
Миф или реальность?
Вечный двигатель знаком практически каждому еще со школьной скамьи, только на уроках физики четко утверждалось, что добиться практической реализации невозможно из-за сил трения в движущихся элементах. Среди современных разработок магнитных моторов представлены самоподдерживающие модели, в которых магнитный поток самостоятельно создает вращательное усилие и продолжает себя поддерживать в течении всего процесса работы. Но основным камнем преткновения является КПД любого двигателя, включая магнитный, так как он никогда не достигает 100%, со временем мотор все равно остановится.
Поэтому все практические модели требуют повторного вмешательстве через определенное время или каких-либо сторонних элементов, работающих от независимого источника питания. Наиболее вероятным вариантом бестопливных двигателей и генераторов выступает магнитная машина. В которой основной движущей силой будет магнитное взаимодействие между постоянными магнитами, электромагнитными полями или ферромагнитными материалами.
Актуальным примером реализации являются декоративные украшения, выполненные в виде постоянно двигающихся шаров, рамочек или других конструкций. Но для их работы необходимо использовать батарейки, которые питают постоянным током электромагниты. Поэтому далее рассмотрим тот принцип действия, который подает самые обнадеживающие ожидания.
Магнитный мотор Говарда Джонсона
Магнитный мотор Говарда Джонсона
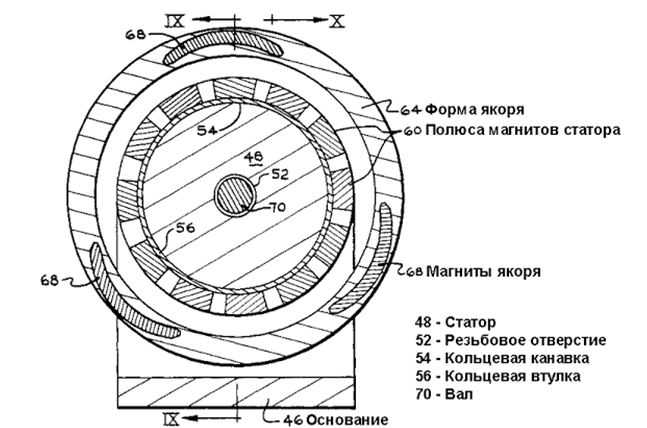
В своей работе и следующем за ней патенте на изобретение, Говард Джонсон использовал энергию, генерируемую потоком непарных электронов, присутствующих в магнитах для организации цепи питания мотора. Статор Джонсона представляет собой совокупность множества магнитов, дорожка расположения и движения которых будет зависеть от конструктивной компоновки агрегата Говарда Джонсона (линейной или роторной). Они закрепляются на специальной пластине с высокой степенью магнитной проницаемости. Одноименные полюса статорных магнитов направляются в сторону ротора. Это обеспечивает поочередное притяжение и отталкивание полюсов, а вместе с ними, момент и физическое смещение элементов статора и ротора относительно друг друга.
Организованный Говардом Джонсоном расчет воздушного зазора между ними позволяет корректировать магнитную концентрацию и силу взаимодействия в большую или меньшую сторону.
Сфера применения
 Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Электродвигатели переменного тока широко используются практически во всех сферах. Ими оснащаются электростанции, их используют в автомобиле- и машиностроении, есть они и в домашней бытовой технике. Простота их конструкции, надежность, долговечность и высокий показатель КПД делает их практически универсальными.
Асинхронные двигатели нашли применение в приводных системах различных станков, машин, центрифуг, вентиляторов, компрессоров, а также бытовых приборов. Трехфазные асинхронные двигатели являются наиболее распространенными и востребованными
Синхронные двигатели используются не только в качестве силовых агрегатов, но и генераторов, а также для привода крупных установок, где важно контролировать скорость
Миф или реальность?
Вечный двигатель знаком практически каждому еще со школьной скамьи, только на уроках физики четко утверждалось, что добиться практической реализации невозможно из-за сил трения в движущихся элементах. Среди современных разработок магнитных моторов представлены самоподдерживающие модели, в которых магнитный поток самостоятельно создает вращательное усилие и продолжает себя поддерживать в течении всего процесса работы. Но основным камнем преткновения является КПД любого двигателя, включая магнитный, так как он никогда не достигает 100%, со временем мотор все равно остановится.
Поэтому все практические модели требуют повторного вмешательстве через определенное время или каких-либо сторонних элементов, работающих от независимого источника питания. Наиболее вероятным вариантом бестопливных двигателей и генераторов выступает магнитная машина. В которой основной движущей силой будет магнитное взаимодействие между постоянными магнитами, электромагнитными полями или ферромагнитными материалами.
Актуальным примером реализации являются декоративные украшения, выполненные в виде постоянно двигающихся шаров, рамочек или других конструкций. Но для их работы необходимо использовать батарейки, которые питают постоянным током электромагниты. Поэтому далее рассмотрим тот принцип действия, который подает самые обнадеживающие ожидания.
Устройство и принцип работы
Сегодня существует достаточно большое количество магнитных двигателей, некоторые из них схожи, другие имеют принципиально отличительную конструкцию.
Для примера мы рассмотрим наиболее наглядный вариант:
Принцип действия магнитного двигателя
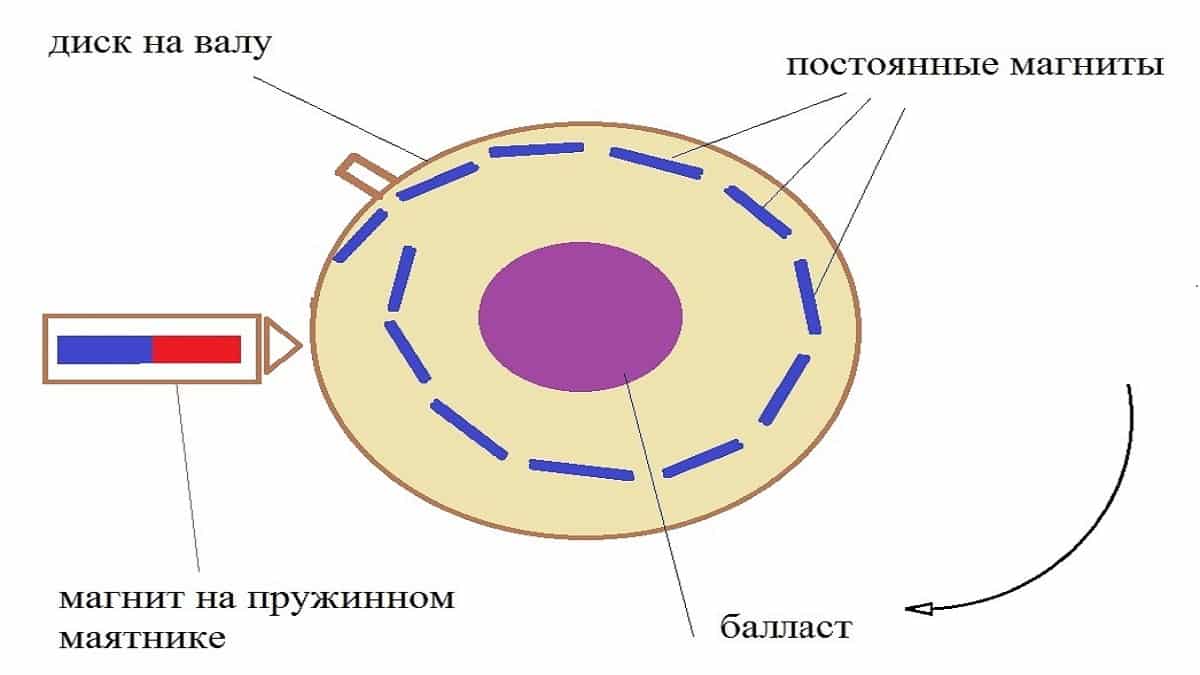
Как видите на рисунке, мотор состоит из следующих компонентов:
- Магнит статора здесь только один и расположен он на пружинном маятнике, но такое размещение требуется только в экспериментальных целях. Если вес ротора окажется достаточным, то инерции движения хватит для преодоления самого малого расстояния между магнитами и статор может иметь стационарный магнит без маятника.
- Ротор дискового типа из немагнитного материала.
- Постоянные магниты, установленные на роторе в форме улитки в одинаковое положение.
- Балласт — любой увесистый предмет, который даст нужную инерционность (в рабочих моделях эту функцию может выполнять нагрузка).
Все, что нужно для работы такого агрегата — это придвинуть магнит статора на достаточное расстояние к ротору в точке самого наибольшего удаления, как показано на рисунке. После этого магниты начнут притягиваться по мере приближения формы улитки по кругу, и начнется вращение ротора. Чем меньше размер магнитов и чем более плавная форма получится, тем легче произойдет движение. В месте максимального сближения на диске установлена «собачка», которая сместит маятник от нормального положения, чтобы магниты не притянулись в статическое положение.
Генератор Перендева
Генератор Перендева
Еще одним неоднозначным примером действия магнитных сил является самовращающийся магнитный двигатель Перендев. Его создатель Майк Брэди, до того, как в его отношении начали уголовное производство, даже успел обзавестись патентом, создать одноименную фирму (Перендев) и поставить дело на поток. Если анализировать представленную в патенте схему и принцип, или чертежи самодельных эл. двигателей, то ротор и статор имеют форму диска и внешнего кольца. На них по кольцевой траектории размещают отдельные магниты, соблюдая определенный угол относительно центральной оси. За счет взаимодействия поля отдельных магнитов статора и ротора Перендев, возникает момент и происходит их взаимное перемещение (вращение). Расчет цепи магнитов сводится к определению угла расхождения.
Теория магнитного двигателя
Новая теория магнитного двигателя заслуживает внимания, возможно кто-то из вас попробует воплотить идею в жизнь.
Всё, что я видел и читал в Интернете связанное с магнитными двигателями, не выдерживает критики. И те действующие системы работают или от первоначального импульса или вообще не действуют. А получать от них максимальную полезную работу и использовать в промышленности или дома не реально. Это лишь доказывает о том, что сконструировать его можно, посмотрим на другой подход к этой задаче.
В обычном электромагните или постоянном магните присутствуют два полюса и не что с этим не сделать. Дело в том, чтобы работал магнитный двигатель нужно избавиться от полюсов или статора или ротора.
Просмотрим некоторые элементы электромагнетизма.
Из школьного курса физики мы знаем, как выглядит поле бесконечно длинного провода (рис 1 а).
Рис 1
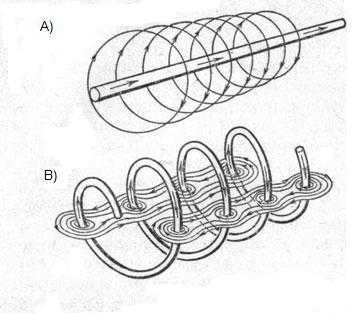
Оно не имеет полюсов, а замкнуто само на себя. Во втором случае намотав катушку, получили конфигурацию поля с полюсами (рис 1 в). По такому принципу и получают постоянные магниты.
Теперь взглянем на поведение провода с током в магнитном поле. Можно сказать поведение магнитного поля провода.
Если внести проводник с током в магнитном поле, то в результате сложения магнитных полей магнита и проводника произойдет усиление результирующего магнитного поля с одной стороны проводника и ослабление магнитного поля с другой стороны проводника. В результате действия двух магнитных полей произойдет искривление магнитных линий, и они, стремясь сократиться, будут выталкивать проводник. То есть магнитное поле проводника. (рис 2)
Из курса физики этот эффект называется электромагнитной силой.
Рис 2
Пробуем создать эффект электромагнитной силы без проводника. Для этого нам требуется создать магнит без полюсов, я думаю понятно почему. А какой магнит больше всего подходит? Только один — тороидальный. Для сборки понадобится обычный магнит но с полюсами срезанными под 45 градусов. (рис 3 а)
Рис 3
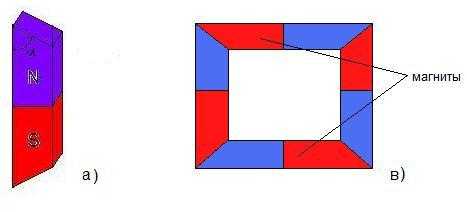
Собираем конструкцию из четырех постоянных магнитов (Рис 3 в). И получилась система с замкнутыми силовыми линиями внутри магнита. Вот мы и получили тор в прямоугольном исполнении.
Теперь создаем «тору» условия для эффекта электромагнитной силы (рис 4)
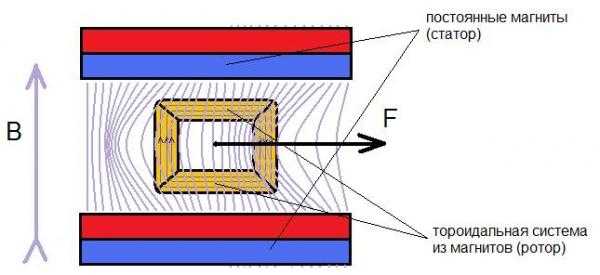
Как видно магнитное поле «тороидальной системы» направлено по часовой стрелке, а внешнее поле от северного полюса к южному, поэтому происходит эффект смещения, что порождает силу F.
Если собирать такой двигатель, то для статора лучше подойдет кольцевой магнит с аксиальным вектором намагниченности. Все привожу без формул, они здесь лишние.
Работа машины постоянного тока в режиме генератора
§ 110. РАБОТА МАШИНЫ ПОСТОЯННОГО ТОКА В РЕЖИМЕ ГЕНЕРАТОРА Якорь генератора приводится во вращение каким-либо двигателем, развивающим вращающий момент М1. При перемещении проводников обмотки якоря в магнитном поле полюсов в них индуктируется э.д.с, направление которой определяется правилом правой руки (рис. 142). Если якорь вращается с числом оборотов в минуту п, то в его обмотке индуктируется э. д. с.
Если обмотку якоря через щетки замкнуть на какой-либо приемник энергии г (сопротивление нагрузки), то через этот приемник и обмотку якоря будет протекать ток Iя, который в обмотке якоря имеет направление, совпадающее с направлением э.д.с. В результате взаимодействия этого тока с магнитным полем полюсов создается электромагнитный момент Мэ, направление которого определяется правилом левой руки.
Таким образом, развиваемый машиной электромагнитный момент является тормозным, направленным встречно направлении вращения якоря машины, так что для вращения последнего первичный двигатель должен развивать вращающий момент М1 достаточный для преодоления электромагнитного тормозного момента,
следовательно, машина потребляет механическую энергию.
В случае равновесия моментов, т. е. М1== Мэ, якорь машины вращается с неизменно скоростью. При нарушении равновесия моментов число оборотов якоря начнет изменяться. Если почему-либо момент первичного двигателя уменьшится, т. е. станет меньше электромагнитного момента генератора (М1 Мэ) число оборотов якоря, а также э. д. с. и ток в его обмотке будут увеличиваться, что вызывает увеличение тормозного электромагнитного момента.
При нарушении равновесия моментов число оборотов якоря, э.д.с. и ток в его обмотке претерпевают изменения до восстановления равновесия моментов, т. е. пока электромагнитный момент генератора не станет равным вращающему моменту первичного двигателя.
Таким образом, любое изменение момента первичного двигателя, т. е. потребляемой генератором мощности, вызывает соответствующее изменение как электромагнитного момента генератора, так и вырабатываемой им мощности. Так же при изменениях нагрузки генератора потребуется соответствующее изменение момента первичного двигателя для поддержания постоянства числа оборотов якоря генератора.
Ток обмотки якоря Iя, протекающий при нагрузке генератора, встречает на своем пути сопротивление внешней нагрузки rн, сопротивление обмотки якоря rоб и сопротивление переходных контактов между щетками и коллектором rщ. Обозначив через rя внутреннее сопротивление машины, представляющее собой сумму сопротивлений обмотки якоря и щеточных контактов (rоб+rщ), для тока в якоре можем записать следующее выражение:
Сопротивление rщ непостоянно и зависит от большого числа факторов, как-то: величины и направления тока, состояния коллектора, силы нажатия щеток на коллектор, скорости вращения, радение напряжения в щеточных контактах остается примерно нанесенным при изменениях нагрузки (принимается равным 2 в на пару угольных и графитных щеток).
Поэтому внутреннее сопротивление машины rя также не являйся величиной постоянной при изменении нагрузки генератора.
Так как Iяrн=U, где (U— напряжение на зажимах генератора при нагрузке, то получим следующее уравнение равновесия э.д.с. лля генератора:
Из уравнения равновесия э.д.с. легко получить уравнение мощностей, т. е.
где Р2 — полезная мощность генератора, отдаваемая потребителю электрической энергии,
Рэ— внутренняя или электромагнитная мощность генератора, преобразованная им в электрическую,
Роб —потери мощности в обмотке якоря и щеточных контактах.
При холостом ходе генератора электромагнитная мощность равна нулю (Рэ=0), но для вращения якоря машины первичный двигатель должен затратить некоторую мощность Р, расходуемую на покрытие потерь холостого хода. Мощность Р складывается из потерь механических на трение в подшипниках и трение о воздух вращающихся частей машины Рмех и из потерь в стали на
гистерезис и вихревые токи Pст.В генераторах с самовозбуждением мощность Р включает также мощность, затраченную на создание магнитного потока, т. е. на возбуждение машины.
При нагрузке генератора первичный двигатель затрачивает мощность Р1 = Рэ + Ро.
Электромагнитный момент машины
где
— угловая скорость якоря.
то электромагнитный момент машины определится следующим выражением:
Величины а, р
иN постоянны для данной машины, поэтому выражение представляет собой некоторый постоянный для данной машины коэффициент и электромагнитный момент равен:
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Основные параметры электродвигателя
Момент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.
,
- где M – вращающий момент, Нм,
- F – сила, Н,
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле
,
- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)1 lb∙in = 0,112985 Nm (Нм)
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Мощность электродвигателя постоянного тока
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.
,
- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы .
,
где s – расстояние, м
Для вращательного движения
,
где – угол, рад,
,
где – углавая скорость, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя
Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.
,
- где – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (), Вт
- При этом
потери в электродвигатели обусловлены:
электрическими потерями — в виде тепла в результате нагрева проводников с током;
магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.
где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси
,
- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением
,
где – угловое ускорение, с-2
,
Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики .
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.
,
где – постоянная времени, с
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Миф или реальность?
Вечный двигатель знаком практически каждому еще со школьной скамьи, только на уроках физики четко утверждалось, что добиться практической реализации невозможно из-за сил трения в движущихся элементах. Среди современных разработок магнитных моторов представлены самоподдерживающие модели, в которых магнитный поток самостоятельно создает вращательное усилие и продолжает себя поддерживать в течении всего процесса работы. Но основным камнем преткновения является КПД любого двигателя, включая магнитный, так как он никогда не достигает 100%, со временем мотор все равно остановится.
Поэтому все практические модели требуют повторного вмешательстве через определенное время или каких-либо сторонних элементов, работающих от независимого источника питания. Наиболее вероятным вариантом бестопливных двигателей и генераторов выступает магнитная машина. В которой основной движущей силой будет магнитное взаимодействие между постоянными магнитами, электромагнитными полями или ферромагнитными материалами.
Актуальным примером реализации являются декоративные украшения, выполненные в виде постоянно двигающихся шаров, рамочек или других конструкций. Но для их работы необходимо использовать батарейки, которые питают постоянным током электромагниты. Поэтому далее рассмотрим тот принцип действия, который подает самые обнадеживающие ожидания.
Ротор асинхронного двигателя
Давайте более подробно рассмотрим, из чего же состоит ротор асинхронного двигателя.
Самая главная часть — это вал. Иначе, как бы происходило вращение?
На вал ротора с двух сторон надеваются подшипники, которые крепятся к передней и задней крышкам и центруют ротор ровно посередине статора.
Далее идет сердечник, набранный из листов специальной электротехнической стали, которые изолированы друг от друга. Кстати, сетевые трансформаторы собираются из такой же стали.
Как вы можете далее заметить, в сердечнике ротора есть специальные пазы
В них вставляются медные или алюминиевые стержни,
которые замыкаются на кольцо с обеих сторон, образуя так называемую «беличью клетку».
В общем виде полностью собранный ротор асинхронного двигателя выглядит вот так.
А вот так он выглядит в реальном двигателе.
Всегда помните, что в асинхронном двигателе вращается ротор, а не статор. Статор — это неподвижная часть, а ротор — подвижная часть электродвигателя. В рабочем состоянии двигателя между ротором и статором всегда имеется воздушный зазор. При работе двигателя ротор ни в коем случае не должен задевать статор двигателя.
Конструктивные особенности
Из каких элементов состоит магнитный двигатель:
- Статор , выполненный как один постоянный магнит на пружинной основе.
- Ротор . Диск, обязательно выполненный из материала, который не подвержен намагничиванию. По поверхности диски расположены небольшие постоянные магниты определённых размеров. Все магниты на диске необходимо разместить в определённой форме и последовательности.
- Балласт . В магнитном двигателе это отдельный элемент, он обеспечивает разгон ротора и его постоянное вращение при работе.
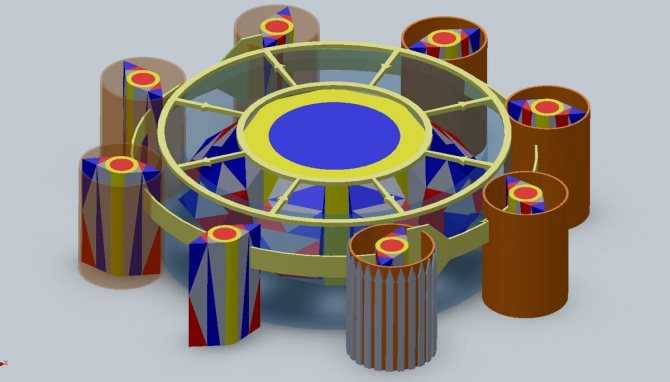
Рисунок 2: Магнитный двигатель (компьютерная модель)
Это пример самой простой конструкции магнитного двигателя. Мастера вроде Николы Тесла
илиВасилия Шкондина создавали куда более изощрённые модели, а многие из конструкторов в данной сфере электротехники даже получили патенты на свои изделия.