
Выбираем автоматический выключатель и пусковое устройство.
Прежде чем заняться подключением двигателя, давайте подберем пускорегулирующую аппаратуру. Современная промышленность выпускает огромное количество автоматов для защиты электродвигателя. Купив такой прибор, можно сразу отбросить вопросы по дальнейшему выбору.
Это интересно — «Способы крепления светильников».
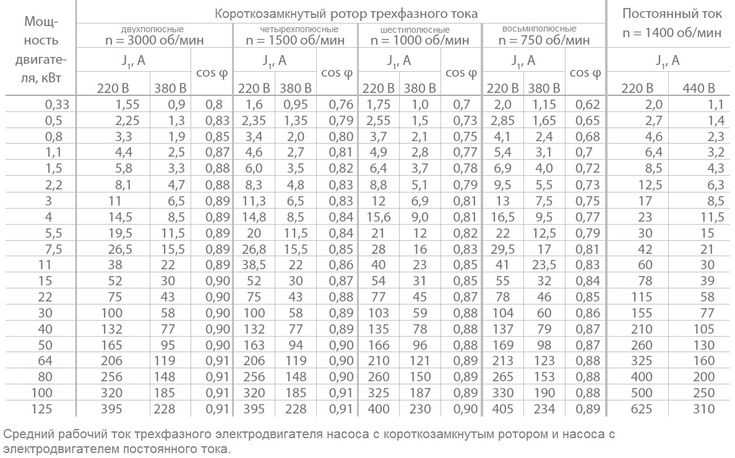
Единственное, что придется сделать — рассчитать аппарат по номинальному току. Вычисляется по формуле: для трехфазной сети — I = Р/ Un*1 .73*n*cosф, и для однофазной — I = Р/ Un*cosф, где Р – мощность электромотора, Un – рабочее напряжение, n – его КПД (как правило, есть в паспорте на изделие, обычно 0,85), а cosф – коэффициент мощности (можно найти в паспорте, для электромоторов, обычно, он равен 0,85). Далее получив результат, умножаем его на температурный коэффициент (это примерно 1,2). Из этого следует, что если, к примеру, мы имеем двигатель 1кВт – то его номинальный ток получится 2,1А для 380в и 6,3А для 220в. Подбираем автоматические выключатели (АВ) с ближайшими параметрами на увеличение. Хорошо зарекомендовали себя автоматы защиты двигателя с встроенным тепловым реле производства Moeller, ABB, Schneider Electric. Но есть одно «НО», они достаточно дорогие.
Поэтому, исходя из финансовых вопросов, берем обычный модульный АВ с характеристикой «С». Однако, к нему еще необходимо тепловое реле (теплушка). Самым оптимальным вариантом будет выбор ПМЛ-1220. И наконец, давайте сами соберем это устройство, тем более, что в нем нет ничего сложного. Нам понадобится: кроме АВ, модульный или просто контактор с 4 нормально-разомкнутыми контактами. Теплушка и две кнопки без фиксации (по одной с нормально-разомкнутыми нормально-замкнутым контактами). Дальше делаем как представлено ниже.
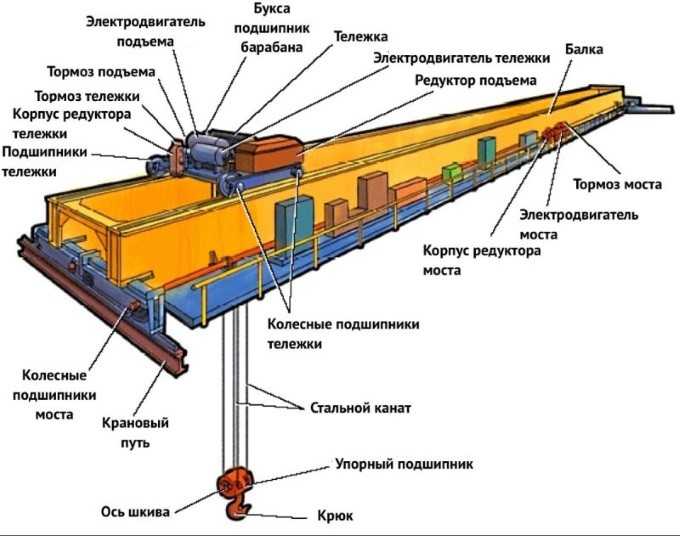
Общее устройство мостового крана
В состав конструкции мостового крана входят следующие основные узлы.
- Поперечные и продольные стальные балки, соединённые сваркой в жёсткую конструкцию. Для массивных моделей мостового кранового оборудования данный узел может быть выполнен в виде мощных решётчатых ферм в комплекте со сплошной балкой.
- Мост крана с ходовыми колёсами. Он представляет собой металлическую конструкцию, предназначенную для того, чтобы по ней перемещалась тележка, поднимающая и опускающая грузы. Чаще всего материалом её изготовления является сталь 3.
- Грузовая тележка с ведущими и ведомыми колёсными группами на раме. В её комплектацию входит электромотор, каретка, канатный барабан, редуктор, тормоз (у моделей, которые работают в условиях производства повышенной опасности, комплектацию может быть предусмотрен основной и дополнительный стопорный механизм), ограничитель высоты подъёма груза.
- Крановые пути – рельсы из стали, по которым перемещается мост, двутавровые балки или направляющие.
- Механизм подъема с электродвигателем. В качестве передаточного устройства используется редуктор с зубчатой передачей открытого исполнения в жёстком соединении с барабаном. При превышении веса перемещаемых грузов отметки 80 т имеются определённые конструктивные особенности: мостовой кран комплектуется дополнительно понижающей передачей или редуктором.
- Механизм передвижения. В комплектацию могут быть включены цилиндрические, конические колёса. Привод для них может быть общим или раздельным.
- Тормозная дискоколодочная или колодочная система (устанавливается в случае, когда скорость перемещения тележки превышает 32 м/минуту).
- Кабина машиниста. Чаще всего она располагается ниже уровня моста.
- Настилы, ограждения, лестницы.
Мостовые краны комплектуются электрооборудованием, в перечень которого входит комплекс из 3 или 4 трёхфазных асинхронных моторов, толкателей, электромагнитов, ограничителей грузоподъёмности. В составе системы управления предусмотрены магнитные пускатели, контроллеры, реле управления. Также конструкцией предусматривается установка осветительных приборов, системы звуковой сигнализации, измерительных приборов. Для электропитания могут использоваться кабели или троллейные шины.
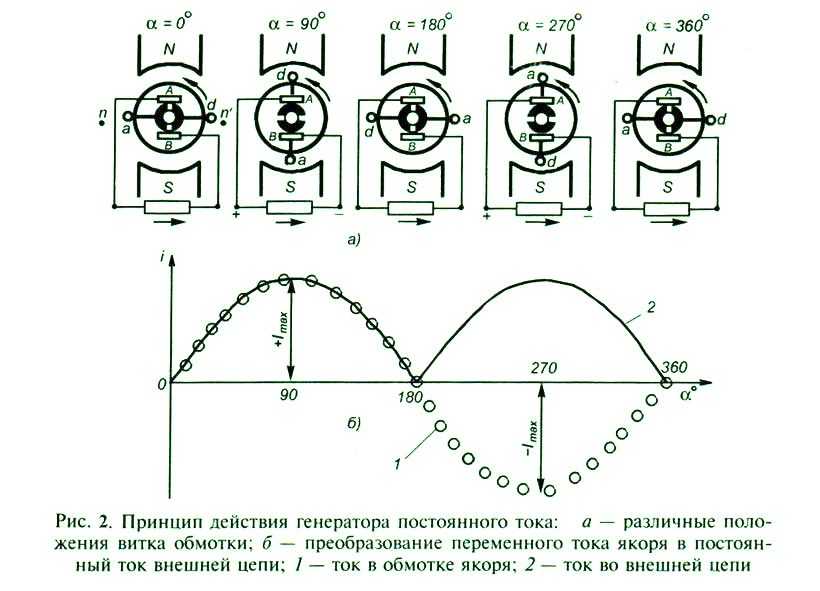
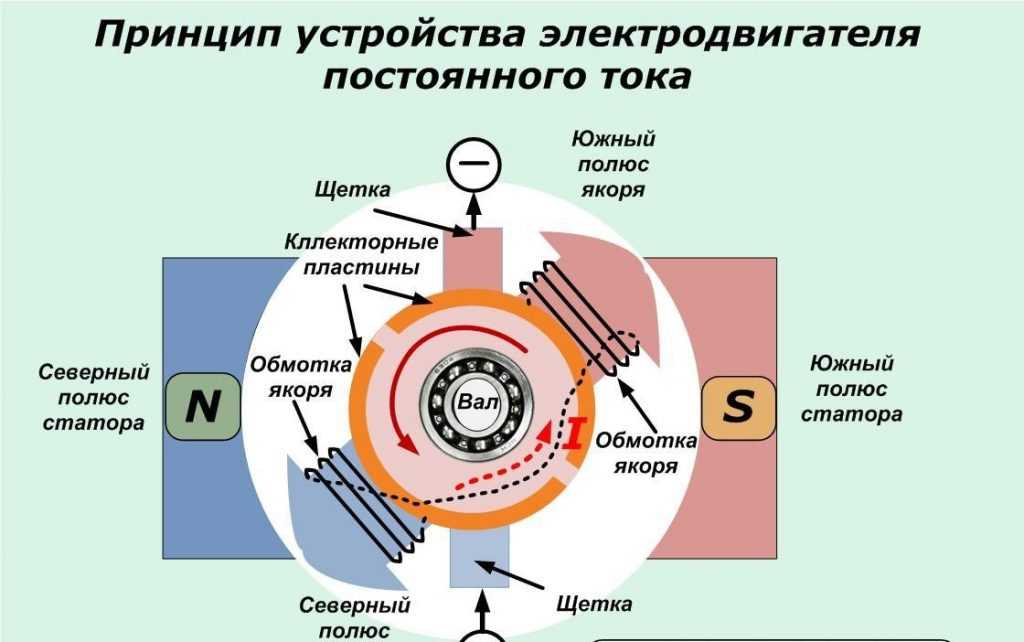
Физический принцип работы электродвигателя постоянного тока
Если мы вспомним закон Ампера, то будет понятно, что на проводник с током в магнитном поле действует некоторая сила. Именно это обстоятельство позволяет получить вращающийся якорь.
Вспомним самый простой опыт, который показывают школьникам. Рамку с током помещают в магнитное поле и она начинает двигаться. Правда двигается она недолго, а скорее дергается. Всему виной несовпадение векторов. Размести мы магниты слегка иначе и получили бы постоянное движение.
Силы Ампера, действующие на боковые стороны рамки, будут создавать вращающий момент, величина которого пропорциональна магнитной индукции, силе тока в рамке, ее площади S и зависит от угла a между вектором магнитной индукции и нормалью к рамке.
Рамка с током в магнитном поле
В представленной ситуации рамка будет вращаться только тогда, когда вектора Fа будут не деформировать её, а придавать вращательное движение.
Вот так крутится рамка
Для этого в данном примере рамку нужно повернуть на 90 градусов. Теперь представим, что якорь нашего двигателя весь состоит из таких рамок, их очень много. Это улучшит процесс движения.
Вот и получился самый простой электрический двигатель постоянного тока.
Теперь представим, как будет выглядеть поведение такого двигателя при включении в цепь с переменным током. Он начнет танцевать в разные стороны. Ведь переменный электрический ток отличается тем, что регулярно меняет своё направление. Рамка с током, через которую он проходит, будет также менять направление своего движения. Крутиться равномерно такая штука не сможет. Поэтому, в переменных сетях используется двигатели переменного тока. Двигатель постоянного тока конечно же сможет работать в переменной сети, но для этого нужно использовать выпрямитель перед ним.
Правда бывают и универсальные электродвигатели, которые одинаково комфортно юзаются и там, и там. Но про это чуть позже.
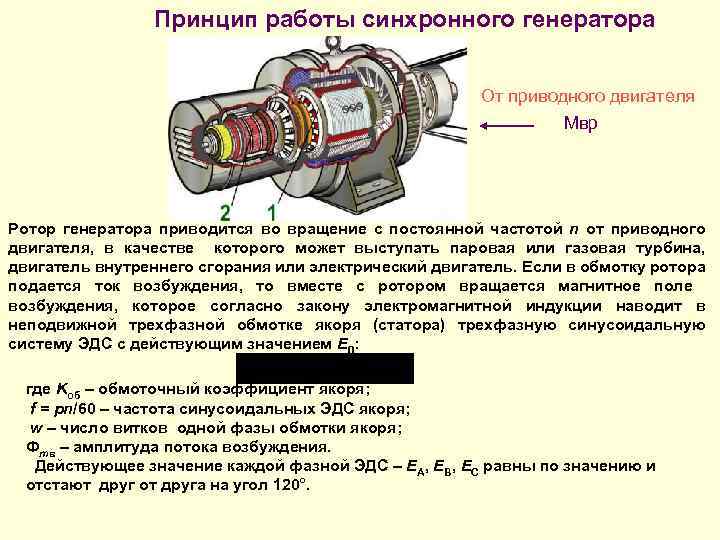
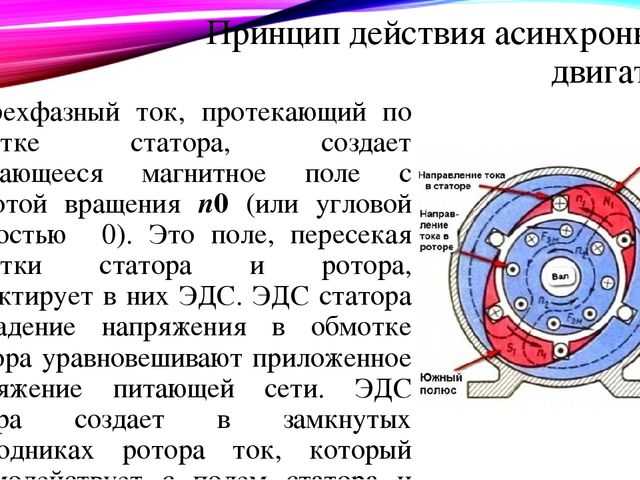
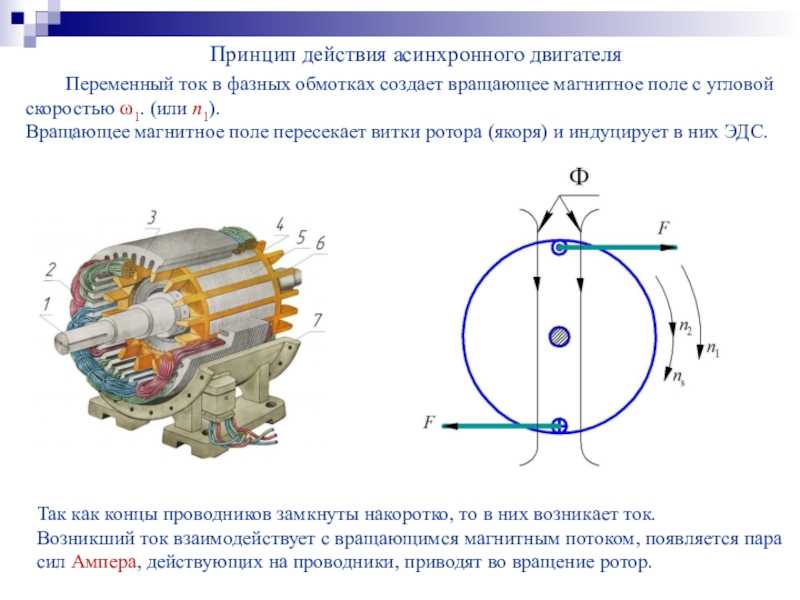
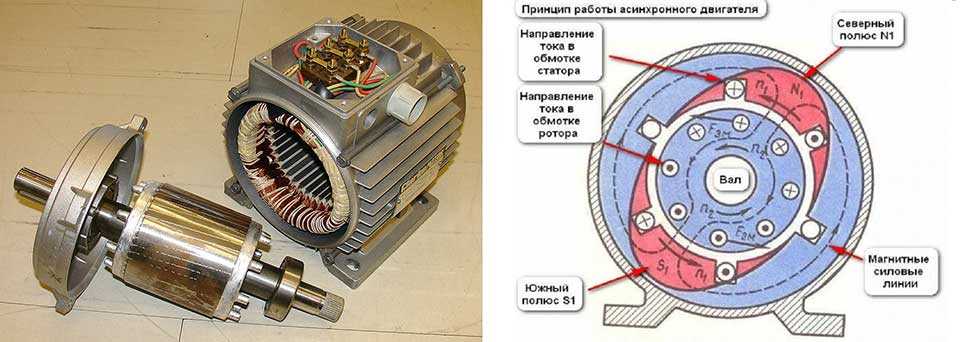
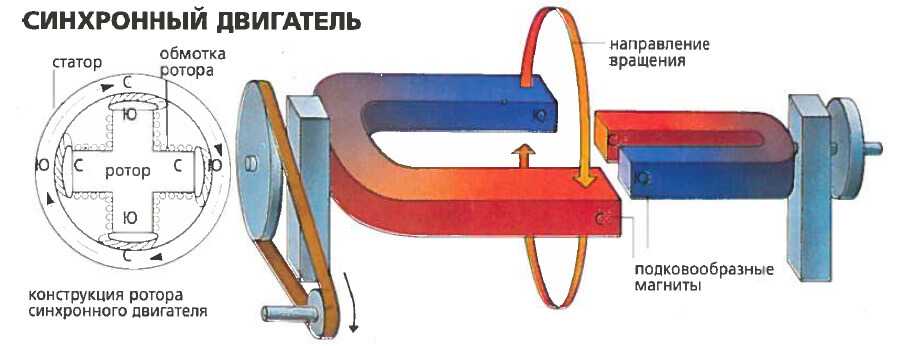
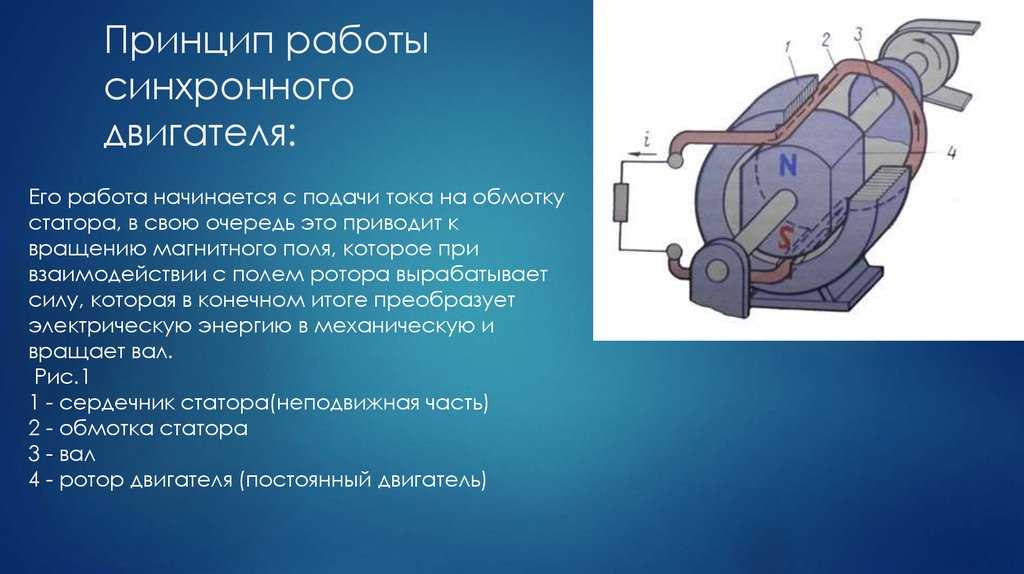
Принцип работы
Располагая обмотки и напряжение в 220 Вольт, двигатель создаёт вращающееся магнитное поле. Выступая движущей силой, оно разгоняет ротор, который, в свою очередь, превращает электрическую энергию в механическую и вращает механизм.
Двухфазный отличается от остальных соответствующими обмотками
Важно, чтобы обе фазы были расположения под прямым углом друг относительно друга. Таким образом удаётся создать устойчивое вращающееся магнитное поле при помощи идущих токов по принципу, аналогичному трёхфазному варианту
В движение двигатель приходит благодаря постоянным токам, которые появляются в момент взаимодействия результирующего поля с роторными стержнями. Это сочетание позволяет быстро достичь предельной скорости вращения, что обеспечивает эффективность и скорость работы. Однако стоит учитывать, что такой двигатель питается только при наличии сдвига по фазе для одной из обмоток. Поэтому частью двухфазной машины неизменно выступают соответствующие конденсаторы.


Сегодня двухфазные двигатели пережили ряд усовершенствований и модернизаций. Самой популярной модификацией являются моторы с полым алюминиевым ротором. Используя вихревые токи в цилиндрах, он быстро разгоняется до предельных скоростей, обеспечивая высокий КПД.
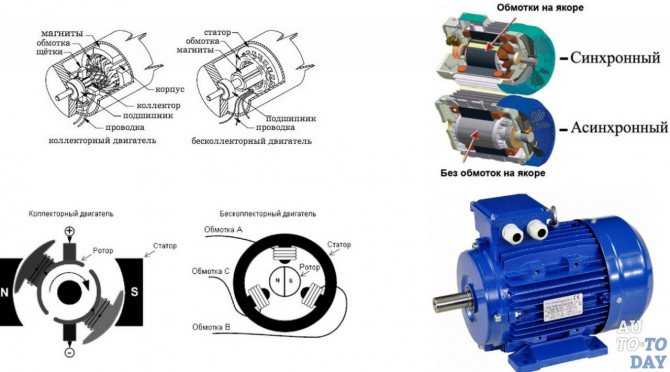
Вторичные виды и типы двигателей
Электродвигатель
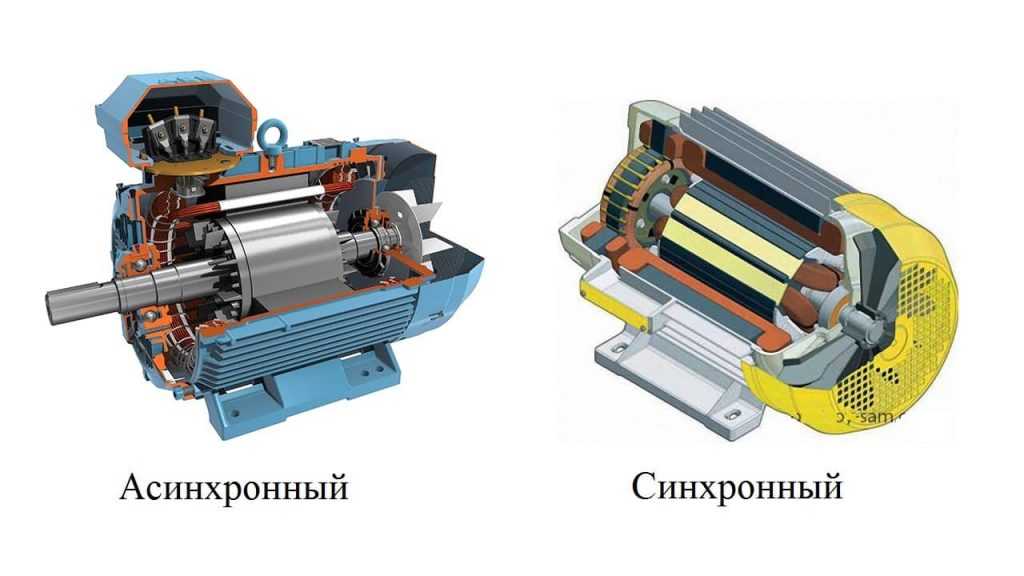
Современный и всем нам известный тип двигателя – электродвигатель. В основе его действия лежит принцип электромагнитной индукции. Состоит из неподвижного статора и вращающегося ротора. Наиболее используемыми являются электродвигатели магнитоэлектрические. Они в свою очередь разделяются на моторы постоянного и переменного тока. Однако, встречаются и универсальные, способные действовать от обоих видов тока.
Первые разделяются на коллекторные и бесколлекторные (вентильные) двигатели. Вторые на синхронные и асинхронные.
Сегодня электромотор, изобретенный английским физиком Майклом Фарадеем в 1821г. используется во всех сферах деятельности человека. Кстати, 1-й пригодный для использования электрический двигатель, изобрел и построил в 1834г. Российский ученый Борис Семенович Якоби.
Пневмодвигатели и гидродвигатели
Работают на заранее запасенной под высоким давлением в баллонах газах и жидкостей. Используются в местах, где применение ДВС и электромоторов невозможно. Например, в шахтах, из-за скопления взрывоопасных газов. Также пневмодвигатели и гидродвигатели широко используются на различных производствах в качестве инструмента и исполнительных механизмов.
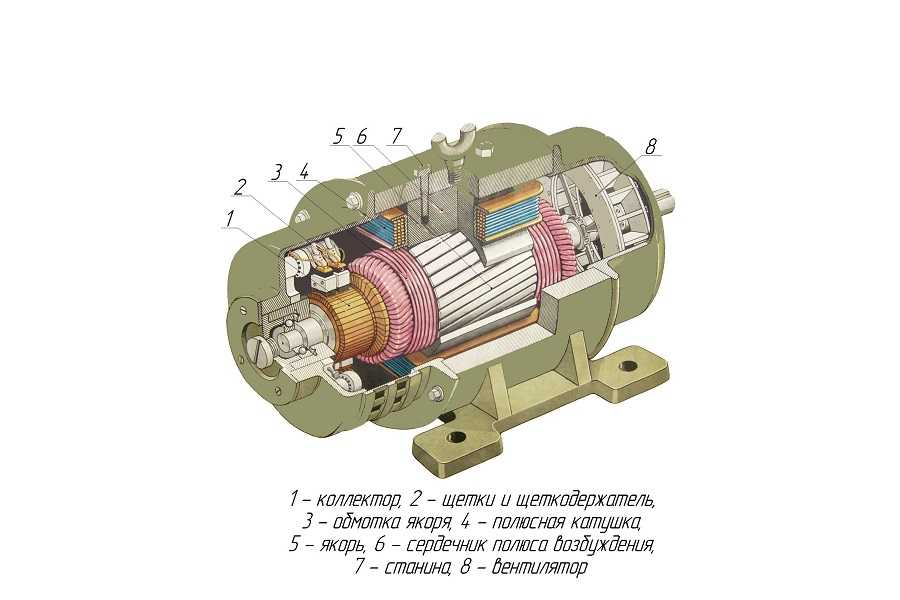
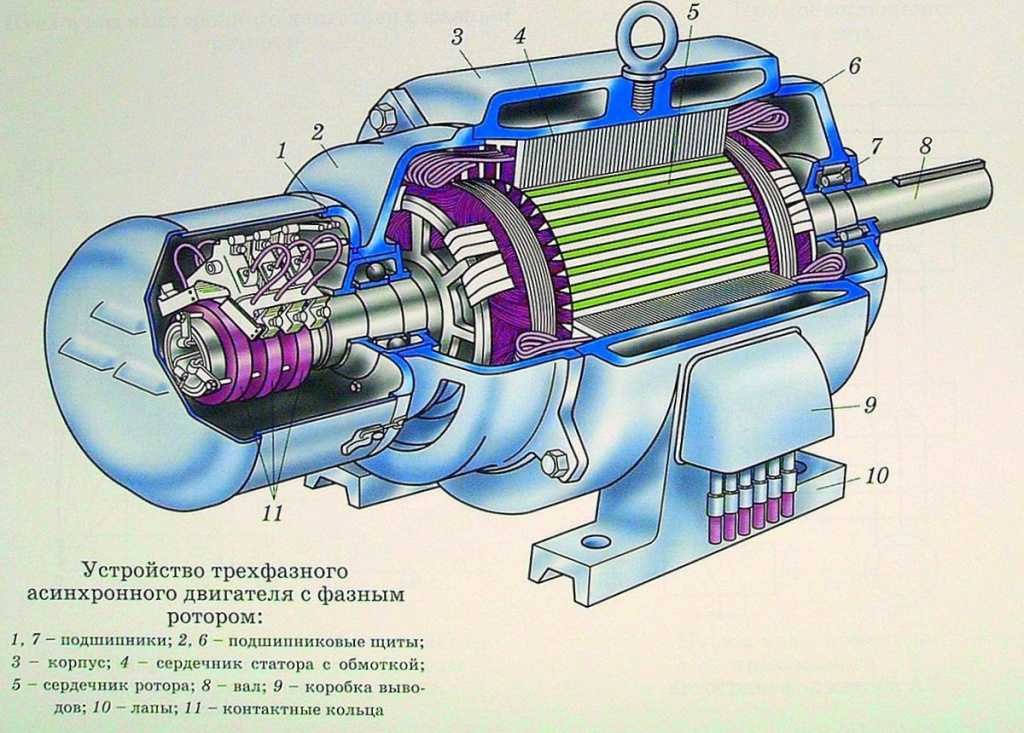
Строение асинхронного двигателя
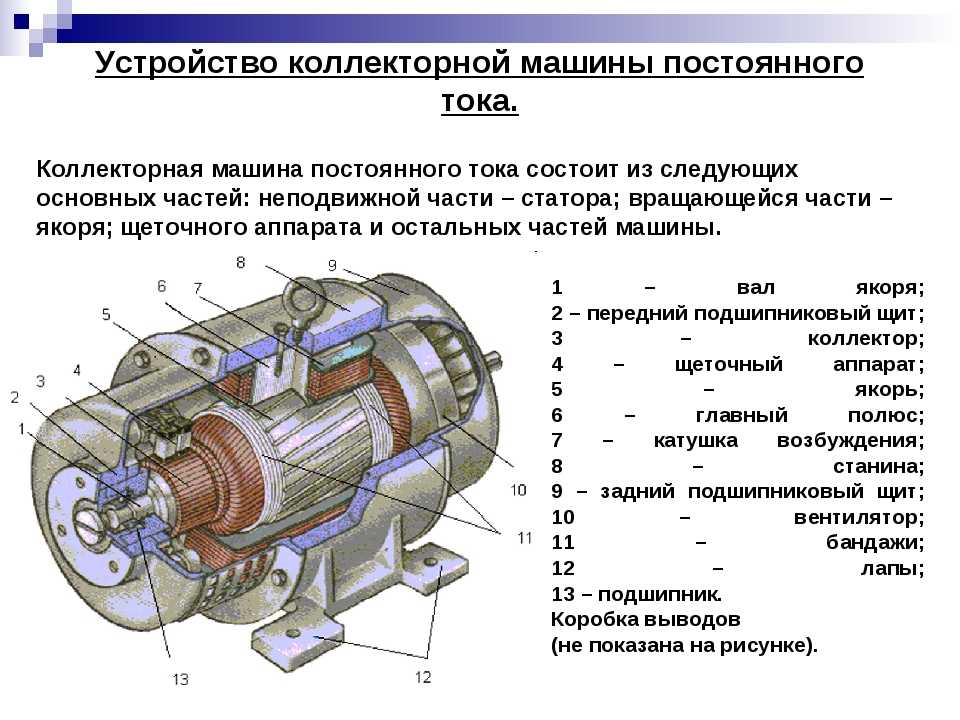
Для того, чтобы разобраться в теории работы двигателя, нам надо рассмотреть из чего же он состоит.
- Крышка клеммной коробки.
- Клеммная коробка.
- Стяжные болты корпуса.
- Вал ротора.
- Передняя крышка корпуса.
- Опорная плита корпуса.
- Корпус с ребрами охлаждения.
- Информационная табличка завода-изготовителя («шильдик»).
- Задняя крышка корпуса.
- Дополнительный вентилятор охлаждения двигателя («вертушка»). «Вертушка» устанавливается не на все двигатели. Если предполагаемое место работы обеспечивает хорошее воздушное охлаждение, то потребности в дополнительном обдуве не требуются.
На самом же деле асинхронный двигатель состоит из трех частей (слева-направо): ротора, статора и корпуса, но главными частями считаются именно ротор и статор, о которых мы с вами и поговорим.
Скольжение S
Параметр скольжения есть во всех асинхронных силовых агрегатах. Возникает данное явление из-за разницы в частоте вращения магнитного поля статора и ротора. Индуцируемая в стержнях ЭДС может появляться только при их движении относительно магнитного поля. Ротор при этом немного отстает.
Если скорости вращения одинаковы, в стержнях клетки не индуцируется ток, что делает невозможным дальнейшее движение. Поэтому в любом исполнении и рабочей нагрузке ротор движется с немного меньшей скоростью, чем магнитное поле.
Измерение скольжения производится в процентах. На холостом ходу данный показатель стремится к 0. При застопоренном роторе (КЗ) параметр равен 1. В асинхронной системе с короткозамкнутым ротором параметр скольжения зависит от нагрузки.
Краткая история создания
Впервые возможность превратить электричество в механическую энергию открыл британский ученый М.Фарадей еще в 1821 году. Его опыт с проводом, помещенным в ванну с ртутью, оснащенной магнитом, показал, что при подключении провода к источнику электроэнергии он начинает вращаться. Этот нехитрый опыт наверняка многие помнят по школе, правда, ртуть там заменяется безопасным рассолом. Следующим шагом в изучении этого феномена было создание униполярного двигателя – колеса Барлоу. Никакого полезного применения он так и не нашел, зато наглядно демонстрировал поведение заряженного проводника в магнитном поле.
На заре истории электродвигателей ученые пытались создать модель с сердечником, двигающимся в магнитном поле не по кругу, а возвратно-поступательно. Такой вариант был предложен, как альтернатива поршневым двигателям. Электродвигатель в привычном для нас виде впервые был создан в 1834 году русским ученым Б.С. Якоби. Именно он предложил идею использования вращающегося в магнитном поле якоря, и даже создал первый рабочий образец.
Первый асинхронный двигатель, в основе работы которого заложено вращающееся магнитное поле, появился в 1870 году. Авторами эффекта вращающегося магнитного поля независимо друг от друга стали два ученых: Г.Феррарис и Н. Тесла. Последнему принадлежит также идея создания бесколлекторного электродвигателя. По его чертежам были построены несколько электростанций с применением двухфазных двигателей переменного тока. Следующей более удачной разработкой оказался трехфазный двигатель, предложенный М.О. Доливо-Добровольским. Его первая действующая модель была запущена в 1888 году, после чего последовал ряд более совершенных двигателей. Этот русский ученый не только описал принцип действия трехфазного электродвигателя, но и изучал различные типы соединений фаз (треугольник и звезда), возможность использование разных напряжений тока. Именно он изобрел пусковые реостаты, трехфазные трансформаторы, разработал схемы подключения двигателей и генераторов.
Гибкие кабели
Моторы подъемных кранов располагаются на платформе поворотной конструкции, которая располагается на тележке, перемещаемой по мостовых балках кранов. Другие составные части устанавливаются на мостовых балках. Мотор соединяется с вышеописанными компонентами именно гибкими кабелями, которые располагаются на весу на тросе. При перемещениях телеги по мосту кабельные соединители двигаются следом. Сгибаясь в процессе работы жилы проводов могут ломаться, что в результате приводит к неисправностям.
Реализованы также модификации, вдоль мостов которых движутся дополнительные троллеи. При движении телеги токосъемные элементы, присоединенные к телеге ездят вместе с основным компонентом. Благодаря этому, напряжение подается напрямую на телегу с моста.
 Гибкие кабели на готовой конструкции
Гибкие кабели на готовой конструкции
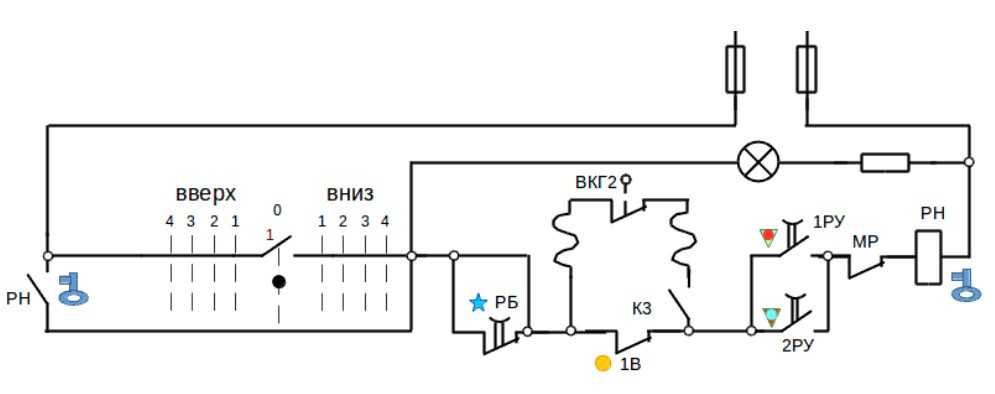
Контактор типа РН и контроллер
Итак, контроллер представляет собой точный агрегат, осуществляющий непосредственное управление краном. Отдельно на конструкции обозначается номер шайбы контроллерного элемента. Есть на корпусе и другие цифры, а также прерывистые линии, указывающие на актуальное положение контроллерного рычага. Черная точка, к примеру, идентифицирует замыкание контакта в выбранном положении. Если же точки нет, тогда контакт, соответственно разомкнут.
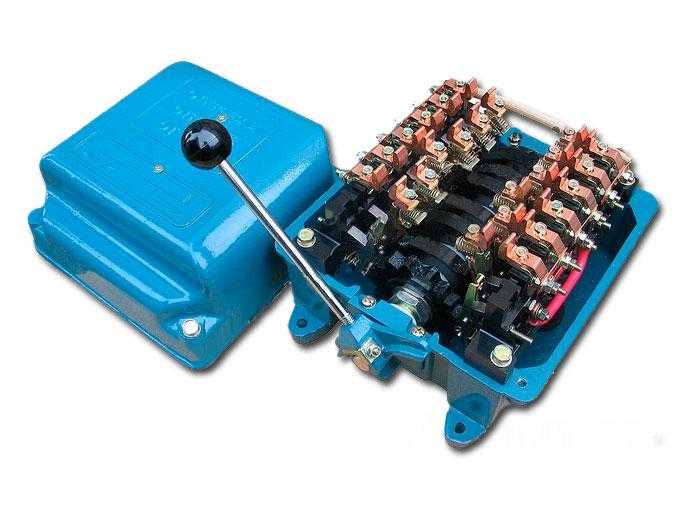
Второй обязательный элемент – контактор РН, функционал которого позволяет называть его реле. Возможности компонента по-настоящему широкие, в частности в них включен функционал пускателя. Деталь оборудована катушкой, через которую проходит ток и вследствие чего контакты замыкаются или размыкаются.





На схеме видно, что при «нулевом» положении контактора, соединительные элементы замыкаются и начинается подача напряжения на катушку РН контактора. В случае срабатывания контактора, агрегат задействует контакт для самостоятельного «подхвата». Этот компонент отличается тем, что может бесперебойно работать и в других положениях реле.
Отключает контроллер также довольно просто – выключением устройств 1 и 2 РУ. При запуске реле с максимальным током МР при перегрузках электромотора. Контакторы на 1В запускаются при подъеме крановой конструкции. Даже если при срабатывании РН устройство не выключается в ситуациях, когда цепочка шунтирования не размыкается. Включает цепочка также контакты из конечного выключателя типа ВКГ2, срабатывающий при поднятии веса на слишком большую высоту. Элемент реле К3 также присутствует, и он всегда находится в замкнутом положении при нормальном функционировании крана.
Отметим, что вышеупомянутое реле относится больше к защитным системам, применяемым в связи с технологическими особенностями кранов с траверсами. С их помощью груз можно поднимать вплоть до момента срабатывания конечного выключателя. Лампочка, находящаяся на схеме, сигнализирует оператору о нахождении контроллера в нулевом положении либо об активации контактора РН.
 Контроллер и контактор РН
Контроллер и контактор РН
А сейчас рассмотрим более подробно распространенные типы сетей.
В общем случае любая модель выполняет 3 операции:
фиксация груза — происходит его захват;
перемещение груза в нужную точку и разгрузка — рабочий ход;
возврат к первоначальному положению — холостой ход.
Дальше рабочий цикл крана повторяется. При этом во время рабочего и холостого хода могут возникать ускорения и торможения, во время которых появляются динамические нагрузки.
- Мостовые краны — их металлоконструкция представляет собой мост, по которому перемещается электрическая таль или тележка. В этот тип входят козловые и консольные машины, штабелеры и многие другие.
- Стреловые краны — их захватное устройство либо непосредственно на стреле, либо на передвигающейся по ней тележке. В этот тип входят портальные, башенные и другие машины.
- Кабельные краны — их захватный механизм установлен на тележке, передвигающейся направляющим канатам. Последние в свою очередь надежно зафиксированы в опорах, мобильных или стационарных.
- Козловые — их пролеты располагаются на опорах (с 1 или 2 стойками), передвигающимся по рельсовым путям, которые монтированы на надежное бетонное основание. Оснащаются тележками и грузозахватными устройствами.
- Портальные — с полным поворотом (на 360 градусов), движутся по рельсовому пути, проложенному по эстакаде или даже земле. Конструкция их может быть решетчатого, рамного, комбинированного типа.
- Башенные — поворотные, с телескопической или высотной конструкцией и молотовидной или подвесной стрелой. Могут быть на самоходном, приставном, прицепном, самоподъемном основании.
- Железнодорожные — с полным поворотом, монтируемые на специальные платформы, которые ходят по ЖД рельсам. Могут быть с механическим и ручным приводом, одними или многими двигателями.
-
Плавучие — они устанавливаются на остойчивые передвижные понтоны, как самоходные, так и нет. Могут быть поворотными, стационарными и комбинированными, козлового типа, с мачтой и качающейся стрелой.
-
Мачтовые — поворотные, стрела каждого из них с помощью шарниров соединяется с мачтовым пролетом, у которого есть и верхняя, и нижняя опора. Могут быть жестконогими и вантовыми.
-
Консольные — с механизмом захвата, установленным либо на тележку, либо на саму консоль, зафиксированную на ферме или же колонне. Могут быть настенными, колонными, двухплечевыми, передвижными.
-
Настенные — любой конструкции, которую только можно зафиксировать на неподвижной опоре. Могут быть передвижными, если их рельсовый путь будет проложен по стене.
-
Велосипедные — перемещающие грузы только в горизонтальной плоскости. Оборудованы электродвигателем, устанавливаются на однорельсовую наземную трассу.
Они применяются:
для монтажа металлоконструкций и строительных блоков, при строительстве зданий и сооружений; для подачи строительных материалов на верхние этажи строящихся зданий;для перемещения грузов на крюке по рабочей площадке на небольшие расстояния;для установки навесных вспомогательных устройств на крюке, таких как люльки, корзины.Все АСК оснащаются выносными опорами, обычно гидравлическими, для создания устойчивости в работе при обработке груза. Также, для этой цели применяют гидравлические стабилизаторы, обеспечивающие вывешивание заднего моста АСК и для блокировки рессор автомобиля, при отсутствии выносных опор.
Силовое оборудование АСК—двигатель автомобиля, обычно дизель. Привод АСК бывает одномоторным ( механический) и многомоторным (дизель с электрогенератором) и гидравлическим.Главным рабочим органом гидравлических АСК является телескопическая стрела, с изменяющейся длиной с использованием выдвижных секций. Количество секций телескопической стрелы может быть различным: от одной до четырёх. Секции, размещённые внутри стрелы, выдвигаются с помощью гидроцилиндров двойного действия или с помощью гидроцилиндров и канатного полиспаста, расположенного внутри телескопической стрелы.
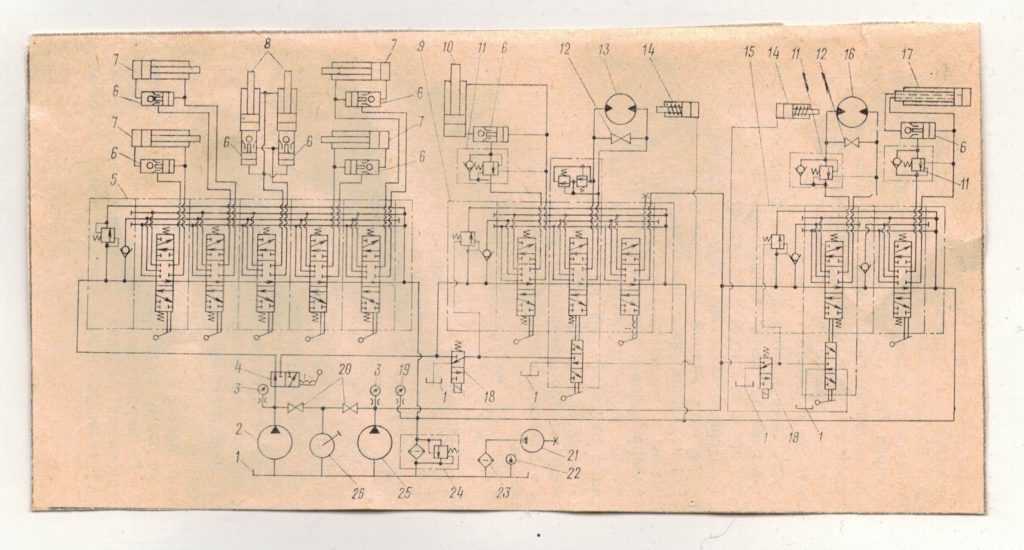
Как устроен АСК с гидравлическим управлением. (см. рис)
Гидравлический привод АСК применяют для выполнения следующих операций:изменение длины телескопической стрелы, путём выдвижения секций;подъём и пускание крюка с грузом;управление величиной угла поворота стрелы;поворот платформы с кабиной и стрелой на 3600 ;
Операция подъёма и опускания стрелы и поворот стрелы, могут совмещаться с поворотом платформы или с выдвижением-втягиванием секций телескопической стрелы.Управление гидроцилиндрами выдвижения выносных опор и гидроцилиндрами блокировки рессор подвески автомобиля может осуществляться автономно.
Телескопическая стрела может содержать несколько выдвижных секций. Секции, представляют собой балки коробчатого сечения, в т.ч. не выдвижная секция, которая шарнирно связана с поворотной платформой. На переднем конце крайней секции, установлены блоки грузового полиспаста или крановая подвеска.Выдвижение и втягивание секций телескопической стрелы осуществляет гидроцилиндр двойного действия а, при нескольких секциях, это происходит в определённой последовательности.

Грузовая лебёдка АСК состоит из канатного барабана и привода: гидромотора, редуктора и ленточного тормоза. Регулировка числа оборотов гидромотора позволяет поднимать и опускать груз с различной скоростью.
Поворотная платформа, установлена на ходовой раме шасси автомобиля с помощью опорно-поворотного устройства. Вращение платформы осуществляется с помощью гидромотора, редуктора и тормоза. Выходной вал редуктора оснащён шестерней, находящейся в зацеплении с зубчатым колесом опорно-поворотного устройства.Гидромоторы получают давление от гидронасосов, которые, в свою очередь, получают вращающий момент от силовой установки автомобиля-дизеля, через коробку передач и раздаточную коробку.
Механизм передвижения автомобиля получает вращающий момент от раздаточной коробки при выключенных насосах.Масло под давлением поступает от насосов по трубопроводам к гидравлической аппаратуре в кабине оператора, через поворотное соединение.Управление рабочими органами АСК осуществляет оператор из кабины с помощью гидравлических распределителей.Рабочее давление в системе поддерживается на уровне 12-16 МПа.
Фазные аппараты
Если общие затраты на работу короткозамкнутых асинхронных машин принять равными единице, то для фазных аппаратов они будут равны пяти, а для двигателей постоянного тока – десяти. Это объясняет, почему подавляющее большинство моторов на кранах именно трехфазные.
Для отечественной промышленности выпускаются электродвигатели различной нагревостойкости изоляции, обозначаемой буквой в модели аппарата: МТФ – 155○С, МТН – 180○С.
Электрические машины для мостовых, а также других кранов, серии МТН и МТКН выпускают с частотой вращения 600, 750 и 1 тыс. об/мин. при 50 Гц, а для частоты сети 60 Гц – 720, 900 и 1200 об/мин. Эта серия характеризуется высокой перегрузочной способностью, повышенным пусковым моментом при небольшом токе и быстрым разгоном.
https://youtube.com/watch?v=2apzcqHXmpU
Двигатели МТН имеют повышенную мощность за счет улучшенных характеристик изоляционных материалов, по сравнению с предыдущими моделями подобных электрических машин.
Пусковая аппаратура может представлять из себя мощные резисторы, несколько пускателей, постепенно закорачивающих ротор, и реле времени.
Схема с использованием мощных резисторов, нескольких пускателей, постепенно закорачивающего ротора, и реле времени
Подобные схемы успешно работают на мостовых кранах. После пуска двигатель МТН включается на полном значении сопротивлений в цепи ротора. Через определенное время, выставленное на реле времени, когда пусковой ток падает до номинала, включается первый контактор, который как бы «выбрасывает» часть сопротивлений и двигатель получает дополнительный момент, разгоняясь до следующего значения. В каждом отдельном случае количество резисторов и пускателей «выброса» может быть разное.
Когда включается последний пускатель, МТН выходит на свои полные обороты и работает как асинхронник с короткозамкнутым ротором. Крановые электродвигатели с фазным ротором можно использовать как для кратковременного режима работы, так и для постоянного.
Пониженная скорость
На современных мостовых кранах используется электронная схема, позволяющая получить пониженную, или «ползучую», скорость. Это бывает крайне необходимо в случаях погрузки опасных или негабаритных грузов, а также в случае, когда нужна очень точная погрузка.
Для этой цели используют тиристоры или симисторы. Получая напряжение с фазных колец ротора, схема устанавливает угол открытия тиристора согласно заданного значения. В результате, машинист может регулировать нужную скорость, если такая регулировка выведена в его кабину, либо включать заданное значение.
Торможение
Для торможения двигателя на мостовых, и не только, кранах, успешно применяют динамический режим: в обмотку статора, после отключения питания, кратковременно подают постоянное напряжение, имеющее неподвижное магнитное поле. Такой способ позволяет повысить точность остановки механизма.
Такое напряжение подают либо через гасящий резистор, либо при помощи понижающей схемы. После остановки двигателя его необходимо обесточить.
Правила работы с грузоподъемными машинами и механизмами
К работе по подъему грузов допускаются агрегаты, у которых есть зарегистрированный допуск к эксплуатации. Документ оформляется на основании комплекса проведенных испытаний. Оператор должен иметь соответствующую техническую подготовку, пройти инструктаж
Особое внимание уделяется грамотной фиксации подвешенной конструкции, подъёмного навесного механизма
При отсутствии постоянного крепления контроль положения во время перемещения выполняется напрямую стропальщиком, оператором, грузчиком. Для слаженной работы каждого из специалистов в условиях действующей стройки или производства часто используются заранее оговоренные сигнальные жесты.

В отдельных случаях возникает необходимость в дополнительной защите подвешенного товара от возможных повреждений, механических воздействий (особенно часто такие ситуации происходят при работе с веществами, которые представляют повышенную химическую, врыво-, пожароопасность). При автоматизации техники алгоритм движения зависит от параметров и свойств материала, особенностей технологического процесса.



Техника безопасности
Стандартные требования безопасности в работе с грузоподъёмными механизмами вне зависимости от их конструктивных особенностей и сферы использования – допуск лиц старше 18 лет в спецодежде, средствах индивидуальной защиты после прохождения обучения, инструктажа, сдачи экзаменов на наличие необходимых для выполнения поставленных задач навыков. Также необходимо выполнить следующие действия:
- проверить исправность узлов агрегата, приспособлений для захвата;
- убедиться в том, что уровень освещения достаточен для работы;
- использовать для обвязки стропы, которые соответствуют по своим параметрам весу перемещаемых конструкций;
- транспортировку мелких товаров выполнять в контейнере;
- не оставлять подвешенными конструкции на время перерыва;
- не допускать поднятия конструкций, которые примёрзли к земле, забетонированы, засыпаны землёй;
- выдерживать при подъёме минимум 0,5 м до самой высокой точки стационарных конструкций по траектории движения;
- не допускать перемещения над людьми.
https://youtube.com/watch?v=ajxYWhGmuHA
После окончания выполнения запланированных работ крюк поднимают, выключают рубильник. Грузозахваты убирают в место, предназначенное для хранения. При выявлении любых неисправностей, о них сообщают сменщику или мастеру цеха.
Области применения электродвигателей
Электродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии .
- Электродвигатели используются повсеместно, основные области применения:
- промышленность: насосы, вентиляторы, компрессоры, конвейеры, движущая сила для других машин и др.
- строительство: насосы, вентиляторы, конвейеры, лифты, системы отопления, вентиляции и кондиционирование воздуха и др.
- потребительские устройства: холодильники, кондиционеры, персональные компьютеры и ноутбуки (жесткие диски, вентиляторы), пылесосы, стиральные машинки, миксеры и др.
| ЭД1 | Функции | Области применения |
|---|---|---|
| Вращающиеся электродвигатели | Насосы | Системы водоснабжения и водоотведения |
| Системы перекачки охлажденной или нагретой воды, системы отопления, ОВК2, системы полива | ||
| Системы канализации | ||
| Перекачка нефтепродуктов | ||
| Вентиляторы | Приточно-вытяжная вентиляция, ОВК2, вентиляторы | |
| Компрессоры | Системы вентиляции, холодильные и морозильные установки, ОВК2 | |
| Накопление и распределение сжатого воздуха, пневматические системы | ||
| Системы сжижения газа, системы перекачки природного газа | ||
| Вращение, смешивание, движение | Прокатный стан, станки: обработка металла, камня, пластика | |
| Прессовое оборудование: обработка алюминия, пластиков | ||
| Обработка текстиля: ткачество, стирка, сушка | ||
| Смешивание, взбалтывание: еда, краски, пластики | ||
| Транспорт | Пассажирские лифты, эскалаторы, конвейеры | |
| Грузовые лифты, подъемные краны, подъемники, конвейеры, лебедки | ||
| Транспортные средства: поезда, трамваи, троллейбусы, автомобили, электромобили, автобусы, мотоциклы, велосипеды, зубчатая железная дорога, канатная дорога | ||
| Угловые перемещения (шаговые двигатели, серводвигатели) | Вентили (открыть/закрыть) | |
| Серво (установка положения) | ||
| Линейные электродвигатели | Открыть/закрыть | Вентили |
| Сортировка | Производство | |
| Хватать и перемещать | Роботы |
Примечание:
- ЭД — электродвигатель
- ОВК — системы отопления, вентиляции и кондиционирование воздуха
Типы портальных кранов
Каждый портальный кран способен выполнять большое количество разноплановых задач. Однако все они могут быть разделены по следующим категориям:
- перегрузочные;
- монтажные;
- строительные;
- судостроительные.
Перегрузочные аппараты применяются для загрузки и выгрузки морских и речных судов, железнодорожных вагонов. Они имеют постоянную грузоподъёмность, не зависимо от длины вылета стрелы. Отдельные конструкции портовых аппаратов оснащены специальным бункером, для обеспечения непрерывной разгрузки сыпучих грузов при интенсивном грузопотоке.

Монтажные краны применяются для выгрузки штучных грузов, особенно больших габаритов и массы. Отдельным видом таких агрегатов являются судостроительные и судоремонтные механизмы. Они применяются на верфях и судостроительных заводах. К ним относятся стапельный и достроечный.
Строительные краны устанавливаются на строительных площадках при возведении больших зданий и сооружений, где предполагается проведение работ в течение длительного времени.

В отдельных случаях применяются так называемый полупортальный кран. Его отличительной особенностью является расположение поворотной части. Она размещена на полупортале несущей конструкции, а вторая стойка расположена на другом уровне. Например, на выступе складского сооружения. На нём размещают второй рельс для обеспечения движения вдоль объекта.
Другие типы двигателей
Если возбуждение либо смешанное, либо параллельное, тогда эти обмотки можно не обесточивать. Это обусловлено техническими характеристиками данной электрической машины, рассчитанной на длительные режимы работы.
Если возбуждение у аппарата последовательное, то обмотки собираются из двух групп. При 220 в их собирают и подключают друг с другом последовательно, если 110 в – параллельно, а если двигатель питается от 440 в – последовательно-параллельно с добавочным резистором.
https://youtube.com/watch?v=ECtopI-EjUQ
Частота вращения регулируется двумя способами: ослаблением напряжения возбуждения или увеличением его на якоре.
Электродвигатели постоянного тока с параллельным возбуждением и стабилизирующей обмоткой, согласно своим характеристикам, допускают ускорение вращения в два раза от номинала при помощи уменьшения напряжения возбуждения. Если же это тихоходный тип двигателя, тогда можно увеличить скорость в 2,5 раза.
Однако стоит помнить о таком ограничении: для аппаратов на 220 в при увеличенной скорости вращающий момент должен быть не выше 0,8 Мн, а для двигателей на 440 в – не выше 0,64 Мн.
Электродвигатели для кранового хозяйства имеют свои характеристики, которые необходимо учитывать при установке их на соответствующие механизмы.
Продукция
Бренд выпускает большое количество с/х техники, самые востребованные – тракторы, системы точного земледелия и комбайны.
Сегодня выпускаются тракторы следующих серий:
- 6G.
- 9 серия TTV.
- 6 серия.
- 7 серия.
- Agrotron X720.
- Agrotron L720.
- Agrotron M620.
- Agrotron 180.
- Agrotrac 130/150/170.
- Agrofarm G115.
- Agrofarm G410/430.
- Agrolux 4.80.
- 6W Profi.
- Agroclimber F.
- Agroclimber.
- Agroplus F-V-S.
Системы точного земледелия используются на многих современных с/х предприятиях. Автоматизированное управление и синхронизация операций существенно увеличивает эффективность работ. Deutz-Fahr предлагает надежную и высокоточную автоматику. Система точного земледелия от Deutz-Fahr это:




- Прием сигналов с использованием всех спутниковых систем, в том числе корректирующих.
- Единый интерфейс для всех процессов и областей применения. Его диагональ может быть 8 или 12 дюймов.
- Системы рулевого управления представлены визуальным, рулевым механизмом с усилителем.
- Высокоточное секционное управление, которое исключает наложения и пропуски.
- Возможность полной автоматизации управления данными.
- Внедрена система безопасности для крупных тракторов, камеры имеет большой угол обзора.
Комбайны:
- Серия С9000.
- HTS 6060//6095.
- C6000.
Запасные части кранов
Для качественного выполнения поставленных задач, вся используемая техника должна быть в надлежащем рабочем состоянии, особенно это касается оборудования, которое используется для работы в условиях повышенной опасности. Подъемные краны предназначены для выполнения различных работ на высоте. Они приводятся в действие особым циклическим механизмом, который сначала совершает захват груза, потом следует начало рабочего хода и завершающий холостой ход возврата.
Выбирают кран, прежде всего, по его грузоподъемности, а значение остальных характеристик немного менее важно. Кран состоит из большого количества комплектующих, которые обеспечивают эффективное функционирование всей подъемной установки
Что представляет собой асинхронный двигатель
Асинхронным двигателем называется электрическая машина, способная переводить электрическую энергию в механическую. Получая электроток, она приходит в движение, которое используют непосредственно агрегаты — станки, автомобили и прочее. Асинхронным же двигатель называется, поскольку его магнитное поле всегда вращается быстрее, чем ротор. Для функционирования такого типа электродвигателя используется переменный ток.
Таким образом асинхронный двигатель состоит из двух основных узлов — ротора и статора. Будучи отделёнными друг от друга, они формируют магнитное поле между собой, которое и приходит в движение.
Статор в свою очередь состоит из:
- корпуса, скрепляющего все механизмы мотора. Как правило, они цельнолитые благодаря простоте изготовления и прочности;
- сердечника, состоящего из пластин из электрической стали. Он увеличивает магнитные и индукционные свойства аппарата;
- обмотки, устанавливается в пазы сердечника. Это катушки из медной проволоки, которая подключается непосредственно к самой сети.
Ротор устроен немного проще и имеет вентиляционную крыльчатку, которая передаёт механическую энергию от статора. Существует два вида роторов:
- массивный — использует цельную схему и ферромагнитного соединения;
- короткозамкнутый — на основе колец проводников.
Несмотря на различия в структуре, работают такие асинхронные двигатели по одному принципу.






