
Содержание
Режимы работы электродвигателей – это определенный порядок чередования периодов, который характеризуется:
- продолжительностью и величиной нагрузки;
- условиями охлаждения;
- частотой пуска и отключений;
- частотой реверса;
- соотношениями потерь в периоды установившегося движения и пуска.
Так как существует множество режимов, выпуск двигателей для каждого из них нецелесообразен, поэтому серийные двигатели проектируются согласно ГОСТ для работы в восьми номинальных режимах. Номинальные данные содержатся в паспорте электродвигателя. Оптимальное функционирование агрегата гарантируется при его эксплуатации при номинальной нагрузке и в номинальном режиме.
Факторы, влияющие на величину крутящих моментов
Из примера с лошадью легко догадаться, что в данном случае значение КМ будет во многом определяться мышечной массой животного. Применительно к автомобильному двигателю внутреннего сгорания эта величина зависит от рабочего объема силовой установки, а также от:
- уровня рабочего давления внутри цилиндров;
- размера поршня;
- диаметра кривошипа коленвала.
Прямая зависимость наблюдается также между КМ и радиусом кривошипа коленвала. Однако конструкция современных автомобильных двигателей такова, что не позволяет варьировать значения момента в широких пределах, из-за чего возможности добиться повышенного крутящего момента за счет радиуса кривошипа коленчатого вала у конструкторов ДВС невелики. Вместо этого разработчики прибегают к таким способам увеличить момент, как использование технологий турбонаддува, увеличение степени сжатия, оптимизация процесса сгорания топлива, использование впускных коллекторов специальных конструкций, и т.д.
Важно, что КМ увеличивается с ростом оборотов двигателя, однако после достижения максимума на определенном диапазоне крутящий момент понижается несмотря на продолжающийся прирост частоты вращения коленвала
Периодичекий кратковременный режим с пусками — типовой режим S4
Периодический кратковременный режим электродвигателя с пусками (типовой режим 54) – последовательность одинаковых рабочих циклов, включающих достаточно длительный период пуска, период работы с постоянной нагрузкой и период покоя, см. рис. (D – пуск; N – работа при постоянной нагрузке; R – состояние покоя; Omax– максимальная температура, достигнутая в течение цикла).
Продолжительность включения, %: ПВ = 100 (D+N) /(D+N+R).
В соответствии с ГОСТ 183 продолжительность включений (ПВ): 15, 25, 40 и 60%; число включений в час 30, 60, 120 и 240 при коэффициенте инерции FI, равном 1,2; 1,6; 2,0; 2,5; 4,0; 6,3 и 10.
Метод — эквивалентный момент
Метод эквивалентного момента является производным от метода эквивалентного тока, как так для большинства двигателей момент пропорционален току.
Метод эквивалентного момента неприемлем для двигателей, у которых поток не остается постоянным, как это имеет место, например, у двигателей последовательного возбуждения.
Метод эквивалентного момента допустим для очень приближенных расчетов мощности электродвигателей трехфазного тока с контактными кольцами и двигателей постоянного тока со смешанным возбуждением. Еще менее точен он для двигателей с последовательным возбуждением. Метод совершенно не пригоден для двигателей с короткозамкнутым ротором при частых пусках. При малых загрузках крановых двигателей трехфазного тока метод эквивалентного момента дает большие ошибки из-за большой величины тока холостого хода этих двигателей.
|
График нагрузки двигателя. |
Метод эквивалентного момента не пригоден для электродвигателей постоянного тока последовательного и смешанного возбуждения. Определение мощности двигателя для повторно-кратковременного режима работы производится с учетом продолжительности включения ПВ, так как каждой величине ПВ соответствует определенная номинальная мощность.
|
График нагрузки двигателя при длительном режиме. Общий случай.| График нагрузки двигателя при кратковременном режиме работы, приведенный к одноступенчатой форме. |
Метод эквивалентного момента неприменим к двигателям постоянного тока последовательного и смешанного возбуждения при работе с переменным потоком. Если М и Р пропорциональны току, то методы эквивалентных момента и мощности применимы во всех случаях, где применим метод эквивалентного тока.
Метод эквивалентного момента применим и nL ре по мощности асинхронных двигателей в тех с а.
Метод эквивалентного момента применим для двигателей постоянного тока независимого возбуждения, а также для асинхронных и синхронных двигателей, работающих с номинальными магнитными потоками.
Метод эквивалентного момента является производным от метода эквивалентного тока, так как для большинства двигателей момент пропорционален току. Исключение составляют двигатели последовательного возбуждения при нагрузках, значительно меньших номинальных.
Проверка по нагреву методом эквивалентного момента приемлема для двигателей постоянного тока независимого возбуждения, а также асинхронных и синхронных двигателей, работающих с номинальным магнитным потоком.
Совершенно очевидно, что метод эквивалентного момента не всегда способен дать точный результат и, значит, не всегда может быть применен.
Для расчета мощности электродвигателя использован метод эквивалентного момента.
Для двигателей последовательного возбуждения применение метода эквивалентного момента дает большую ошибку, выбор этого типа двигателей целесообразно производить, пользуясь методом эквивалентного тока.
|
Нагрузочная диаграмма электродвигателя при длительной переменной нагрузке. |
Продолжительный режим S1
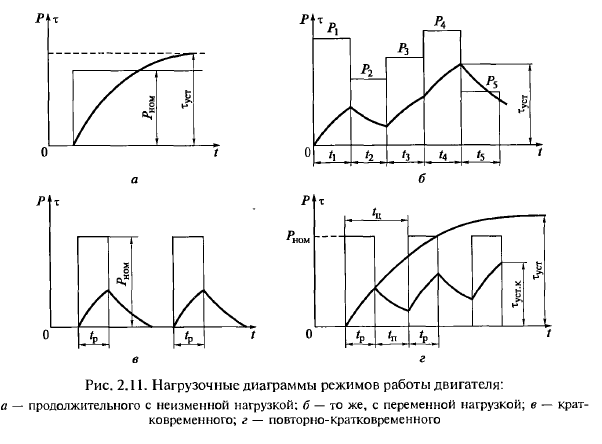
1. Продолжительный режим S1 — когда при неизменной номинальной нагрузке Рном работа двигателя продолжается так долго, что температура перегрева всех его частей успевает достигнуть установившихся значений τуст (тау установившееся).
Различают продолжительный режим с неизменной нагрузкой Р = const (рис. 2.11, а) и продолжительный режим с изменяющейся нагрузкой (рис.2.11, б). Например, электроприводы насосов, транспортеров, вентиляторов работают в продолжительном режиме с неизменной нагрузкой, а электроприводы прокатных станков, металлорежущих станков и т.п. работают в продолжительном режиме с изменяющейся нагрузкой.
Советуем изучить — Расчетные формулы основных параметров асинхронных двигателей
Эквивалентное сопротивление что это?
Что такое эквивалентное сопротивление?
эквивалентное сопротивление импульсного трансформатора — Электрическое сопротивление, равное отношению произведения внутреннего сопротивления генератора и приведенного сопротивления нагрузки по эквивалентной схеме импульсного трансформатора к их сумме Тематики трансформатор… …
Как найти R эквивалентное формула?
е. эквивалентное сопротивление. Точно так же для каждой ветви I1 = U1 / R1, I2 = U2 / R2, где I1 и I2 — токи в ветвях; U1 и U2 — напряжение на ветвях; R1 и R2 — сопротивления ветвей.
Как найти общее сопротивление в треугольнике?
Расчет сопротивления схемы с преобразованием треугольник-звезда. Сопротивления R12, R13, R23 найдены по формулам 1-3: Чтобы найти сопротивление луча звезды надо произведение сопротивлений прилегающих к нему сторон треугольника разделить на сумму сопротивлений всех сторон треугольника.
Как найти сопротивление по схеме?
Если известны значения общей силы тока и напряжения в цепи, общее сопротивление вычисляется по закону Ома: R = V/I. Например, напряжение в параллельной цепи равно 9 В, а общая сила тока равна 3 А. Общее сопротивление: RO = 9 В / 3 А = 3 Ом.
https://youtube.com/watch?v=OP6nJnzO1Sc
Как найти эквивалентное сопротивление в цепи?
Формулы для эквивалентных сопротивлений цепи, состоящей из пары резисторов R1 и R2, можно выделить в определённый ряд:
- параллельное присоединение определяют по формуле Rэкв. = (R1*R2)/R1+R2;
- последовательное включение вычисляют, определяя его сумму Rэкв. = R1+R2.
Чему равно эквивалентное сопротивление?
Резисторы соединены последовательно, если по ним течет один и тот же ток. Эквивалентное сопротивление цепи, состоящей из n последовательно соединенных резисторов, равно сумме их сопротивлений: .
Как найти R в параллельном соединении?
Общее сопротивление цепи при параллельном соединении проводников определяется по формуле: 1 R = 1 R 1 + 1 R 2 . Обратное значение общего сопротивления равно сумме обратных значений сопротивлений отдельных проводников. Для проверки формулы можно использовать омметр.
Как найти напряжение?
Звучит эта формула следующим образом — электрическое напряжение равно отношению мощности к силе тока (чтобы найти напряжение нужно мощность разделить на ток). Сама же мощность находится путем перемножения тока на напряжение.
https://youtube.com/watch?v=YsXLKb-vJLg
Как найти r2 при параллельном соединении?
Рассчитывается общее сопротивление при параллельном соединении по формуле: 1 / Rобщ = (1 / R1) + (1 / R2) + … + (1 / Rn). Если выполнить математические преобразования и привести к общему знаменателю, то получится удобная формула параллельного соединения для расчета Rобщ.
Как найти общее сопротивление в электрической цепи?
Формула для вычисления общего сопротивления последовательной цепи: Req = R1 + R2 + …. Rn где n — общее количество резисторов в цепи, соединенных последовательно. Таким образом, сопротивления всех резисторов просто суммируются. Например, найдем сопротивление цепи, показанной на рисунке.
Как определить общее сопротивление сложной цепи?
R = R1 + R2. При последовательном соединении полное сопротивление цепи равно сумме сопротивлений отдельных проводников. Этот результат справедлив для любого числа последовательно соединенных проводников. При параллельном соединении (рис.
В чем разница между соединением звездой и треугольником?
В схеме соединения треугольник конец одной обмотки монтируется с началом следующей обмотки. Электродвигатель с обмотками, соединенными звездой работает более плавно, чем двигатель с соединением в треугольник. … При соединении в треугольник мощность двигателя почти в полтора раза выше, чем при соединении в звезду.
https://youtube.com/watch?v=Gr2MQcV_zJc
Как рассчитать сопротивление динамика?
При последовательном соединении сопротивление динамиков рассчитывается по формуле: R = R1 + R2, где R — сопротивление, которое мы получим в результате такого соединения, а R1 и R2 — сопротивление динамиков 1 и 2. Сопротивление большего количества динамиков рассчитывается аналогично: R = R1 + R2 + R3 + …
Как рассчитать сопротивление на участке цепи?
Сопротивление на участке цепи рассчитывается по классической формуле R = U I . Для этого необходимо установить значения напряжения и тока. Сопротивление – отношение напряжения к току.
голоса
Рейтинг статьи
На что влияет мощность и крутящий момент?
Мощность преодолевает силу трения в движке, приводах и трансмиссии, аэродинамические нагрузки, а также силу качения колес. Чем больше мощность силового агрегата, тем лучше автомобиль сопротивляется этим силам, а соответственно способен достигать большей скорости.
При движении автомобиль преодолевает силу трения в движке, приводах, трансмиссии и т.д.
Но мощность зависит от оборотов движка – на холостом ходу она значительно меньше, нежели на максимальных оборотах. Как правило, производители указывают какого числа оборотов нужно достичь, чтобы получить максимальную мощность.
Сразу при старте большую мощность развить невозможно, так как в начале движения автомобиль работает на малых оборотах. Движок выдает полную мощность только по истечении некоторого времени, которое определяет крутящий момент. Другими словами он определяет то, как быстро автомобиль будет набирать обороты. А от числа оборотов, которое выдает двигатель, зависит запас его силы.
К примеру, если максимальное число оборотов составляет 6000, то за счет большего запаса, педаль газа будет уже не так легко вжиматься в пол. Но с другой стороны двигатель будет дольше набирать все эти обороты, а значит медленнее развивать скорость. А чем выше будет крутящий моменту двигателя, тем стремительнее будут набираться обороты и «лошадиные силы» будут более ощутимы при нажатии на педаль газа.
Бывает, что и при высоком значении крутящего момента автомобиль разгоняется медленно. Это связано с тем, что движку нужно набрать определенное число оборотов, а после их достижения включается его максимальный крутящий момент. Он позволяет двигателю быстрее реагировать на действия водителя.
Но зависимость крутящего момента от мощности
есть, потому что мощность характеризует непосредственно работу движка, а точнее – количество совершенных силовым агрегатом крутящих моментов за определенную единицу времени. То есть крутящий момент – это та самая работа двигателя.
Прикреплённые товары
- Высоковольтные электродвигатели АВВ в чугунном корпусе 18.10.2019 Высоковольтные взрывозащищенные электродвигатели, работающие с напряжениями до 11 кВ, являются наиболее распространенными электродвигателями в…
Все статьи
- Электродвигатели АББ: подшипники 03.06.2019
Обычно в электродвигателях общего назначения устанавливаются однорядные шариковые подшипники с глубокими канавками, как указано в приведенной…
Все статьи
- Применение смазочных материалов Brevini DANA 14.03.2019
Планетарный редуктор серий E/EC, PD/PDA, PDL/PDC, SL/SC, RPR, CTD, BPH по сравнению с редукторами других типов является механизмом, требующим…
Все статьи
Расчет мощности и выбор двигателя для повторно-кратковременного режима
Для электропривода, работающего в повторно-кратковременном режиме, мощность двигателя рассчитывают методом средних потерь или эквивалентных величин. Первый метод более точный, но более трудоемкий. Удобнее пользоваться методом эквивалентных величин. В зависимости от заданного графика нагрузки Р = f ( t), М = f ( t) определяют среднеквадратичные величины, которые называют эквивалентными.
Эквивалентная мощность представляет собой среднеквадратичную мощность нагрузочной диаграммы
где t 1, t 2,…, t к — промежутки времени, в которые мощность нагрузки соответственно равна Р 1, Р 2,…, Р к. По каталогу для полученных значений Р ЭКВ и ПВ выбирают номинальную мощность двигателя из условия Р н ³ Р ЭКВ.
Мощность и вращающий момент электродвигателя
Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса.
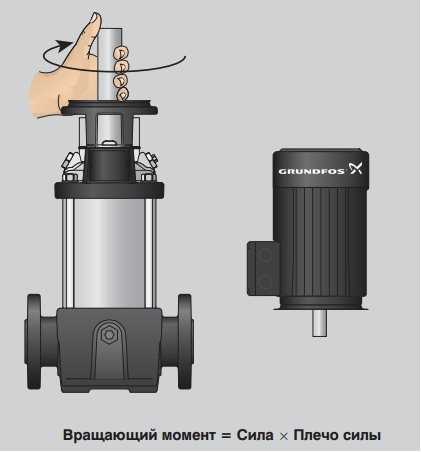
Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие.
А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт.
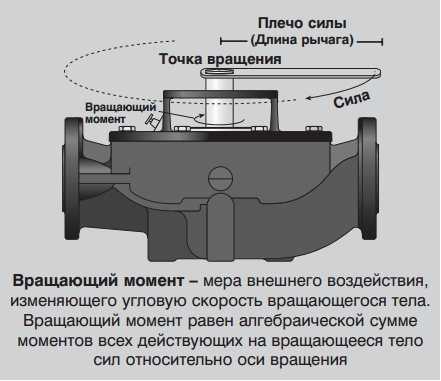
Вращающий момент (T) — это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм).
Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы — или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н.

https://youtube.com/watch?v=_XW8pt8pQYQ
https://youtube.com/watch?v=BboAX0lwqLE
https://youtube.com/watch?v=kYuowXDTQDU
Мощность приводного двигателя
Точный расчет мощности приводного двигателя производится на основании диаграммы движущих усилий и выполняется в следующей последовательности:
— определяется эквивалентное усилие по выражению
Для пятипериодной диаграммы скорости (рис.2.3) числитель формулы (2.52) состоит из пяти членов и рассчитывается так:

Где
При расчетах принимается
Применяем механический тормоз пружинно-гидравлический, тогда

= 1.64

— определяется эквивалентная мощность приводного двигателя
Окончательно по каталогу принимается двигатель АКН -17-39-25 по эквивалентной мощности. (Р= 1000 кВт, n= 295 об/мин)
— выбранный по каталогу двигатель проверяется по условиям пусковой перегрузки
Где Fmax – максимальное усилие из диаграммы движущих усилий;
Fн – номинальное усилие выбранного двигателя, рассчитываемое по выражению
Взвод: выбранный по каталогу подходит по условиям пусковой перегрузки
голоса
Рейтинг статьи
§ 108. Вращающий момент асинхронного двигателя
Принцип действия асинхронного двигателя, как указывалось, основан на взаимодействии вращающегося поля и тока, индуктированного этим полем в обмотке ротора. В результате взаимодействия магнитного потока Φ с током I2, протекающим в проводниках обмотки ротора, возникают электромагнитные силы, приводящие ротор во вращение.
Поэтому вращающий момент, создаваемый на валу двигателя, зависит от величины тока ротора I2 и от магнитного потока Φ.
Кроме того, на величину вращающего момента асинхронного двигателя влияет сдвиг фаз Ψ2 между током I2 и э.д.с. ротора. Для уяснения влияния cos Ψ2 рассмотрим картину электромагнитных сил, действующих на проводники ротора.
Рассмотрим сначала случай, когда индуктивность обмотки ротора мала и поэтому сдвигом фаз между током и э.д.с. можно пренебречь (рис. 255, а). Вращающееся магнитное поле статора здесь заменено полем полюсов N и S, вращающимся, предположим, по направлению часовой стрелки. Пользуясь правилом «правой руки», определяем направление э.д.с. и токов в обмотке ротора. Токи ротора, взаимодействуя с вращающимся магнитным полем, создают момент вращения. Направления сил, действующих на проводники с током, определяются по правилу «левой руки». Как видно из чертежа, ротор под действием электромагнитных сил будет вращаться в ту же сторону, что и само вращающееся поле, т. е. по часовой стрелке.
Рис. 255. Электромагнитные силы, действующие на проводники ротора: а — при отсутствии индуктивности, б — при наличии индуктивности
Рассмотрим второй случай, когда индуктивность обмотки ротора относительно велика. В этом случае сдвиг фаз между током ротора I2 и э.д.с. ротора будет также значительным. На рис. 255, б магнитное поле статора асинхронного двигателя по-прежнему показано в виде вращающихся по направлению часовой стрелки полюсов N и S. Направление индуктированной в обмотке ротора э.д.с. остается таким же, как и на рис. 255, а, но вследствие запаздывания тока по фазе максимум тока I2 наступает позднее, чем максимум э.д.с.
На рис. 255 показано направление индуктированных токов в отдельных проводниках ротора в рассматриваемый момент времени, а также направления отдельных электромагнитных сил, действующих на проводники. Если Ψ2 = 0, то все электромагнитные силы будут действовать согласованно. При большем Ψ2 часть электромагнитных сил создают вращающий момент, направленный по часовой стрелке, а остальные силы — против часовой стрелки.
Магнитный поток Φ не зависит от скорости вращения ротора n. Следовательно, вращающий момент М пропорционален только активной составляющей тока ротора I2 cos Ψ2. Индуктивное сопротивление ротора Х2 = 2πfL2, а следовательно, и величина cos Ψ2 зависят от частоты тока ротора f2 и поэтому с изменением нагрузки на валу ротора изменяется не только величина тока I2, но и величина cos Ψ2. Таким образом, изменение вращающего момента, развиваемого двигателем, с изменением скорости вращения (и скольжения) определяется одновременно как изменением тока I2, так и изменением cos Ψ2.
На основании математического анализа и экспериментального исследования можно построить график зависимости вращающего момента асинхронного двигателя М от скольжения S (рис. 256). Так как каждому значению S соответствует определенное значение n = n (1 — S), то указанный график можно представить и как зависимость вращающего момента от скорости n. Зависимость между вращающим моментом М и скольжением S называется механической характеристикой двигателя (рис. 256).
Рис. 256. Механические характеристики асинхронного двигателя
На кривой А видно, что в начальный момент пуска, когда S = 1 и n = 0, вращающий пусковой момент двигателя относительно невелик. Это объясняется тем, что в момент пуска частота тока в обмотке ротора наибольшая и индуктивное сопротивление обмотки велико. Вследствие этого cos Ψ2 имеет малое значение (около 0,1-0,2). Поэтому, несмотря на большую величину пускового тока, пусковой вращающий момент будет наибольшим. По мере разгона двигателя скольжение уменьшается.
При некотором скольжении S1, называемом критическим, вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения (или, иначе говоря, при дальнейшем увеличении скорости вращения двигателя) вращающий момент будет быстро уменьшаться и при скольжении S = 0 момент двигателя будет равен нулю. Этот режим соответствует идеальному холостому ходу, когда двигатель не нагружен, а механическими потерями (на трение) можно пренебречь.
Что означает понятие крутящий момент детально
Многие ли из нас понимают в мощности автомобилей и что означают лошадиные силы? Никогда не приходила мысль сравнить автомобиль мощностью 100 л.с. с повозкой со ста скакунами, и что как-то странно сравнивать движок в 1,6 литра с сотней лошадей, которые и танк с места сдвинут а не только малолитражную машину?
Это ошибочное сравнение и вот почему.
Итак, давайте разберемся что есть мощность двигателя. В научном определении под мощностью понимается скорость преобразования и передачи энергии. Для двигателя это работа, которую он проделывает за единицу времени. Мощность двигателя измеряется в Ваттах, хотя нам более привычно измерять в лошадиных силах.
Единицу измерения в одну лошадиную силу получили опытным путем и определяется она как способность лошади поднять 75 кг на один метр в секунду, т.е. лошадиная сила равняется 735 Ваттам. Вместо переносимого веса используют крутящий момент, который равен силе, возникающей на определенном радиусе.
Крутящий момент — это механическая энергия от воспламеняющейся смеси в цилиндре, которая передается на коленчатый вал, трансмиссию, раздаточную передачу, колеса, и толкает, заставляя автомобиль двигаться. Обороты двигателя оказывают самое прямое влияние на крутящий момент.
Для примера возьмем мотор от Форд Фокуса объемом 1,6 л., который развивает мощность 100 л.с. и обладает крутящим моментом 150 Н*м.
Если учесть, что в килограмме десять ньютон, и если приделать к валу двигателя прут длиной 1 метр, то для того, чтобы не дать двигателю вращаться, достаточно повесить на этот прут всего 15 кг. 150 Н*м — это максимальный крутящий момент который развивается при оборотах двигателя близким к 4000 оборотам в минуту.
Так почему же двигатель, который можно удержать одной рукой, имеет характеристики 100 л.с.? Все это потому, что мощность зависит не только от силы, развиваемой на валу двигателя, но и от скорости вращения этого вала. Чем больше оборотов способен развивать двигатель, тем он мощнее.
С увеличением рабочего объема возрастает сила, которая действует на поршень и на крутящий момент. Также, чем сильнее давление в камере сгорания цилиндра, тем сила, давящая на поршень, больше. Чем больше площадь поршня тем меньше сила и удельное давление.
К примеру, 2-х литровых двигатель СкайЭктив от Мазды, развивающий 150 л.с., будет существенно шустрее разгонять автомобиль, чем 2-х литровый бензиновый двигатель Киа или Хёндэ и не только потому, что первый развивает больше крутящий момент, а потому, что он развивается раньше и полка крутящего момента у него шире за счёт большей компрессии в цилиндрах.
Высокий крутящий момент помогает автомобилю быстрее ускориться на разгоне при небольших оборотах коленвала, улучшаются тяговые свойства силового механизма, например, грузоподъемность машины и ее проходимость.
Максимальный показатель крутящего момента достигается мотором при конкретных оборотах. Бензиновые моторы имеют более высокое значение, нежели дизельные двигатели.
Наибольший крутящий момент у четырех цилиндрованного бензинового мотора достигается при 4000 оборотах (примерно 192 н*м), у турбированного 4х цилиндрового при 4500 оборотах (265 н*м), а у дизельного 4-х цилиндрового движка — при 2750 оборотах (400 н*м).
Какой двигатель лучше исходя из крутящего момента? Это спорный вопрос — все зависит от назначения. Если вы ездите на микроавтобусе либо занимаетесь грузоперевозками, то для вас важна тяга с нижних оборотов — тогда подойдет дизель с его низко оборотистым двигателем и высоким крутящим моментом (т.е. он тянуть будет просто бешено). Когда необходима высокая скорость — вы любите раскручивать двигатель до 6000-6500 оборотов в минуту, то здесь необходим бензин.
Автоконцерны придумывают разные способы чтобы увеличить крутящий момент, используя турбонаддув, управляемых фаз газораспределения, увеличения степени сжатия, благодаря конструктивных инновациям ДВС и т.д.
Режимы работы электродвигателей
Режимы работы электродвигателей – это определенный порядок чередования периодов, который характеризуется:
- продолжительностью и величиной нагрузки;
- условиями охлаждения;
- частотой пуска и отключений;
- частотой реверса;
- соотношениями потерь в периоды установившегося движения и пуска.
Так как существует множество режимов, выпуск двигателей для каждого из них нецелесообразен, поэтому серийные двигатели проектируются согласно ГОСТ для работы в восьми номинальных режимах. Номинальные данные содержатся в паспорте электродвигателя. Оптимальное функционирование агрегата гарантируется при его эксплуатации при номинальной нагрузке и в номинальном режиме.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
Периодический кратковременный режим с электрическим торможением — типовой режим S5
Периодический кратковременный режим с электрическим торможением (типовой режим S5) – последовательность одинаковых рабочих циклов электродвигателя, каждый из которых состоит из периода пуска, периода работы с постоянной нагрузкой, периода быстрого электрического торможения и периода покоя, см. рис. (D –пуск; N – работа при постоянной нагрузке: R – состояние покоя; Omax– максимальная температура, достигнутая в течение цикла; F –электрическое торможение). Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения, %: ПВ=100(Д+ N+ F)/(D+ N + F + К).
В соответствии с ГОСТ 183 продолжительность включения (ПВ) 15, 25, 40 и 60%; число включений в час 30, 60, 120 и 240 при коэффициенте инерции равном 1,2;. 1,6; 2,0; 2,5 и 4,0.
Периодический кратковременный режим с электрическим торможением — типовой режим S5
Периодический кратковременный режим с электрическим торможением (типовой режим S5) – последовательность одинаковых рабочих циклов электродвигателя, каждый из которых состоит из периода пуска, периода работы с постоянной нагрузкой, периода быстрого электрического торможения и периода покоя, см. рис. (D –пуск; N – работа при постоянной нагрузке: R – состояние покоя; Omax– максимальная температура, достигнутая в течение цикла; F –электрическое торможение). Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения, %: ПВ=100(Д+ N+ F)/(D+ N + F + К).
В соответствии с ГОСТ 183 продолжительность включения (ПВ) 15, 25, 40 и 60%; число включений в час 30, 60, 120 и 240 при коэффициенте инерции равном 1,2;. 1,6; 2,0; 2,5 и 4,0.