрытых специальной токопроводящей обмоткой;
- статичным индуктором в виде стандартной станины, дополненной несколькими магнитными полюсами;
- функциональным щеточным коллектором цилиндрической формы, располагающимся на валу и имеющим медную пластинчатую изоляцию;
- статично зафиксированными контактными щетками, используемыми с целью подведения достаточного количества электротока на роторную часть.
Как правило, электрические двигатели ПТ оснащаются специальными щетками графитового и медно-графитного типа. Вращательные движения вала провоцируют замыкание и размыкание контактной группы, а также способствуют искрению.
Определенное количество механической энергии поступает от роторной части к другим элементам, что обусловлено наличием передачи ременного типа.
Физический принцип работы электродвигателя постоянного тока
Если мы вспомним закон Ампера, то будет понятно, что на проводник с током в магнитном поле действует некоторая сила. Именно это обстоятельство позволяет получить вращающийся якорь.
Вспомним самый простой опыт, который показывают школьникам. Рамку с током помещают в магнитное поле и она начинает двигаться. Правда двигается она недолго, а скорее дергается. Всему виной несовпадение векторов. Размести мы магниты слегка иначе и получили бы постоянное движение.
Силы Ампера, действующие на боковые стороны рамки, будут создавать вращающий момент, величина которого пропорциональна магнитной индукции, силе тока в рамке, ее площади S и зависит от угла a между вектором магнитной индукции и нормалью к рамке.
Рамка с током в магнитном поле
В представленной ситуации рамка будет вращаться только тогда, когда вектора Fа будут не деформировать её, а придавать вращательное движение.
Вот так крутится рамка
Для этого в данном примере рамку нужно повернуть на 90 градусов. Теперь представим, что якорь нашего двигателя весь состоит из таких рамок, их очень много. Это улучшит процесс движения.
Вот и получился самый простой электрический двигатель постоянного тока.
Теперь представим, как будет выглядеть поведение такого двигателя при включении в цепь с переменным током. Он начнет танцевать в разные стороны. Ведь переменный электрический ток отличается тем, что регулярно меняет своё направление. Рамка с током, через которую он проходит, будет также менять направление своего движения. Крутиться равномерно такая штука не сможет. Поэтому, в переменных сетях используется двигатели переменного тока. Двигатель постоянного тока конечно же сможет работать в переменной сети, но для этого нужно использовать выпрямитель перед ним.
Правда бывают и универсальные электродвигатели, которые одинаково комфортно юзаются и там, и там. Но про это чуть позже.
Основные параметры электродвигателя постоянного тока
,
- где M — , Нм,
- – постоянная момента, Н∙м/А,
- I — сила тока, А
Постоянная ЭДС
Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока.
последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения:
,
- где — электродвижущая сила, В,
- – постоянная ЭДС, В∙с/рад,
- — угловая частота, рад/с
Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц.
Постоянная электродвигателя
Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую.
,
- где — постоянная электродвигателя, Нм/√Вт,
- R — сопротивление обмоток, Ом,
- – максимальный момент, Нм,
- — мощность потребляемая при максимальном моменте, Вт
Справка: Постоянная электродвигателя вместе с размерами электродвигателя являются основными параметрами для инженера при выборе электродвигателя с лучшим соотношением мощность / объем.
Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят , при этом постоянная электродвигателя останется не изменой.
,
где — жесткость механической характеристики электродвигателя постоянного тока
Напряжение электродвигателя
Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле):
,
где U — напряжение, В.
Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом:
Соотношение между и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя.
Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях .
Мощность электродвигателя постоянного тока
Упрощенная модель электродвигателя выглядит следующим образом:
- где I – сила тока, А
- U — напряжение, В,
- M — , Н∙м
- R — сопротивление токопроводящих элементов, Ом,
- L — индуктивность, Гн,
- Pэл — электрическая мощность (подведенная), Вт
- Pмех — (полезная), Вт
- Pтеп — тепловые потери, Вт
- Pинд — мощность затрачиваемая на заряд катушки индуктивности, Вт
- Pтр — потери на трение, Вт
Механическая постоянная времени
Механическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где — механическая постоянная времени, с
Классификация электроприводов
По количеству и связи исполнительных, рабочих органов:
- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
Советуем изучить — Электромагнитная совместимость при использовании преобразователей частоты
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Устройство асинхронной машины
Схематичное устройство асинхронной машины
Классическая асинхронная машина состоит из 2 основных частей: ротора (подвижной) и статора (неподвижной). Три отдельные фазы составляют обмотку статора. С1, С2 и С3 — обозначения начала фаз. С3, С4 и С5 — соответственно концы фаз. Все они подсоединены к клеммному разъему по схеме звезда или треугольник, что показано на рисунках а, б, в. Схему выбирают учитывая паспортные данные двигателя и сетевое напряжение.
Статор создает внутри электродвигателя магнитное поле, которое постоянно вращается.
Ротор различают короткозамкнутый и фазный.
В короткозамкнутом скорость вращения не регулируется. Конструкция с ним проще и дешевле. Однако пусковой момент у него слишком мал по сравнению с машинами, у которых фазный ротор. Здесь скорость вращения регулируется за счет возможности ввода дополнительного сопротивления.
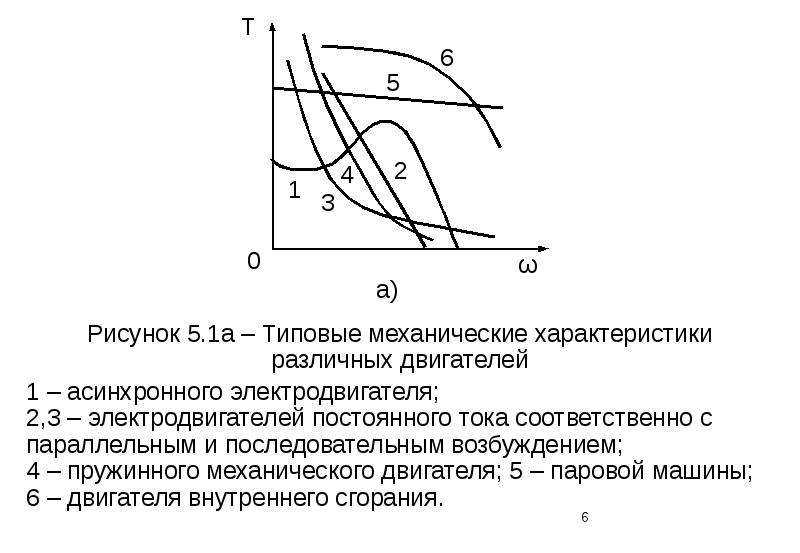
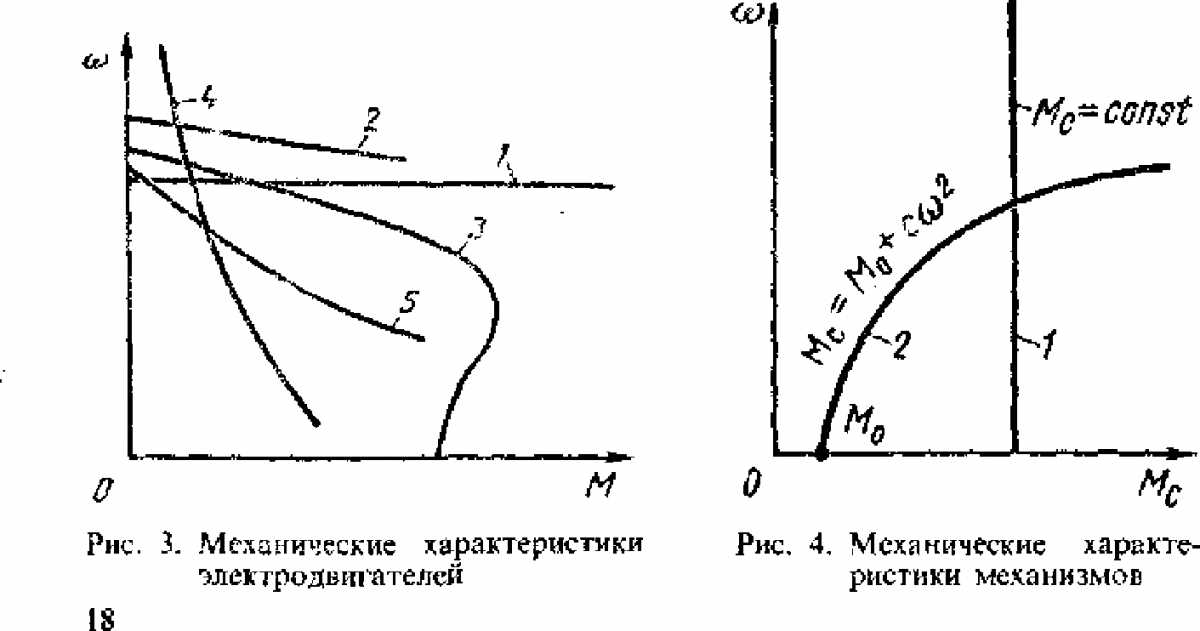
Механическая характеристика
На сегодняшний день эксплуатируются электромоторы ПТ нескольких категорий, имеющие различные виды возбуждения:
- независимого типа, при котором обмоточное питание определяется независимым источником энергии;
- последовательного типа, при котором подключение якорной обмотки выполняется в последовательном направлении с обмоточным элементом возбуждения;
- параллельного типа, при котором роторная обмотка подключается в электрической цепи в параллельном для источника питания направлении;
- смешанного типа, основанном на наличии нескольких последовательных и параллельных обмоточных элементов.
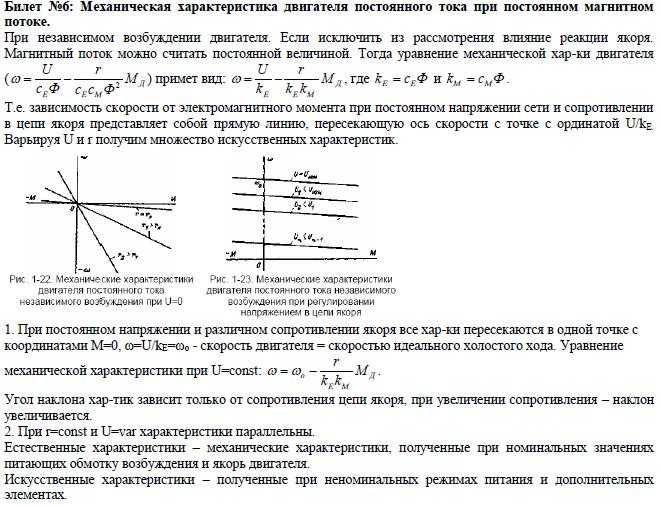
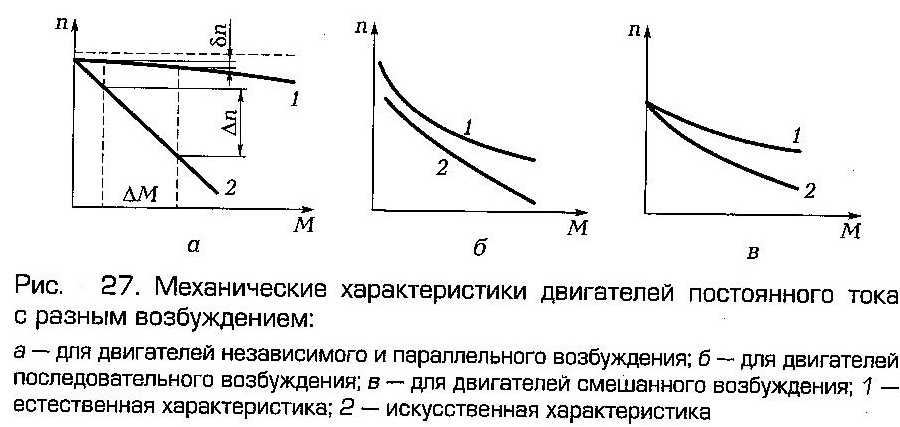
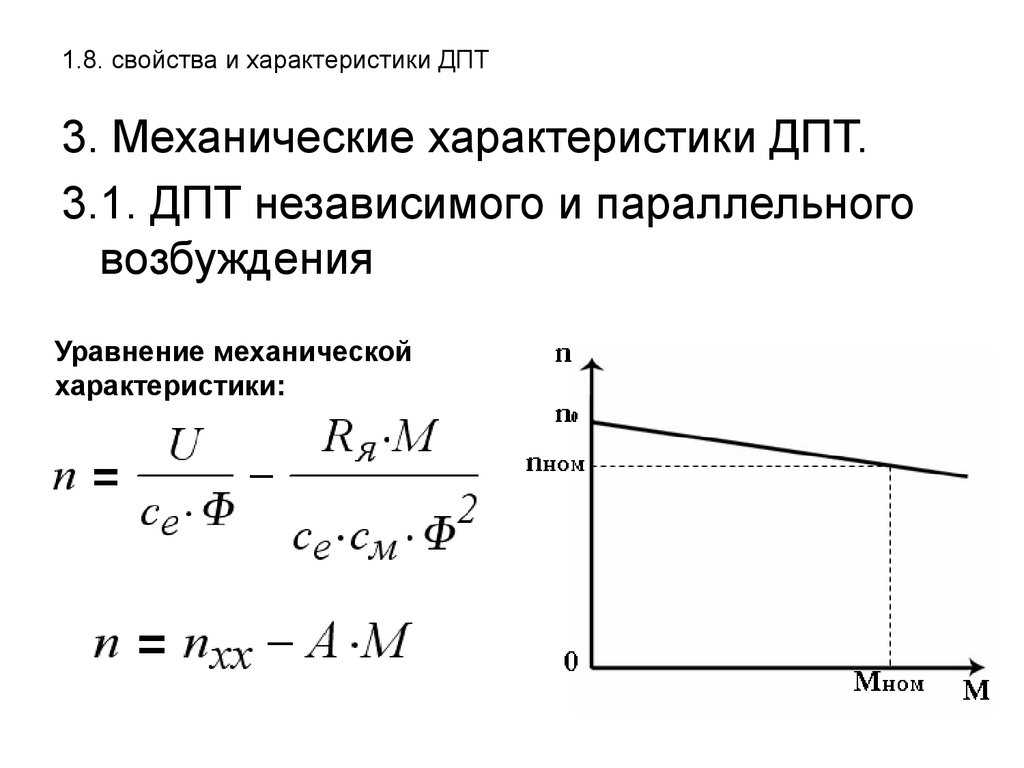
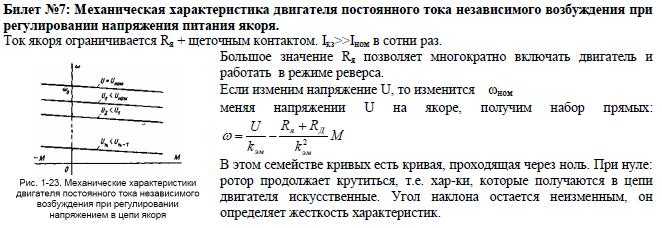
Механическая характеристика двигателя постоянного тока независимого возбуждения ДПТ
Благодаря особым механическим характеристикам устройства с постоянными токовыми величинами способны легко переносить негативные внешние воздействия, что объясняется закрытым корпусом с уплотнительными элементами, абсолютно исключающими попадание влаги внутрь конструкции.
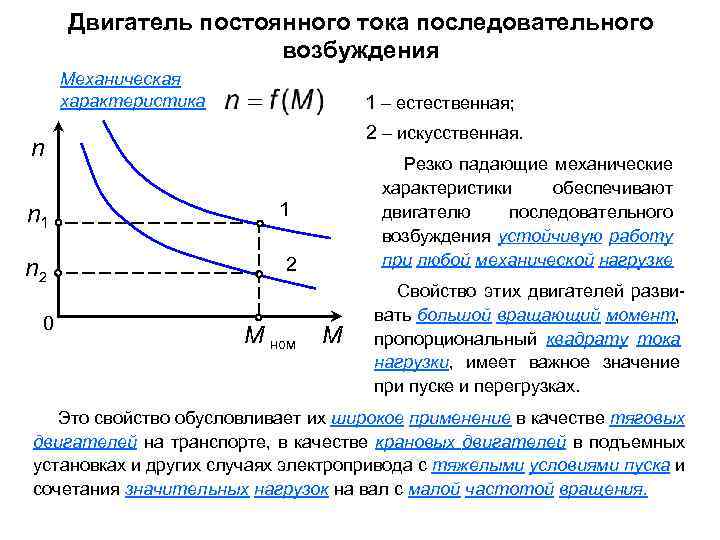
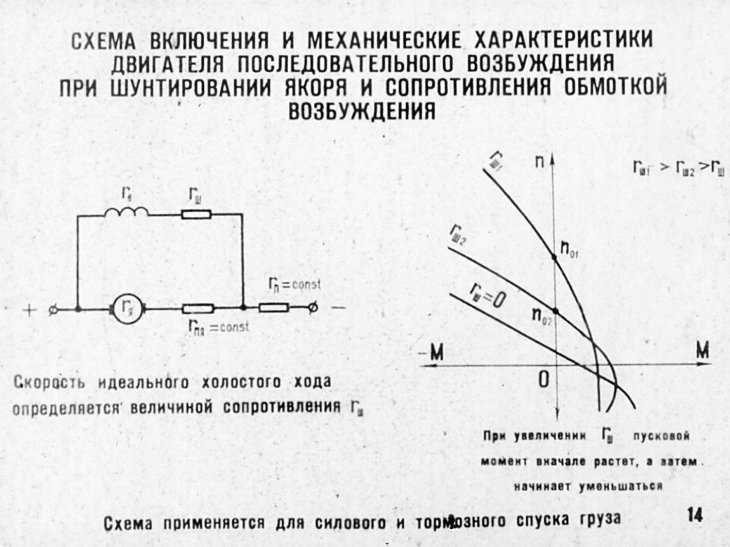
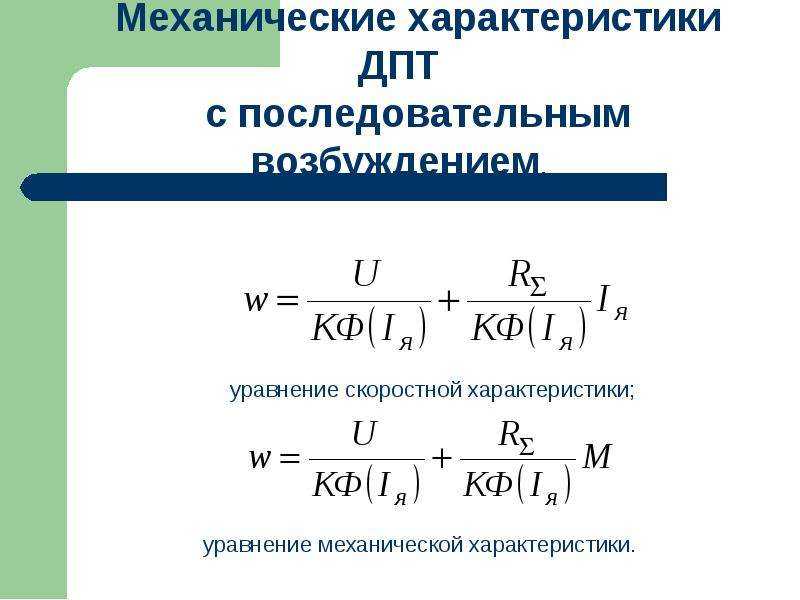
Модели последовательного возбуждения
ДПТ с ПТВ представляют собой устройство электрического типа с постоянными токовыми величинами, имеющими обмотку возбуждения, последовательно подключенную к якорной обмотке. Данный тип движков характеризуется справедливостью следующего равенства: током, протекающим в обмотке якоря, равным током обмоточного возбуждения, или I=Iв=Iя.
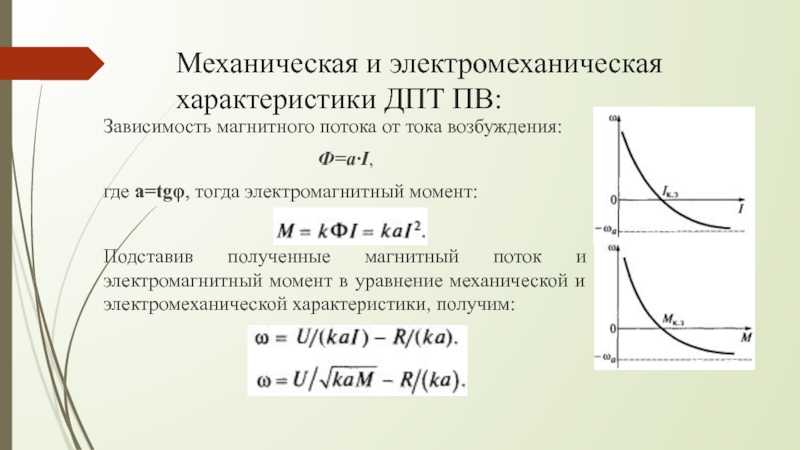
Механические характеристики при последовательном и смешанном возбуждении
При использовании последовательного типа возбуждения:
- n — показатели частоты вращения вала в условиях холостого хода;
- Δn — показатели изменения частоты вращения в условиях механической нагрузки.
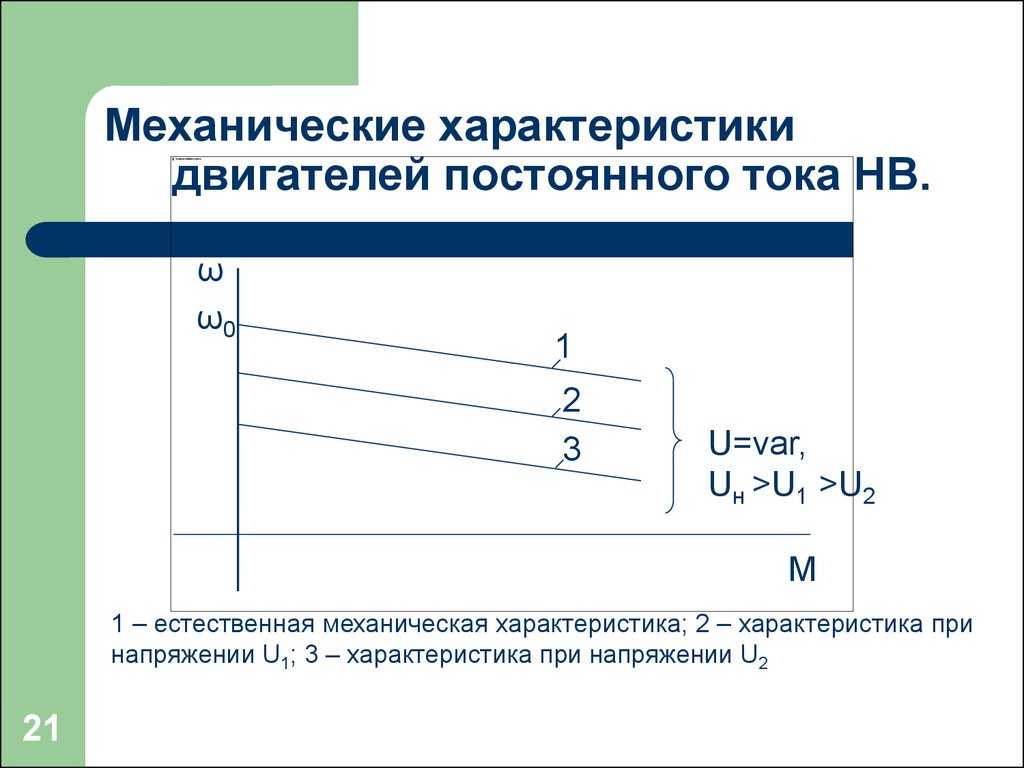
Смещение механических характеристик вдоль оси ординат позволяет им оставаться в полностью параллельном расположении друг другу, благодаря чему регулирование вращательной частоты при изменении данного напряжения U, подведенного к якорной цепи, становится максимально благоприятным.
Рекомендуемые файлы
FREE
ТНУ 16-05
Подъёмно-транспортные машины (ПТМ)
Домашнее задание (вариант №16)
Транспортно-складская система завода (МТ-3)
FREE
ТНУ 16-04
Подъёмно-транспортные машины (ПТМ)
FREE
Основные принципы построения автоблокировки переменного тока
Транспорт
FREE
Редуктор_Черв-глобоидный_(ГОСТ21164-75)
Подъёмно-транспортные машины (ПТМ)
FREE
Богачев ВН (семинары 2016г)
Подъёмно-транспортные машины (ПТМ)
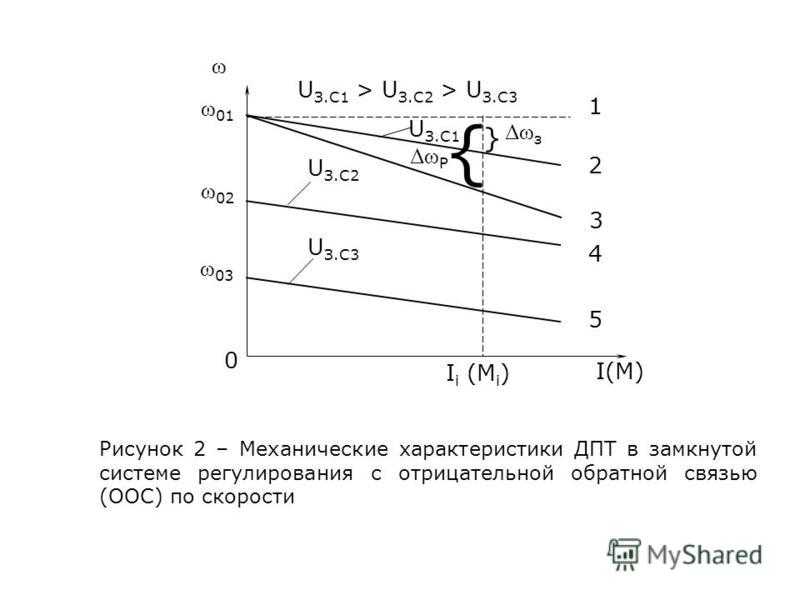
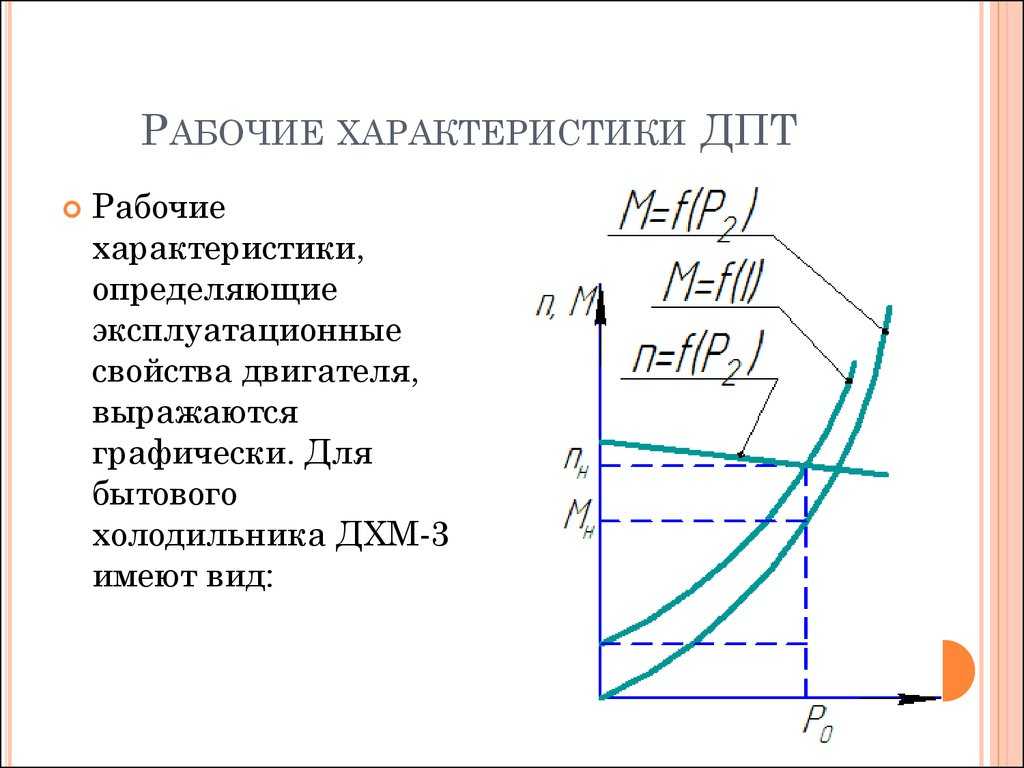
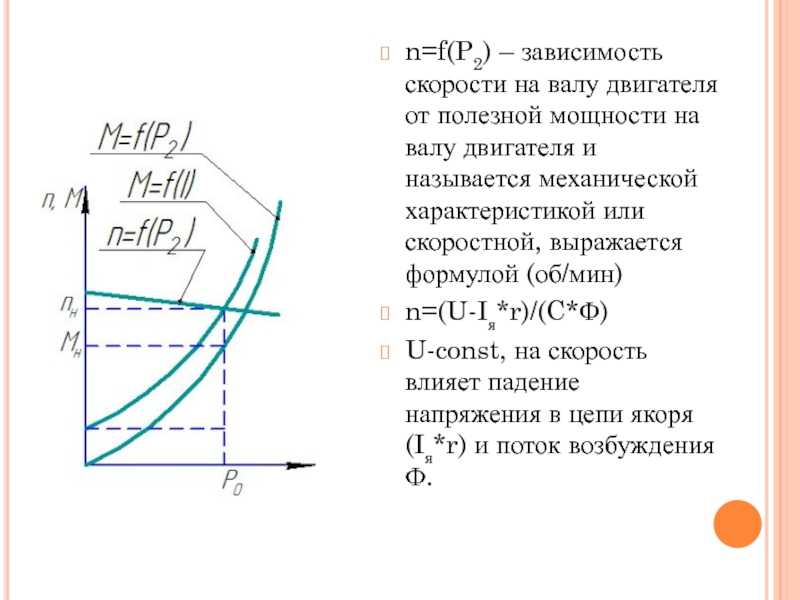
Электромеханические характеристики – это скоростная электромеханическая характеристика зависимости частоты вращения якоря от тока нагрузки n(Iн) и характеристика зависимости вращающего момента от тока нагрузки Мвр(Iн). Электромеханические характеристики снимаются при неизменном подаваемом напряжении.
15.1. Электродвигателя с параллельным возбуждением.
При изменении нагрузки (при изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и не будет изменяться в обмотке возбуждения.
Mвр = См х ф х Iн ; С м = Const, ф = Const т.к. Iв = Const
Вращающийся момент зависит толькоот тока нагрузки и характеристика будет иметь вид прямой линии.
|
Зависимость вращающегося момента от тока нагрузки. |
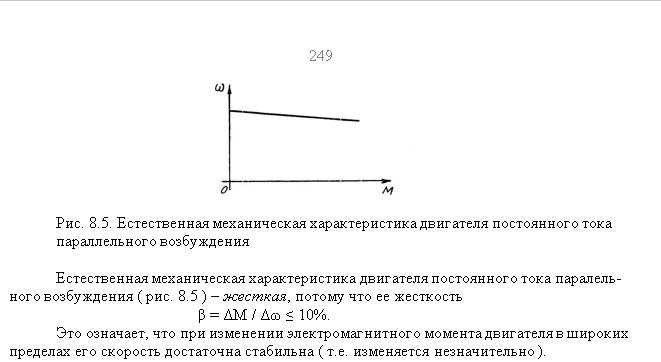
Скоростная электромеханическая характеристика. |
, U =Const, С E = Const, ф = Const
При увеличении нагрузки частота вращения якоря будет уменьшаться только из-за увеличения падения напряжения в обмотке якоря. Но, т.к. сопротивление обмотки якоря мало, то и падение напряжения в обмотке якоря мало и составляет примерно 4 % от номинального напряжения при номинальном токе. Характеристика будет иметь вид прямой линии с малым наклоном и называется жесткой (когда при изменении одной величины в широких пределах другая величина изменяется незначительно).
При уменьшении нагрузки частота вращения якоря увеличивается, противо Э.Д.С. возрастает и при какой-то n величина наводимой в обмотке якоря Э.Д.С. сравнивается с приложенным напряжением.
При дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель автоматически перешел в генераторный режим.
Электромеханические характеристики для двигателя с независимым возбудителем, имеют внешний вид, подобный электромеханическим характеристикам двигателя с параллельным возбуждением из-за Ф = Const.
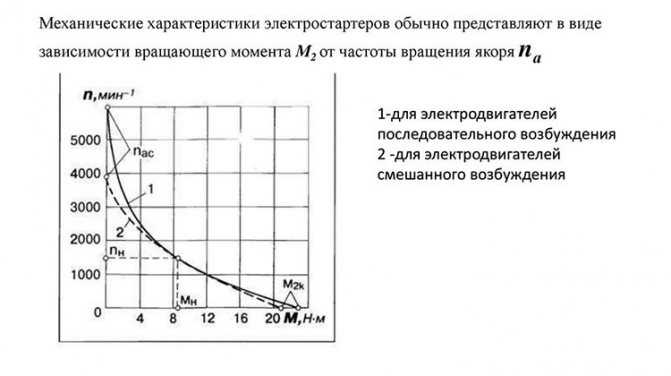
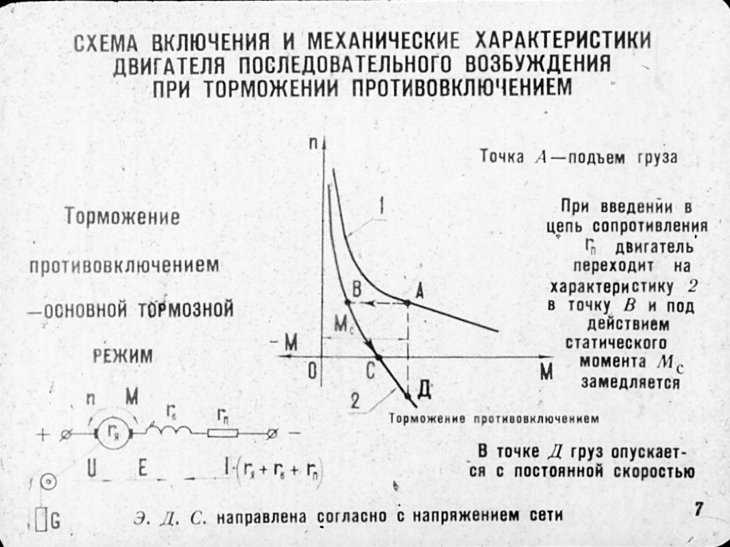
15.2.Электродвигателя с последовательным возбудителем.
Ток нагрузки равен току якоря и току возбуждения. При изменении нагрузки будет изменяться ток в обмотке якоря и одновременно в обмотке возбуждения, а, значит, будет изменяться и магнитный поток в соответствии с кривой намагничивания
|
Кривая намагничивания. |
Mвр = См х Ф х Iн ; Ф = Iн х w / R магн ; Mвр = См х w/Rмагн х I2н,
где w — число витков.
Вращающий момент зависит от тока в квадрате и характеристика будет иметь вид параболы. Так происходит до магнитного насыщения полюсов. При дальнейшем увеличении нагрузки магнитный поток будет оставаться неизменным, вращающий момент будет зависеть только от тока и характеристика переходит в прямую линию.
|
Зависимость вращающегося момента от тока нагрузки. |
Скоростная электромеханическая 7 Теория общественного договора в философии нового времени — лекция, которая пользуется популярностью у тех, кто читал эту лекцию. характеристика. |
При увеличении нагрузки частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в обмотках двигателя и, в большей степени, из-за увеличения магнитного потока, что вызывает резкое понижение частоты вращения якоря. По мере роста тока нагрузки замедляется рост магнитного потока, а затем наступает магнитное насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении нагрузки магнитный поток остается постоянным, частота вращения якоря понижается только из-за увеличения падения напряжения в
обмотках двигателя. Характеристика переходит в прямую линию.
Скоростная электромеханическая характеристика мягкая.
При уменьшении нагрузки частота вращения увеличивается, но уменьшается и магнитный поток. Поэтому, наводимая противо Э.Д.С. в обмотке якоря не может преодолеть приложенное напряжение. Электродвигатели с последовательным возбуждением автоматически не переходят в генераторный режим.
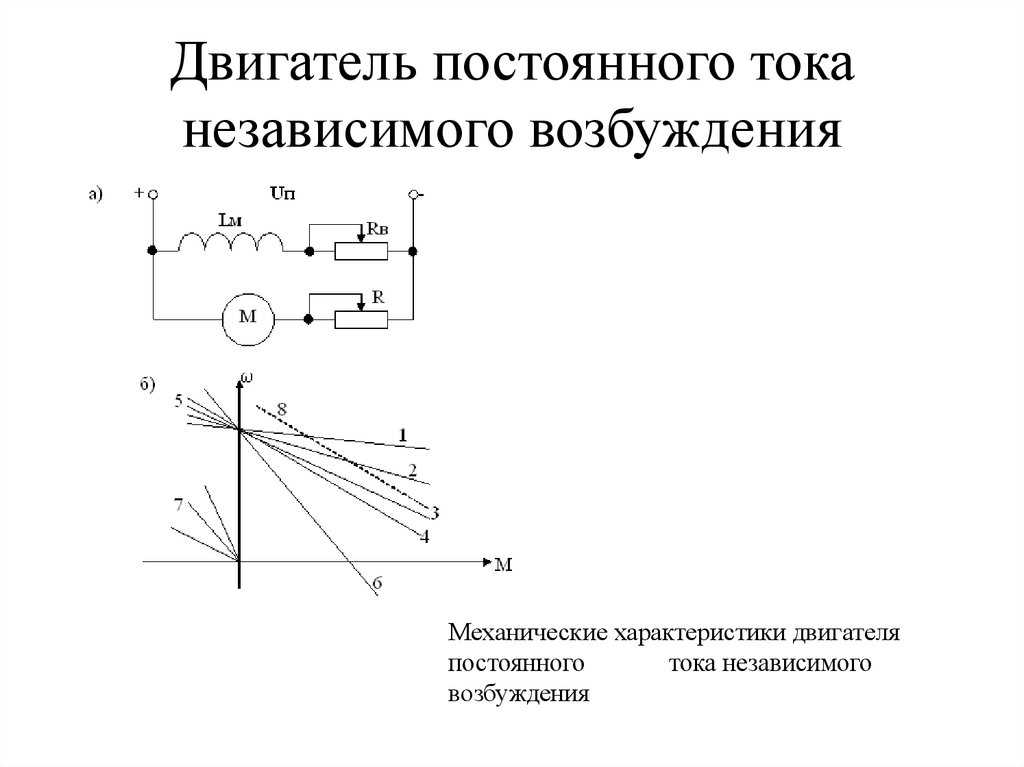
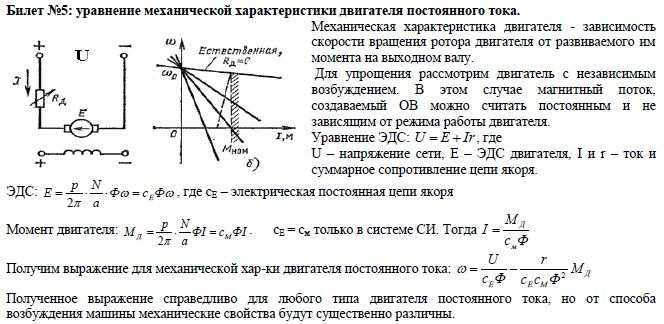
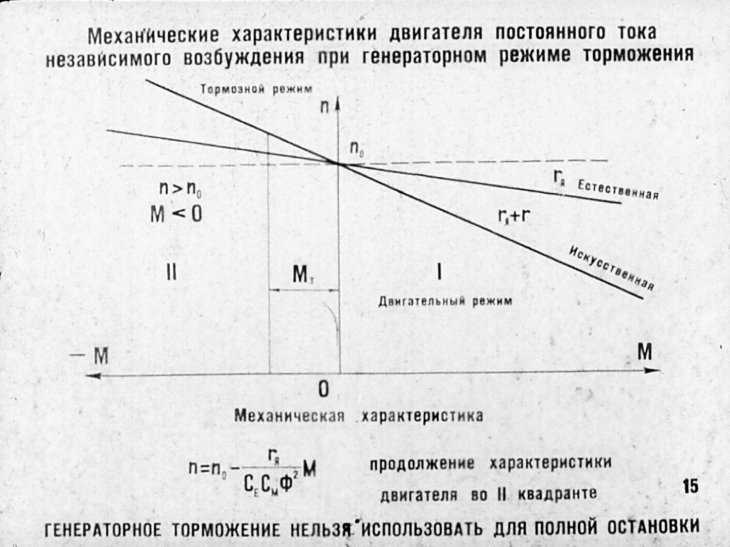

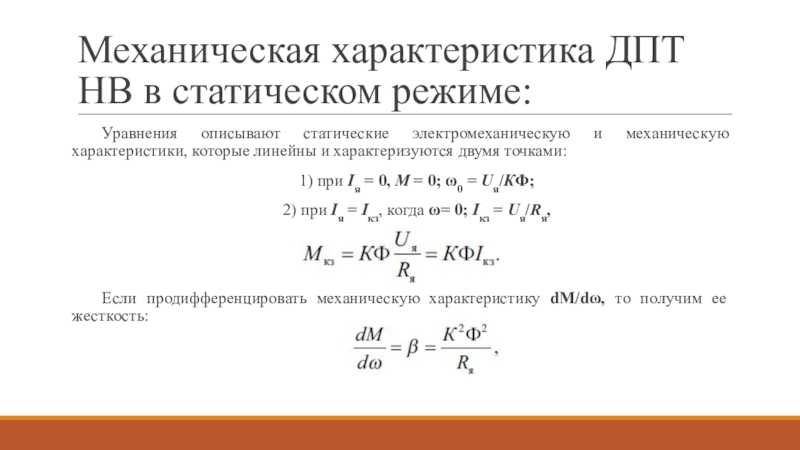
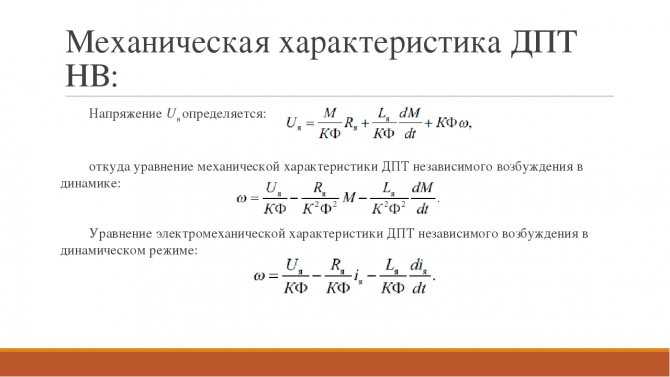
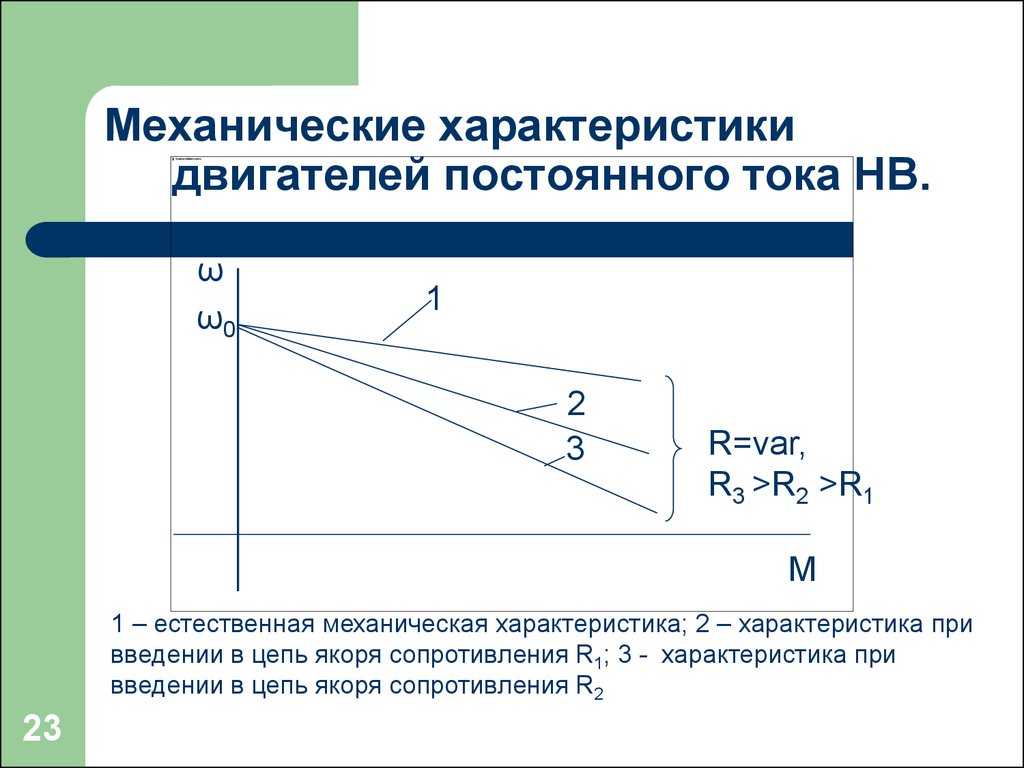
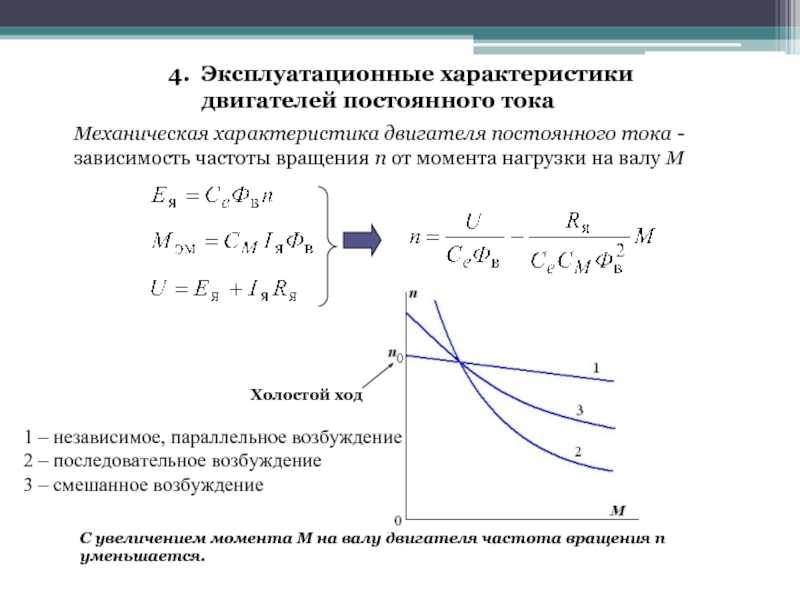
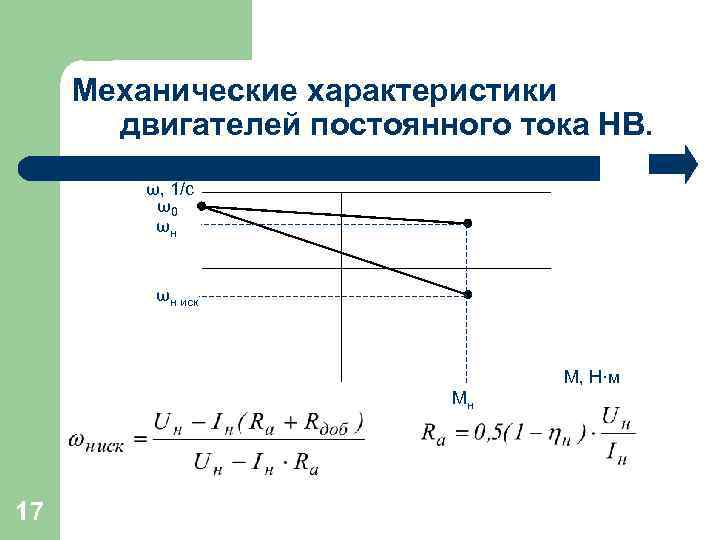
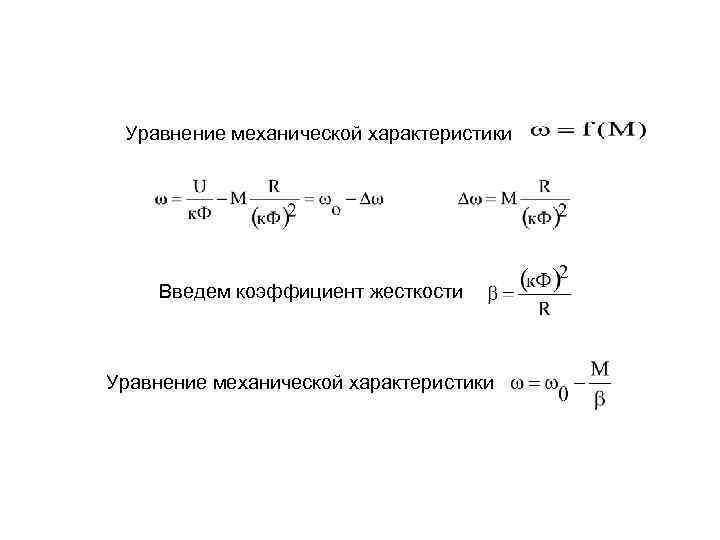
Механическая характеристика двигателя постоянного тока независимого возбуждения (ДПТ НВ)
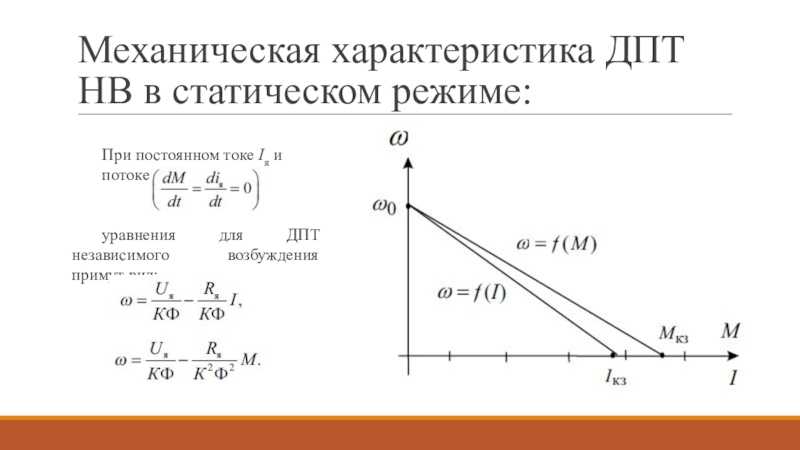
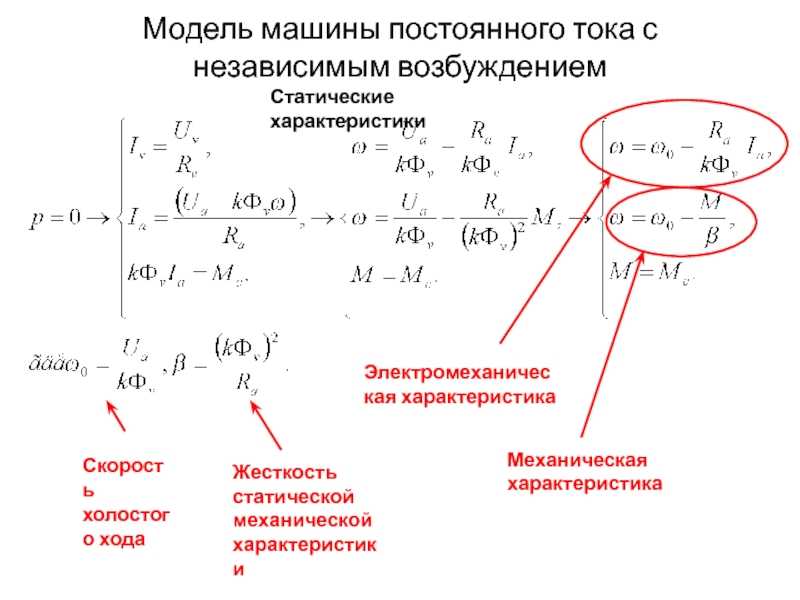
Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид
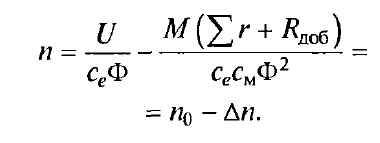
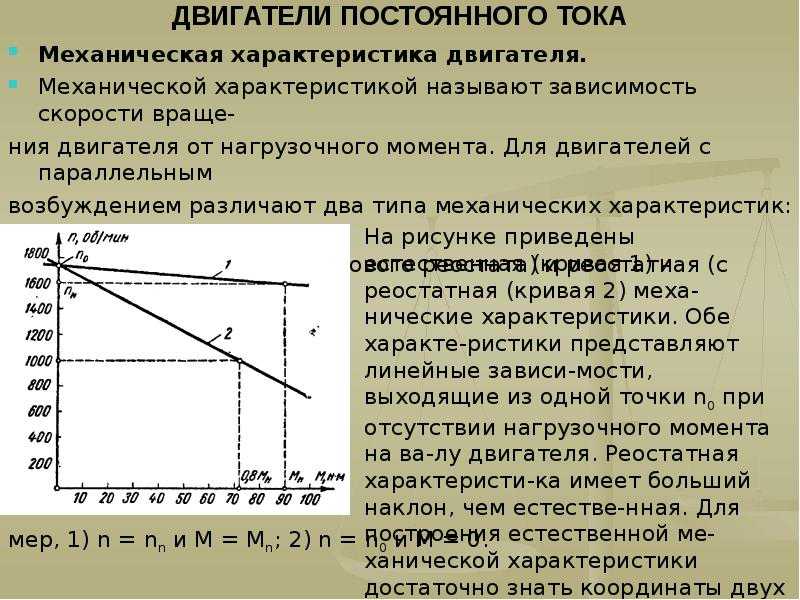
где: n — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки.
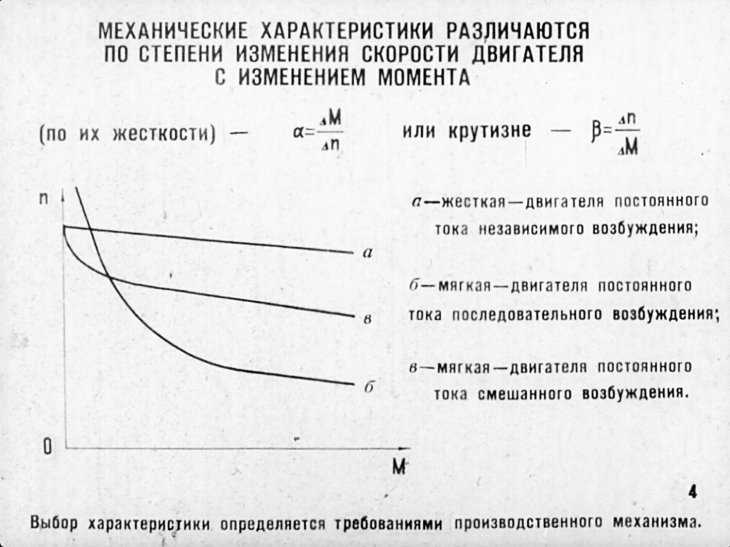
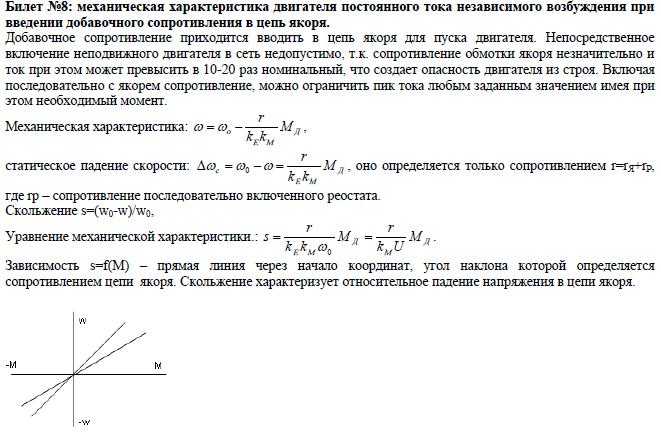
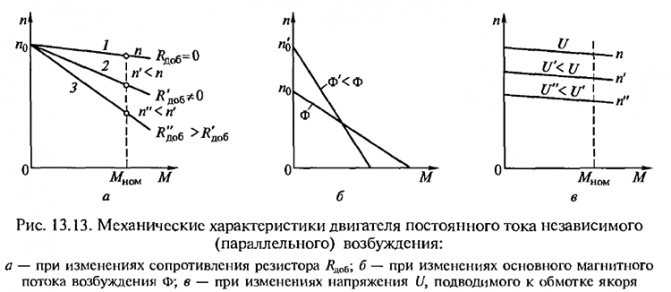
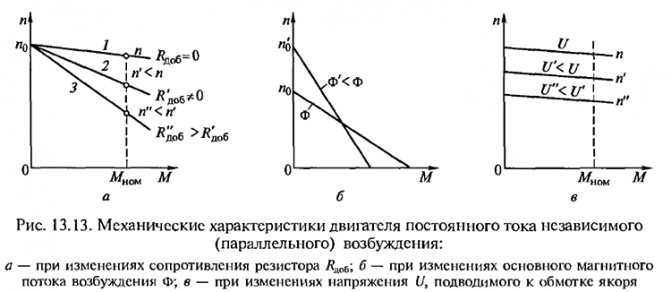
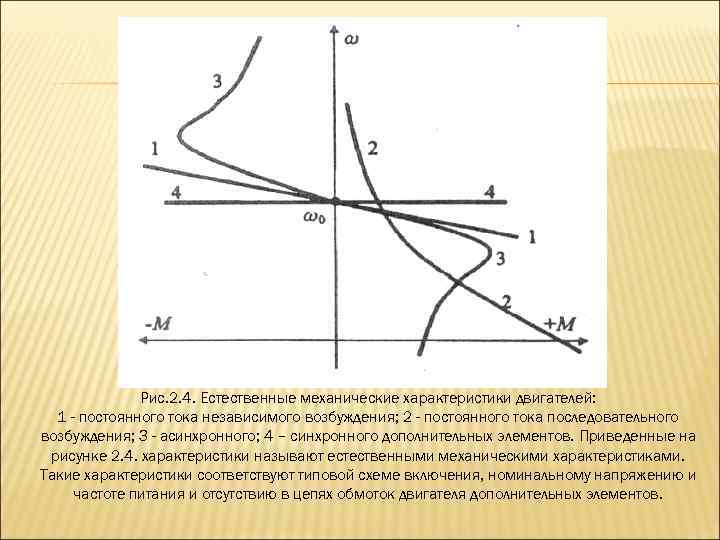
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1).
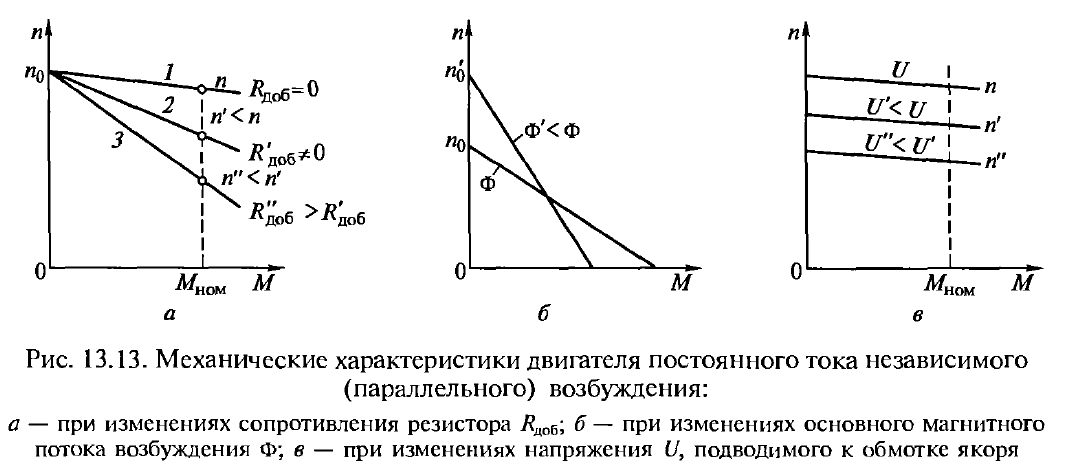
Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными рисунок 13.13, а (график 1 Rдоб = 0 ).
Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными .
Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 2 и 3).
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдобдля получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения:
где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n — частота вращения холостого хода, об/мин.
Частота вращения холостого хода nпредставляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.
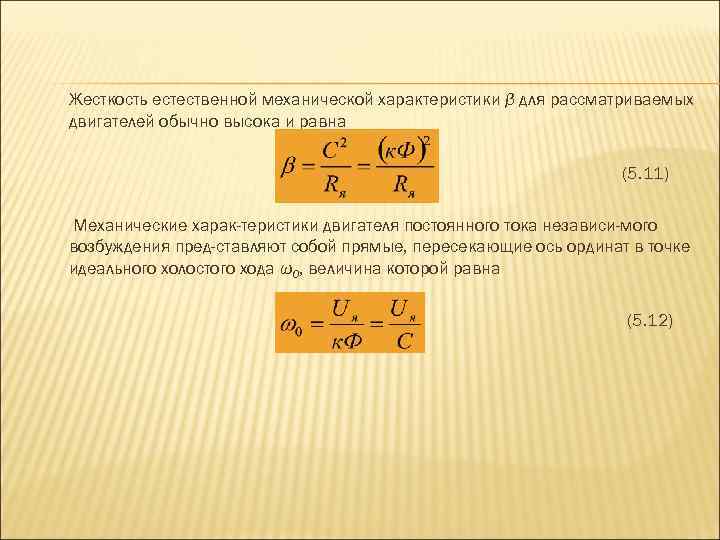
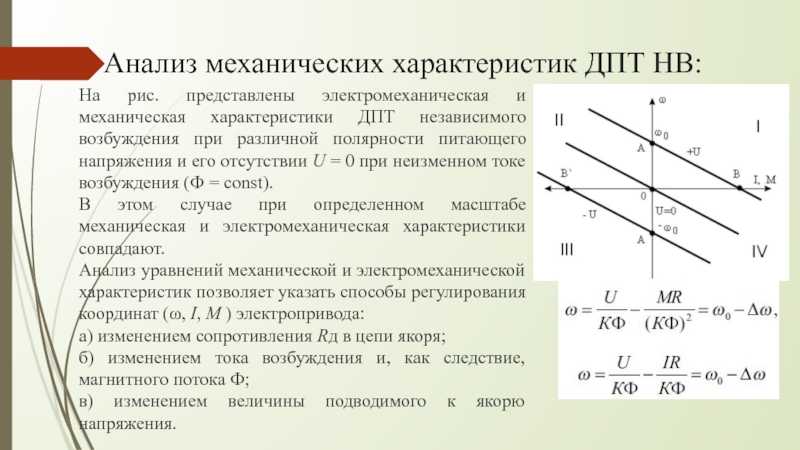
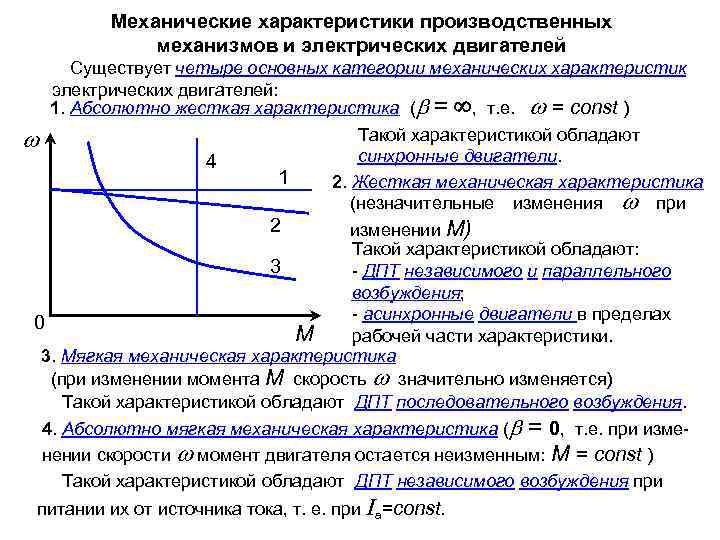
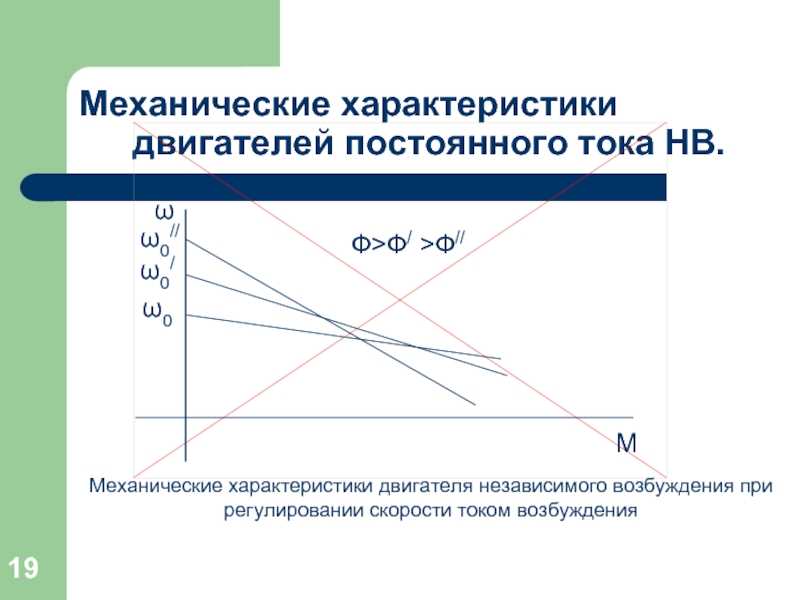
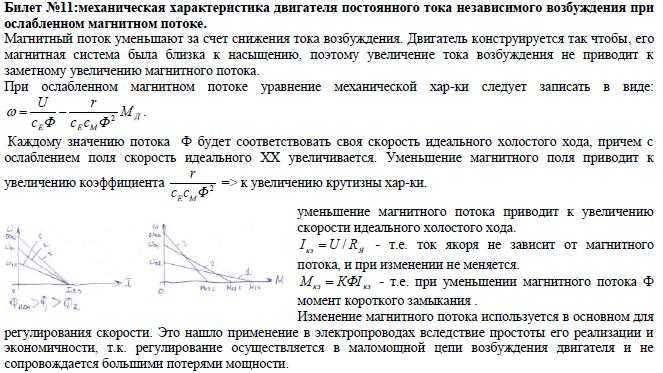
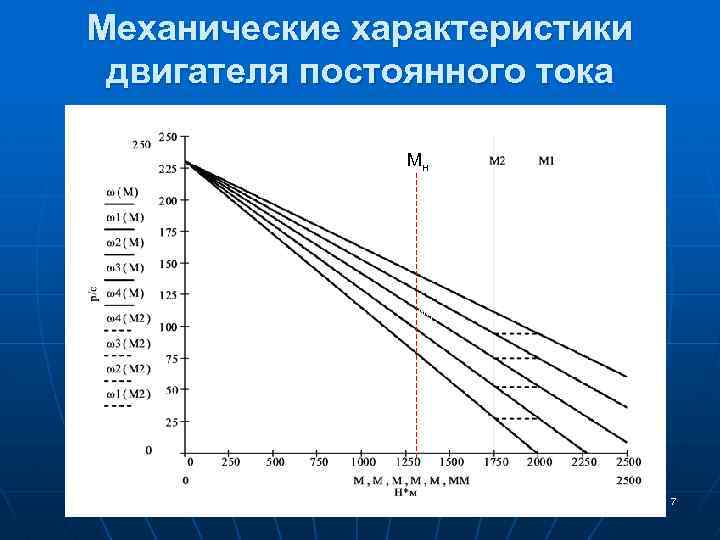
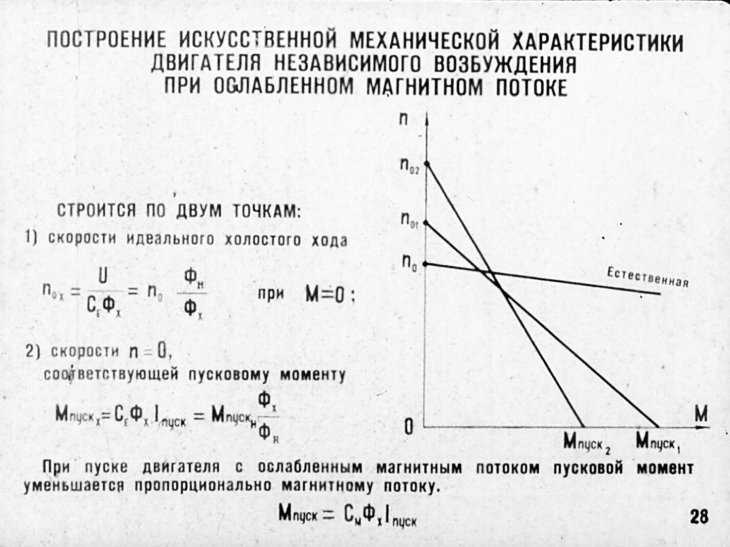
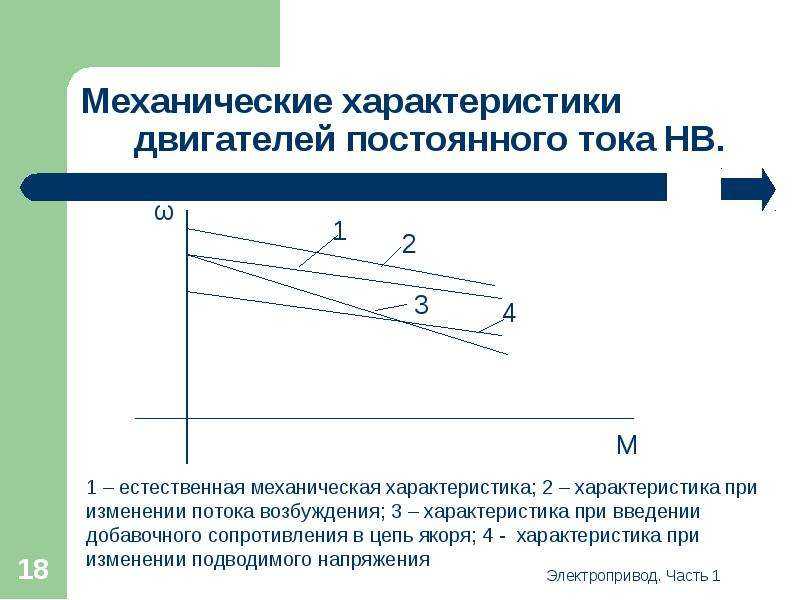
На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n, a Δn остается неизменным . В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
Используемая литература: — Кацман
М.М.Справочникпоэлектрическиммашинам Источник





