
Плюсы и минусы электродвигателя
Преимуществ перед ДВС у электродвигателя много:
- малый вес и достаточно компактные размеры. К примеру, инженеры Yasa Motors разработали мотор весом 25 кг, который может выдавать до 650 Нм;
- долговечность, простая эксплуатация;
- экологичность;
- максимальный крутящий момент доступен уже с 0 об/мин;
- высокий КПД;
- нет необходимости в коробке передач. Хотя, по мнению специалистов, электромобилю она не помешает;
- возможность рекуперации.
Как выглядит роторОбратите внимание! Существенных недостатков у самого электродвигателя нет. Но есть большие сложности в его питании
Несовершенство источников тока не дают пока что массово использовать электродвигатели в автомобилестроении.
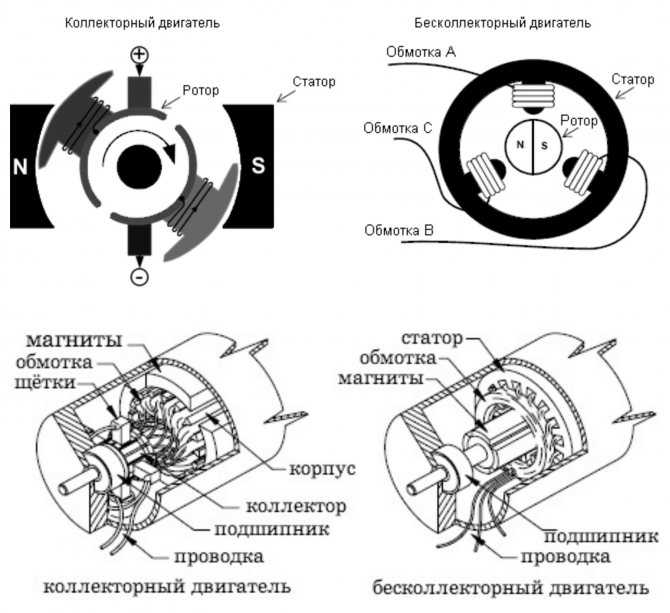
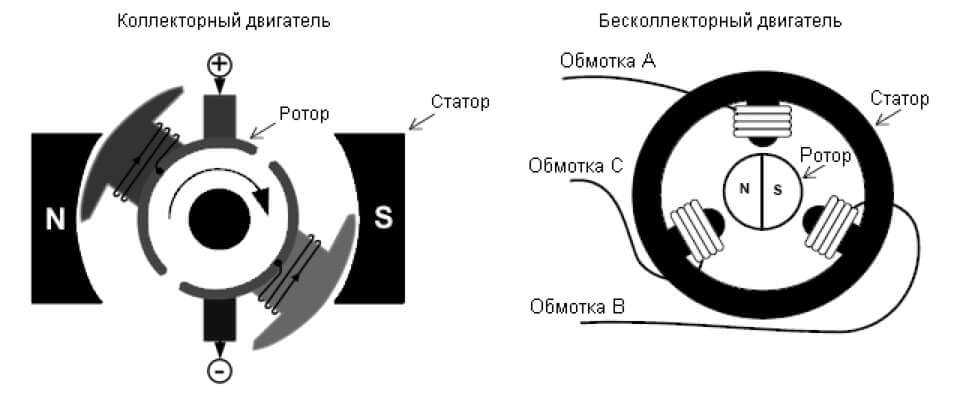
Коллекторный двигатель
Начнём с того, что двигатель — это устройство, которое преобразует какой-либо вид энергии в механический и наоборот. Эффективность данного процесса зависит от внутренней конструкции двигателя, которая в свою очередь зависит от источника тока (постоянного или переменного).
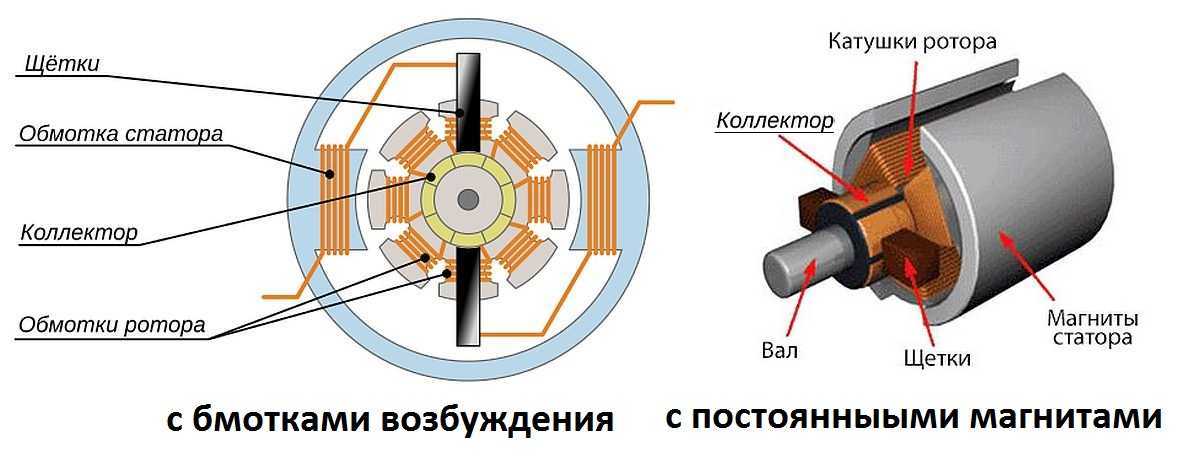
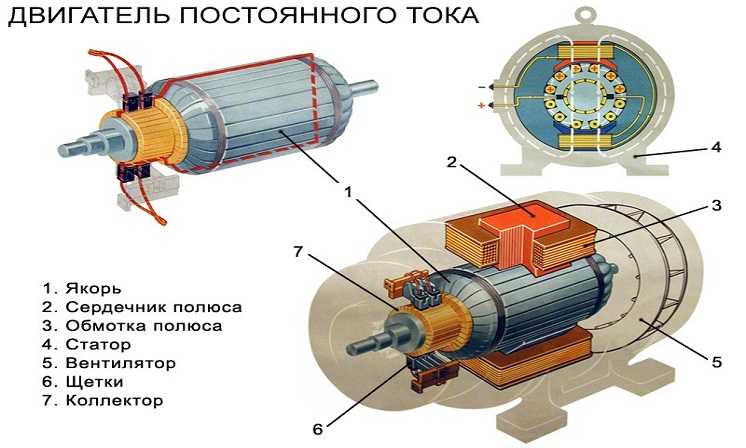
Устройство коллекторного двигателя
Якорь.
Стержнем всей конструкции является якорь, он же металлический вал. Вал является движущимся элементом, от которого зависит крутящий момент. На нём также располагается ротор.
Ротор.
Связан с ведущим валом. Его внешняя конструкция напоминает барабан, который вращается внутри статора. Задача ротора получать или отдавать напряжение рабочему телу.
Подшипники.
Они расположены на противоположных концах якоря для его сбалансированного вращения.
Щётки.
Выполнены обычно из графита. Их задача предавать напряжение через коллектор в обмотки.
Коллектор (коммутатор).
Он выполнен в виде соединенных между собой медных контактов. Во время процесса вращения он принимает на себя энергию с щёток и направляет её в обмотки.
Обмотки.
Расположены на роторе и статоре разных полярностей. Их функция в генерировании собственного магнитного поля под воздействием разных полярностей, за счёт чего якорь приходит в действие.
Сердечник статора.
Выполнен из металлических пластин. Может иметь катушку возбуждения с полярным напряжением обмотки ротора. Или — постоянные магниты. Данная конструкция зависит от источника напряжения. Является статичным элементом всего механизма.






- Стоимость меньше, чем у бесколлекторных двигателей (БД).
- Конструкция относительно проще конструкции БД.
- В виду этого, техническое обслуживание проще.
На высоких оборотах увеличивается трение щёток. Отсюда вытекает:
- Быстрый износ щёток.
- Снижение мощности инструмента.
- Появление искр.
- Задымление инструмента.
- Выход из строя инструмента раньше его «жизненного цикла».
Проблемы коллекторных двигателей
На фундаментальном уровне работа любого электродвигателя заключается в преобразовании электрической энергии в механическую. Существуют два основных физических явления, лежащих в основе устройства электрических машин:
- Электрические и магнитные поля взаимосвязаны. То есть каждый движущийся заряд создаёт магнитное поле и, соответственно, магнитные поля способны производить разность потенциалов.
- Магниты взаимодействуют между собой. Работа всех электродвигателей основана на взаимодействии магнитов. Одни из них постоянные, другие представляют собой катушку, в которой индуцируется магнитное поле прохождением через витки электрического тока.
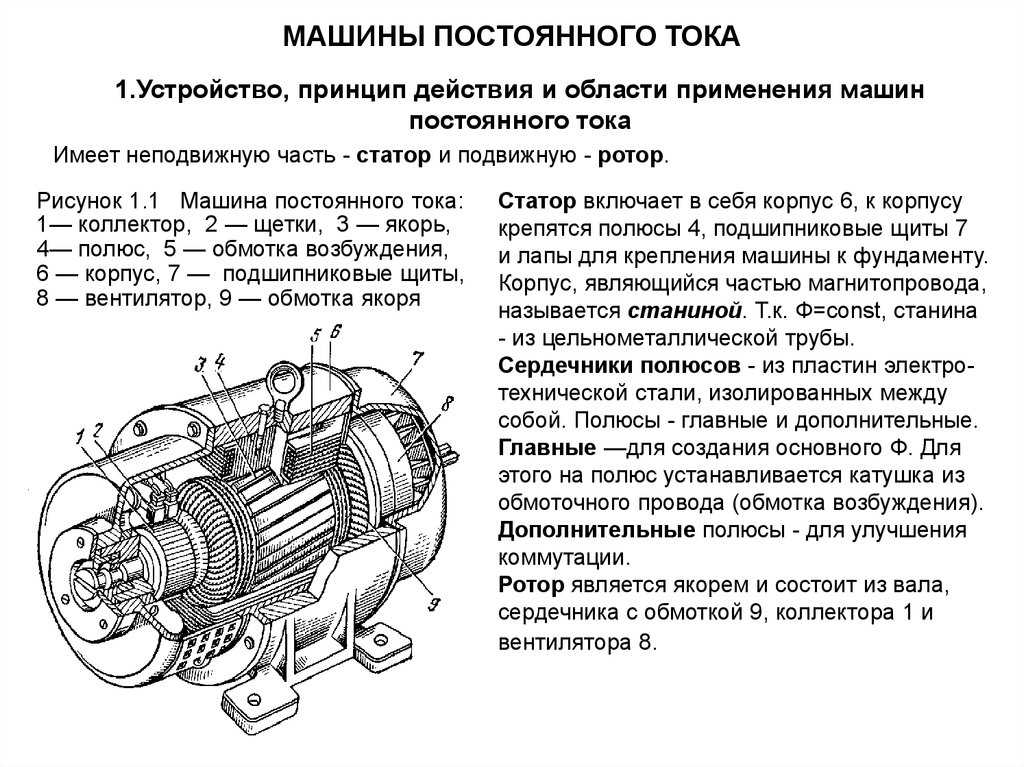
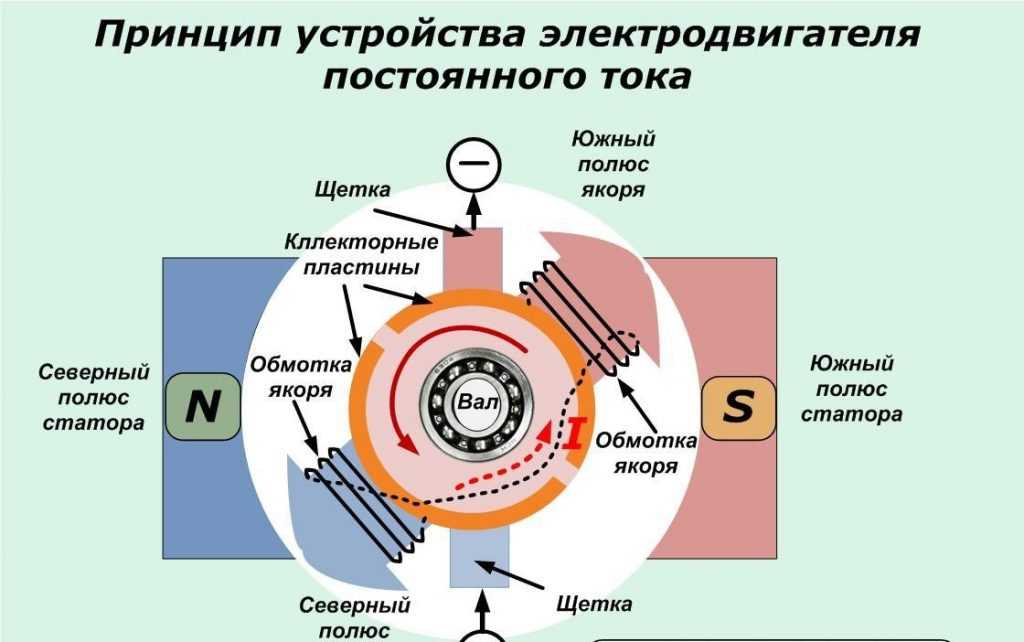
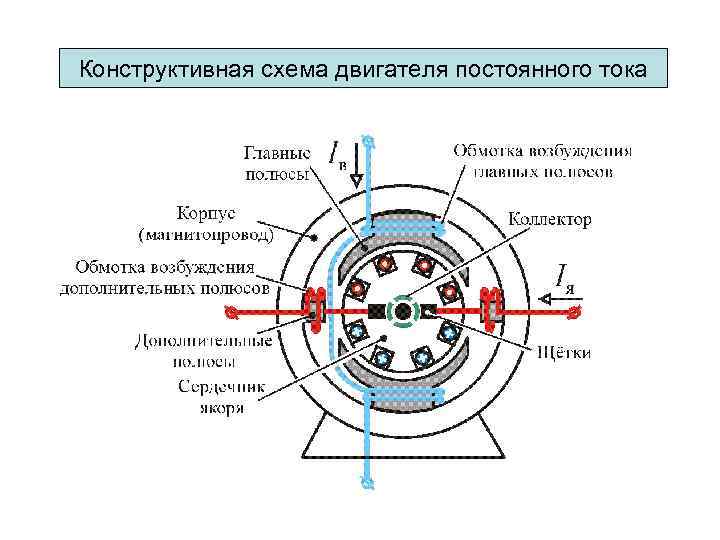
Двигатель сконструирован таким образом, что магнитные поля, создаваемые на каждом из магнитов, всегда взаимодействуют между собой, придавая ротору вращение. Традиционный электродвигатель постоянного тока состоит из четырёх основных частей:
- статор (неподвижный элемент с кольцом из магнитов);
- якорь (вращающийся элемент с обмотками);
- угольные щётки;
- коллектор.
Такая конструкция предусматривает вращение якоря и коллектора на одном валу относительно неподвижных щёток. Ток проходит от источника через подпружиненные для хорошего контакта щётки на коммутатор, который распределяет электричество между обмотками якоря. Магнитное поле, индуцированное в последних, взаимодействует с магнитами статора, что заставляет статор вращаться.
https://youtube.com/watch?v=Yy9lJFcwkYQ
Главный недостаток традиционного двигателя в том, что механический контакт на щётках невозможно обеспечить без трения. При увеличении скорости проблема проявляет себя сильнее. Коллекторный узел изнашивается со временем и, кроме того, склонен к искрению и способен ионизировать окружающий воздух. Таким образом, несмотря на простоту и дешевизну в изготовлении, подобные электродвигатели обладают некоторыми непреодолимыми недостатками:
- износ щёток;
- электрические помехи в результате искрения;
- ограничения в максимальной скорости;
- сложности с охлаждением вращающегося электромагнита.
https://youtube.com/watch?v=mv59vNMhQdo
Коллекторный двигатель постоянного тока
Коллекторные двигатели постоянного тока являются самыми дешевыми, простыми и легкими в управлении из всех технологий двигателей, обсуждаемых в данной статье
Они идеально подходят для проектов с ограниченным бюджетом, которые не требую какого-либо точного управления позиционированием, и для которых отношение мощность/масса не очень важно
 Оценка характеристик коллекторных двигателей постоянного тока
Оценка характеристик коллекторных двигателей постоянного тока
Коллекторные двигатели постоянного тока также полезны для проектов, требующих чрезвычайно простого управления. Эти типы двигателей могут управляться не более чем замыканием/размыканием ключа
Управление их скоростью – это просто регулировка напряжения, подаваемого на двигатель или изменение коэффициента заполнения (или скважности) ШИМ сигнала, если задействован микроконтроллер
 Пример коллекторного двигателя постоянного тока, используемого в проекте
Пример коллекторного двигателя постоянного тока, используемого в проекте
Наборы для создания роботов для начинающих
Наборы для создания роботов для начинающих почти повсеместно используют коллекторные двигатели постоянного тока из-за их низкой стоимости и потому, что для их работы не требуются современные микроконтроллеры или сложное программирование.
Используя два двигателя с двумя колесами на каждой стороне шасси робота, мы можете создать достаточно сложного робота. Многие из базовых наборов робототехники такого типа доступны в магазинах.
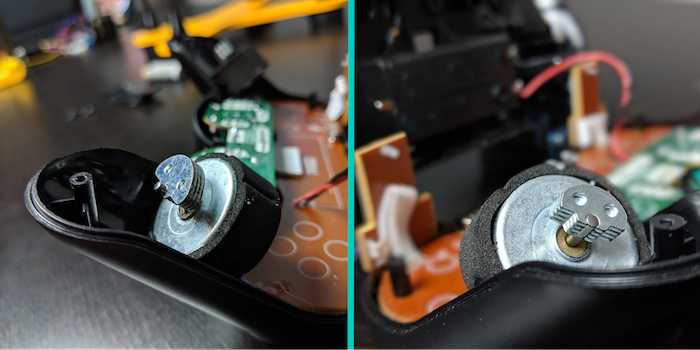
Конструкции, использующие вибромоторы
Вибромоторы состоят из коллекторного двигателя постоянного тока с грузом, прикрепленным асимметрично к валу двигателя. Вы можете использовать вибромоторы в самодельных контроллерах и в любых других проектах, требующих доставки пользователю неслышимых уведомлений (например, как ваш телефон в режиме вибрации).
Из-за простоты управления коллекторными двигателями постоянного тока интенсивность вибрации можно модулировать, просто регулируя напряжение, подаваемое на двигатель.
Разновидности
Трехполюсной ротор на подшипниках скольжения;
Двухполюсной статор на постоянных магнитах;
В качестве щеток коллекторного узла.
Этот набор характерен для самых маломощных решений, используемых обычно в детских игрушках, где не требуется большая мощность. В состав более мощных двигателей включается еще несколько конструктивных элементов:
Четыре графитовые щетки в виде коллекторного узла;
Ротор с несколькими полюсами на подшипниках качения;
Статор из постоянных магнитов с четырьмя полюсами.
Чаще всего устройство электродвигателя такого типа используется в современных автомобилях для реализации привода вентилятора системы охлаждения и вентиляции, насосов омывателей, дворников и прочих элементов. Существую и более сложные агрегаты.




Мощность электродвигателя в несколько сотен ватт предполагает использование в составе четырехполюсного статора, выполненного из электромагнитов. Для подключения его обмоток может использоваться один из нескольких способов:
Последовательно с ротором. В данном случае получается большой максимальный момент, однако из-за больших оборотов холостого хода велик риск повреждения двигателя.
Параллельно с ротором. В данном случае обороты остаются стабильными в условиях изменяющейся нагрузки, однако максимальный момент заметно меньше.
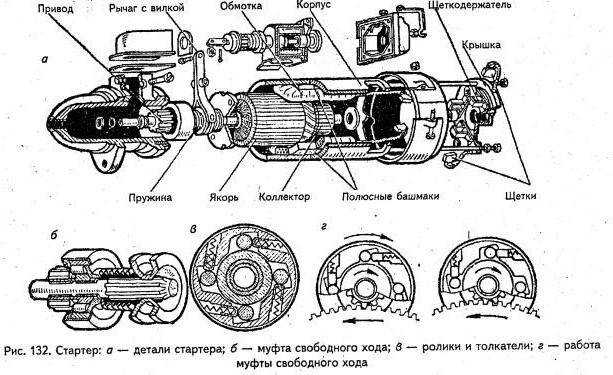
Смешанное возбуждение, когда часть обмотки подключается последовательно, а часть параллельно. В данном случае совмещены достоинства предыдущих вариантов. Используется этот тип для стартеров автомобилей.
Независимое возбуждение, при котором используется отдельный источник питания. В данном случае получаются характеристики, соответствующие параллельному подключению. Используется этот вариант довольно редко.
Коллекторный электродвигатель обладает определенными достоинствами: их просто изготавливать, ремонтировать, эксплуатировать, а их ресурс работы достаточно велик. В качестве недостатков обычно выделяется следующий: эффективные конструкции подобных устройств обычно являются быстроходными и низкомоментными, поэтому большинство приводов требует установки редукторов. Это утверждение вполне обосновано, так как электрическая машина, ориентированная на низкую скорость, характеризуется заниженным КПД, а также связанными с этим проблемами охлаждения. Последние таковы, что для них сложно найти изящное решение.
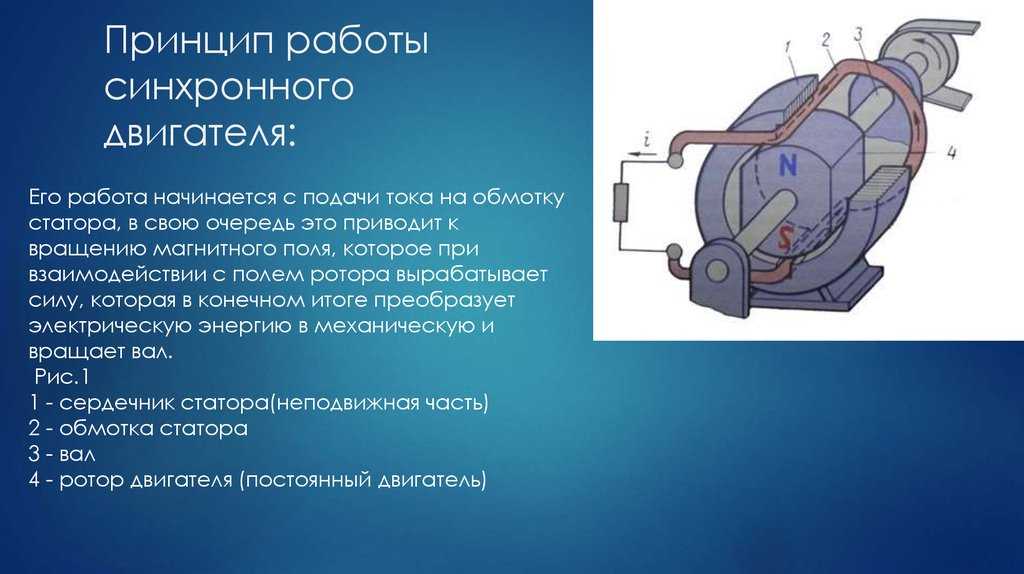
Как работает синхронный электродвигатель
Синхронные машины применяют часто в качестве генераторов. Он синхронно работают с частотой сети, поэтому он с датчиком положения инвертора и ротора, является электронным аналогом коллекторного электродвигателя постоянного тока.
Свойства
Эти двигатели не являются механизмами самозапускающимися, а требуют внешнего воздействия для того, чтобы набрать скорость. Применение они нашли в компрессорах, насосах, прокатных станках и подобном оборудовании, рабочая скорость которого не превышает отметки пятьсот оборотов в минуту, но требуется увеличение мощности. Они достаточно большие по габаритам, имеют «приличный» вес и высокую цену.
Запустить синхронный электродвигатель можно несколькими способами:
- Используя внешний источник тока.
- Пуск асинхронный.
В первом случае, с помощью мотора вспомогательного, в качестве которого выступать может электродвигатель постоянного тока или индукционный трехфазный мотор. Изначально ток постоянный на мотор не подается. Он начинает вращаться, достигая близкой к синхронной скорости. В этот момент подается постоянный ток. После замыкания магнитного поля, разрывается связь с вспомогательным двигателем.
Во втором варианте необходима установка в полюсные наконечники ротора дополнительной короткозамкнутой обмотки, пересекая которую магнитное вращающееся поле индуцирует токи в ней. Они, взаимодействуя с полем статора, вращают ротор. Пока он не достигнет синхронной скорости. С этого момента крутящий момент и ЭДС уменьшаются, магнитное поле замыкается, сводя к нулю крутящий момент.
Эти электродвигатели менее чувствительны, чем асинхронные, к колебаниям напряжения, отличаются высокой перегрузочной способностью, сохраняют неизменной скорость при любых нагрузках на валу.
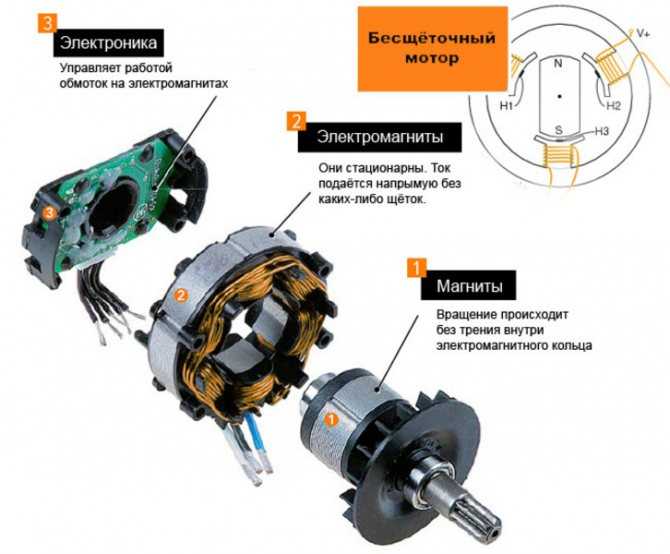
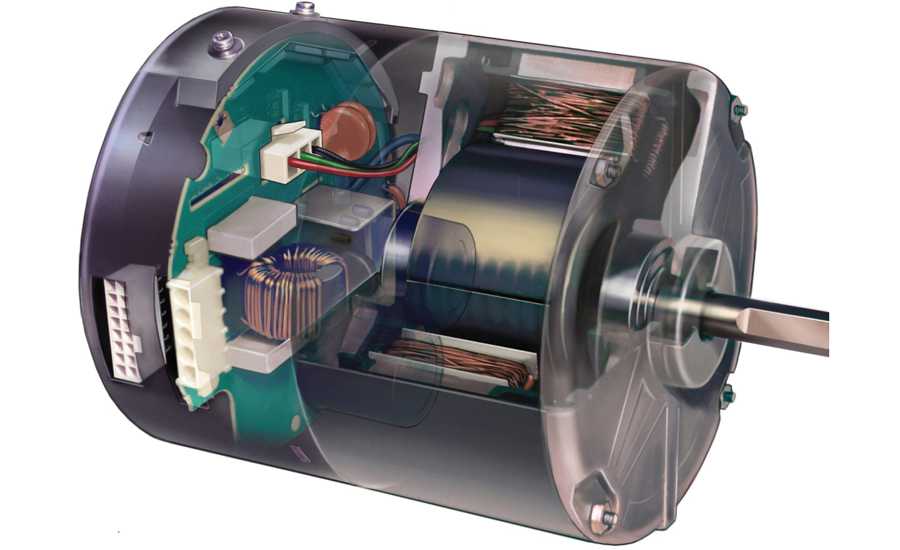
Как работает бесщеточный двигатель
В 1970-х годах произошел скачок в сфере полупроводниковой электроники, благодаря которому было решено устранить коллектор и щетки в двигателях постоянного тока. В бесщеточном двигателе усилитель заменил собой механические соединения контактов. Электронный датчик понимает угол поворота ротора и способен контролировать полупроводниковые переключатели. Отказ от скользящих контактов привел к снижению трения в механизме, а значит, и увеличению срока службы.
Бесщеточный двигатель в шуруповерте гораздо эффективнее и меньше страдает от износа. Также он гораздо тише и обеспечивает высокий крутящий момент. Внутренние элементы полностью закрываются, благодаря чему грязь и вода не попадают внутрь. Эффективность преобразования энергии в силу позволяет получить высокий КПД.
На скорость вращение влияет не центробежная сила, а напряжение, потому двигатель может работать в заданном режиме без перебоев. Если ток начнет просачиваться или мотор намагнитится – производительность не пострадает, а скорость не отстанет от момента вращения.
https://youtube.com/watch?v=a0yXujtcVyM
При эксплуатации механизма нет нужны в использовании коммутатора и обмотки, а магнит гораздо меньше, как по массе, так и по габаритам, если сравнивать с щеточным конкурентом.
Такое решение применяется в шуруповертах, мощность которых не переходит за 5 кВт. Их неразумно устанавливать в моделях с большими параметрами. Магниты внутри корпуса чувствительны к магнитному полю и сильному нагреву.
Разница щеточного и бесщеточного шуруповерта в принципе работы двигателя:
- Ток переключается не в роторе, а в обмотках статора. На якоре не достает катушки, магнитное поле образуется благодаря специальным магнитам внутри корпуса.
- Миг, когда требуется подача электричества, определяется встроенными датчиками. Они работают по принципу эффекта Холла. ДПР импульсы и регуляторные сигналы скорости проходят через встроенный процессор, где и формируются. Это называется ШИМ сигналом.
- Образованные импульсы в порядке друг за другом направляются на инверторы или, если проще, усилители – они увеличивают полученный ток. Их выходы связаны с обмоткой на статоре. Инверторы необходимы для коммутирования тока, возникающего в катушках, следуя импульсам, которые подаются из узла внутреннего процессора.
В результате описанного процесса формируется магнитное поле, которое связывается с тем, что вокруг ротора. Якорь начинает вращение – инструмент работает.

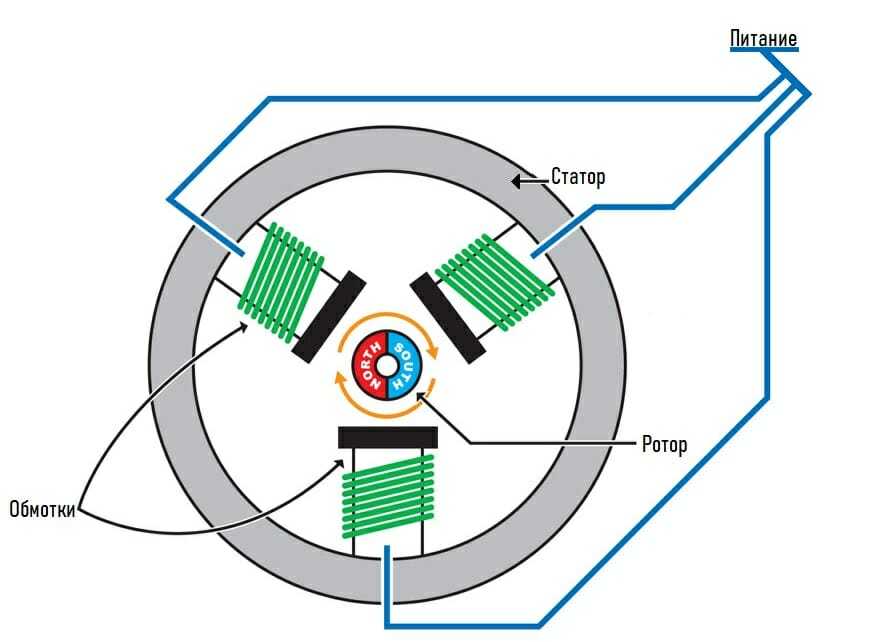

Принцип работы БДКП
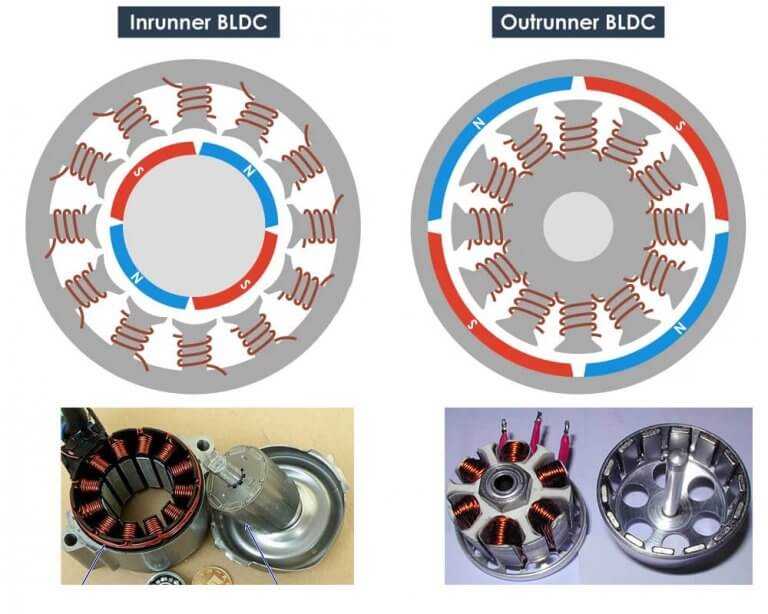
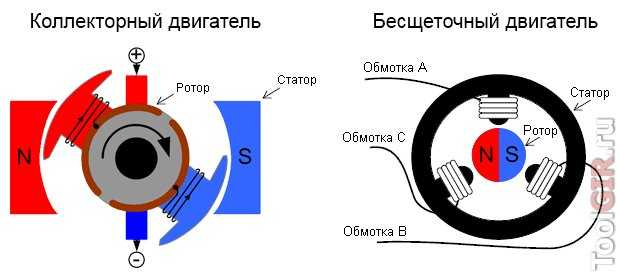
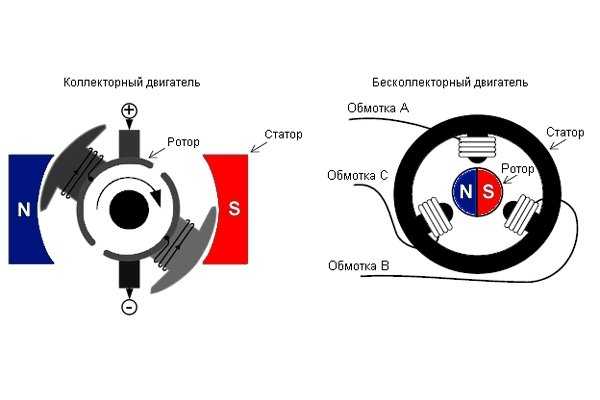
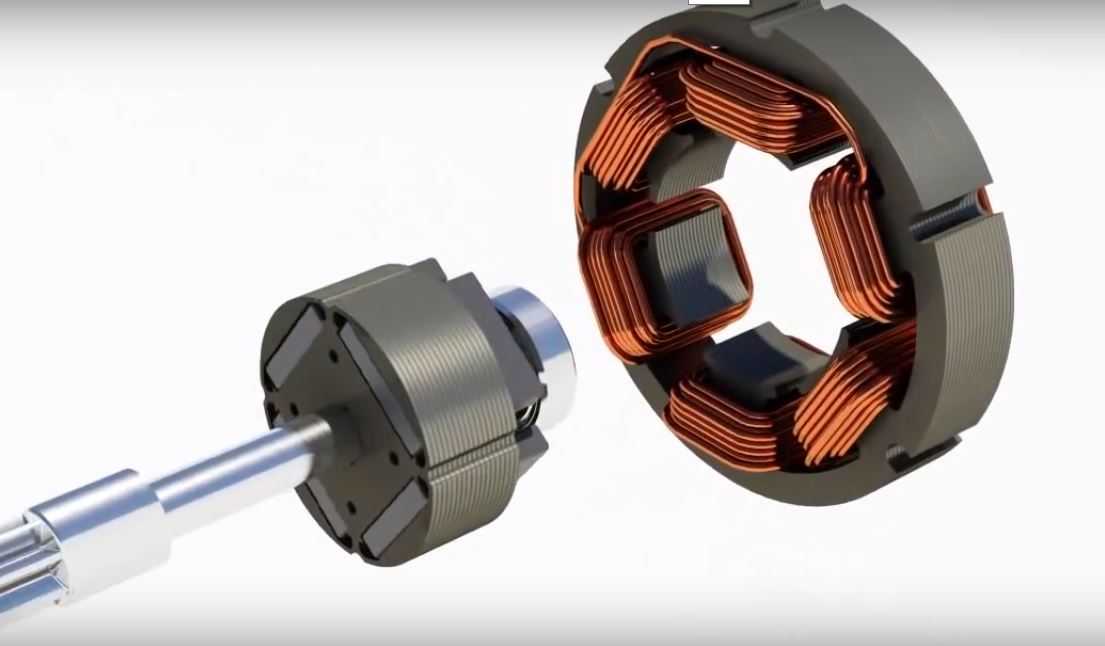
 В бесколлекторном электродвигателе, в отличие от предшественника, роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП — его обмотки расположены на статоре, что исключает необходимость в коллекторе.
В бесколлекторном электродвигателе, в отличие от предшественника, роль механического коммутатора выполняет электронный преобразователь. Это позволяет осуществить «вывернутая наизнанку» схема БДКП — его обмотки расположены на статоре, что исключает необходимость в коллекторе.
Иными словами, основное принципиальное различие между классическим двигателем и БДКП в том, что вместо стационарных магнитов и вращающихся катушек последний состоит из неподвижных обмоток и вращающихся магнитов. Несмотря на то что сама коммутация в нём происходит похожим образом, её физическая реализация в бесщёточных приводах гораздо более сложна.
https://youtube.com/watch?v=t5QEkL-WwOU
Необходимые данные для обработки электроникой получают двумя способами:
- детектированием абсолютного положения вала;
- измерением напряжения, индуцируемого в обмотках статора.
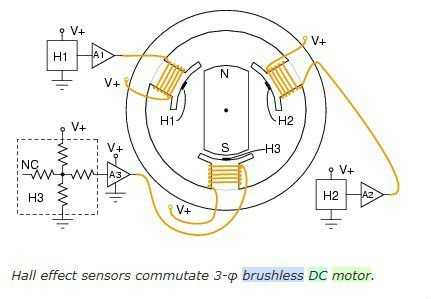
 Для реализации контроля первым способом чаще всего используют либо оптические пары, либо закреплённые неподвижно на статоре датчики Холла, реагирующие на магнитный поток ротора. Главным достоинством подобных систем сбора информации о положении вала является их работоспособность даже при очень низких скоростях и в состоянии покоя.
Для реализации контроля первым способом чаще всего используют либо оптические пары, либо закреплённые неподвижно на статоре датчики Холла, реагирующие на магнитный поток ротора. Главным достоинством подобных систем сбора информации о положении вала является их работоспособность даже при очень низких скоростях и в состоянии покоя.
Бессенсорный контроль для оценки напряжения в катушках требуется хотя бы минимального вращения ротора. Поэтому в таких конструкциях предусмотрен режим запуска двигателя до оборотов, при которых напряжение на обмотках может быть оценено, а состояние покоя тестируется с помощью анализа влияния магнитного поля на тестовые импульсы тока, проходящие через катушки.
Несмотря на все перечисленные конструктивные сложности, бесщёточные двигатели завоёвывают всё большую популярность благодаря своей производительности и недоступному для коллекторных набору характеристик. Краткий перечень основных преимуществ БДКП перед классическими выглядит так:
- отсутствие механических потерь энергии на трении щёток;
- сравнительная бесшумность работы;
- лёгкость ускорения и замедление вращения благодаря малой инерции ротора;
- точность управления вращением;
- возможность организации охлаждения за счёт теплопроводности;
- способность к работе на высоких скоростях;
- долговечность и надёжность.
https://youtube.com/watch?v=-yrlzgSqTME
Техническая версия происхождения названия
По поводу происхождения этого термина, существует две версии, каждая из которых вполне правдоподобна. Согласно первой, наиболее распространенной, брно – аббревиатура, расшифровывающаяся как «блок расключения (или распределения) начал обмоток». Такая расшифровка выглядит вполне приемлемой, так как термином «брно двигателя», обозначается клеммная коробка, установленная на его корпусе, и в ней действительно соединяются определенным образом (расключаются) выводы концов обмоток электродвигателя.
Возможно, что причиной появления столь странного для русского языка названия, стало чрезмерное увлечение аббревиатурами в 20 30 х годах, когда и происходила «электрификация всей страны». Название «ГОЭЛРО», кстати, тоже аббревиатура – «Государственный план электрификации России».
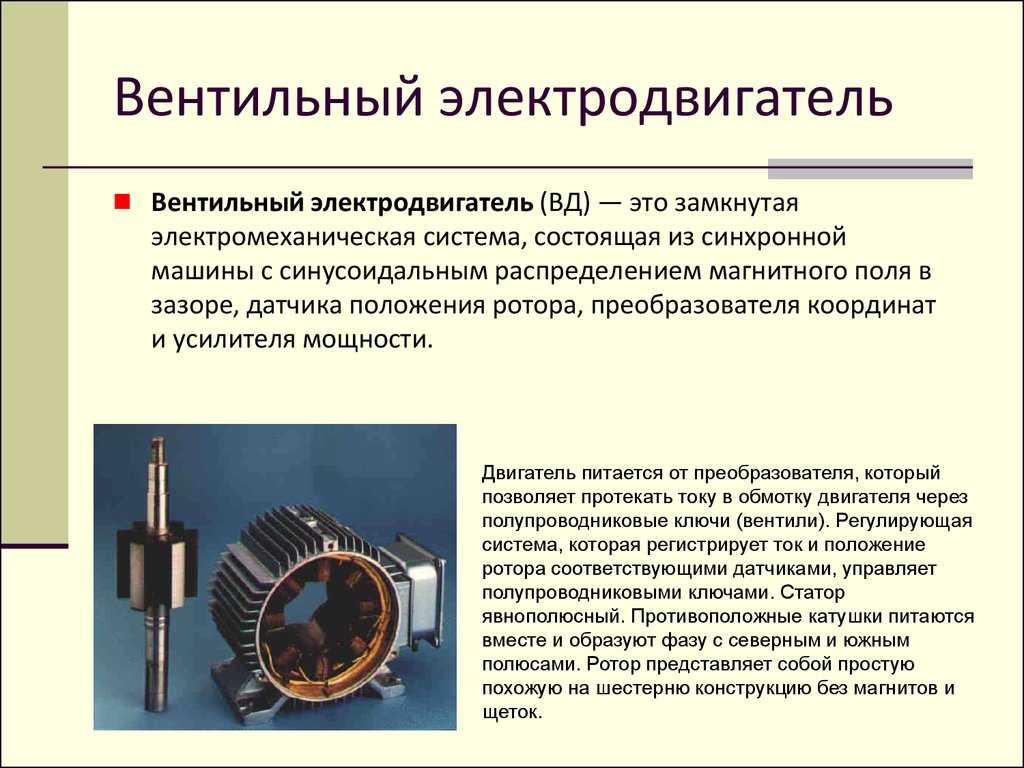
Описание ВД
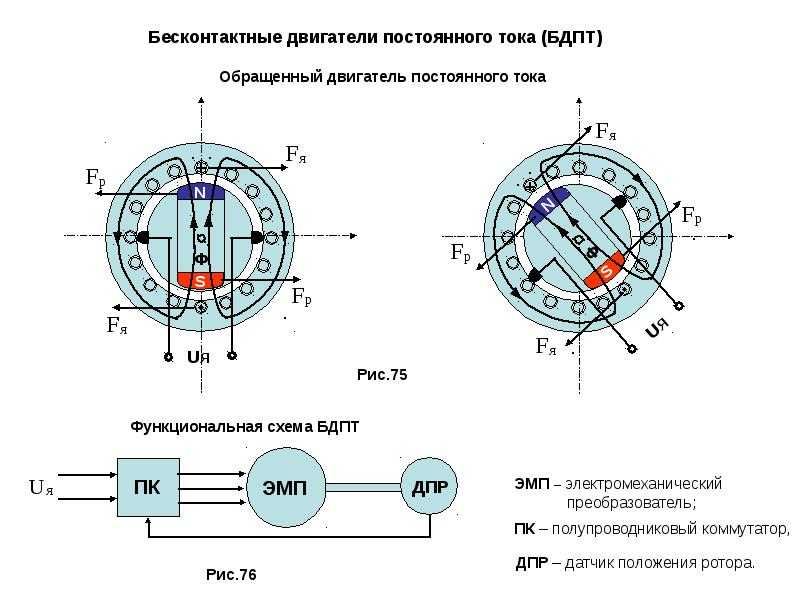
Этот тип двигателя создан с целью улучшения свойств электродвигателей постоянного тока . Высокие требования к исполнительным механизмам (в частности, высокооборотных микроприводов точного позиционирования) обусловили применение специфических двигателей постоянного тока: бесконтактных трехфазных двигателей постоянного тока (БДПТ или BLDC). Конструктивно они напоминают синхронные двигатели переменного тока: магнитный ротор вращается в шихтованом статоре с трехфазными обмотками. Но обороты являются функцией от нагрузки и напряжения на статоре. Эта функция реализована с помощью переключения обмоток статора в зависимости от координат ротора. БДПТ существуют в исполнении с отдельными датчиками на роторе и без отдельных датчиков. В качестве отдельных датчиков применяются датчики Холла. Если выполнение без отдельных датчиков, то в качестве фиксирующего элемента выступают обмотки статора. При вращении магнита, ротор наводит в обмотках статора ЭДС, в результате чего возникает ток. При выключении одной обмотки измеряется и обрабатывается сигнал, который был в ней наведен. Этот алгоритм требует процессора обработки сигналов. Для торможения и реверса БДПС не нужна мостовая схема реверса питания — достаточно подавать управляющие импульсы на обмотки статора в обратной последовательности.
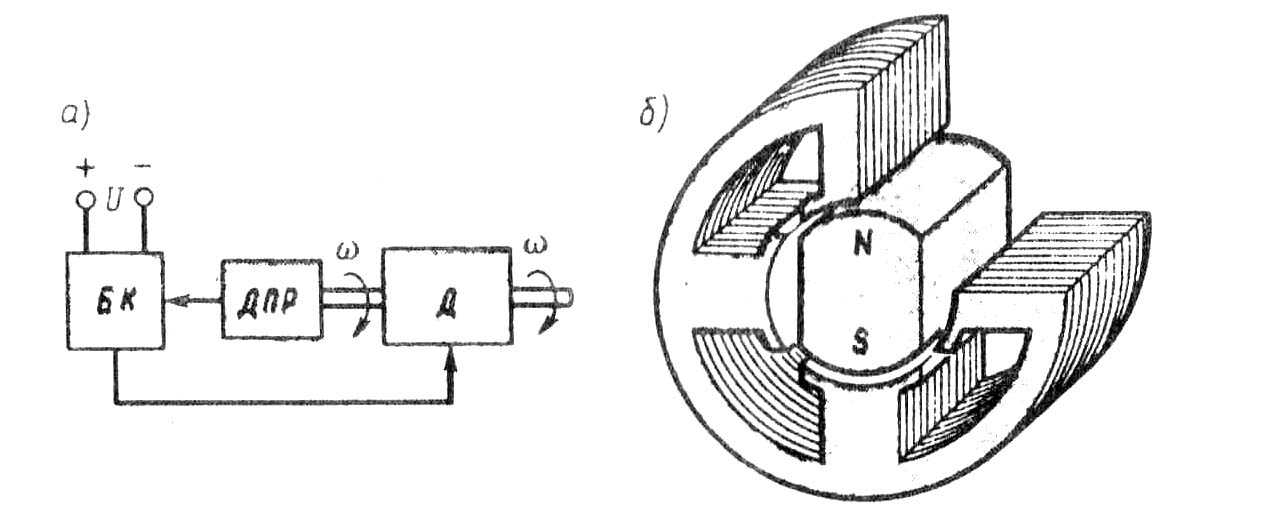
Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора.
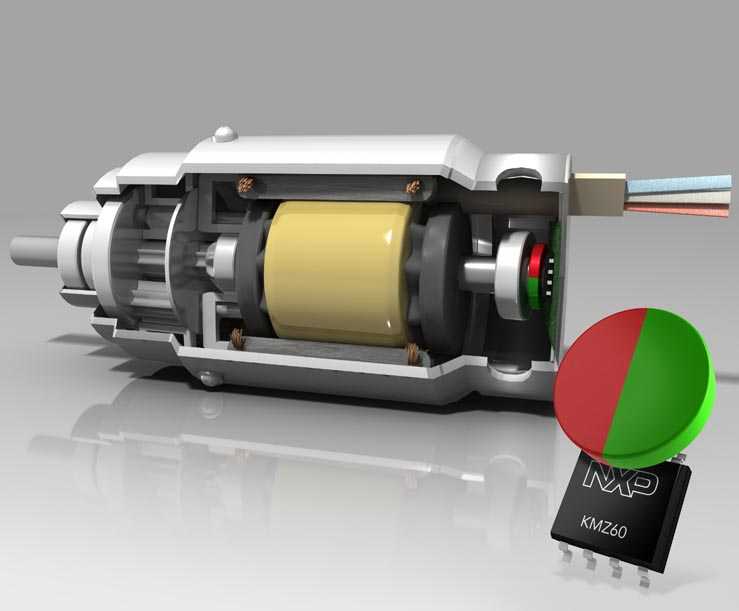
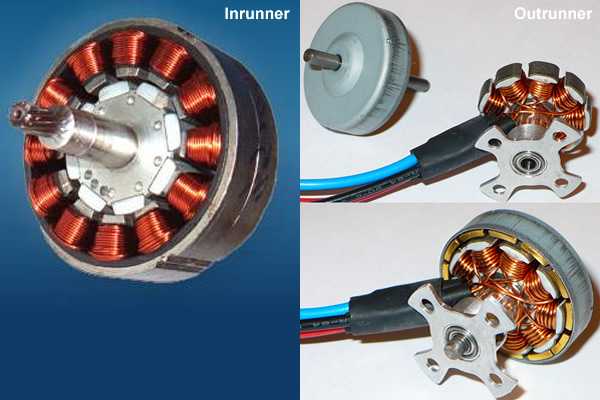
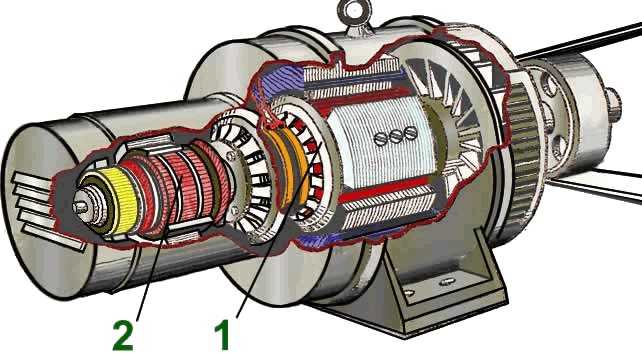
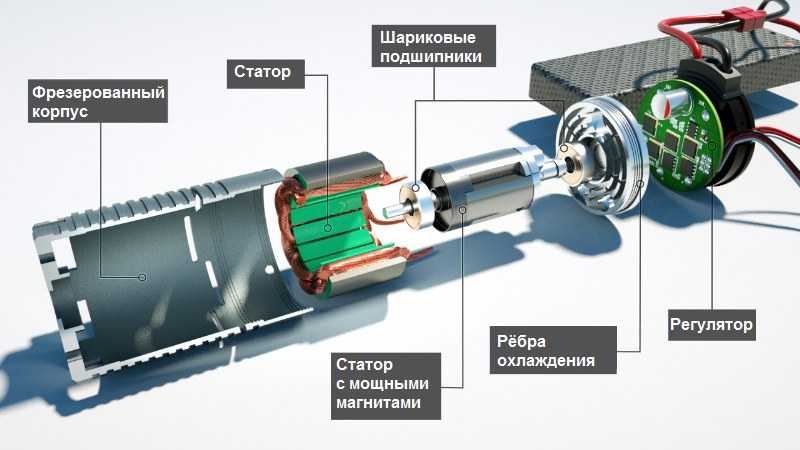
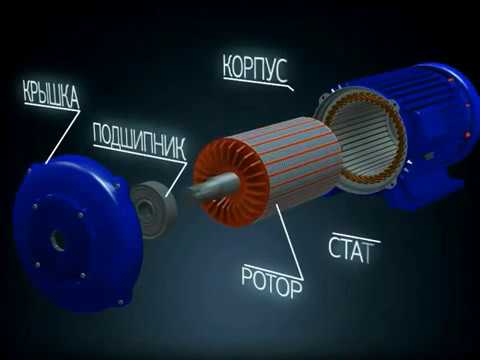
Статор
Статор бесколлекторного электродвигателя
Статор имеет традиционную конструкцию и похож на статор асинхронной машины . Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные, реже- четырёхфазные.
По способу укладки витков в обмотки статора различают двигатели имеющие обратную электродвижущую силу трапецеидальной (BLDC) и синусоидальной (PMSM) формы. По способу питания фазный электрический ток в соответствующих типах двигателя также изменяется трапецеидально или синусоидально.
Ротор
Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов.
Вначале для изготовления ротора использовались ферритовые магниты. Они распространены и дёшевы, но им присущ недостаток в виде низкого уровня магнитной индукции. Сейчас получают популярность магниты из сплавов редкоземельных элементов , так как они позволяют получить высокий уровень магнитной индукции и уменьшить размер ротора.
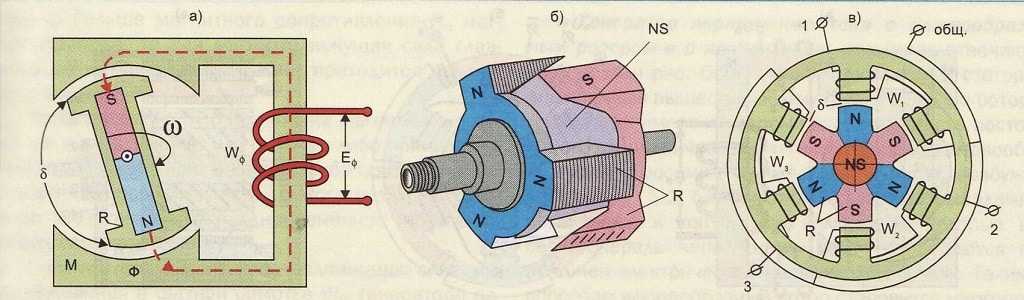
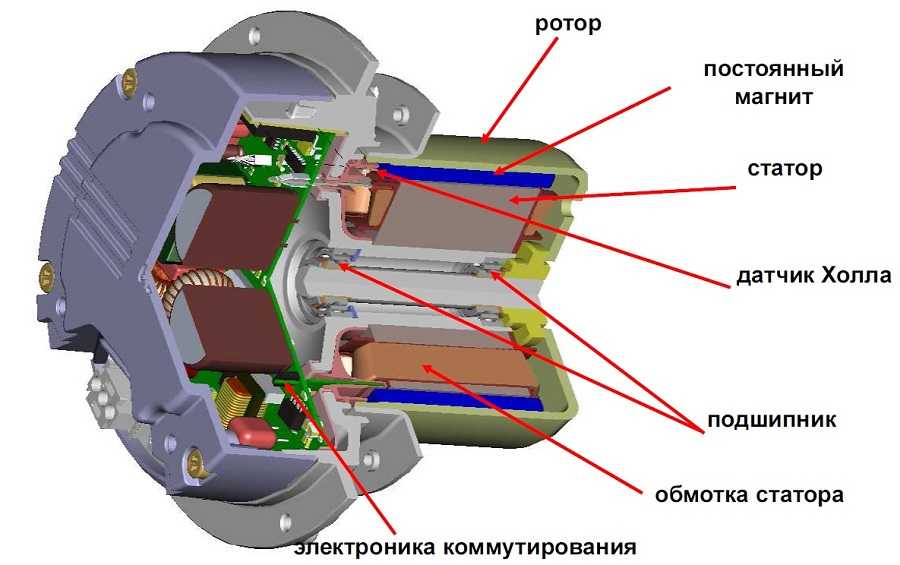
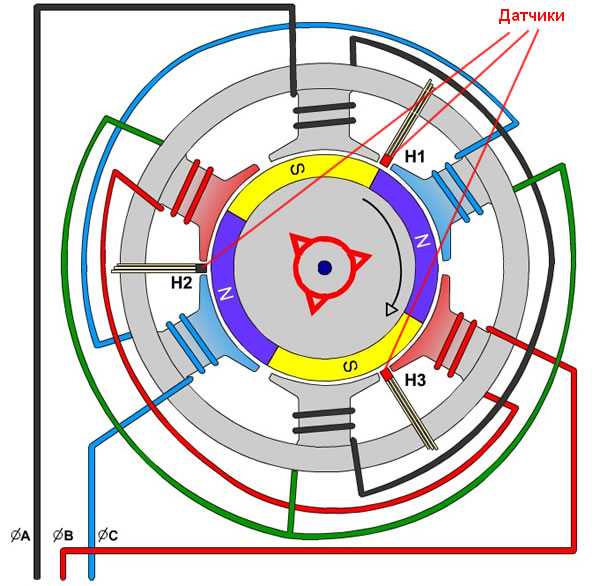
Датчик положения ротора
Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический , индуктивный, на эффекте Холла , и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
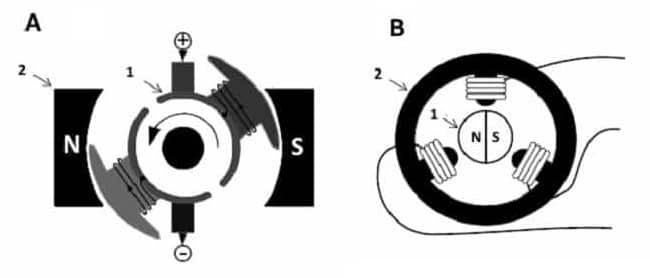
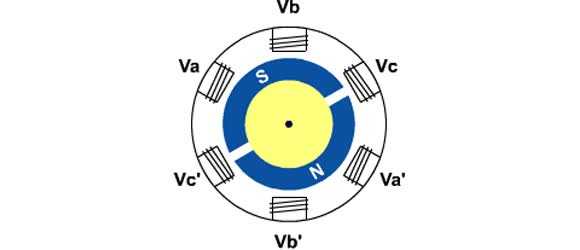
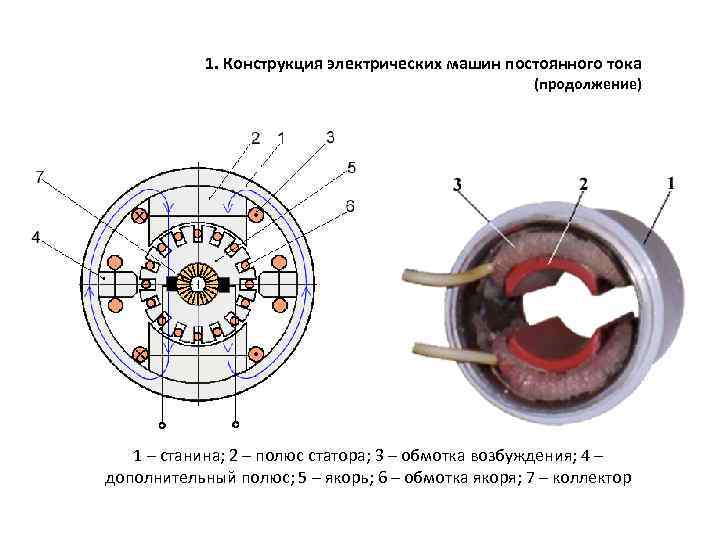
Фотоэлектрический датчик, в классическом виде, содержит три неподвижных фотоприёмника, которые поочерёдно закрываются шторкой вращающейся синхронно с ротором. Это показано на рисунке 1 (желтая точечка). Двоичный код, получаемый с ДПР, фиксирует шесть различных положений ротора. Сигналы датчиков преобразуются управляющим устройством в комбинацию управляющих напряжений, которые управляют силовыми ключами, так, что в каждый такт (фазу) работы двигателя включены два ключа и к сети подключены последовательно две из трёх обмоток якоря. Обмотки якоря U, V, W расположены на статоре со сдвигом на 120° и их начала и концы соединены так, что при переключении ключей создаётся вращающийся градиент магнитных полей.



Описание и принцип работы
Бесщеточный (бесколлекторный) двигатель постоянного тока очень похож на двигатель постоянного тока с постоянными магнитами, но не имеет щеток для замены или износа из-за искрения коммутатора.
Поэтому в роторе выделяется мало тепла, что увеличивает срок службы двигателей.
Конструкция бесщеточного двигателя устраняет необходимость в щетках благодаря более сложной схеме привода, в которой магнитное поле ротора является постоянным магнитом, который всегда синхронизирован с полем статора, что позволяет более точно контролировать скорость и крутящий момент.
Управление бесщеточными двигателями постоянного тока очень отличается от обычного щеточного двигателя постоянного тока тем, что этот тип двигателя включает в себя некоторые средства для определения углового положения роторов (или магнитных полюсов), необходимые для получения сигналов обратной связи, необходимых для управления переключением полупроводников. Появление процессорной техники и силовых транзисторов позволило конструкторам отказаться от узла механической коммутации и изменить роль ротора и статора в электромоторе постоянного тока.
Другие сравнения
При сопоставлении коллекторных и асинхронных двигателей одинаковой мощности, вне зависимости от номинальной частоты последних, получается разная характеристика. Далее это будет описано подробнее. Универсальный коллекторный электродвигатель реализует «мягкую» характеристику. В данном случае момент прямо пропорционален нагрузке на валу, при этом обороты обратно пропорциональны ей. Номинальный момент обычно меньше максимального в 3-5 раз. Ограничение оборотов холостого хода характеризуется исключительно потерями в двигателе, при этом при включении мощного агрегата без нагрузки он может разрушиться.
Характеристикой асинхронного двигателя является «вентиляторная», то есть агрегат поддерживает частоту вращения, приближенную к номинальной, увеличивая момент максимально резко при незначительном снижении оборотов. Если речь идет о значительном изменении этого показателя, то момент двигателя не только не растет, но и падает до нулевой отметки, что приводит к полной остановке. Обороты холостого хода немного превышают номинальные, при этом остаются постоянными. Характеристикой однофазного асинхронного двигателя является дополнительный набор проблем, сопряженных с запуском, так как он не развивает пускового момента в нормальных условиях. Магнитное поле однофазного статора, пульсирующее во времени, распадается на два поля с противоположными фазами, из-за чего пуск без всевозможных ухищрений становится невозможным:
Емкость, создающая искусственную фазу;
Расщепленный паз;
Активное сопротивление, формирующее искусственную фазу.
Теоретически поле, вращающееся в противофазе, снижает максимальный КПД однофазного асинхронного агрегата до 50-60% из-за потерь в перенасыщенной магнитной системе и обмотках, нагружаемых токами противополя. Получается, что на одном валу находятся две электрические машины, при этом одна работает в двигательном режиме, а вторая — режиме противовключения. Получается, что электродвигатели однофазные коллекторные не знают конкурентов в соответствующих сетях. Чем и заслужили столь высокую популярность.
Механические характеристики электродвигателя обеспечивает ему определенную сферу использования. Малые обороты, ограниченные частотой сети переменного тока, делают асинхронные агрегаты аналогичной мощности большими по весу и размеру в сравнении с универсальными коллекторными. Однако при включении в цепь питания инвертора с высокой частотой можно добиться соизмеримых размеров и веса. Остается жесткость механической характеристики электродвигателя, к которой добавляются потери на токопреобразование, а также увеличение частоты, повышаются магнитные и индуктивные потери.
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть с постоянными магнитами и с обмотками возбуждения.
Коллекторный двигатель с постоянными магнитами
Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. Индуктор этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора . КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
Преимущества:лучшее соотношение цена/качество
высокий момент на низких оборотах
быстрый отклик на изменение напряжения
постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
- По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:
- независимого возбуждения
- последовательного возбуждения
- параллельного возбуждения
- смешанного возбуждения
Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой якоря (рисунок выше). Обычно напряжение возбуждения UОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы .
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения
питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается.При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.




Преимущества:практически постоянный момент на низких оборотах
хорошие регулировочные свойства
отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
Недостатки:дороже КДПТ ПМ
двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет механическую характеристику с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с КДПТ ПМ, двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным. Недостатками двигателя параллельного возбуждения являются более высокая себестоимость и возможность выхода двигателя из под контроля, в случае если ток индуктора снизится до нуля, что в свою очередь может привести к поломке двигателя .
https://youtube.com/watch?v=uPdv7l9zx2c





![Мой первый эксперимент по замене колец [архив]](http://oksimetr.ru/wp-content/uploads/c/7/8/c784673d918acef231a8e6d0e6b7424e.jpeg)